基于模糊位置控制器的研究*PID
2010-09-13 09:25:04李旭偉
湖州師范學院學報 2010年2期
李旭偉
(海軍駐杭州地區軍事代表室,浙江杭州310012)
基于模糊位置控制器的研究*PID
李旭偉
(海軍駐杭州地區軍事代表室,浙江杭州310012)
介紹了電液位置伺服控制系統的組成和工作原理.傳統PID控制器在受到外界干擾時,容易導致過大的超調甚至引起震蕩,從而使得系統的動靜態性能變差.針對此問題,設計了結合PID控制和模糊控制優點的模糊PID控制器.在MA TLAB/Simulink環境下進行仿真,結果表明,與傳統的PID控制器相比,該方法改善了系統的動靜態性能,同時也提高了控制系統的魯棒性和抗干擾性.
模糊PID控制;仿真;Simulink
0 引言
PID控制是比例、積分、微分控制的簡稱,當被控對象的數學模型已知時,PID控制就顯得特別有用.在實際應用中,大多數工業過程都不同程度地存在非線性、參數時變性和模型不確定性,采用傳統的PID控制無法實現對過程的精確控制.本文將模糊控制與PID控制相結合,構成模糊PID控制法,使其既具有模糊控制靈活、適應性強的優點,又具有PID控制精度高的特點[1].
1 位置控制器的設計
1.1 電液位置伺服控制系統的組成
電液位置伺服系統組成如圖1所示,主要由控制器、放大器、伺服閥、液壓缸和位置傳感器組成.
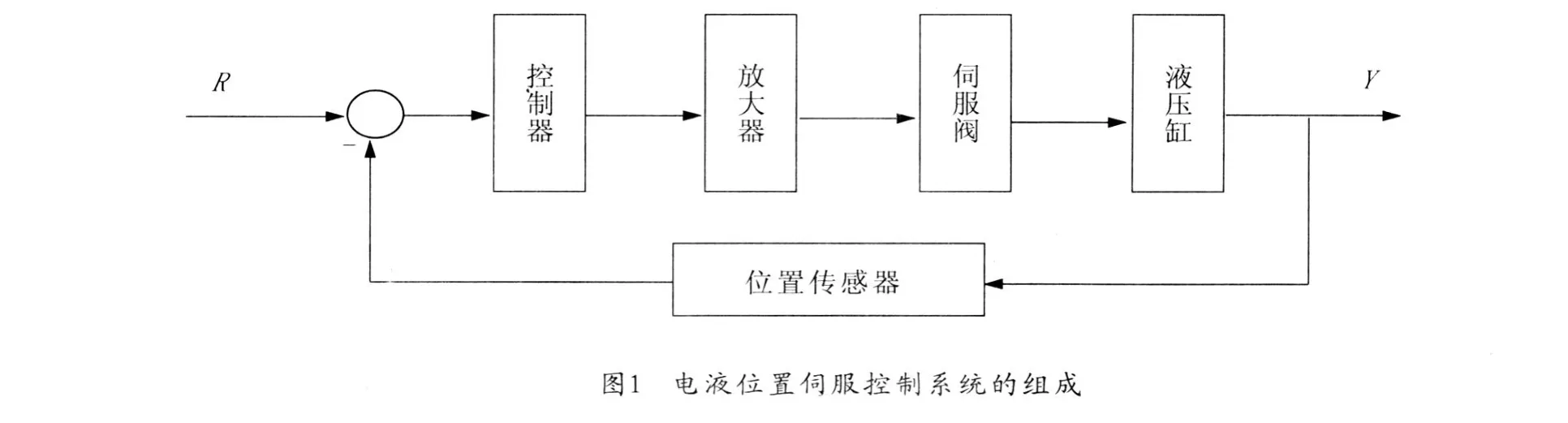
圖1中R為給定值,Y為液壓缸輸出位移,經過位置傳感變送器與給定值R作比較,產生誤差信號.控制器內預置的控制算法對誤差信號進行運算,其輸出信號經過放大器放大后控制伺服閥,伺服閥將放大器送來的電信號轉變為伺服閥的閥芯位移,通過伺服閥的流量變化來控制液壓缸活塞的伸縮位移,驅動工作臺向消除偏差的方向運動.
1.2 模糊PID控制器的設計
模糊PID控制算法以誤差E和Ec為輸入,利用模糊控制規則在線對PID參數進行修改,以滿足不同時刻的E和Ec對PID參數的要求,輸出為Kp,Ki,Kd.其結構如圖2所示[2,3].
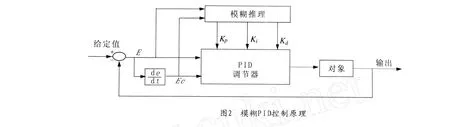
該控制系統是一個兩輸入三輸出的形式,輸入變量為E和Ec,輸出變量為Kp,Ki和Kd,其調整原則為:
(1)當誤差|E|較大時,為使系統具有較好的快速跟蹤性能,不論誤差的變化趨勢如何,都應該取較大的Kp和較小的Kd,同時為避免系統響應出現較大的超調,應對積分作用加以限制,取較小的Ki值.
(2)當誤差|E|處于中等大小時,為使系統響應具有較小的超調,Kp應取得小些,同時為保證系統的響應速度,Ki和Kd的大小要適中,其中Kd的取值對系統響應的影響較大.
(3)當誤差|E|較小時,為保證系統具有較好的穩態性能,Kp和Ki應取得大些,同時為避免系統在設定值附近出現振蕩,并考慮系統的抗干擾性能,當|Ec|較小時,Kd可取大些;當|Ec|較大時,Kd應取小些.
1.3 隸屬度函數及模糊化
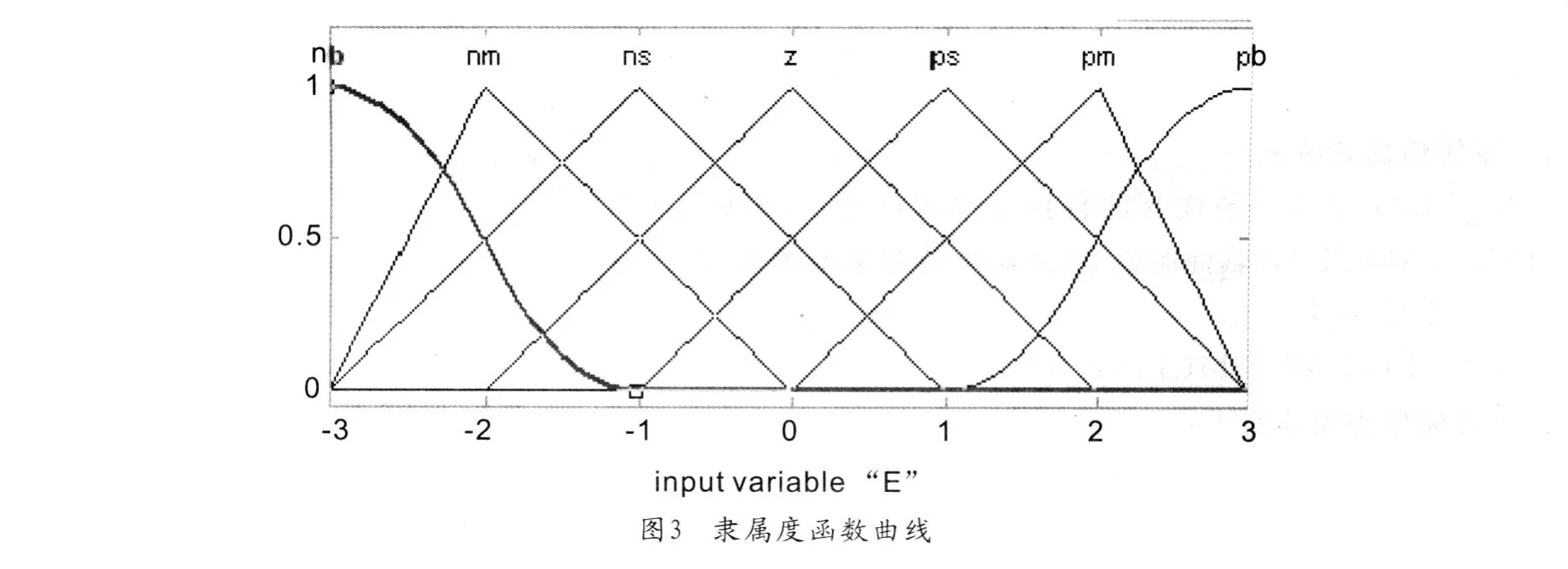
輸入變量E,Ec,Kp,Ki和Kd語言值的模糊子集取為{負大,負中,負小,零,正小,正中,正大},并簡記為{NB,NM,NS,ZO,PS,PM,PB},論域為{-3,-2,-1,0,1,2,3}.隸屬函數采用三角形函數,其函數曲線如圖3所示.
根據設計人員的經驗,得到PID三個控制參數的模糊控制規則表,見表1~表3.
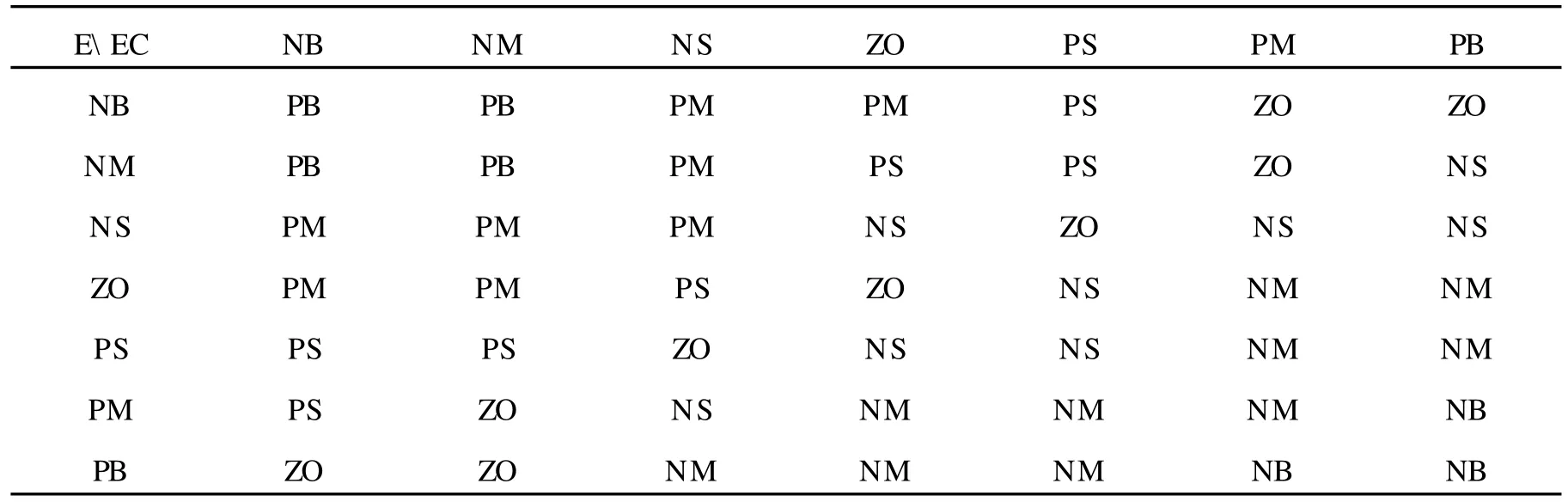
表1 Kp的模糊控制規則表
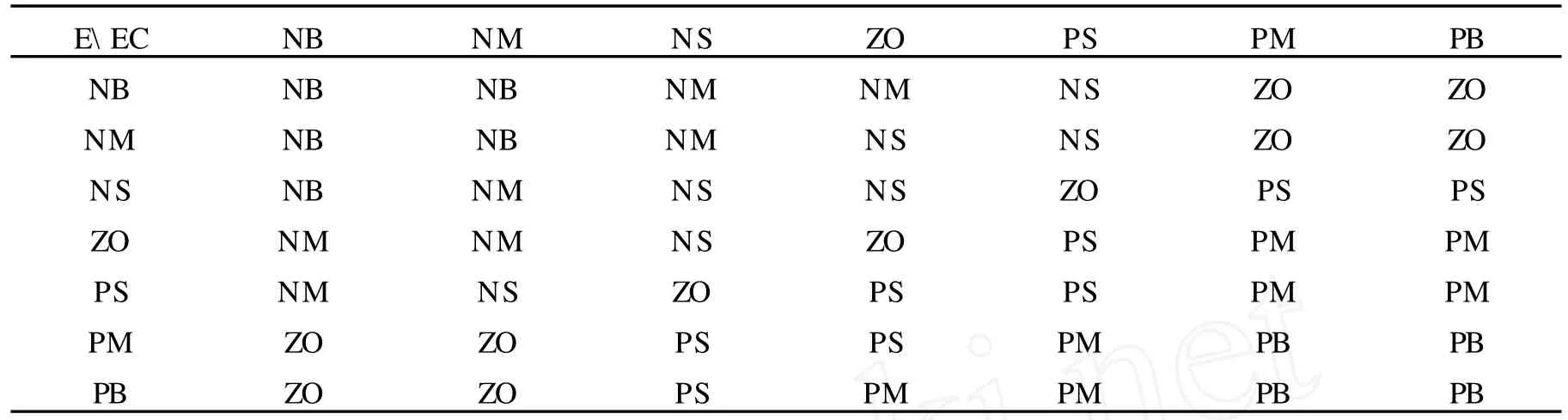
表2 Ki的模糊控制規則表
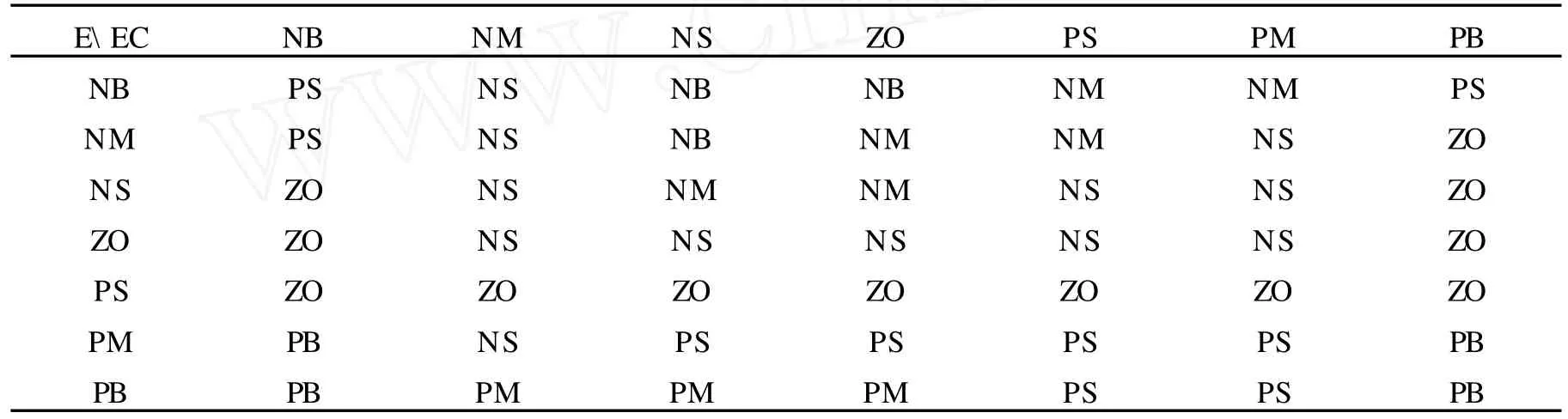
表3 Kd的模糊控制規則表
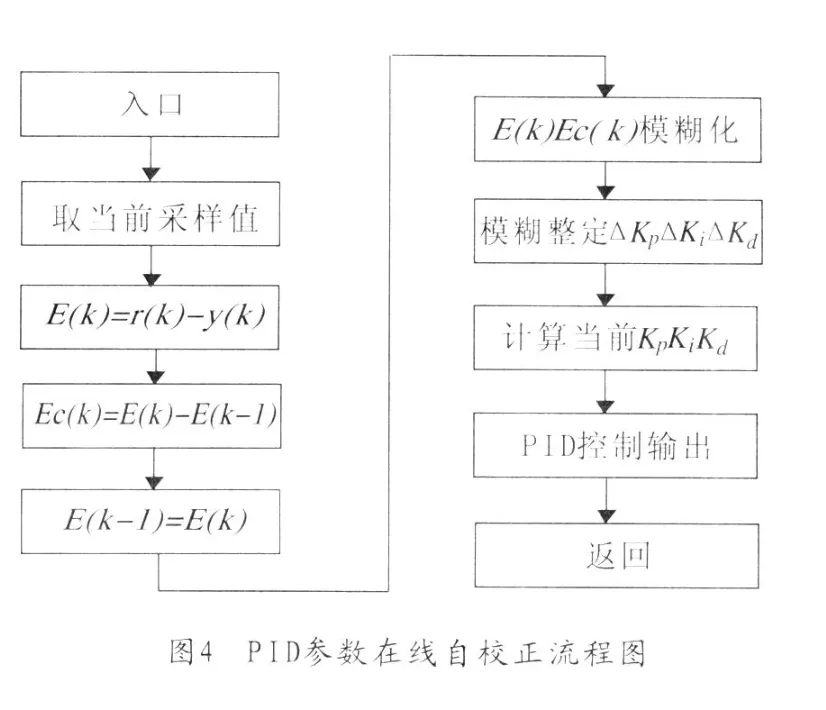
線運行過程中,控制系統通過對模糊邏輯規則的結果處理和運算,完成對參數的在線自校正.其工作流程圖如圖4所示.
2 MA TLAB/SIMUL IN K仿真和分析
2.1 系統仿真方塊圖
MA TLAB是當今最優秀的科技應用軟件之一,SIMUL IN K是MA TLAB軟件的擴展,是實現動態系統建模和仿真的一個軟件包[4~6].
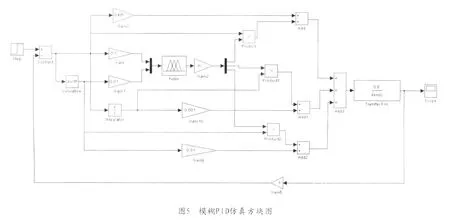
基于MA TLAB/SIM UL IN K圖形化工具建立的模糊PID仿真模型如圖5所示:
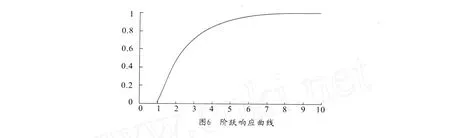
2.2 仿真結果
運行系統后,得到的仿真圖如圖6所示:
3 結論
模糊PID控制器將模糊控制和傳統的PID控制相結合,在常規PID調節器的基礎上加上模糊控制環節,它將傳統的PID控制經驗的優點和模糊控制的靈活性、自適應性相結合,比傳統PID控制具有更好的動靜態性能和抗干擾能力.
[1]趙永娟,孫華東.基于Matlab的模糊PID控制器的設計和仿真[J].微計算機信息,2009,25(1):48~49,40.
[2]胡曉磊,喻俊志.一種新型模糊PID控制器在伺服系統的應用[J].電力電子技術,2009,43(11):35~37.
[3]李曉豁,吳志強.基于參數自適應模糊PID控制器的掘進機恒功率調速系統[J].制造業自動化,2009,31(1):45~47.
[4]趙巖,張春晶.基于模糊PID控制器的汽車雨刮系統的研究[J].制造業自動化,2010,32(02):179~180,188.
[5]廖力達,王北戰,章運奇.自適應模糊PID控制器的研究與應用[J].建筑機械(上半月),2009(8):59~62,68.
[6]董瑞洪,梁磊,任旭鵬.溫度控制系統的無超調模糊——PID控制器設計[J].科學技術與工程,2009,9(2):267~271.
Abstract:This paper introduces the composition and p rincip le of the electro-hydraulic position servo control system.The traditional PID controller w ill show bad dynamic and static state capability w hen a disturbance happens.The design of the Fuzzy-PID controller combining the advantages of PID control and fuzzy control w ith simulation by the Simulink software show s that the Fuzzy-PID controller has a better dynamic and static state performance than traditional PID controller.
Key words:fuzzy-PID control;simulation;Simulink
A Research of the Position Controller Based on Fuzzy-PID
L IXu-w ei
(Office of Navy M ilitary Rep resentatives in Hangzhou,Hangzhou 310012,China)
TP332
A
1009-1734(2010)02-0060-04
2010-03-10
李旭偉,工程師,從事機械與自動化研究.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
