一種應用磁強計提高導航系統航向精度的方法*
2010-12-07 06:04:28吳美平王荔斌
傳感器與微系統 2010年8期
管 斌,李 濤,吳美平,王荔斌
(1.國防科技大學機電工程與自動化學院,湖南長沙410073;2.中國人民解放軍63999部隊,北京100094)
0 引言
低成本SINS/GPS組合導航系統具有體積小、成本低等優點,可以應用于智能炮彈、制導炸彈、無人飛機、機器人等多種場合[1]。文獻[2]通過理論分析與仿真實驗說明了SINS/GPS組合導航系統中航向角誤差的可觀測性較差,當載體處于靜止或勻速運動狀態時,系統航向角誤差無法有效收斂。文獻[3]通過分段線性定常系統可觀測性分析理論對15維狀態的SINS/GPS組合導航濾波模型進行了可觀測分析,結果表明:靜止狀態下航向角誤差不可觀測。
文獻[4]提出了一種通過磁強計計算航向角并將之加入至系統的觀測量中,與三維位置觀測量構成系統四維觀測量,從而構成MIMU/GPS/磁強計組合系統的方法,并通過可觀測性分析說明了將磁強計加入至系統后系統的所有狀態完全可觀測。
本文采用磁強計與低成本SINS/GPS構成新的組合導航系統,利用SINS/GPS組合提供的水平姿態角與磁強計觀測量,采用磁羅盤原理計算得到航向角,并作為組合導航系統新的觀測量,以此改善航向角的可觀測性,從而提高組合導航系統的航向精度。首先建立了系統完整的濾波模型,通過多組仿真實驗對2種組合系統進行了對比,最后通過靜態實驗驗證了本方法的有效性。
1 組合導航系統模型
1.1 捷聯導航系統誤差模型
在低成本系統的前提條件下,對文獻[5]中所述捷聯導航系統誤差模型進行簡化,得到姿態誤差角方程

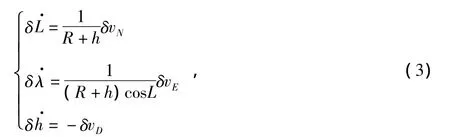
速度誤差方程

位置誤差方程
1.2 磁航向角的計算
通過SINS/GPS組合得到載體的橫滾角φ和俯仰角θ,利用磁強計的測量信息[X Y Z]可以得到地球的磁場水平分量Xh與,如式(4)所示

航向角可根據式(5)得到
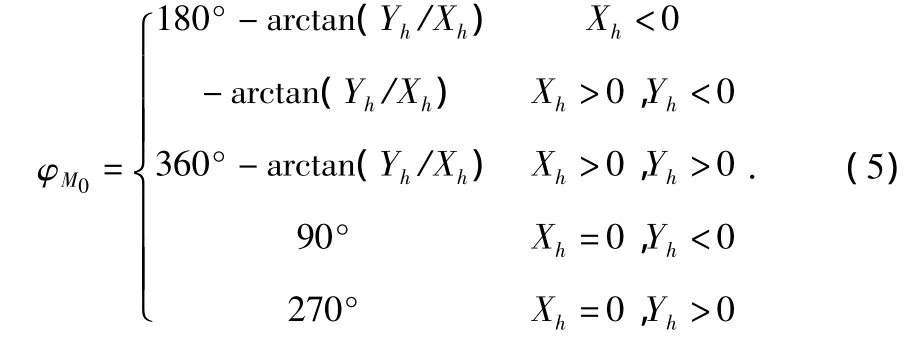
其中,φM0為磁航向角,經過磁偏角的修正后可以得到載體的航向角φM。
1.3 SINS/GPS組合濾波模型

選取量測向量為
由式(1)~式(3)與式(6)可以得到SINS/GPS組合濾波模型[7]

式中 W為6維狀態噪聲,由陀螺和加速度計噪聲構成;V為6維觀測噪聲,由GPS觀測噪聲構成

1.4 SINS/GPS/磁強計組合濾波模型
將SINS解算得到的航向角φI與磁羅盤所得航向角φM之差增加為濾波器的一維觀測量,即令量測向量為
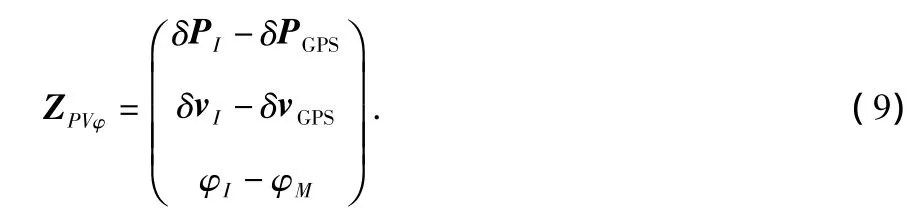
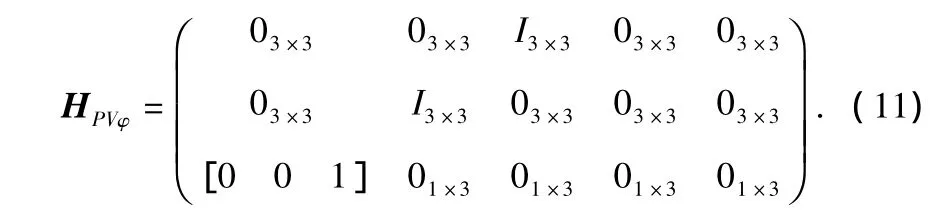
由式(1)~式(3)與式(9)可以得到SINS/GPS/磁強計組合濾波模型

式中 狀態方程與模型(7)中狀態方程一致,且
2 仿真實驗分析
為了分析SINS/GPS組合系統的航向角誤差觀測時存在的相關問題,并驗證SINS/GPS/磁強計組合系統的有效性,在Simulink中對靜止與勻速運動狀態、正弦機動狀態和正弦機動轉勻速運動狀態下的2種組合系統進行了系統仿真和比較分析,仿真參數如表1所示。
2.1 靜止與勻速運動狀態系統仿真
對靜止與勻速運動狀態下的SINS/GPS組合系統與SINS/GPS/磁強計組合系統進行仿真比較,系統姿態角誤差曲線如圖1所示(2種條件下結果一致,圖中虛線代表SINS/GPS組合系統,實線代表SINS/GPS/磁強計組合系統,下同)。
由圖可得,靜止與勻速運動狀態下2種組合系統的水平姿態角誤差收斂效果一致,而SINS/GPS組合系統航向角誤差不可收斂,與文獻[2,3]中相關結論一致,SINS/GPS/磁強計組合系統的航向角誤差可收斂至較小范圍。仿真結果表明:在上述運動狀態下,將磁強計加入SINS/GPS組合系統后,系統的航向角誤差由不可收斂轉為可有效收斂,說明了該方法的可行性。
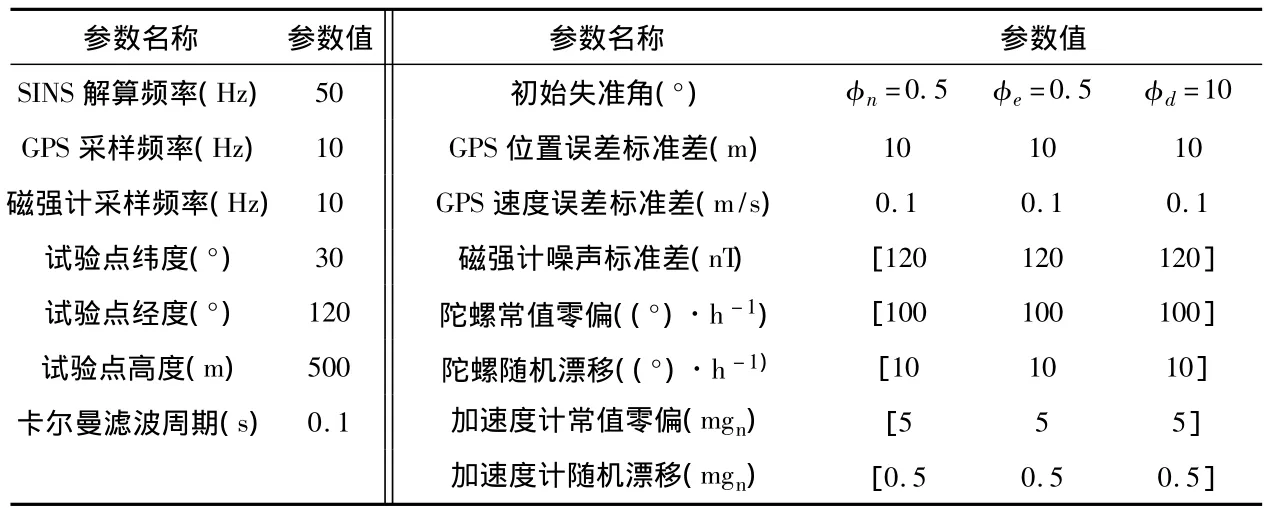
表1 仿真實驗參數設定表Tab 1 Experiment parameters sheet of simulation
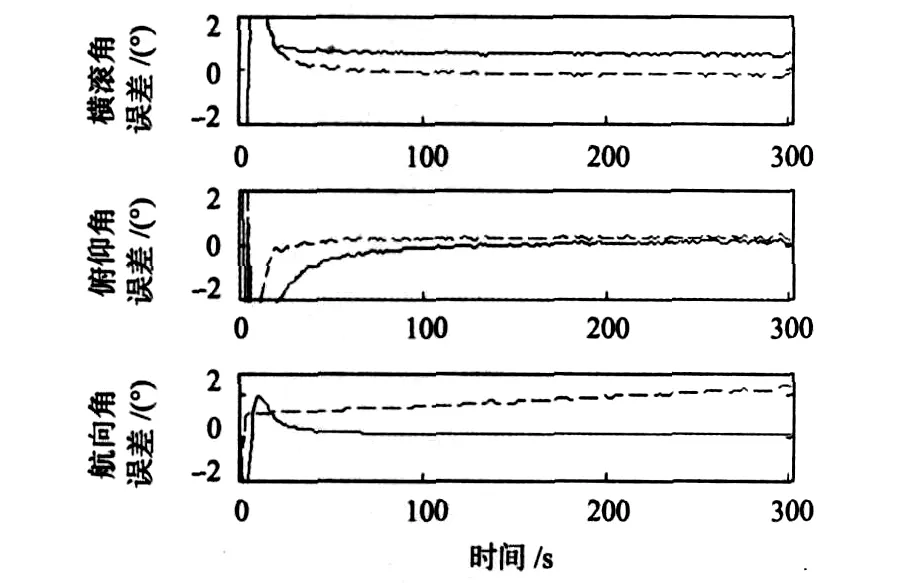
圖1 靜止狀態姿態角誤差曲線Fig 1 Attitude angle error curve under stationary state
2.2 正弦機動狀態系統仿真
在正弦機動狀態下,對2種組合系統進行仿真比較,系統姿態角誤差曲線如圖2所示。由圖可得,在正弦機動狀態下SINS/GPS組合系統的航向角誤差可收斂,與文獻[8,9]相關結論一致,其收斂效果與機動的效果相關,本組實驗中航向角誤差在270s時收斂至1°以內;SINS/GPS/磁強計組合系統的航向角誤差收斂效果在正弦機動狀態下與靜止狀態下一致。仿真結果進一步說明了SINS/GPS組合系統在機動條件下姿態角誤差可觀測,而在靜止狀態與勻速運動狀態下不可觀測的問題,說明了SINS/GPS/磁強計組合系統的有效性。
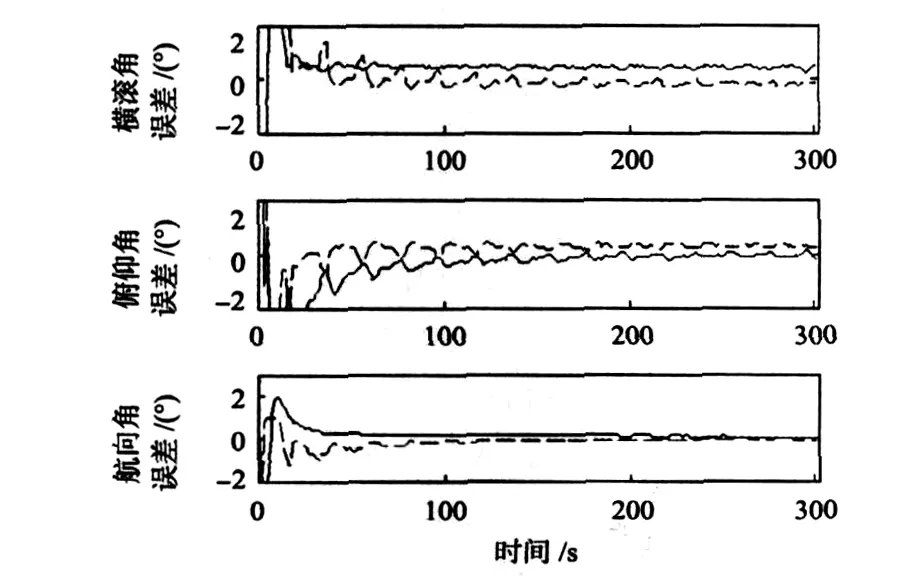
圖2 正弦機動狀態姿態角誤差曲線Fig 2 Attitude angle error curve under sinusoidal movement
2.3 正弦機動轉勻速運動系統仿真
為了分析真實運動條件下SINS/GPS/磁強計組合系統的有效性,本文設計了600 s時長的仿真實驗,載體首先做正弦機動300s,然后勻速運動300s,此運動狀態下的姿態角誤差曲線如圖3所示。
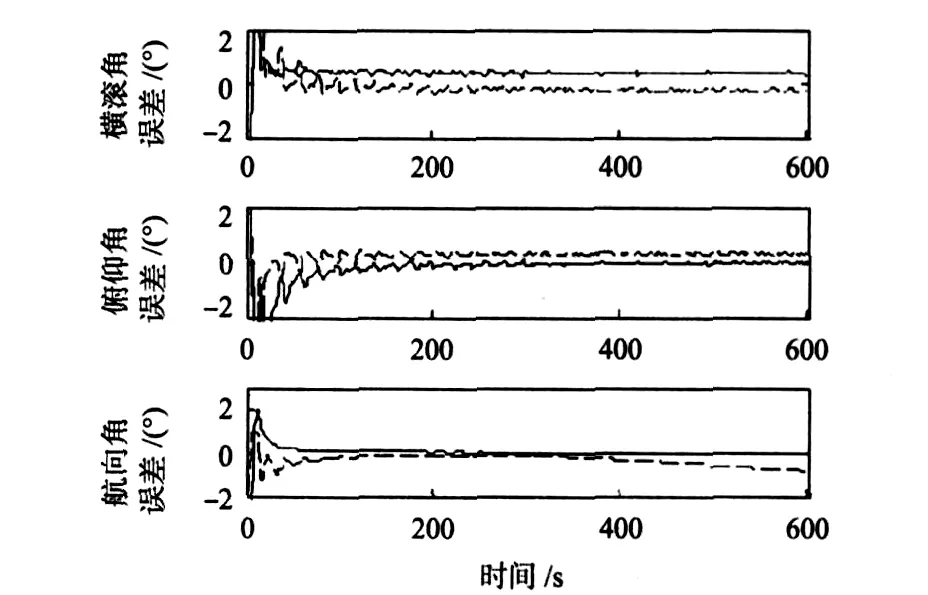
圖3 正弦機動轉勻速運動時的姿態角誤差曲線Fig 3 Attitude angle error curve under sinusoidal mobile state turned to uniform motion
由圖可得,對SINS/GPS組合系統,機動300 s結束時的航向角誤差收斂至較小值,而當載體開始做勻速運動時,航向角誤差開始增大,勻速運動300 s的過程中,系統航向角誤差由1°變為8°;而對SINS/GPS/磁強計組合系統,系統的航向角誤差始終收斂在0°附近。
仿真結果表明:對于SINS/GPS組合系統,大機動條件下系統的航向角誤差可以收斂至小角度,當系統重新開始做勻速運動后,航向角誤差開始發散;而SINS/GPS/磁強計組合系統姿態角誤差一直收斂在較小角度;本實驗說明了,將磁強計應用于低成本SINS/GPS組合系統能夠提高系統航向角精度。
3 靜態實驗分析
為了進一步驗證本文所提方法在實際應用中的有效性,在仿真試驗的基礎上,利用某型系統進行靜態實驗,該系統所用器件的性能指標如表2所示。
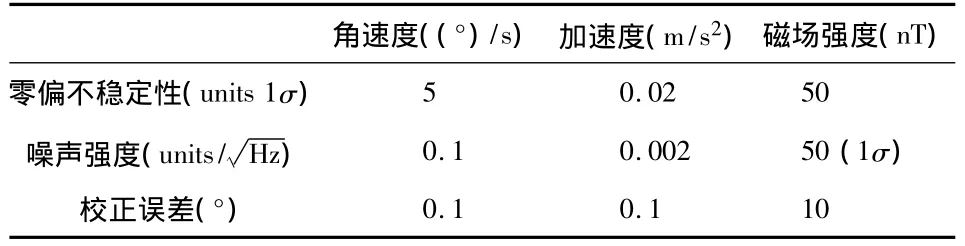
表2 系統性能指標Tab 2 System property index
實驗方案:在有GPS信號的空曠環境下,將系統固定在穩定的平臺上,系統上電并進行相關測試,確保 MIMU/GPS/磁強計輸出數據有效,待系統捕獲到足夠的GPS信號后開始記錄數據,采集數據10 min后系統下電。
利用所記錄數據進行離線處理,通過模型式(10)解算得到的姿態角誤差曲線如圖4所示。由圖可得,2種組合系統的水平姿態角誤差收斂效果一致,而SINS/GPS組合系統的航向角誤差發散,SINS/GPS/磁強計組合系統的航向角誤差有效收斂。該靜態實驗驗證了2.1節所做仿真實驗的正確性,說明了本文所提出應用磁強計提高低成本SINS/GPS組合導航系統航向精度方法的有效性。實驗結果表明:各狀態均收斂時姿態角誤差標準差為[0.064 6°0.0577°0.1955°]。
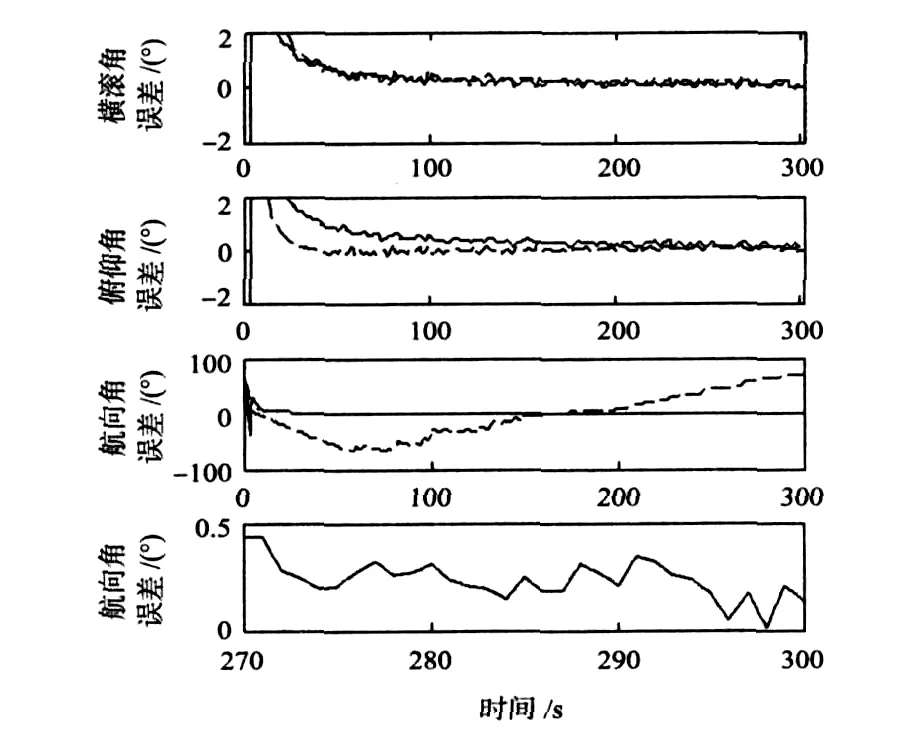
圖4 靜止狀態姿態角誤差曲線Fig 4 Attitude error under static state
4 結論
本文提出了一種應用磁強計提高低成本SINS/GPS組合導航系統航向精度的方法。給出了詳細的系統濾波模型的同時,對低成本設備參數條件下的SINS/GPS組合導航系統與SINS/GPS/磁強計組合導航系統進行了數字仿真實驗,仿真實驗表明:由于慣性器件精度較低,在靜止與勻速運動狀態下,SINS/GPS組合導航系統航向角誤差發散,而SINS/GPS/磁強計組合導航系統的航向角有效收斂。利用某型系統對本文方法在實際應用中有效性進行了驗證,靜態實驗表明:在傳感器精度較差的條件下,系統航向角誤差仍可以有效收斂;長時間實驗表明:系統收斂時的姿態角誤差和誤差的標準差均較小,說明了應用磁強計能夠提高低成本SINS/GPS組合導航系統航向精度。
[1]祝燕華,蔡體菁,楊卓鵬.MEMS-IMU/GPS組合導航系統的實現[J].中國慣性技術學報,2009,17(5):552-561.
[2]李淵濤,陳 哲,劉 劍.SINS/GPS組合系統姿態角誤差可觀測性研究[J].北京航空航天大學學報,1999,25(3):367-370.
[3]孔星煒,郭美鳳,董景新.MINS/GPS組合導航系統車載試驗誤差特性分析[J].中國慣性技術學報,2009,17(3):297-301.
[4]Laurent Wenger,Demoz Gebre Egziabher.System concepts and performance analysis of multi-sensor navigation systems for UAV applications[C]∥Proceedings of 2nd AIAA Unmanned Unlimited Systems,Technologies,and Operations.AIAA:San Diego,California,2003.
[5]Titterton D H,Weston JL.Strapdown inertial navigantion technology[M].Second Edition.Lexington,Massachusetts,USA:American Institute of Aeronautics and Astronautics,Inc,2004.
[6]Caruso M J.Applications of magnetic sensors for low cost compass systems[C]∥Proceedings of 2000 IEEE Position Location and Navigation Symposium.San Diego,California,2000.
[7]秦永元,張洪鉞,汪叔華.卡爾曼濾波與組合導航原理[M].西安:西北工業大學出版社,1998.
[8]劉 準,陳 哲.局部可觀測理論在INS/GPS機動對準中的應用[J].北京航空航天大學學報,2001,27(6):702-705.
[9]耿延睿,郭 偉,崔中興,等.GPS/SINS系統空中對準姿態角誤差可觀測性研究[J].中國慣性技術學報,2004,12(1):37-42.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
發明與創新(2016年38期)2016-08-22 03:02:52
