插電式串聯混合動力汽車發動機起停控制策略的優化*
2011-02-27 08:34:54李獻菁孫永正胡宗杰李理光
汽車工程 2011年2期
李獻菁,孫永正,鄧 俊,胡宗杰,李理光
(同濟大學汽車學院,上海 201804)
前言
插電式混合動力汽車(plug-in hybrid electric vehicle,PHEV)可以通過充電裝置從電網獲取電能,通常該類汽車還具有一定的純電動行駛能力。因其較多地使用網電,燃料消耗低,節能減排效果顯著,被認為是一種當前最易接受的、市場前景樂觀的混合動力電動汽車驅動模式。
目前對PHEV的研究主要集中在不同行駛工況[1-2]、燃油經濟性計算方法[3]、動力參數匹配[4]、控制策略及不同能源的使用[5]等方面對燃油經濟性的影響。針對串聯混合動力汽車(SHEV)的研究主要集中在控制策略和動力參數匹配方面。研究表明,SHEV可將發動機調整在最佳工作點附近穩定運轉,使發動機避免怠速和低速運轉的工況,從而提高了發動機的效率,減少了廢氣排放。單獨針對插電式串聯混合動力汽車(plug-in series hybrid electric vehicle,PSHEV)的研究則少見報道。
除車輛的行駛工況和動力參數匹配等因素外, PSHEV的燃油經濟性還與兩次外接充電間隔所行駛的距離和發動機的運行時間、起停控制策略等有關[6]。本文中基于某PSHEV車,結合不同行駛循環工況和行駛里程,對車輛行駛過程中發動機的起停控制策略進行優化。
1 整車參數及能量管理策略
1.1 整車參數
文中介紹的PSHEV整車參數及性能仿真結果見表1。動力系統主要由發動機、ISG電機、驅動電機、機械傳動裝置和動力電池等部分組成。發動機和ISG電機同軸連接,動力電池通過控制器串接在ISG電機和驅動電機之間,動力系統示意圖如圖 1所示,各部件參數見表 2。
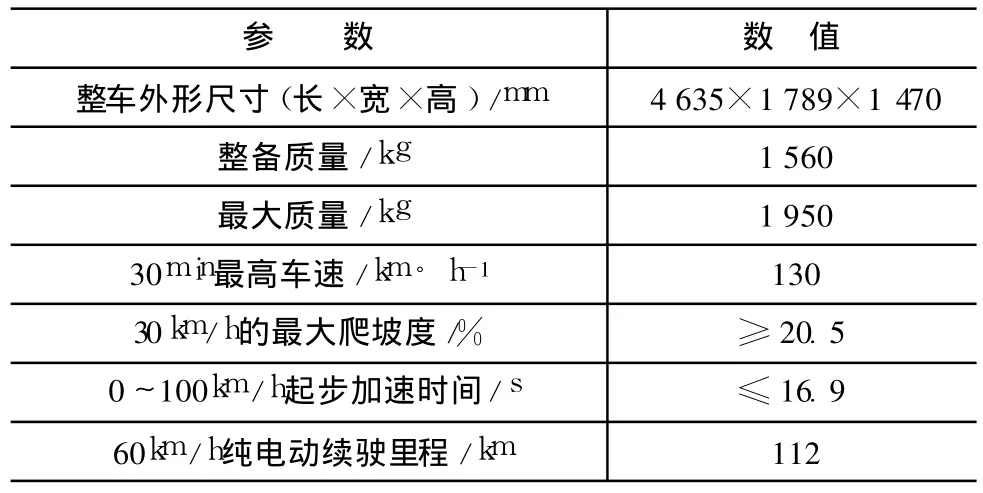
表1 PSHEV整車參數

表2 動力系統各部件參數
1.2 PSHEV能量管理策略
通常PSHEV能量管理策略可分電量消耗和電量維持兩個階段。電量消耗階段主要消耗電池電能,實現“零排放”行駛,而電量維持階段主要消耗發電機發出的電能[7]。文中介紹的PSHEV采用基于規則的邏輯門限開關控制策略實現兩個階段的過渡,因此,動力電池的 SOC上下限值和發動機的工作區域是影響整車經濟性的關鍵因素。
1.2.1 電池SOC范圍
按照目前車輛報廢標準,轎車的報廢年限是 10~15年,若電池每天都進行一次滿充深放電,則需要電池的循環壽命在 4 000次以上。如圖 2所示,當放電深度在60%~35%時,鋰電池的循環壽命可達到此要求[8]。
通過仿真計算可以得出不同車速下電池電壓隨SOC的變化關系[9],為保證電機的正常工作電壓,將SOC的界限值設為 90%~30%。根據日常出行情況,并不是每天都滿充深放電,電池的放電深度為70%時,更有利于延長電池的壽命。
1.2.2 發動機工作區域
圖3為發動機等燃油消耗率曲線。發動機采用恒功率控制策略,在不考慮附件的情況下,通過直接起停技術取消發動機怠速,使發動機起動后即工作在2 400r/min,55N·m的恒轉速恒轉矩工況點,如圖 3中黑點所示。該工況點靠近發動機的最佳燃油經濟性曲線,處于燃油經濟性較好的區域。
由此,當動力電池SOC小于30%時,發動機起動,在預定的高效工況點工作;當SOC大于90%時,發動機則停機,進入純電動模式。
2 發動機起停控制策略優化
純電動駕駛可最大限度地利用電網充入的能量,使車輛的經濟性和排放性都達到最佳。按原控制策略,發動機工作在高效工況點,純電動續駛里程(all electric range,AER)一定時,行駛里程的長短將會影響到發動機的運行時間和起停次數,進而影響整車的經濟性。因此在行駛距離大于AER時,應考慮對發動機的起停控制策略進行優化。
2.1 原控制策略下的AER
為考察該車在日常出行過程中的AER,分別在新歐洲行駛工況(NEDC)、美國環保局的城市汽車測功器行駛規范(UDDS)、美國環保局的公路行駛規范(HWFET)、中國輕型車城區運轉循環(CUDC)和中國輕型車快速運轉循環[10](CHDC)5種行駛工況下對整車性能進行仿真計算。不同行駛工況下電池SOC和發動機工作狀態隨行駛里程的變化關系如圖4所示。
由圖4可見,在5種行駛工況下,電池SOC從90%~30%不斷下降的過程中,發動機均沒有起動,說明該車在沒有發動機輔助的情況下完全可以滿足各種行駛工況的功率需求。不同行駛工況對車輛的需求功率不一樣,電池SOC變化的快慢就不一樣,因此AER也不同,但都在60km左右。
當電池SOC下降到設定的最低限值時發動機起動,ISG電機給驅動電機提供電能。發動機起動后,在HWFET行駛工況下,SOC基本保持在一個水平,而其余4種行駛工況下,SOC均呈上升趨勢,直至達到最高限值,說明這 4種行駛工況下有較多的電能存儲到電池中。
根據美國NPTS(nationwide personal transportation survey)車輛日常行駛里程統計,用戶日行駛里程多在50km以內[11]。因此,對于 50km以內的短途行程,該車完全可以只由車載動力電池提供動力。在純電動行駛里程以外,可以依靠車載的小型發動機發電來驅動電機繼續工作,滿足更長的行駛里程需求。
2.2 初始電池滿電時發動機起停控制策略的優化
不考慮類似HWFET的行駛工況,根據原有控制策略,在下一次外接充電之前,車輛連續行駛若干個行駛工況后,電池SOC隨行駛里程的變化趨勢如圖 5實線和點劃線所示。兩者分別表示初始電池滿電及初始電池未滿電的情況。
下面從不同循環工況來分析兩次外接充電間隔期間的行駛里程大于 AER時發動機起停時刻對發動機累積運行時間(即行車充電時間)的影響。選取NEDC和UDDS工況為仿真循環工況,假設電池充滿電,電池SOC從90%下降到不同程度時起動發動機,SOC的變化情況如圖6和圖7所示,發動機工作狀態如圖 8和圖 9所示。
為了充分利用從電網得到的低價能量,要求行車過程中盡可能減少發動機起停次數和行車充電時間。結合圖 5,觀察圖中實線和雙點劃線變化情況。實線為按原控制策略行車,電池SOC下降到設定最低限值時起動發動機。雙點劃線可分為兩種情況: (1)在純電動過程中,電池SOC下降到某一值C時發動機起動,直至電池充滿電再停機轉而以純電動行駛;(2)行車充電過程中,電池SOC上升到某一值A時發動機關閉。可以發現,行駛里程同樣為 D時,這兩種方法都有利于減少發動機起停次數和運行時間。兩種方法都是使發動機給電池充入的電能剛好在下一次外接充電前用完,這樣有利于節省燃油消耗,降低成本。
不同行駛工況對電力驅動系統的需求功率不同,電池SOC變化快慢就不同,AER也不一樣,導致行車過程中發動機的起停次數和行車充電時間迥異。因此需要結合不同行駛工況下 SOC的變化量來分析確定發動機的起停時刻。在原有控制策略的基礎上,可以根據行駛里程的長短來優化發動機起停時的SOC值。首先針對以上兩種行駛工況,計算各自純電動行駛和行車充電過程中單位行駛里程的SOC變化量,結果如表3所示。

表3 單位行駛里程的SOC變化量 %/km
結合圖 5,分別在純電動運行和行車充電兩種模式下對NEDC循環工況下控制發動機起停的關鍵參數SOC值進行修正,則純電動行駛過程中,發動機起動時的SOC值為
行車充電過程中,發動機停機時的SOC值為
同樣可對UDDS循環工況進行修正。圖10、圖11分別為進行SOC修正后連續運行NEDC和UDDS循環,行駛里程為100km時SOC的變化情況。
表4和表5分別為NEDC和UDDS行駛工況下優化前后的SOC值及發動機運行時間對比。行駛里程為100km時,由上述方法可得出NEDC行駛工況的純電動過程中,SOC下降至約66%時起動發動機,相比原控制策略,整個過程發動機累計運行的時間將近減少一半,因此燃油消耗量和因發電而損失的能量也會大幅度減少;行車充電過程中,SOC上升到約 54%時關閉發動機,發動機累計運行時間為2 403s,運行時間減少46.1%。

表4 NEDC運轉循環下優化前后結果對比

表5 UDDS運轉循環下優化前后結果對比
同樣行駛里程為100km時,對于UDDS運轉循環,純電動過程中,SOC下降至約62.6%時起動發動機,發動機運行時間 2 287.6s,運行時間減少56%;行車充電過程中,SOC上升到約57.4%時關閉發動機,發動機運行時間為 2 455s,減少運行時間達52.8%。可見兩種模式下得出的結果相近。
對于CUDC和CHDC循環工況的分析結果類似。而對于 HWFET循環工況,經仿真計算,電池SOC下降到最低限值前起動發動機則會使電池電能不能充分利用,故車輛在HWFET循環下應先使電池耗盡再起動發動機再按電量保持模式繼續運行。上述公式僅適用于初始電池滿電且行駛里程介于AER和(2AER+CR)的情況。
2.3 初始電池未滿電時發動機起停控制策略的優化
車輛并不是每次出行時都能保證電池SOC處于滿電狀態。電池未充滿電,即存在不同 SOC初值。SOC初值不同,車輛在相同的行駛工況下以純電動行駛的里程也不一樣,因此,須對上述公式做相應的修正。
為盡可能利用外接充電電能,減少發動機起停次數和行車充電時間,先讓電池耗盡,再在行車充電過程中確定發動機關閉時刻。
仍以NEDC運轉循環為例,假設出行時電池的初始SOC為60%,初始純電動行駛里程為AER0。當D-AER0<AER+CR時,可確定行車充電過程中發動機關閉的SOC值為NEDC工況下行駛里程達到100km時,修正前后SOC及發動機工作狀態隨行駛里程的變化情況如圖12所示。
2.4 延展里程過程中發動機起停控制策略的優化
對于可以滿足各種行駛工況需求功率的PSHEV,不管出行時電池是否滿電,發動機的起動主要是在延展里程[12]過程中出現。不計車輛以外接充電電能純電動行駛的里程,即從發動機第一次起動到下一次外接充電時的累積行駛里程為目標延展里程。當目標延展里程介于0和(AER+CR)時,仍可按式(2)進行修正。當目標延展里程大于(AER+ CR)時則可按如下方法進行修正:
設發動機累積起動次數為n,目標延展里程為DRXT,則
經過仿真計算得到NEDC循環下的AER及行車充電至電池滿電時的里程 CR。假設發動機起動次數為 2,目標延展里程為 160km時,按照上述方法,將數據代入公式(4),并結合NEDC運轉循環進行仿真計算,可以得到電池SOC及發動機運行狀態隨行程的變化關系,如圖 13所示。
從圖中可見,整個過程發動機須起動 2次,在第2次起動后對SOC進行修正。當SOC上升到59%時關閉發動機,利用發電機給電池充入的電能繼續后面的路程。
綜上所述,在整個延展里程行駛過程中,都可用此方法對行車充電過程中發動機的關閉時刻進行優化修正,以利于縮短行車充電時間,充分利用電網電能對電池進行充電,達到節能減排的效果。
3 結論
(1)與原控制策略相比,根據不同循環工況和行駛里程確定純電動過程中起動發動機和行車充電過程中停機時的SOC值的方法,可有效縮短行車充電時間,減少因發動機充電而引起的能量損失。
(2)對于初始電池滿充、AER接近60km的PSHEV,根據優化后的控制策略,在NEDC行駛循環下,車輛行駛里程達到 100km時,兩種模式下發動機運行時間可分別減少49.4%和46.1%;UDDS運轉循環工況下,發動機運行時間則可分別減少 56%和52.8%,有利于節省燃油,減少能量損失。
(3)對于初始電量未滿的PSHEV,按同樣的方法進行優化發動機的起停控制策略,亦可獲得相近的節能效果。該方法也可用于增程型電動車輔助動力系統的控制。
[1] Karbowski Dom inik,Pagerit Sylvain,Kwon Jason.“Fair”Comparison of Powertrain Configurations for Plug-In Hybrid Operation Using Global Optimization[C].SAEPaper 2009-01-1334.
[2] Gonder J,Brooker A.Deriving In-Use PHEV Fuel Economy Predictions from Standardized Test CycleResults[C].Conference Paper,NREL/CP-540-46251,August 2009.
[3] Gonder J,Simpson A.Measuring and Reporting Fuel Economy of Plug-In Hybrid Electric Vehicles[C].Conference Paper,NREL/ CP-540-40377,November 2006.
[4] 邵強,董光宇,Massimo Onofri,等.串聯混合動力摩托車動力系統設計及仿真[J].小型內燃機與摩托車,2008,37(1):57-61.
[5] Elgowainy Amgad,Burnhum Anlrew,Wang Michael.Well-toWheels Energy Use and GreenhouseGas Emissionsof Plug-in Hybrid Electric Vehicles[C].SAE Paper 2009-01-1309.
[6] Richard“Barney”Carlson,Henning Lohse-Busch,Michael Duoba.Drive Cyc le Fuel Consumption Variabilityof Plug-In Hybrid E-lectric Vehicles Due to Aggressive Driving[C].SAE Paper 2009 -01-1335.
[7] Elias Zgheib,Denis Clodic.CO2Emission and Energy Reduction Evaluations of Plug-in Hybrid Vehicles[C].SAE Paper 2009-01 -1324.
[8] Markel T,Simpson A.Plug-In Hybrid Electric Vehicle Energy Storage System Design[C].Conference Paper,NREL/CP-540-39614,May 2006.
[9] 孫永正.插電式串聯混合動力轎車動力匹配與控制策略研究[D].上海:同濟大學,2010.
[10] 中國汽車技術研究中心.QC/T 759—2006,汽車試驗用城市運轉循環[S].http://www.gb99.cn.
[11] Simpson A.Cost-Benefit Analysis of Plug-In Hybrid Electric Vehic le Technology[C].Conference Paper,NREL/CP-540-40485,November 2006.
[12] Koji Imai,Takashi Ashida,Yan Zhang.Theoretical Performance of EV Range Extender Compared with Plug-in Hybrid[J].Journal of Asian Electric Vehicles,2008,6(2).
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
汽車與新動力(2015年1期)2015-02-27 12:11:01
電測與儀表(2014年17期)2014-04-04 11:56:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
