裝片機晶片臺運動控制系統的分析
2010-08-08 10:22:52徐品烈任紹彬
電子工業專用設備 2010年5期
徐品烈,任紹彬,郝 靖
(中國電子科技集團第四十五研究所,北京東燕郊 101601)
裝片機的主要功能是完成芯片的識別檢測與貼裝任務,設備在運行過程中,送料部分送入粘貼用的芯片和引線框架,視覺檢測部分對芯片進行檢測,對檢測合格的芯片,由拾取機構將芯片貼裝于涂敷有粘接劑基底材料(支架、PCB板等)上,使芯片與基底材料固定在一起。
晶片臺(Wafer Stage)用于放置晶圓并與圖像識別系統相配合,圖像系統對藍膜上滑切分割后的芯片進行檢測和識別,對檢測合格的芯片,給出位置信息,控制晶片臺和真空吸頭等執行裝置,按要求將芯片送至芯片拾取位置,快速準確地完成對芯片的貼裝。
1 晶片臺系統的構成
晶片臺機構根據CCD相機測量的數據,完成自動對準功能,要求在對準的過程中,實現精確的定位和快速的運動。晶片臺系統主要由圖像采集和處理部分、運動控制部分、伺服驅動及電機、晶片臺執行機構四部分組成,組成示意如圖1。
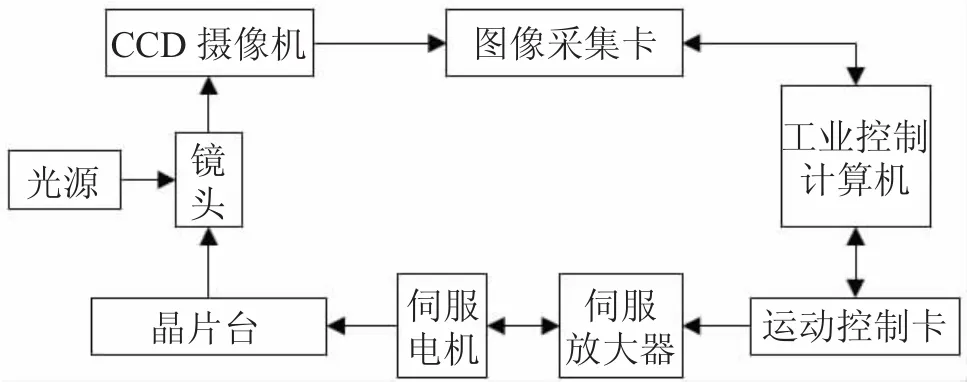
圖1 晶片臺系統構成示意圖
1.1 圖像
視覺檢測主要是利用機器視覺技術,通過圖像處理、模式識別方法,對芯片圖像進行分析和處理,完成芯片的定位與缺陷檢測等功能。視覺檢測對芯片的定位,可以把芯片位置的精確信息傳遞給運動控制模塊,使控制模塊能夠根據實時狀態調整控制參數,光源、鏡頭、CCD攝像機、圖像采集卡屬于圖像采集裝置,主要功能是完成芯片圖像的采集,并送入控制計算機進行處理和分析;芯片圖像經處理和分析后,結果轉換成運動控制參數,傳遞給運動控制部分;視覺檢測的主要任務是完成芯片的定位和缺陷檢測,給出運動控制參數。定位用于確定芯片的精確位置,進行缺陷檢測和拾取;缺陷檢測則要完成墨點、缺角、崩邊、角度、緊鄰芯片等檢測。
1.2 運動控制
運動控制是粘片機控制系統的核心部分。所謂運動控制,是指在復雜的條件下,將預定的控制方案、規劃指令轉變成期望的機械運動,實現對被控目標精確的位置控制、速度控制、加速度控制、轉矩或力的控制以及這些控制的綜合控制。位控制器將分析、計算得出的運動命令以數字脈沖信號或模擬電壓信號的形式送到電機驅動器中;驅動器進行功率變換,并驅動電機根據上位控制指令轉動;電機通過傳動機構帶動機械機構運行,這樣便可以得到預期的運動形式。在閉環系統中,還需要檢測反饋裝置將檢測到的位置反饋到驅動器或上位控制器中。
1.3 伺服驅動及電機
交流伺服系統可構成半閉環或全閉環控制。半閉環控制中,位置反饋采用轉角檢測元件,直接裝在伺服電機或絲杠端部,伺服電機上的編碼器反饋即做速度環,也做位置環。由于大部分機械傳動環節未包括在系統閉環環路內,因此可獲得較穩定的控制特性。這種控制方式對于傳動鏈上的間隙及誤差不能通過反饋校正,但可采用軟件定值補償的方法來適當提高其精度。
1.4 執行機構
晶片臺為滾珠絲杠微米級精密x-y平臺,包含x、y兩個軸,分別由兩個伺服電機驅動。每個方向各有一幅直線導軌幅,每條導軌上各有兩個滑塊,晶片臺采用正交十字形結構,如圖2所示。
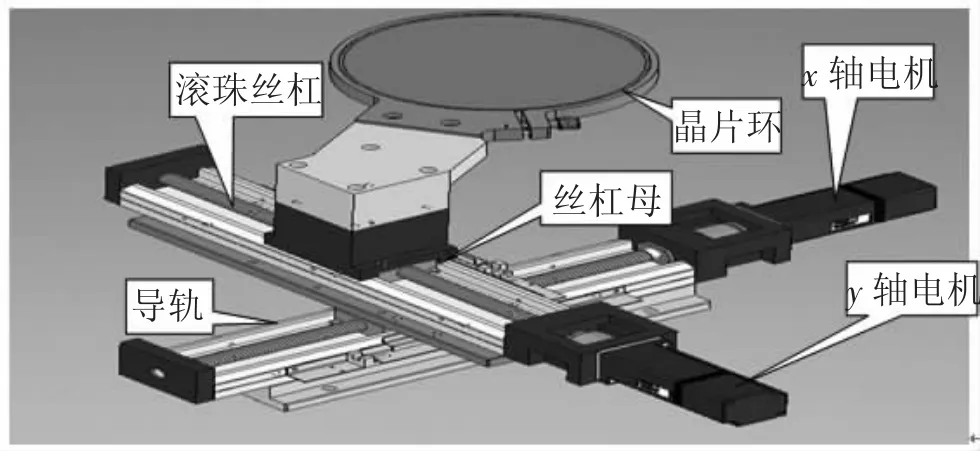
圖2 晶片臺機構三機械位實體圖
為了達到該設備的技術指標,對該機構提出的性能指標為:
x向最大行程:200 mm,1 mm行程的定位精度:±5 μm,運行時間小于 45 ms。
y向最大行程:200 mm,1 mm行程的定位精度:±5 μm,運行時間小于 45 ms。
2 晶片臺控制系統結構
控制系統采用主從式控制方式,上位機為工控機,下位機為多軸運動控制卡。采用交流伺服電機驅動,編碼器位置反饋的結構進行控制。控制結構圖見圖3。
該伺服控制系統是一個半閉環伺服控制系統,它的控制原理為:工業PC機作為上位機主要實現系統的管理功能和整機協調功能,與固高運動控制器通過網口通訊。根據晶片臺的測試要求,由工業PC機發出運動控制指令,固高運動控制器按照接受到PC機的指令進行相應的運動控制,固高運動控制器在接受指令信號后,通過電機驅動器的轉換和放大后,驅動x、y電機來對工作臺進行控制,工作臺運行到相應位置后,固高運動控制器再根據編碼器的位置信息反饋信號把相關位置信息反饋給工業PC機。其中,編碼器把信號直接反饋給驅動器,形成位置反饋的半閉環控制,而伺服驅動器把晶片臺的位置信息再反饋給固高運動控制器,從固高運動控制器再形成位置環的閉環控制。
晶片臺采用編碼器反饋的半閉環控制方式來控制伺服電機進行工作,控制原理如圖3所示:整機主控工控機向控制模塊發送信號指令,驅動交流伺服電機轉動,使工作臺移動。同時,x、y各軸編碼器記錄晶片臺移動的距離,晶片臺移動到指定的位置后,電機停止轉動,編碼器把工作臺運行的相關位置信號反饋回工控機,并根據工控機的指令要求,進行相應的工作。
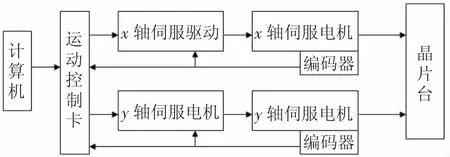
圖3 晶片臺控制系統構架圖
這種半閉環控制方式不但可以保證工作臺x、y方向運行的綜合精度,還可以克服長時間使用后,絲杠磨損對工作臺精度的影響,也可以提高x、y軸運動的穩定性。
3 伺服電機的選擇
固高多軸運動控制器是基于VME總線的運動控制器,與PC機通過網口進行數據交換,它與PC機構成主從式結構:PC機負責人機交互界面管理和控制系統實時監控等方面的工作(例如鍵盤和鼠標的管理、系統狀態的顯示、控制指令的發送、外部信號的監控等);核心的運動控制及多軸之間的邏輯配合都可在多軸運動控制器內完成,達到高速、高精度實時運動控制功能。
交流伺服電機不僅用來實現電能和機械能之間的轉換,而且還用作機電信號的轉換、檢測、執行、控制、反饋等,在機電一體化設備中得到廣泛的使用。近年來,隨著大規模集成電路和計算機控制技術的發展以及現代控制技術的應用,特別是矢量控制技術的應用,使得交流伺服驅動具備了調速范圍寬、穩速精度高、動態響應快等特點,因此也常被用在控制系統中。
在此設計中,驅動電機選用的是安川公司生產的sigamalV系列的SGMJV-01ADA21型交流伺服電機。
下面以x軸電機的選擇為例,進行電機的選型計算。
(1)最大速度(Vmax)
在連續運行時,x軸主要用于芯片相對于拾取點的偏移量,其移動距離較小,一般最大為1 mm。
電機的額定轉速為3 000 r/min,由于電機通過聯軸器與絲杠相連,減速比為1∶1,可計算出Vmax=50 r/s=500 mm/s。
(2)負載慣性矩計算(JL)
絲杠(J1)φ12 mm,長度200 mm,其轉動慣量為JB:

可動部分質量10 kg,則可動部分轉動慣量為JT:

全慣性慣量:JL=JB+JT=2.86×10-5(kg·m2)
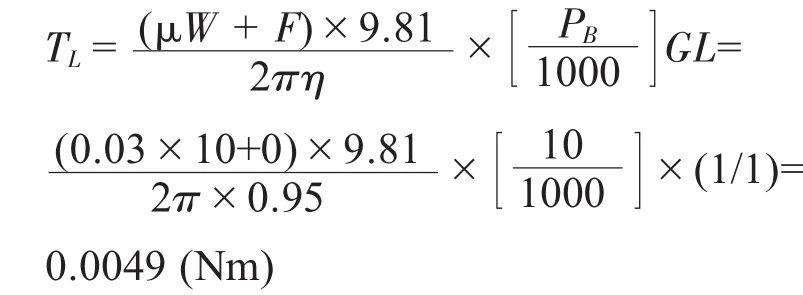
(3)負載轉矩計算(TL)
可動部分質量10 kg、摩擦系數(μ)0.03、機械效率(η)0.95,
(4)容量選擇條件
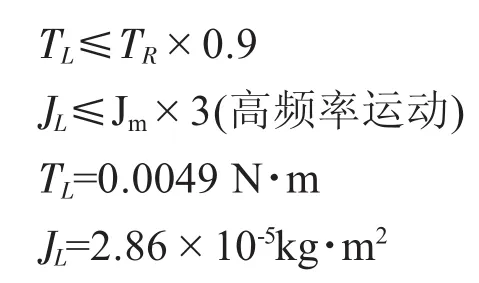
從容量選擇條件,可選安川公司SGMJV-01ADA21,此電機的 Jm=0.0665×10-4kg·m2,TR=0.318Nm,TAC=1.11 Nm額定轉速3 000 r/min,帶有13位增量編碼器,配置SGDV-R90A伺服驅動器,此款驅動器即可以接受脈沖量信號進行位置控制,也可以接收模擬量進行速度、轉矩控制,驅動器內有先進的速度環PID控制器。
(5)最短加/減速時間計算(tac)
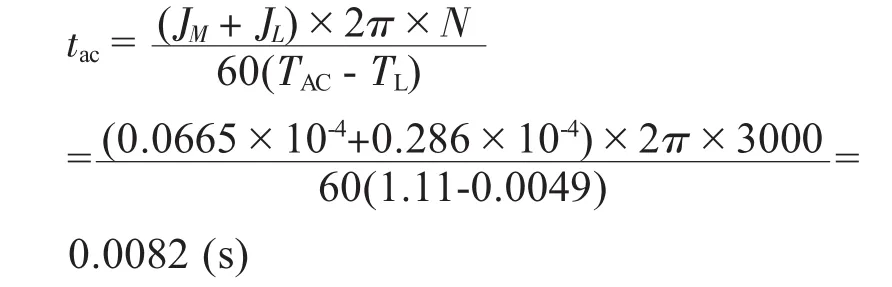
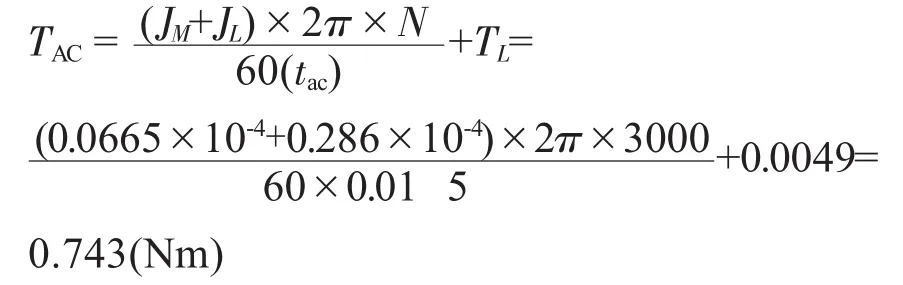
最短加速/減速為0.015 s時的加速/減速轉矩:
(6)運行模式
設備的運行周期為240 ms,晶片臺的運行周期為40 ms,轉矩運行曲線如圖4所示。
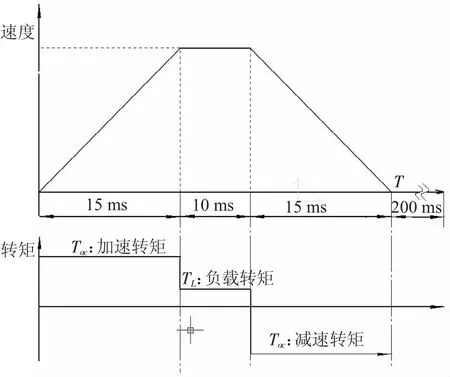
圖4 運行模式及轉矩曲線
計算實際轉矩:
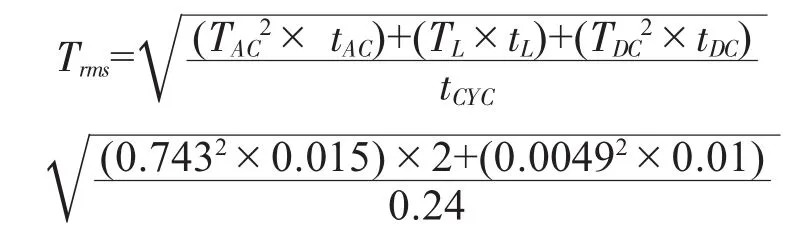
因為SGMJV-01ADA21,此電機的額定轉矩在0.318 Nm,可以在指定的運行模式下連續運行。
4 閉環控制分析
固高運動控制器的PID控制器在原有傳統的控制器上加有速度前饋及加速度前饋控制與光柵尺反饋信號構成了位置控制環路,如圖5。
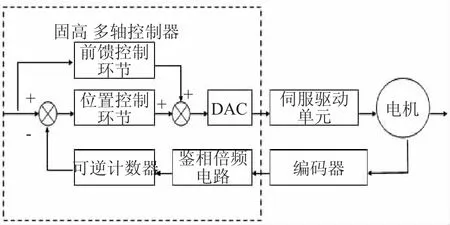
圖5 閉環控制系統組成
從圖5中可以看出,位置控制器的工作原理為:位置調節器中的位置控制程序周期讀入由插補計算和倍率調整后的理論位置,如Δx,Δy,Δz等,并采樣由位置測量組件反饋的坐標軸實際位置,經誤差補償后形成真正的坐標軸實際位置;理論位置和實際位置相比較求得跟隨誤差,根據跟隨誤差所在區間算出進給速度指令的數字量;此數字量經D/A轉換,作為伺服驅動單元速度環的輸入速度指令,由伺服單元驅動坐標軸運動,實現按誤差的位置控制。在一個位置控制周期內,速度指令保持不變。
5 基于PID調節的晶片臺控制系統的實現
PID控制是按偏差的比例(P)、積分(I)、微分(D)組合而成的一種基于誤差的控制規律。比例增益為系統提供剛性,它的大小決定系統響應的快速性;積分增益可以消除系統的穩態誤差;微分增益是為系統提供穩定性的阻尼項,能改善系統的動態特性,阻止偏差的變化,有利于減小超調量,縮短調節時間,允許加大比例增益,使得系統的穩定誤差減小,提高控制精度。典型的PID控制如圖6所示。
(1)比例系數Kp
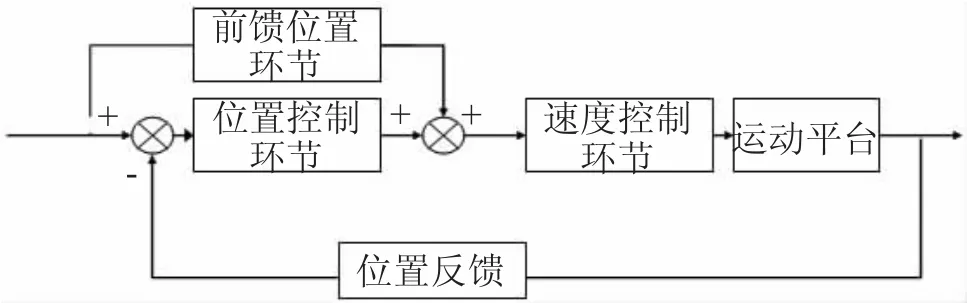
圖6 系統結構模型
比例控制器是一個放大倍數可調整的放大器,控制器的輸出信號成比例地反應輸入信號。提高比例系數Kp,可以減小系統的穩態誤差,從而提高控制精度。對于一階系統,提高Kp,還可以降低系統的慣性。但是,比例系數Kp過大會使系統產生較大超調,甚至導致不穩定;若Kp取得過小,能使系統減少超調量,穩定裕度增大,但會降低系統的調節精度,調節時間延長。
(2)積分系數Ki
積分調節可提高系統的抗干擾能力,消除系統的靜態誤差,適用于有自平衡性的系統。但它有滯后現象,使系統的響應速度變慢,超調量變大,并可能產生振蕩。加大積分系數Ki(減小Ti)有利于減小系統靜差,但過強的積分作用會使超調加劇,甚至引起振蕩;減小積分系數Ki雖然有利于系統穩定,避免振蕩,減小超調量,但又對系統消除靜差不利。
(3)微分系數Kd
微分調節作用主要是針對被控對象的大慣性改善動態特性,它能給出響應過程提前制動的減速信號。它有助于減小超調,克服振蕩,使系統趨于穩定;同時加快系統的響應速度,減小調整時間,從而改善了系統的動態特性。Kd值對響應過程影響非常大。若增加微分作用Kd,有利于加快系統響應,使超調量減小,增加穩定性,但也會帶來擾動敏感,抑制外干擾能力減弱,若Kd過大則會使響應過程過分提前制動從而延長調節時間;反之,若Kd過小,調節過程的減速就會滯后,超調量增加,系統響應變慢,穩定性變差。
控制卡是工作臺控制的核心,編碼器的反饋信號與控制卡形成位置閉環控制。控制卡發位置脈沖量,經過D/A轉換后輸出±10 V的模擬量給驅動器進行速度控制。這些變量在系統性能的調試及程序控制必須用到,在作系統性能調試之前必須將控制卡的PID參數設置合適的值,以便系統能正常工作。
遵循先加比例再加積分最后加微分的原則,先調整系統的位置曲線(階躍響應),然后調整系統的速度曲線(跟隨誤差)。通過總結曲線設置適當的比例增益和微分增益,調整出比較理想的曲線,見圖7。從曲線上可以看出,系統不僅響應比較快而且命令位置與實際位置重合的很好,穩態誤差很小。
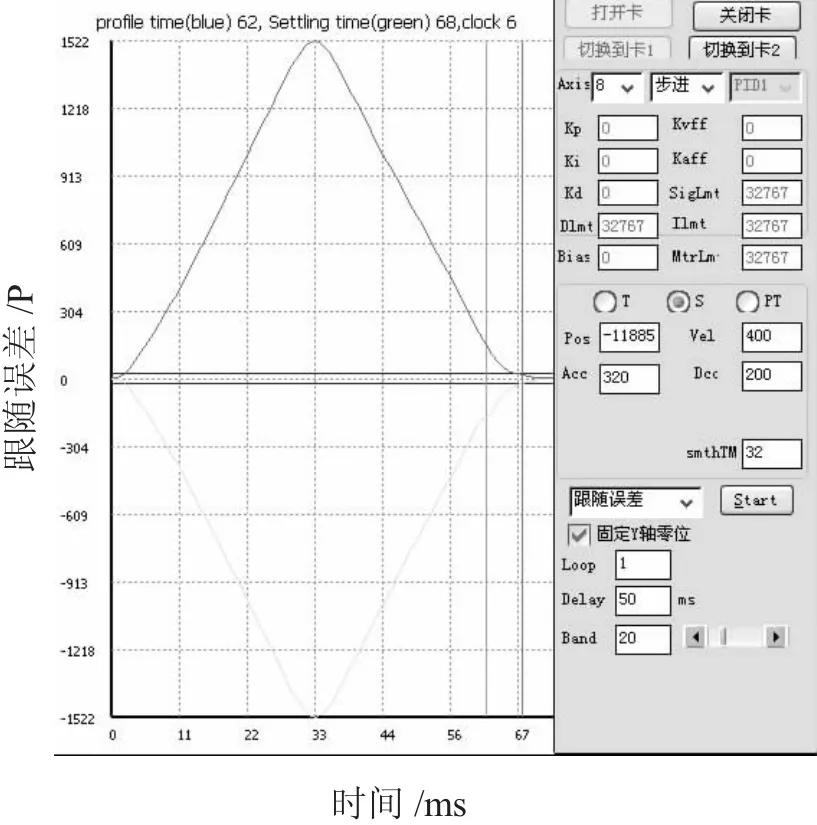
圖7 跟隨誤差曲線

圖8 速度曲線
在調整完系統位置曲線后,接下來進行速度曲線的調整,這個過程是調整運動軸在運動中實際速度與命令速度的跟隨情況,以及調整跟隨誤差的大小。控制器中的速度前饋增益及加速度前饋增益這兩個參數用于消除系統運行中的跟隨誤差,速度前饋增益減小由于阻尼(與速度成正比)引入的跟隨誤差,加速度前饋增益較小或消除由于系統慣性(與加速度成正比)帶來的跟隨誤差。
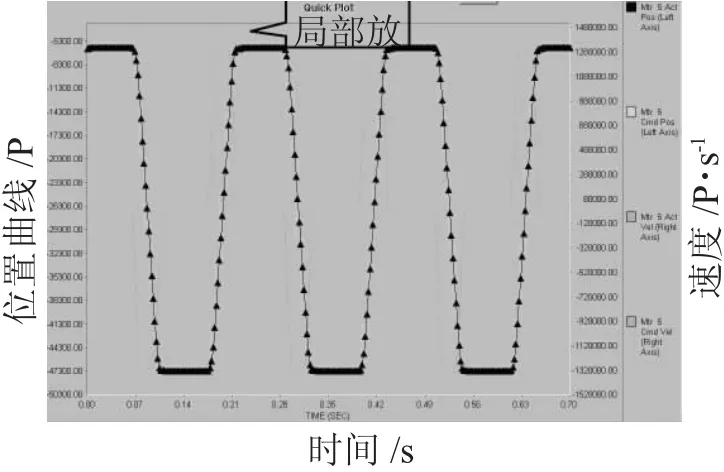
圖9 x軸位置曲線
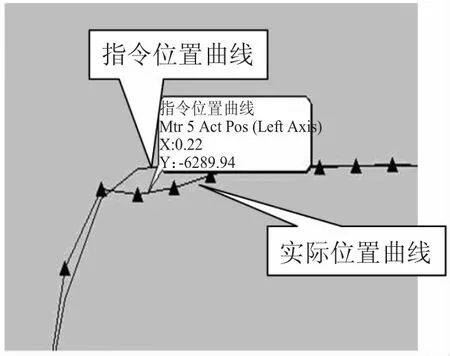
圖10 位置曲線的局部放大圖
從圖9中可以看出,實際位置曲線x軸從5 300到達6 300時,對應的時間軸坐標為0.185到0.220,因為一個脈沖對應1 μm,實際運行的距離為1 mm,所用時間為35 ms,速度指標達到了設計要求;從圖10中可以看出到達目標位置時有輕微的滯后和震蕩,但震蕩幅度在15 μm以下,滯后時間也沒有超過10 ms,能滿足實際要求。
6 結論
由測試結果可以得出,采用伺服電機驅動,以絲桿副和直線導軌副為執由測試結果可以得出,采用伺服電機驅動,以絲桿副和直線導軌副為執行機構的晶片臺控制系統,其運行速度完全達到了設計指標,能夠滿足實際需要;但是由于此種機構的固有特性,如慣量大,因此機構運行到目標位置時,有時間上的滯后和輕微的震動。
[1] THK CO.,LTD.THK綜合商品目錄,CATALOG,.No.300-4T[Z].
[2] 胡裕德馬樂生.伺服系統原理與設計[M].北京:北京理工大學出版社,1993.
[3] 劉政華何將三等編著.機械電子學[M].長沙:國防科技大學出版社,年.
[4] 魏俊民周硯江.機電一體化系統設計[M].北京:中國紡織工業出版社,1998.
[5] 陶永華.新型PID控制及其應用[M].北京:機械工業出版社,2002,9.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
測控技術(2018年8期)2018-11-25 07:42:16
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電子世界(2016年22期)2016-03-12 22:15:32