基于TMS320F2812的異步電機矢量控制系統
2010-09-21 06:09:42陳順中談龍成王秋良
大電機技術 2010年1期
陳順中,談龍成,王秋良
(中國科學院電工研究所,北京 100190)
基于TMS320F2812的異步電機矢量控制系統
陳順中,談龍成,王秋良
(中國科學院電工研究所,北京 100190)
傳統的矢量控制方法基于異步電機的穩態模型,控制性能受電機的參數影響很大。本文結合異步電機的特性和要求在控制策略中設計了轉速、電流、磁鏈等多個閉環,采用了對參數依賴性很小的偏差電壓解耦方式,并結合電機的電壓模型和電流模型對傳統的轉子磁鏈計算進行了補償和修正,有效地降低參數變化對系統的影響。DSP芯片TMS320F2812有著強大的運算能力和優良的控制性能,基于該芯片的硬件系統很好地實現了控制方案,實驗表明該控制系統精度高,實時性和動態響應都較好。
偏差電壓解耦;矢量控制;轉子磁鏈;TMS320F2812
1 引言
矢量控制的本質就是把交流電動機模擬成直流電動機來控制,通過坐標變換把定子電流矢量分解成轉矩分量和勵磁分量。由于兩個分量是解耦的,可以分別加以控制,從而能取得與直流電機相媲美的控制性能。但矢量控制算法中大量使用了電機參數,而在運行中電機參數變化很大(如轉子電阻最大變化可達50%),極大地影響了控制系統的性能。如何消除參數的變化對控制性能造成的影響成為矢量控制中的一個重要課題。
為了解決這一問題,很多學者在電機參數在線辨識方面做了大量的工作。文獻[1]~[4]介紹了幾種常見的電機參數在線辨識方法,主要有擴張卡爾曼濾波法(EKF)、模型參考自適應法(MRAC)、神經元網絡法(ANN)等等。但這些方法算法復雜,需要大量實時計算,而且很多都包含了微分運算環節,容易產生運算結果的“毛刺”現象。文獻[5]在控制環節中加入了相角閉環來補償由于參數變化引起的轉子磁鏈誤差,但其依據電機的電流模型,在低速時補償效果不佳。
本文根據閉環對參數變化具有抵抗作用,在控制策略中設計了轉速、電流、磁鏈等多個閉環,電壓解耦環節采用了對電機轉子參數依賴性很小的偏差解耦方式,并且結合了電機的電壓模型和電流模型對控制中的核心變量(轉子磁鏈)進行了補償和修正。繞過復雜的參數辨識環節,大大降低了電機參數變化對控制系統的影響。采用TI公司生產的DSP芯片TMS320F2812實現了該矢量控制系統的軟硬件設計,取得了較好的實驗結果。
2 轉子磁場直接定向矢量控制原理
矢量控制有定子磁場、氣隙磁場和轉子磁場3種磁場定向方式。這里采用轉子磁場定向,實現對定子電流的轉矩分量和勵磁分量的解耦。通過3/2變換和旋轉變換可以得到異步電機在以轉子磁鏈為d軸,與之垂直且超前π/2方向為q軸的旋轉坐標下的數學模型[6,7]:
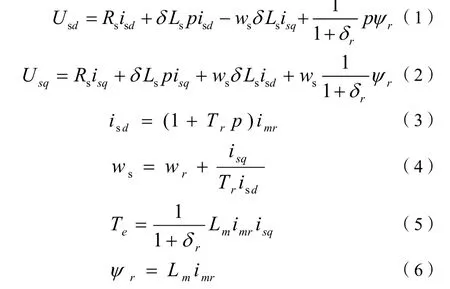
式中:L,R,w,ψ—— 電感、電阻、角速度和磁鏈;
下標s,r,m,d,q——定子、轉子,磁場量旋轉坐標系的d軸和q軸分量;
Tr,Te,p—— 轉子時間常數,電磁轉矩,微分算子;
δ——定子電感因數,δ=1-L2m/LrLs;
δr—— 轉子漏磁因數,δr=Lrl/Lm。
實際控制中引入PI調節器,繞開參數對電流進行有效控制。PI調節器具體算法如下:
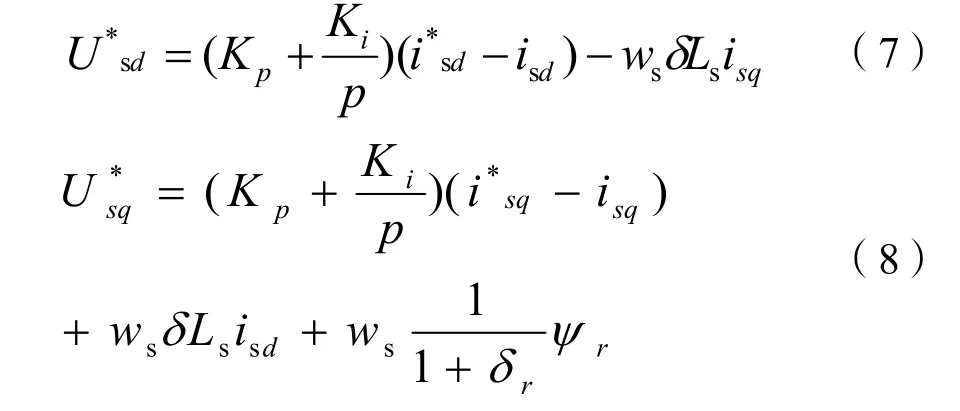
但從式(7)和式(8)可以看出,d 軸和q軸之間存在耦合。要消除交叉耦合量的影響必須對d、q軸電壓進行解耦。目前,學者共提出3種解耦方法:反饋解耦、前饋解耦、偏差解耦[8]。本文采用偏差解耦的方法,通過電流給定信號與反饋信號的差值進行PI調解以生成耦合量:

將PI調節引入到解耦電壓項的計算中,不僅保證了高速運行時系統跟隨給定變化的調節能力和快速響應給定的變化,更重要是在電機運行中,轉子電阻和轉子電感的變化非常大,偏差解耦避開了這兩個參數,增強了系統對電機參數變化的抵抗能力。
3 對轉子磁鏈計算與控制的改進
在矢量控制中,轉子磁鏈ψr和磁場定向角θs都是實際值,但這兩個量是難以直接測量的,只能采用觀測值或模型計算。傳統的觀測器所依據的電機模型方程為(4)~(6)。從式中可以看出,傳統的轉子磁鏈觀測器依賴于電機參數的正確性,受參數變化影響很大。為了解決這個問題很多學者在電機參數在線辨識方面進行了大量的研究工作。這里對傳統的轉子磁鏈計算和控制進行改進,提出一種新的轉子控制方法,從而繞過參數在線辨識,使系統在運行中不受參數變化的影響[9]。
如圖1所示,在理想電機模型中,令d軸與轉子磁鏈完全重合,此時有ψr=ψrd, ψrq=0,磁鏈和轉矩實現完全解耦。但實際運行中,由于電機參數的變化間接導致轉子磁鏈ψr偏離d軸,假設偏至d′軸,則與理想模型中的d 軸有一偏角△θ;磁鏈與轉矩之間存在耦合關系,無法通過定子電流中的磁鏈分量和轉矩分量實現分別獨立控制,若在控制系統中,強迫△θ為零,則非完全解耦問題便得以解決。由圖1可得:
可以解得:

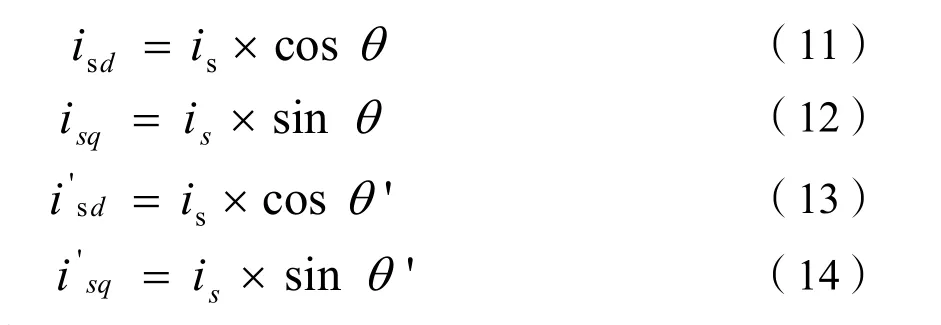
上面的變量中isd,isq可由傳統的坐標變換求得。sdi′,sqi′可通過實測的電流、電壓值在α-β坐標系中算得。電機在α-β坐標系中的數學模型可由下列方程表示:

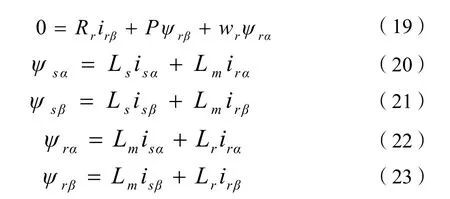
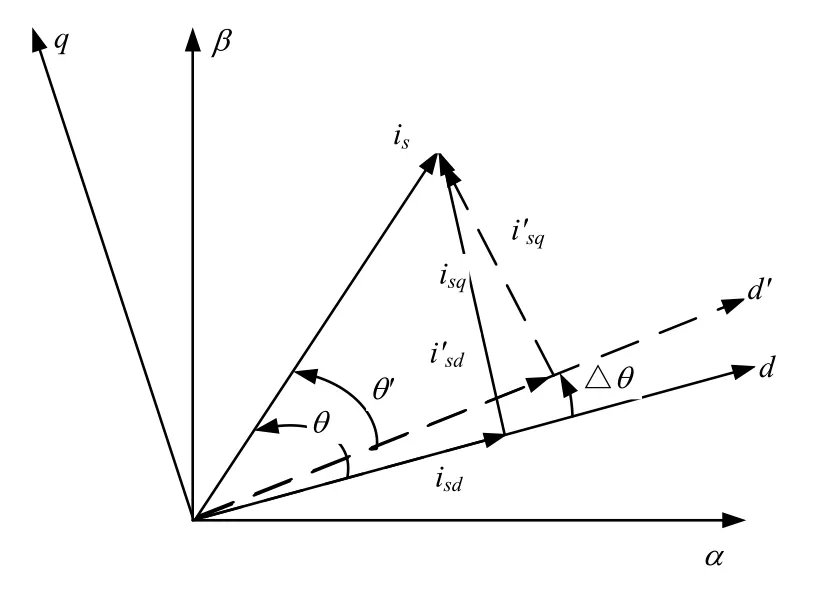
圖1 異步電機轉矩和磁鏈非完全解耦矢量圖
結合圖2的矢量坐標可推導出:
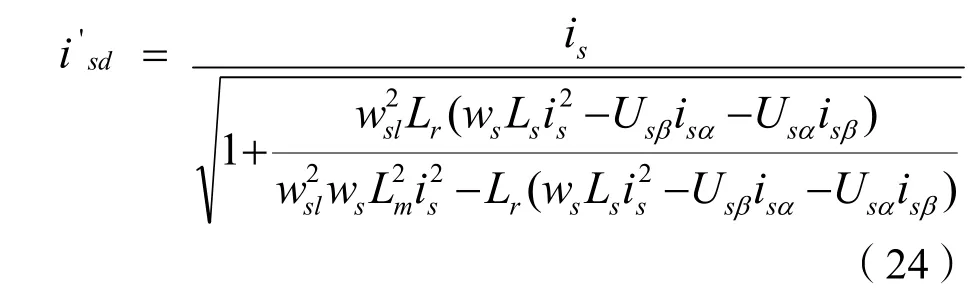
式中:is——定子電流的幅值;

則

通過上面方程計算出△θ,再經過一個調節器調節后將所得的值補償到ψr給定值上來對PWM逆變器的輸入電流進行調節,使△θ值等于0,從而使d’軸與理想模型中的d軸重合,實現磁鏈和轉矩完全解耦。
4 系統控制方案
偏差電壓解耦改進型矢量控制系統原理框圖如圖2所示。系統由一個速度閉環、一個磁鏈閉環、 兩個電流閉環組成。

圖2 偏差電壓解耦改進型矢量控制原理圖
5 控制系統的軟硬件設計
硬件設計中采用TI公司生產的高性能數字處理芯片(DSP)TMS320F2812,該芯片是在F240X的基礎上開發的32位定點處理器,主頻高達150MHz,具有強大的運算能力,完全能勝任本文控制方案中的復雜算法。芯片內置了兩個12位的A/D采樣模塊,共16個通道,為采集電機運行中的各種信號提供了方便。另外TMS320F2812還具有優良的控制能力,是一款用于電機數字控制的專用芯片,其最大特色在于內置了兩個功能強大的事件管理器,其完備的功能,使得TMS320F2812幾乎可以實現各種電機的控制[10]。圖3以TMS320F2812為核心的控制系統示意圖。
本文的矢量控制方案中包含大量復雜的數學運算,在編程時單用匯編語言來實現不僅麻煩、容易出錯,而且程序的可讀性和可移植性也較差,這將延長系統的開發時間并且不利于系統的維護。TMS320F2812提供了C/C++語言編譯器,可用C語言進行DSP系統的開發,大大提高了開發的效率。本系統中DSP控制軟件采用C語言和匯編語言混合編程的方式,匯編語言程序主要完成定時器控制、A/D采樣、測速等工作,C語言程序主要完成矢量控制算法、SVPWM控制算法。主程序流程圖如圖4所示、圖5為定時器下溢中斷子程序。
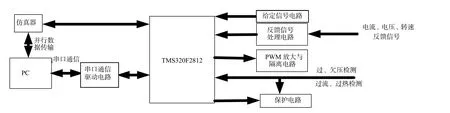
圖3 控制系統硬件示意圖
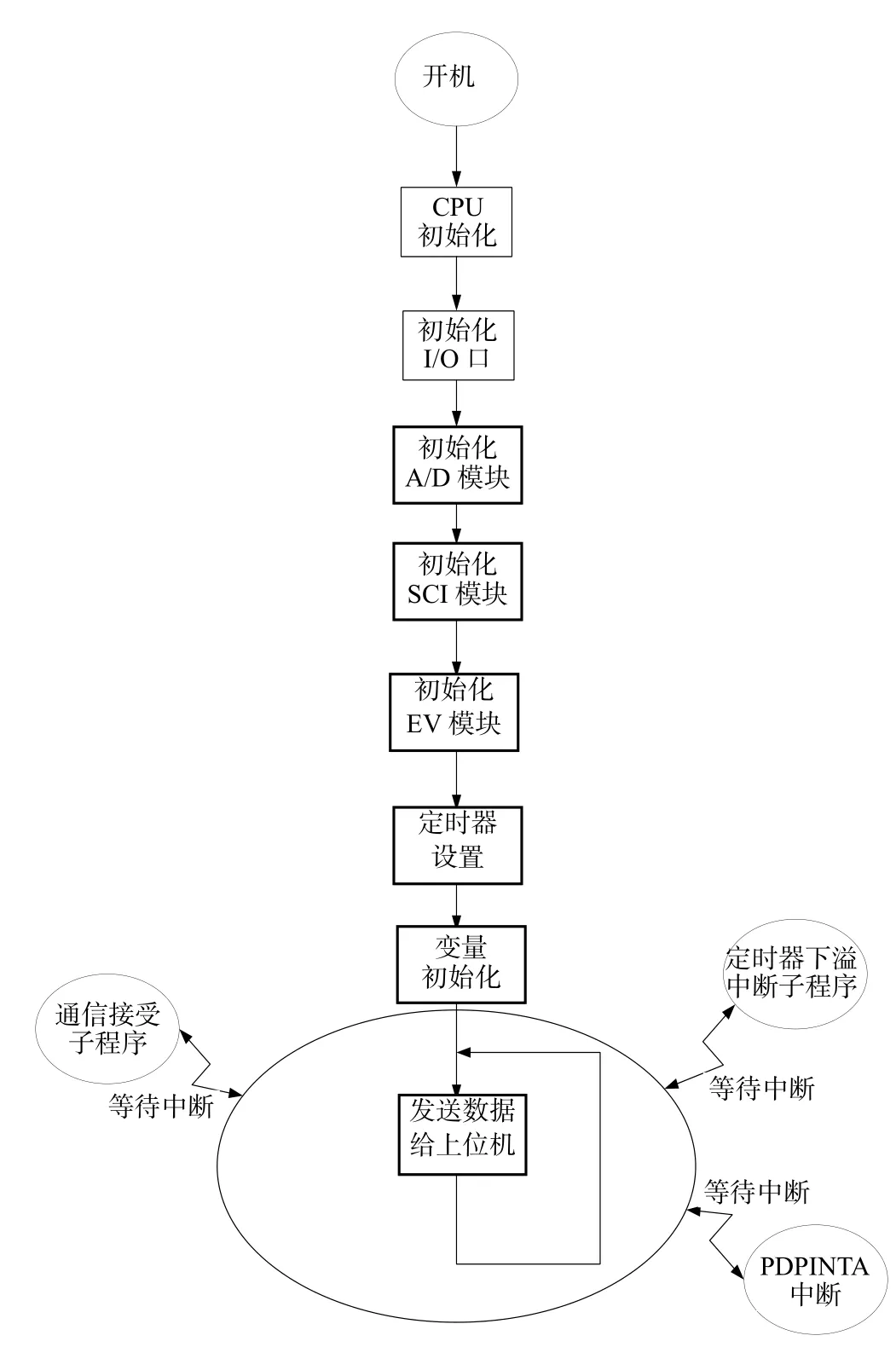
圖4 主程序流程圖
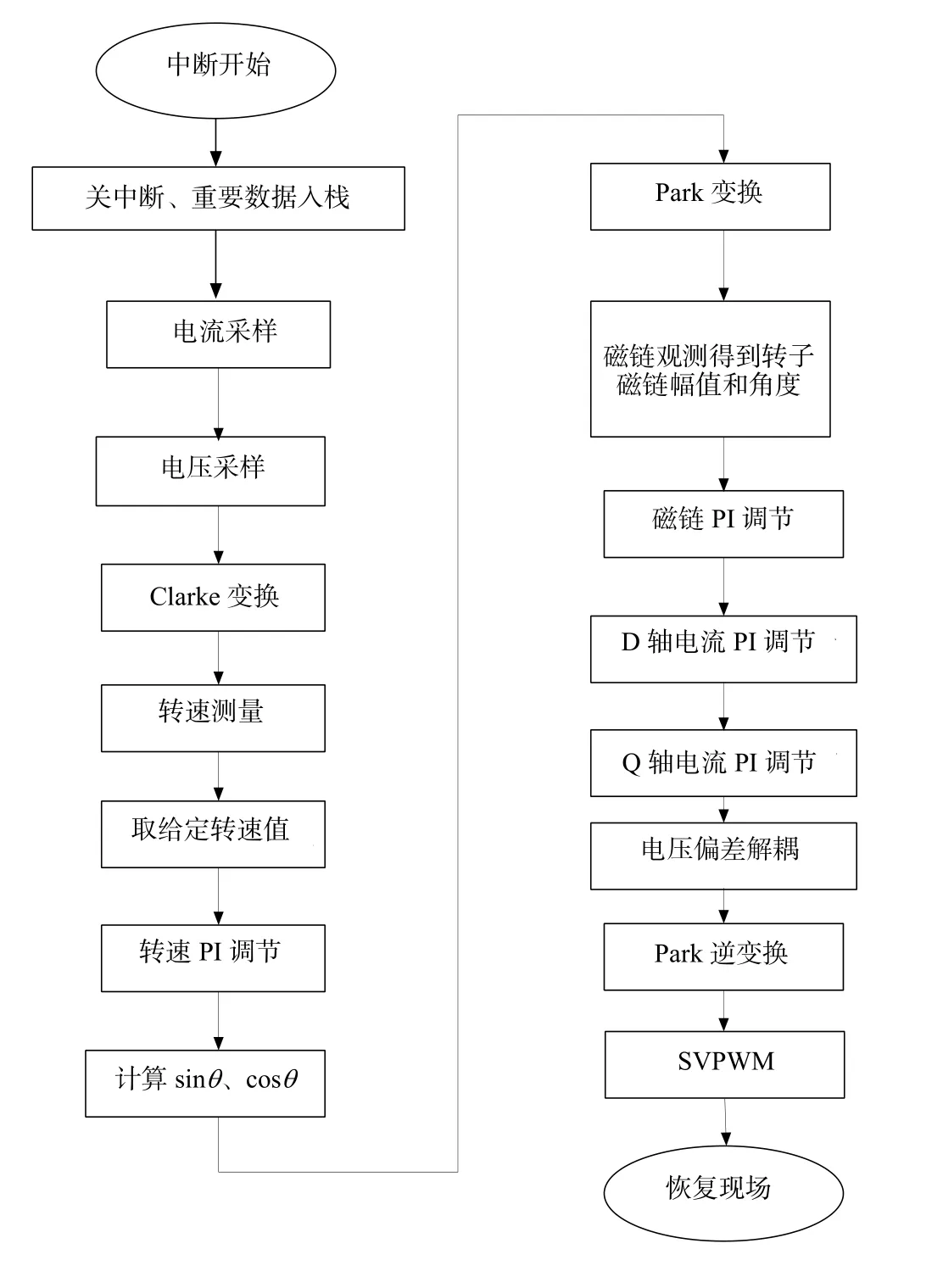
圖5 定時器下溢中斷子程序
6 實驗結果
在實驗系統平臺上對本文設計的矢量控制方案進行了實驗驗證。實驗中使用的異步交流電機參數為:額定電壓Urms=460V,irms=375A,額定頻率fn=50Hz,定子電阻Rs=0.015Ω,轉子電阻Rr=0.01Ω,定子電感Ls=53.25mH,轉子電感Lr=42.1mH,互感Lm=38.0mH,磁極對數P=1。實驗結果見圖8~圖10。
從圖6~8中可以看出,電機啟動過程中轉矩很快達到最大值,然后幾乎保持恒定,說明電機控制中實現了恒轉矩啟動,而且轉子磁鏈很快建立然后保持恒定,說明控制方案中很好實現了轉矩分量和勵磁分量的解耦。電機轉速在啟動過程中的超調量和波動都很小。圖9說明電機的轉速調節具有很好的動態響應性能。從圖10可以看出,電機在帶載穩態運行時,電壓和電流波形較為理想,波形中的“毛刺”和畸變都很小,控制系統具有很好的穩態性能。

圖6 電機起動過程中的轉速波形

圖7 電機起動過程中的轉矩波形

圖8 電機起動過程中的轉子磁鏈波形
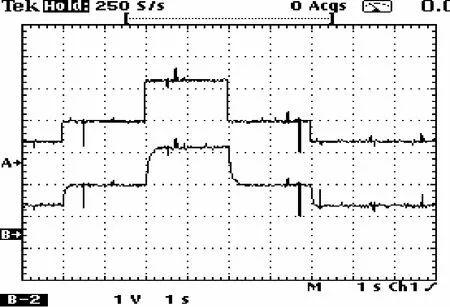
圖9 電機轉速隨給定速度響應波形
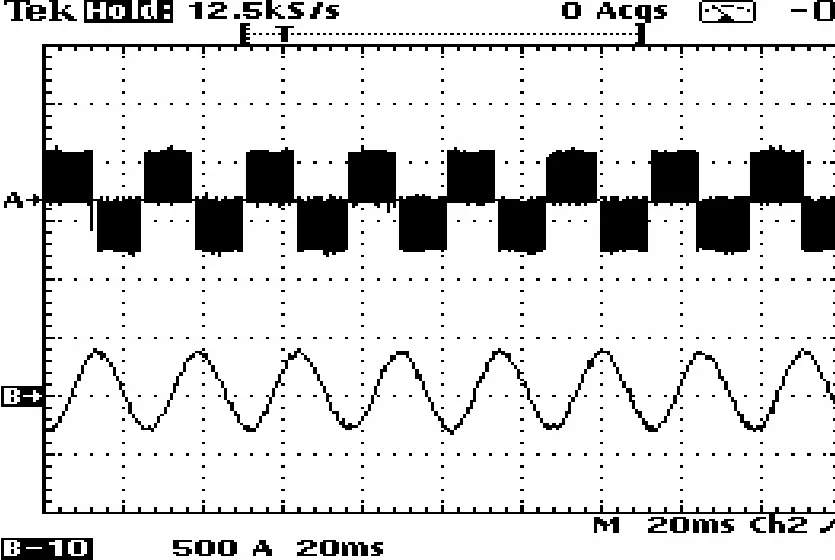
圖10 帶載2400r/min時電機相電壓和電流波形
7 結論
本文設計的多閉環偏差電壓解耦矢量控制方案有較高的控制精度,實時性和動態響應較好。DSP芯片TMS320F2812具有強大的運算能力,非常適合復雜的電機控制方案。其豐富的片內外資源,大大減少了系統的外圍電路,使硬件系統更加緊湊、可靠。
[1] Samer Mayaleh, Suha Bayindir. Online estimation of rotor time constant of an induction motor using recurrent neural networks [J]. IEEE 1998. 654 -661.
[2] Nihat Inanc, Mustafa K Guven. A new sliding mode flux and speed observer for speed sensorless control of induction machine [J]. IEEE 2000. 1079-1085.
[3] Bauer F, Hming H D.Quick response space vector control for a high power three-level inverter drive system[J].EPE Aaschen 1989.417-421.
[4] Gubae Kang, Jinhwan Jung. A new rotor time constant update rule using stator flux estimates for an induction motor [J]. IEEE 1999. 500-508.
[5] 王立新, 周順榮. 一種改進的異步電機矢量控制方法[J]. 中小型電機, 2005, 32(6): 15-17.
[6] F. Bauer, HD. Heining, Quick Response Space Vector Control for a High Power Three-levelinverter Drive System, EPE, 1989. 417-421
[7] T. H. Chin, Approaches for Vector Control of Induction Motor without Speed Sensor, IECON,1994.1616-1620.
[8] 沈瀅,郝榮泰. 感應電機矢量控制解耦算法的研究[J]. 北方交通大學學報, 2003, 27(2):55-56.
[9] Jinhwan J.A Dynamic Decoupling Control Scheme for High—Speed Operation of Induction Motors[J].IEEE Trans.Industrial Electronics 1999, 46(1):100-110.
[10] Texas Instruments, “TMS320F28X System Control and Interrupts Peripheral Reference Guide”,May 2002.
Vector Control System for Asynchronous Motor Base on TMS320F2812
CHEN Shun-zhong, TAN Long-cheng, WANG Qiu-liang
(Institute of Electrical Engineering, Chinese Academy of Sciences, Beijing 100190, China)
Traditional vector control is based on steady-state model of asynchronous motor. The performance of the control system is affected greatly by motor parameters. Combining with the speciality of asynchronous motor, a number of closed loop of the rotational speed, current, and flux are designed in control strategy. Deviation voltage decoupling which depends little on parameters is adopted. Conventional calculation of rotor flux is compensated and corrected. This system effectively reduces the bad effect of the parameters variation. DSP chip TMS320F2812 has powerful operation ability and excellent control capability. The hardware system based on this chip well implements this control scheme. Experimentation indicates that this control system has the advantages of high precision, good real-time characteristics and dynamic response.
deviation voltage decoupling; vector control; rotor flux; TMS320F2812
TM346+.2
A
1000-3983(2010)01-0032-05
2008-10-10

陳順中(1982-),碩士研究生,現從事電力電子與電力傳動研究。