并聯式混合動力汽車遺傳模糊控制策略的研究*
2011-02-27 08:34:52楊世春朱傳高
汽車工程 2011年2期
楊世春,朱傳高,高 瑩,李 君
(吉林大學,汽車動態模擬國家重點實驗室,長春 130022)
前言
混合動力汽車控制策略主要解決的問題是發動機和電機的轉矩分配以及對電池SOC的控制,以實現發動機和電機的有效工作,在保證車輛動力性的前提下,達到節能、環保的目的。近年來,模糊控制在混合動力汽車控制策略中得到廣泛應用[1-3],利用模糊控制器實現混合動力汽車的轉矩分配,取得良好的控制效果。但是由于缺乏知識采集的手段,沒有規范及合理的建立方式,模糊控制器的隸屬度函數和模糊控制規則的選取和優化通常尚須依賴于操作者或專家的經驗。
本文中設計了某混合動力汽車的模糊邏輯轉矩控制器,利用遺傳算法對該控制器進行優化,最后通過仿真驗證了優化結果的有效性。
1 模糊邏輯轉矩控制器設計
圖1為所研究的雙離合器單軸轉矩耦合并聯式混合動力總成結構圖,它包括:發動機、兩個離合器、電動機/發電機、自動變速器和動力電池組。其主要部件及參數如表 1所示。
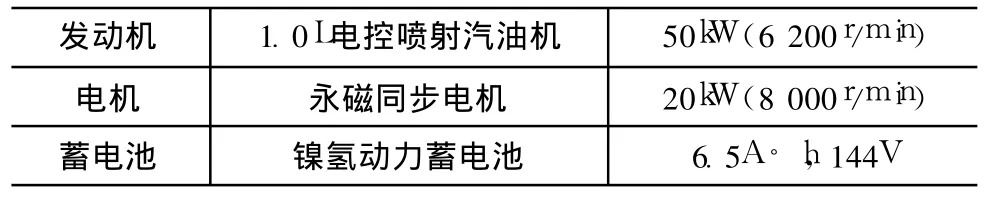
表1 系統主要部件及參數
1.1 模糊邏輯轉矩控制器設計
本文中研究的并聯混合動力總成主要動力來自發動機,電機為輔助動力。在設計控制策略時要盡可能使發動機在最優曲線上運行,只有當電機輸出轉矩及電池SOC不足或過高而不能滿足整車需求轉矩時,發動機才偏離最優曲線運行,同時盡可能使電機高效工作,電池SOC在合理區間內變化。
根據上述設計目標和發動機效率的高低,確定模糊轉矩控制器的輸入變量為:整車需求轉矩 Tr與當前車速下發動機最佳效率轉矩Te_opt的比值p和動力電池的SOC,而模糊轉矩控制器的輸出變量為發動機的轉矩系數r。發動機的轉矩輸出按下式確定: Te=r×Te_opt。然后對由模糊控制器得到的發動機輸出轉矩進行調整,Te<Te_min時,Te=0,Tm=Tr; Te>Te_max時,Te=Te_max,Te+Tm=Tr,其中Te_opt、Te_max和 Te_min分別為發動機最佳效率轉矩、最大轉矩和關閉轉矩。
模糊轉矩控制器框圖如圖 2所示,通過轉矩識別確定駕駛員的需求轉矩,與SOC同為輸入,經模糊控制器后,再由轉矩調整分別得到發動機轉矩和電機轉矩。
1.2 模糊規則的選取
為使模糊邏輯轉矩控制器能覆蓋所有的工況,混合動力汽車需要有多種運行模式,因而將整車需求轉矩 Tr與當前車速下發動機的最優曲線轉矩Te_opt的比值p,分成5個模糊子集:NB、NS、OK、PS、PB,其論域確定為[-1.5,1.6]。根據SOC的范圍把它也分成5個模糊子集:z1、z2、z3、z4、z5,其論域為[0,1]。發動機的轉矩系數 r也分為 5個模糊子集:A1、A2、A3、A4、A5,共論域為[0,1.6]。p、SOC和r值各個隸屬度函數[3-4]如圖 3所示,輸入語言變量和輸出語言變量采用梯形和三角形的隸屬度函數。
在模糊推理中,與(AND)運算采用取小,蘊涵運算采用Mamdani方法,結論合成采用累加法,非模糊化則采用面積重心法,建立相應的隸屬函數和模糊規則。
2 遺傳算法優化模糊控制器
由于模糊控制器本身的特點,基于專家經驗建立的模糊控制隸屬函數不能實現其最優的控制,因此利用遺傳算法,對前面設計的混合動力汽車模糊控制器的隸屬函數進行優化[5]。
并聯式混合動力參數優化是一個典型的非線性約束優化問題,可表述為
其中優化目標函數f(x)為混合動力系統的油耗和排放,約束條件gi(x)為一組非線性不等式,表示車輛的動力性能指標。優化設計變量為混合動力轉矩分配控制器的控制參數,其上下限為]。
2.1 初始種群生成
圖 4為模糊變量的模糊劃分和各模糊子集的隸屬度函數[6],用 x1、x2、x3、x4、x5、x6、x7表示隸屬函數各個劃分點。因為輸入輸出量的模糊隸屬函數都要進行編碼,所以由此生成一個長度為 21的一維十進制矩陣x1~x7,x8~x14,x15~x21,依次表示對p、SOC和r的隸屬函數劃分點。
初始種群由n個染色體組成,每個染色體的各位數字都是 0或 1的二進制數,在對模糊函數定義時,每一個劃分點為十進制數,考慮編碼精度,使每一個變量的編碼精度不大于 0.1,定義每個十進制數用 5位二進制數來表示。這樣每個染色體的長度就是21×5=105。
在運算過程中,須將生成初始群體轉換為模糊控制器可識別的數據,即將二進制數轉換為十進制數。由于每位的二進制數隨機生成,在轉換成為十進數 x1~x7,x8~x14,x15~x21時,不能保證 x1到 x7是增序排列。所以在完成十進制轉換后,應對生成的數字串進行再排序。x1~x7、x8~x14、x15~x21分別表示不同輸入、輸出變量隸屬函數的劃分點,由于各變量論域不同,所以在進行十進制轉換時對不同變量分別進行轉換。
2.2 適應度函數
選取控制系統的目標函數作為原始適應度函數,而選取混合動力汽車整個循環的油耗和排放為目標函數值[7-8],分別以不同的權重來表示優化目標,建立目標函數為
式中:x為每一個染色體所對應的序號;FC、HC、NOx、CO分別為發動機油耗和排放值;w1、w2、w3、w4分別為FC、HC、NOx、CO的權重值分別為各個參數所要優化的目標值;TDC為整個駕駛循環時間。用積分計算整個駕駛循環下的各目標值。
為使遺傳算法能夠用來優化模糊控制隸屬函數,須確定遺傳操作中的適應度函數。由式(2)可以看出,目標函數值越小,表明結果越接近最優。但在遺傳算法選擇操作中,適應度值越大的個體越有機會遺傳到下一代。在此,對目標函數值進行排序,通過遺傳工具箱ranking函數將每個目標函數值分配到適應度函數,以使最小的目標函數值對應到最大的適應度函數值。
2.3 運行參數設定
遺傳算法中需要選擇的運行參數主要有個體編碼串長度l、群體大小M、交叉概率 Pc、變異概率Pm和終止代數n等,如表2所示。

表2 運行參數
2.4 約束條件
(1)SOC值的約束
在進行適應度值計算時,如果以混合動力系統的經濟性作為優化目標,適應度函數中只包含油耗參數一項。油耗在動力系統整個循環完成后計算。如果不對電池的SOC值進行約束,優化結果很容易出現SOC值在循環結束后為0的情況。
在此,對SOC在循環開始和結束的差值ΔSOC進行限制,使ΔSOC≤0.03。
(2)模糊控制器約束
在完成十進制轉換后,x1~x7、x8~x14和 x15~x21中的最大值不得大于所對應變量論域的最大值,其最小值不得小于所對應變量論域的最小值。
(3)動力性約束
表3為動力性約束條件,其中Δtrace為仿真過程中,實際車速與測試循環要求車速的差值。

表3 動力性能約束條件
3 仿真結果分析
3.1 NEDC循環下以經濟性為目標的優化
僅以經濟性能為優化目標時,將式(2)中的權重值 w1定義為 1,其余都取 0。確定遺傳算法運行參數后,在Matlab/Simulink環境下進行仿真計算。
圖5為遺傳算法優化過程目標函數值的收斂曲線,由此確定了在第 80代中最優結果,并確定了優化后的模糊隸屬函數,如圖 6所示。
將優化后的結果重新在ADVISOR中進行仿真計算,得出并聯式混合動力系統各工作參數的圖表,并與優化前的情況進行比較,如圖 7~圖 10所示。由圖7(a)和圖7(b)中可以看出,優化前后SOC值在整個循環過程中變動不超過±0.005,滿足對SOC控制的要求。由圖8(a)、圖8(b)和圖9(a)、圖9 (b)中可以看出,電動機的工作效率有提高,發動機工作點明顯向所設定的發動機工作最優化曲線(圖10)靠近。表 4為模糊控制策略與遺傳算法優化仿真結果。由表 4可知,在利用遺傳算法經濟性優化后,并聯式混合動力系統的油耗可降低 4.57%,動力性基本沒有變化,但CO和NOx的排放都有提高。

表4 仿真結果對比
3.2 多目標優化結果分析
根據式(2),兼顧經濟性和排放性,設定權重為w1=w2=w3=w4=0.25,在NEDC循環下,利用遺傳算法進行優化。
確定適應度函數后,根據上述確定遺傳算法運行參數,在Matlab/Simulink環境下進行仿真計算。
圖11為遺傳算法優化過程目標函數值的收斂曲線,優化后的模糊隸屬函數如圖 12所示。
將優化后的結果重新在ADVISOR中進行仿真計算,得出并聯式混合動力系統各工作參數的圖表,并與優化前的情況進行比較,如圖7~圖9所示。由圖7(a)和圖7(c)中可以看出,優化前后SOC初值和終值變動不大,滿足控制要求。由圖 8(a)、圖8(c)和圖9(a)、圖9(c)可見,發動機工作點在低轉速下明顯下移,移向燃油效率較高的區域。同時,對照NEDC測試循環和SOC曲線,在低速時,發動機關閉,完全由電機來驅動車輛,在中低速時,發動機驅動車輛,工作點趨近于最佳轉矩曲線,并且多余轉矩向電池充電。在加速和高速工況時,發動機和電機同時驅動車輛。
由表 4可知,在利用遺傳算法多目標優化后,并聯式混合動力系統的動力性略有降低,油耗降低3.65%,排放參數中HC、CO和NOx都有明顯降低。
4 結論
(1)設計了雙離合器單軸轉矩耦合并聯混合動力汽車轉矩分配模糊控制策略,針對建立在專家經驗基礎上的模糊控制不能實現最優控制的問題,采用遺傳算法實現轉矩分配模糊控制器的優化。
(2)在NEDC循環下,應用遺傳算法,在只考慮經濟性條件下對模糊控制策略進行優化,油耗可以降低4.57%,但CO和NOx的排放都有提高。
(3)在NEDC循環下,應用遺傳算法,綜合考慮經濟性和排放性能的多目標控制策略優化,油耗可以降低3.65%,同時可以實現排放的降低。
[1] Lin Chan-Chiao,Peng Huei,Grizzle JW.Power Management Strategy for a Parallel Hybrid Electric Truck[C].Proceedings of the 2002 Mediterranean Control Conference,Lisbon,Portugal, July,2002.
[2] 彭棟,殷承良,張建武.基于模糊控制的并聯式混合動力汽車制動控制系統[J].吉林大學學報(工學版),2007(4):756-761.
[3] Schouten Niels J,Salman Mutasim A,Kheir Naim A.Energy Management Strategies for Parallel Hybrid Vehicles Using Fuzzy Logic[J].Control Engineering Practice,2003(11):171-177.
[4] 童毅,張俊智,歐陽明高.混合動力汽車扭矩管理策略[J].清華大學學報(自然科學版),2003(8):33-36.
[5] Jin Yaochu,et al.Neural Network Based Fuzzy Identification and Its Application to Modeling and Control of Complex Systems[J]. IEEE Trnas.On Systmes,Man,and Cybernetics,1995,26(6): 990-997.
[6] Goldberg D E.Genetic Algorithms in Search Optimization&Machine Learning.Reading[M].MA.Addison Wesley Publishing, 1989.
[7] Amir Poursamad,Morteza Montazeri.Deisgn of Genetic-fuzzy Control Strategy for Parallel Hybrid Electric Vehicles[J].ControlEngineering Practice,2008,16:861-873.
[8] Antonio Picclo,Lucio Ippolito,Vincen zo Galdi,etal.Optim ization of Energy Flow Management in Hybrid Electric Vehicles via Genetic Algorithms[C].2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics Proceedings 8-12, July 2001,Como,Italy.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
現代企業(2015年2期)2015-02-28 18:45:09
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年2期)2014-02-27 12:10:15
