基于卡爾曼濾波的羅蘭C時差信號處理
2010-08-29 01:38:58黃欣欣楊東凱
全球定位系統 2010年5期
黃欣欣,楊東凱
(北京航空航天大學電子信息工程學院,北京100191)
0 引 言
羅蘭C(Loran-C)是陸基中遠程精密無線電導航系統。系統的地面發射臺通常由一個主臺和兩個以上的副臺組成,接收機通過測量主副臺脈沖到達時間差 TD(Time Difference),利用雙曲線原理進行定位。羅蘭C信號主要依靠地波傳播,信號功率大、抗電子干擾和抗天體磁暴能力強,這些優點是衛星信號所不具備的。增強型羅蘭C系統是一個完全獨立的、GNSS的最重要的互補備份系統,是羅蘭C系統的發展方向[1]。
在羅蘭C系統中,受到雜波和環境噪聲的影響會造成較大的時差測量誤差,甚至會出現因周期識別模糊而造成時差出現幾倍10 μ s的誤差,大大降低羅蘭C接收機的定位精度。解決這個問題的一種辦法是在前端信號處理時,將噪聲和干擾處理干凈,從而避免周期識別模糊。但是僅靠前端的信號處理有時不能完全解決問題,這時就應該采取后端數據處理的方法加以消除。
卡爾曼濾波[2]是一種遞推線性無偏最小均方誤差估計算法,它能夠平滑數值的離散性。采用卡爾曼濾波對羅蘭C接收機輸出的時差數據進行處理,減小時差測量誤差,從而提高定位精度。
1 卡爾曼濾波
使用卡爾曼濾波時,首先要對應用對象進行建模,得到狀態方程與觀測方程,并且要求狀態方程與觀測方程均為線性,系統噪聲與觀測噪聲均為白噪聲。簡要介紹建立在羅蘭C時差處理問題的卡爾曼濾波算法中用到的消息模型與觀測模型。
1.1 消息模型[3]
消息模型用于描述目標的運動。這種模型將某一時刻的狀態變量表示為前一時刻狀態變量的函數,以供濾波算法使用。主要介紹CV(Constant Velocity)模型與CA(Constant Acceleration)模型。
1)CV模型
CV模型假定目標做勻速直線運動,而將加速度看作是零均值白噪聲形式的擾動。其離散形式的狀態方程為

白噪聲uk為系統噪聲矢量,其協方差陣為Qk。Φk為狀態轉移矩陣,具體形式如式(2)所示,其中T為采樣間隔。

2)CA模型
CA模型假定目標做勻加速直線運動,而將加速度看作是零均值白噪聲形式的擾動。其離散形式的狀態方程為

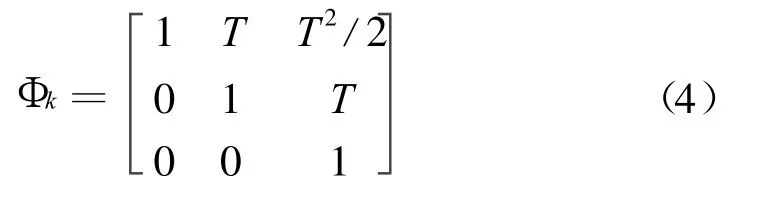
白噪聲uk為系統噪聲矢量,其協方差陣為Qk。Φk為狀態轉移矩陣,具體形式如式(4)所示,其中T為采樣間隔。
1.2 觀測模型
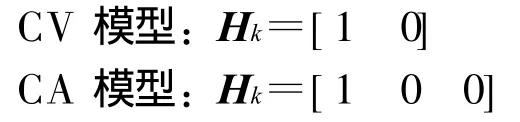
其中,zk為觀測變量,即實際測量的時差值;wk為觀測噪聲,其協方差陣為Rk;Hk為觀測矩陣,CV、CA模型的Hk取值分別為
1.3 卡爾曼濾波公式
用卡爾曼濾波的方法處理狀態方程(1)或(3)、觀測方程(5),就得到如下的卡爾曼濾波公式[4]
預測

預測誤差相關陣

增益陣

濾波

濾波誤差相關陣

2 具體實驗過程及結果分析
所采用的羅蘭C數字接收機型號為DE8100,該接收機平均每隔5 s更新一次數據,RS232串口輸出數據保存為逗號分隔值文件,包括定位點經緯度、同一個臺鏈中兩個臺對的時差(TD1和TD2)等數據。根據研究需要,只選取時差數據進行處理。首先對卡爾曼濾波器進行參數設置:
根據接收機的測量精度,設觀測噪聲協方差Rk=1;
系統噪聲協方差Qk=10-4;
濾波誤差相關陣初值P0=104I。
2.1 靜態測量數據處理
靜態測量[5],即待測點相對于其周圍固定點沒有位置變化,或在一個觀測周期內,位置變化無法察覺。第一次測量是在羅蘭C7430臺鏈信號覆蓋的區域內選擇某一待測點(山東省煙臺市某地),進行了觀測時長約40 min的數據采集。分析該狀態下采集得到的時差數據的特征,其相應的時差一次變化率很小(最大值為0.01 μ s/s),可以將時差近似看成是無機動變化的,因此使用CV模型對其進行處理。選取狀態初值x0=[z10]T。分別對TD1、TD2進行卡爾曼濾波,濾波前后的時差值如圖1所示,時差單位為 μ s。
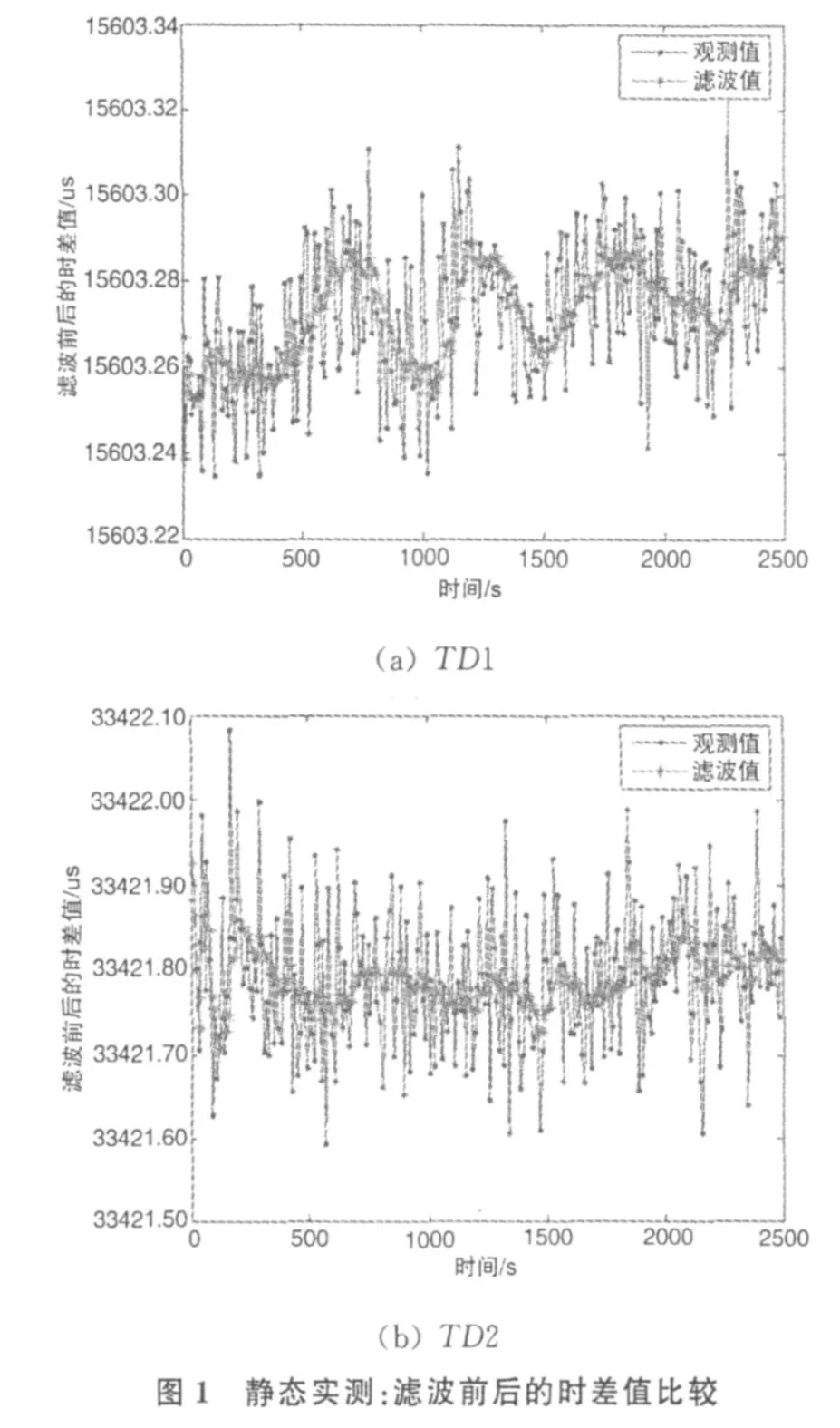
對濾波前后的時差值進行統計計算,求得的均方差如表1所示。可以看到經過卡爾曼濾波后,時差TD1和TD2的均方差都明顯地減小,這是由于所建立的卡爾曼濾波模型準確,取得了良好的跟蹤性能和濾波精度。

表1 濾波前后的時差均方差比較
2.2 動態跑車數據處理
第二次測量是在動態跑車的狀態下進行數據采集。平均運動速度為38 km/h。分析該狀態下采集得到的時差數據的特征,其相應的時差一次變化率(最大值為0.1 μ s/s)和二次變化率(最大值為0.02 μ s/s2)也呈現一定的值,但是,這些值相對有較大加速度的運動體來說也是比較小的,所以就時差本身的機動性而言,它屬于弱機動變化,因此選用CA模型對其進行處理,選取的狀態初值為x0=[z1 0 0]T。濾波前后的時差值如圖2所示。
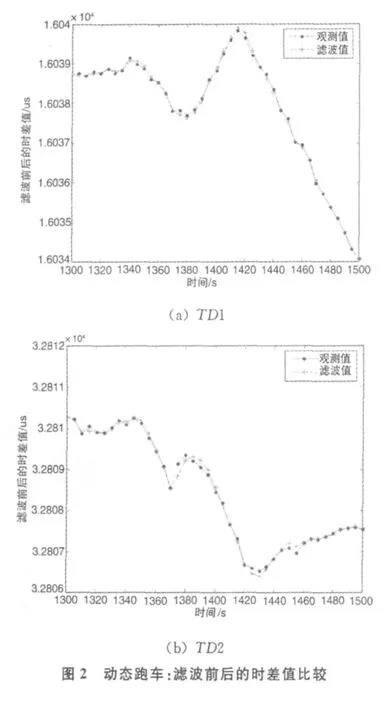
從圖2可以看出,所采用的CA模型濾波算法能夠有效地去除動態跑車情況下的測量時差奇異值,如圖2(b)中第1380 s時刻,達到平滑數據的目的,同時也能較好地跟蹤上時差的變化。
3 結 論
針對靜態定位和動態跑車兩種情況下的羅蘭C實測時差信號的特征,設計卡爾曼濾波算法,對實際測量數據進行處理。結果表明,所采用的卡爾曼濾波算法能夠有效地減少時差的測量誤差。下一步工作將研究卡爾曼濾波器參數的大小對濾波性能的影響,對已有算法進行改進。
[1]Gregory W J,Peter F S,Richard J H,et al.An E-valuation of eLoran as a Backup to GPS[C]//Technologies for Homeland Security,2007 IEEE Conference,Woburn,M A,2007:95-100.
[2]李建勛,柯熙政,胡 鋼.長河增強系統發播信號的定時誤差及其Kalman修正[J].測試技術學報,2008,22(2):145-149.
[3]周宏仁,敬忠良,王培德.機動目標跟蹤[M].北京:國防工業出版社,1991.
[4]朱云龍,楊東凱,柳重堪.一種用于高動態GPS頻率估計的濾波算法[J].北京航空航天大學學報,2009,35(1):23-27.
[5]杜曉輝,任 章.基于卡爾曼濾波的GPS靜態定位精度分析[J].全球定位系統,2008,34(5):47-51.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電源技術(2016年9期)2016-02-27 09:05:39
