非理想網絡環境下線性控制系統的穩定性分析
2011-01-29 09:39:00孔憲明鞠培軍馬曉燕劉國彩
泰山學院學報 2011年6期
孔憲明,鞠培軍,馬曉燕,張 衛,劉國彩,房 亮
(泰山學院數學與系統科學學院,山東泰安 271021)
近年來,網絡控制系統(NCS)的分析和設計問題引起了許多學者的廣泛研究.與通常的控制系統相比,NCS具有低成本、易于信息共享、易于維護和靈活性大等優點.但是,由于控制系統通過網絡進行連接,不同節點的實際距離可能非常遠,并且由于網絡的不可靠性以及未知干擾因素的影響,數據包在網絡中傳輸會不可避免的遇到時間延遲、丟包以及錯序等情況(稱為非理想網絡狀況),這些情況都會導致系統的性能下降甚至不穩定.目前,對于NCS的研究,大都是在理想網絡環境下討論的,或僅研究網絡時延和丟包[1-3],或僅研究信息受限等[4-6],對于一般的非理想網絡環境下NCS的研究還不多見[7].
本文將針對一類非理想網絡環境下線性控制系統,建立一種區間時滯系統模型,研究其穩定性分析問題,通過構造一個新的Lyapunov-Krasovskii泛函,從而得到一個更少保守性的穩定性判據.這種方法很容易推廣到反饋控制和H無窮控制的設計中.
1 問題描述
考慮控制系統狀態方程

其中,x(t)∈?n和u(t)∈?m分別是系統狀態和系統控制輸入,A和B0是具有恰當維數的常數矩陣.假設(A,B0)是可控的.系統通過網絡渠道連接,網絡控制系統結構如圖1.
假定系統采樣器是時針驅動,而零階保持器是事件驅動,采樣周期是一個正整數T.假設所有的狀態是可測的,數據傳輸是經過單包傳輸.其中,采樣序數是Si(i=1,2,3,…,∞),而零階保持器的接受序數為tk(k=1,2,3,…,∞).采樣值通過網絡渠道傳輸,且成功傳輸的信息將存放在緩存器中.緩存器的輸出信息為ˉx(tk),依據此信息可設計控制器.
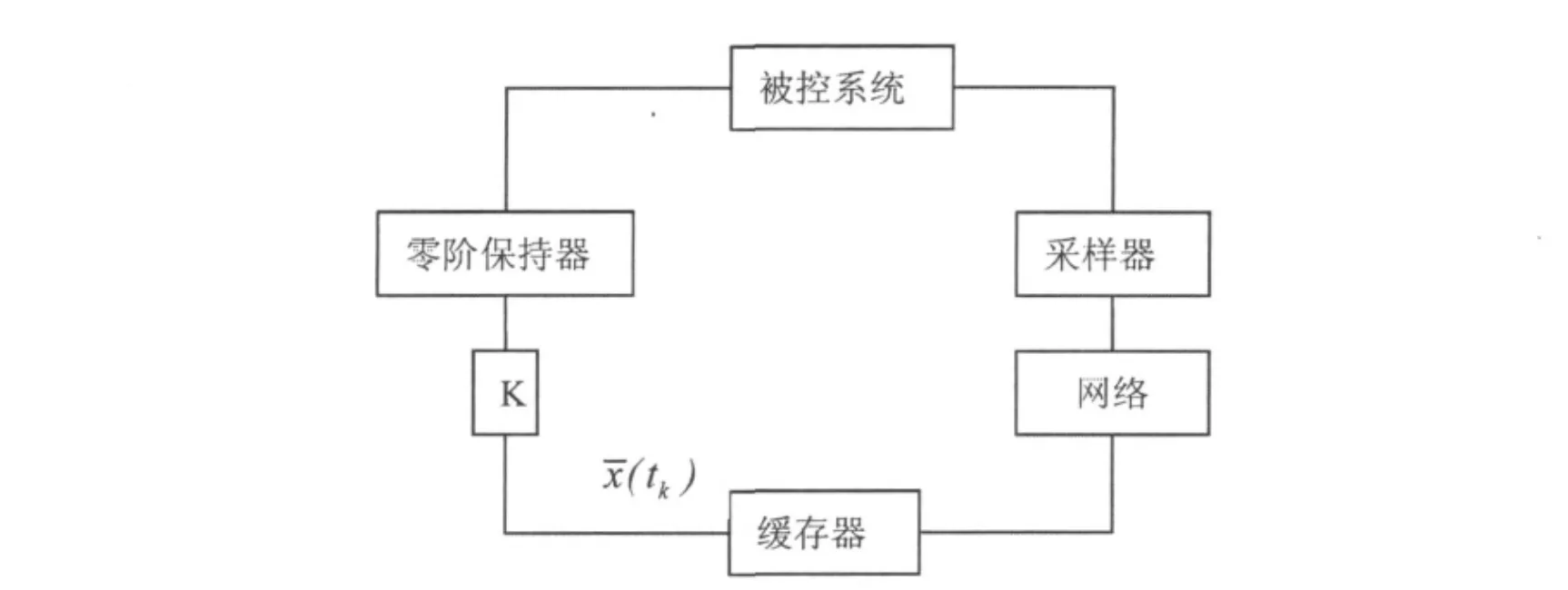
圖1 網絡控制系統結構圖
假設網絡控制系統傳輸時滯為τSCk,數據傳輸中的丟包數為d(k),則可得到ˉx(tk)=x(tk-τSCk),其中,tk=Si+τSCk,tk+1=Sj+τSCk+1(i,j∈(1,2,3,…,∞)).顯然,∪∞k=0[tk,tk+1)=[t0,∞),t0>0.在實際控制中傾向于采用那些新的信息,而把舊的數據包放棄.所以假設Sj>Si(i,j∈(1,2,3,…,∞)),同時考慮到零階保持器的作用,可得

令τ(t)=t-tk+τSCk,則τ(t)是分段線性函數,且t≠tk時,˙τ(t)=1.采取狀態反饋控制u(t)= Kˉx(t),其中,K為狀態反饋陣,則系統(1)可寫為

其中Φ(t)為系統(2)的初始條件,B=B0K,變時滯τ(t)滿足

至此,我們建立了一種非理想網絡環境下線性控制系統的區間時滯系統模型.下面將進行穩定性分析.首先給出如下引理,它將在主要結果的證明中起著重要作用.
引理1[8]對任意矩陣W∈?n×n,W=WT>0和一個標量γ>0,向量函數˙x∶[-γ,0]→?n使得下列不等式成立

2 穩定性新判據
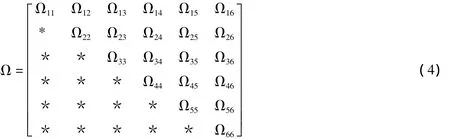
定理1 對于滿足條件(3)的系統(2),如果存在矩陣P>0,S1>0,S2>0,S3>0,S4>0和Q=,滿足下面的矩陣不等式(LMI),則系統(2)是漸近穩定的.
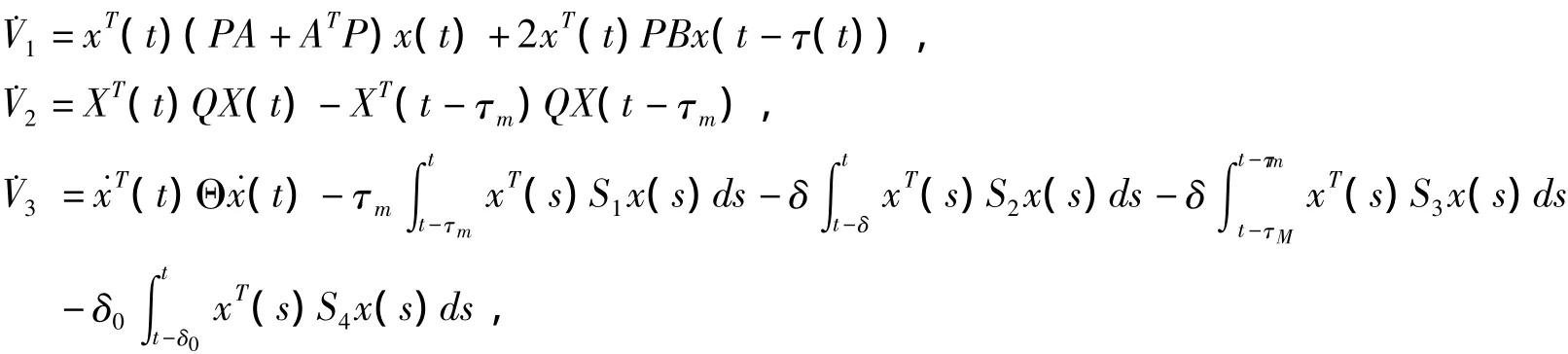
證明:構造Lyapunov-Krasovskii泛函

對V(xt)沿(2)求導得
由引理1得
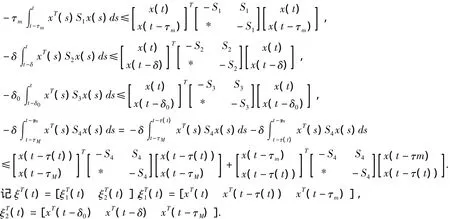
~A=[A B 0 0 0 0].由上得 ˙V≤ξT(t)Ωξ(t).若LMI(4)有解,則 ˙V≤-λξT(t)ξ(t)≤-λxT(t)x(t),其中λ=λmin(-Ω)>0.從而由Lyapunov-Krasokii穩定性定理知,滿足條件(3)的系統(2)是漸近穩定的.
3 數值算例
為了驗證所提出方法的優越性,假設網絡控制系統已轉化為系統(2),其中

當時滯導數信息未知時,利用定理1及MATLAB軟件中的LMI工具箱,可得到表1.從表格中看到,應用本文方法極大減少了結果的保守性.

表1 保證系統穩定的時滯區間
4 結論
本文針對一類非理想網絡環境下的線性控制系統,建立了一個區間時滯線性系統模型,通過構造一個新的Lyapunov-Krasovskii泛函,討論了系統的漸近穩定性問題,得到了一個基于LMI的穩定性判據.數值算例說明所得結論具有較小的保守性.
[1]郭戈,賈二娜.網絡化控制系統中的延時問題:分析與展望[J].控制與決策,2009,24(1):1-6.
[2]孫海燕,侯朝楨.具有數據包丟及多包傳輸的網絡控制系統穩定性[J].控制與決策,2005,20(5):511-515.
[3]岳東,彭晨,Han Qing-Long.網絡控制系統的分析與綜合[M].北京:科學出版社,2007.
[4]Liberzon D.On stabilization of linear systemswith limited information[J].IEEE Trans on Automatic Control,2003,48(2):304-307.
[5]Liberzon D.Quantization,time delay and nonlinear stabilization[J].IEEE Trans on Automatic Control,2006,51(7):1190-1195.
[6]Fu M Y,Xie L H.The sector bound approach to quantized feedback control[J].IEEE Trans on Automatic Control,2005,46(11): 1698-1711.
[7]彭晨,田恩剛.一種改進的具有非理想網絡狀況的網絡控制系統分析與綜合方法[J].自動化學報,2010,36(1):188-192.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
