基于Kalman濾波的目標信號TOA測量校正
2010-08-06 09:29:06徐自勵劉昌忠黃忠濤何東林
通信技術 2010年6期
徐自勵, 劉昌忠, 黃忠濤, 何東林
(中國民用航空局第二研究所,四川 成都 610041)
0 引言
多點定位系統(tǒng)中,目標信號到達時間(Time of Arrival,TOA)的測量準確度直接決定了系統(tǒng)對目標的定位精度。多點定位系統(tǒng)遠端接收站對目標信號TOA的測量基于圖1所示原理:高穩(wěn)定度晶振輸出的脈沖經倍頻后得到測時時鐘脈沖,收到目標信號時,計數(shù)器輸出當前的脈沖計數(shù)值,經計時器乘以脈沖周期并由GPS秒脈沖標上絕對時標后,輸出目標信號TOA。這里的GPS秒脈沖,具有對計數(shù)器清零(實現(xiàn)多站同步)與提供目標信號TOA絕對時標的雙重作用。理論上說,如果晶振頻率絕對精確穩(wěn)定,GPS秒脈沖也絕對穩(wěn)定,則測量到的目標信號TOA將絕對準確。然而,實際上晶振頻率存在漂移,GPS秒脈沖存在抖動,從而降低了目標信號TOA測量的準確度。
本文針對多點定位系統(tǒng)遠端站測量目標信號TOA的實際問題,分析了晶振頻率偏移和GPS秒脈沖抖動對TOA測量準確度的影響,導出了基于Kalman濾波的目標信號TOA測量校正方法。數(shù)值仿真證明此方法可以有效地改善目標信號TOA的測量準確度,具有較強的現(xiàn)實意義與實用價值。
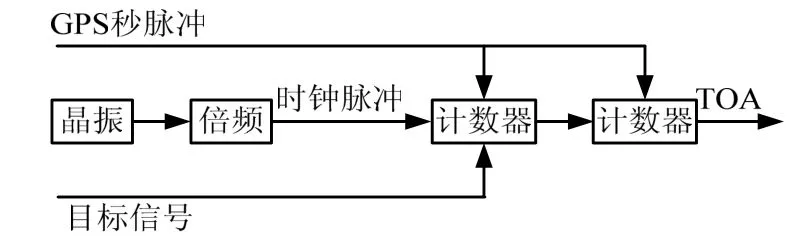
圖1 目標信號TOA測量原理
1 影響TOA測量準確度因素分析與TOA測量校正
1.1 晶振頻率漂移對TOA測量的影響

然而實際晶振輸出的時鐘脈沖存在著頻率偏移,即實際時鐘脈沖頻率為,這里Δf為隨時間變化的隨機量,脈沖周期為。若目標信號真實 TOA為toaT,則計數(shù)器實際計數(shù)值為:


可見,由于時鐘頻率偏移,使得TOA測量值相對真實值產生了偏移。實際中如果能估計頻率偏移量fΔ,則可以修正TOA測量值為:

設 GPS秒脈沖嚴格以 TG=1 s的時間間隔發(fā)送,則收到脈沖信號時,對標準頻率為 f0的時鐘脈沖,計數(shù)器的計數(shù)值為 N0= f0,對頻率為 f = f0+Δ f 的時鐘脈沖,計數(shù)器的計數(shù)值為 N = f0+Δf 。利用收到GPS秒脈沖時計數(shù)器的計數(shù)值對頻率偏移Δf進行估計,有:

代入式(4),得到目標信號TOA的修正值:

這里,Ttoa′是目標信號到達時計時器的計時值,Gtoa是GPS秒脈沖到達時計時器的計時值。因此,當測時時間脈沖存在頻率偏移時,可以利用收到GPS秒脈沖時計時器的值對目標信號TOA測量進行校正。
1.2 GPS秒脈沖抖動對TOA測量的影響
對因時鐘頻率偏移引起的TOA測量誤差進行校正時,假設了GPS秒脈沖嚴格以的時間間隔發(fā)送,然而實際的GPS秒脈沖存在抖動(即使非常小)[1]。設GPS秒脈沖以時間間隔發(fā)送,這里tδ是很小的隨機量,則對標準頻率為0f的時鐘脈沖,計數(shù)器的計數(shù)值為:


于是利用收到GPS秒脈沖時計數(shù)器的計數(shù)值對頻率偏移fΔ的估計為:利用式(4),得到目標信號TOA的修正值為


由此可見,同時考慮晶振頻率偏移與GPS秒脈沖抖動時,對目標信號TOA的測量值應根據(jù)收到GPS秒脈沖時計時器的計時值Gtoa與GPS秒脈沖抖動tδ利用式(10)進行修正。然而實際中tδ無法準確測量,這樣只能用:

進行修正。由此引入的絕對誤差為:
由式(12)可見,當GPS秒脈沖抖動tδ一定時,Ttoa′越小,即目標信號到達時間相對下一個GPS秒脈沖到達時間越早,由式(11)進行TOA修正引入的誤差越小。

2 基于Kalman濾波的TOA測量校正
引起晶振實際頻率相對標準頻率發(fā)生偏移的因素很多,包括切片工藝、工作環(huán)境、溫度變化、電壓變化等,因此實際晶振輸出時鐘脈沖頻率相對給定標準頻率的偏移fΔ是一個隨機過程,且實際當中無法測量的GPS秒脈沖抖動tδ也是一個隨機過程。根據(jù)式(8)有:

因此收到GPS秒脈沖序列時,計時器的計時值序列Gtoa可以認為是一個非平穩(wěn)隨機過程[2]。為了對目標信號TOA測量進行校正,需要跟蹤并預測GPS秒脈沖到來時Gtoa的變化情況,而跟蹤并預測Gtoa的變化,采用Kalman濾波是一種很好的方式[3-5]。
由于觀測到的Gtoa序列是標量時間序列,且沒有外加激勵,因此采用標量差分方程表示系統(tǒng)狀態(tài)模型(為表示方便,以z代替Gtoa):

這里過程噪聲 wk可以認為主要是 GPS秒脈沖抖動,wk~ N ( 0 ,Q ),觀測噪聲 vk主要是計時精度限制引入的量化噪聲,,其方差因此,這種情況下Kalman濾波只能得到“準最佳”估計。
Kalman濾波的狀態(tài)更新方程為:

測量更新方程為:
利用Kalman濾波,跟蹤并預測Gtoa的變化,并利用式(11)的修正關系,即可動態(tài)地對目標信號TOA測量的誤差進行補償,提高TOA測量的準確度。
3 數(shù)值仿真
直接利用實際數(shù)據(jù)驗證上面導出的TOA修正算法需要采集很長時間的數(shù)據(jù),并且系統(tǒng)其它噪聲可能會掩蓋算法修正效果,因此采用數(shù)值仿真的方法分別驗證上述兩部分算法的有效性。實際中目標信號TOA測量通常以ns為單位,這里也統(tǒng)一以 ns為單位(為避免繪圖時坐標范圍太大,部分圖例采用其它時間單位坐標刻度)。
3.1 TOA測量校正
直接對時間頻率偏移引起 TOA測量誤差的校正算法進行數(shù)值仿真驗證,難于確定一個評估標準,因此采用間接驗證的方法:設有兩個遠端接收站,一個與這兩個接收站距離相等的目標,則當兩接收站完全同步,并且兩站時間脈沖具有完全相同的頻率時,測量到目標信號到達兩接收站的時間差(Time Difference of Arrival,TDOA)應該為0;若兩個接收站時鐘脈沖頻率存在不同的偏移,則測量到的TDOA不為0。
于是,可以通過驗證對兩站測量到的 TOA進行校正后TDOA的改善來評估算法的有效性。實驗參數(shù)設置為:時鐘脈沖標準頻率f0=100 MHz,;GPS秒脈沖抖動 δ t=20 ns (修正 TOA時假設未知);接收站 1的實際時鐘脈沖頻率f1=99.99999 MHz,接收站 2的實際時鐘脈沖頻率f1=100.00001 MHz;設兩個遠端接收站經GPS秒脈沖同步后,目標每隔50 ms發(fā)送一次信號,忽略晶振短穩(wěn)與計時器量化誤差。
實驗結果如圖2~7所示,其中圖2~4是未經TOA校正的結果(與實際設備測試的結果很接近),圖5~7是經TOA測量校正的結果。顯然,經過校正后,TDOA值已基本為0,證實了TOA測量校正算法是很有效的。下頁圖8~9為兩接收站TOA測量校正值與實際TOA值的誤差,證實了當GPS秒脈沖抖動δt一定時,toaT′越小,即目標信號到達時間越早,由式(11)進行TOA修正引入的誤差越小的結論。
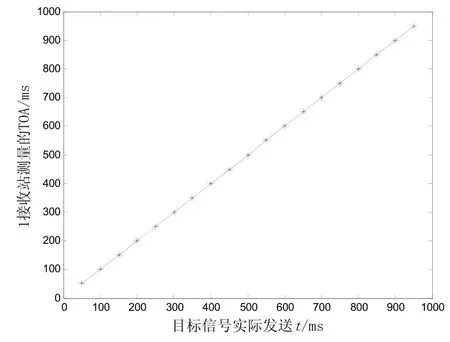
圖2 1接收站測量的TOA(未經校正)
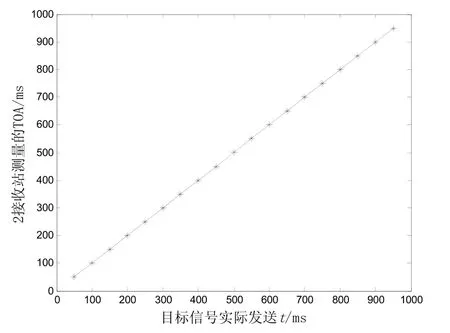
圖3 2接收站測量的TOA(未經校正)
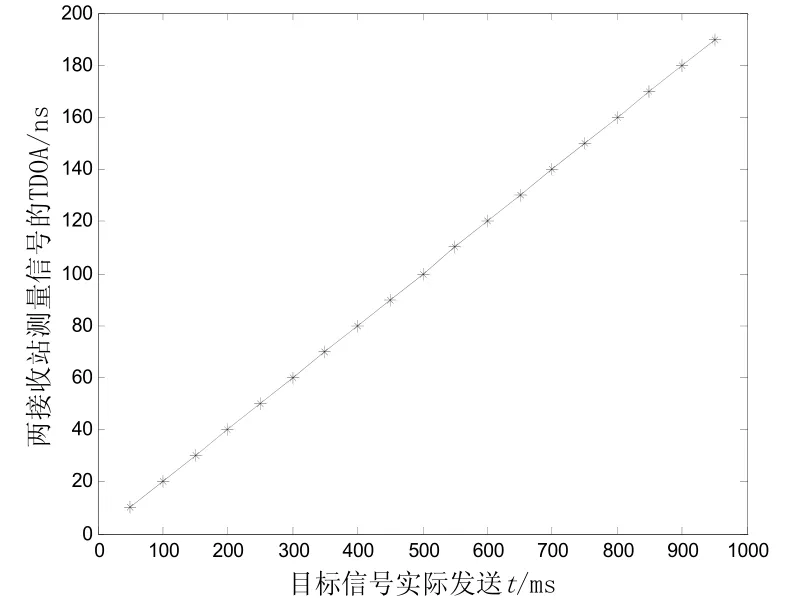
圖4 兩接收站測量信號的TDOA(未經校正)
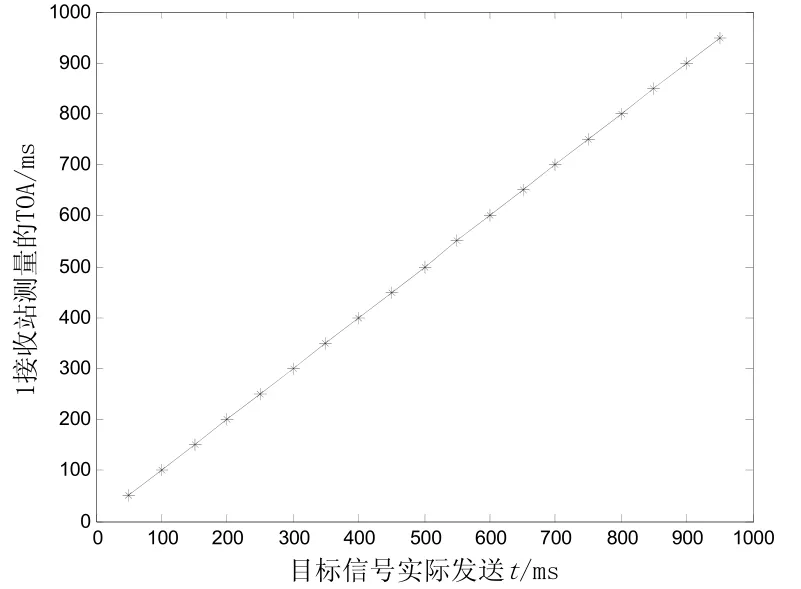
圖5 1接收站測量的TOA(已經校正)

圖6 2接收站測量的TOA(已經校正)
3.2 時鐘頻率變化的Kalman濾波跟蹤
由于實際晶振的頻率漂移是慢變化過程,因此可設式(14)中的參數(shù)A=1。設時鐘脈沖的標準頻率f0=100 MHz,在600 s時間內時鐘頻率的漂移如圖10所示;GPS秒脈沖抖動計時器量化誤差模擬出600 s內接收到GPS秒脈沖時計時器未標絕對時標的測量數(shù)據(jù)值如圖11所示,圖11中還繪出了由Kalman濾波得到的測量數(shù)據(jù)的先驗估計值(預測值)與后驗估計值。圖12、13為先驗估計值、后驗估計值與測量數(shù)據(jù)間的誤差。從圖13所示結果可以看出,利用Kalman濾波估計出的計時值與實際值非常接近,即利用Kalman濾波可以很好地跟蹤GPS秒脈沖到來時計時器測量值的變化;而從圖12結果可看出,Kalman濾波通過跟蹤數(shù)據(jù)中時鐘頻率漂移的趨勢,提供了誤差主要取決于GPS秒脈沖抖動的測量數(shù)據(jù)的較好預測,該預測值將用于目標信號TOA的測量校正。雖然參數(shù)Q與R的選擇直接影響到濾波效果,實際中需要仔細選擇[7],但這里數(shù)值仿真的條件與參數(shù)設置都盡可能反映實際系統(tǒng)工作情況,并且因為實際晶振的頻率漂移比仿真設置的還要緩慢,因此可以預料此方法運用于實際系統(tǒng)中也能取得較好的效果。
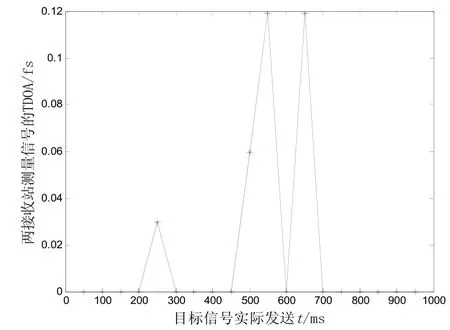
圖7 兩接收站測量信號的TDOA(已經校正)
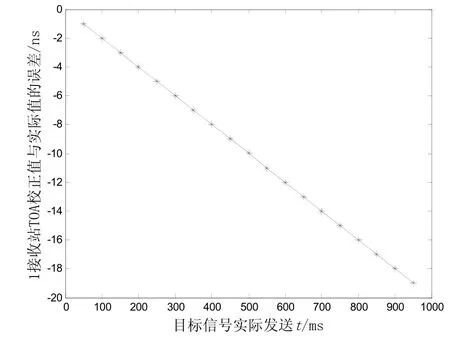
圖8 1接收站TOA校正值與實際值的誤差
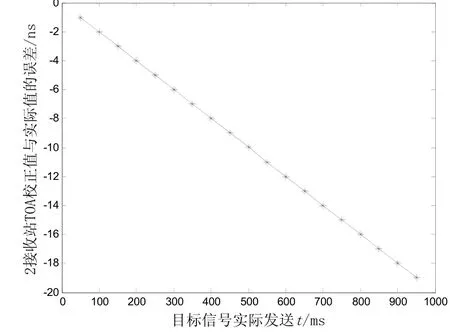
圖9 2接收站TOA校正值與實際值的誤差
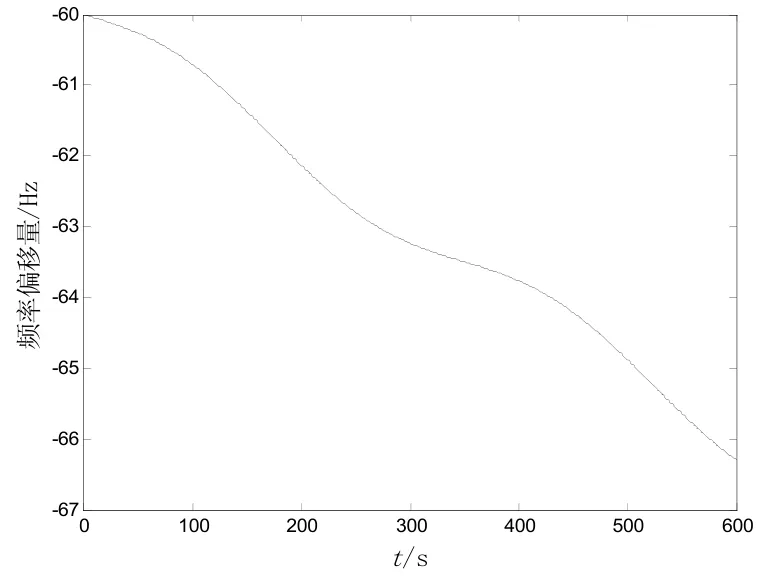
圖10 時鐘脈沖頻率漂移特性
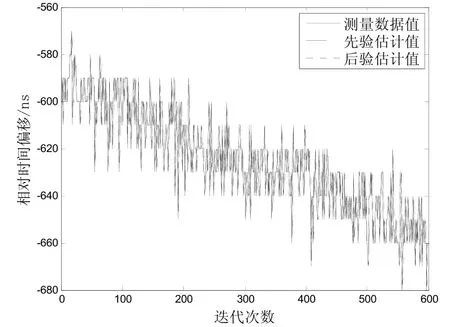
圖11 時間測量值與估計值
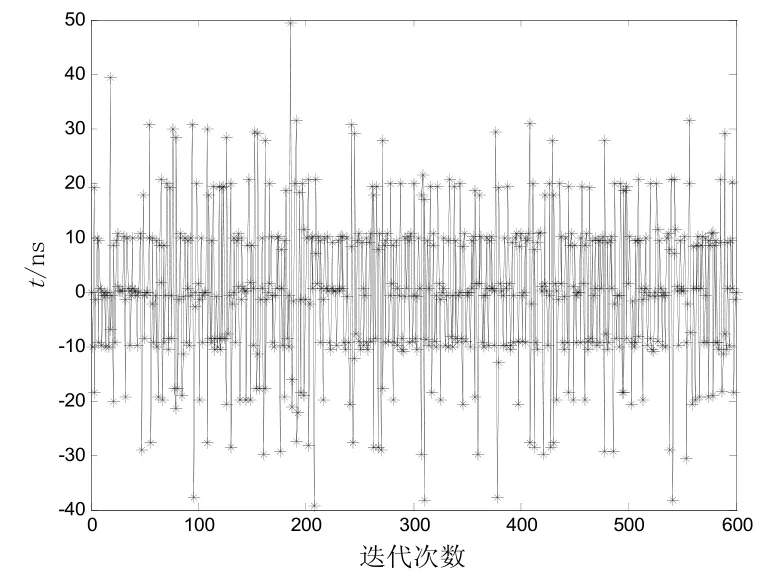
圖12 先驗估計誤差
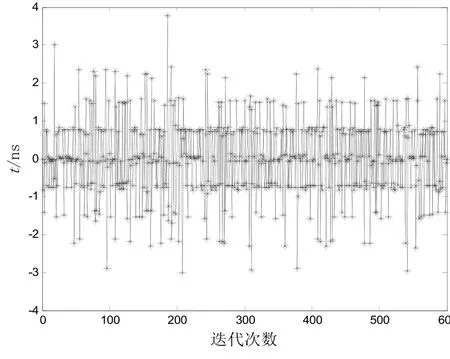
圖13 后驗估計誤差
綜合兩部分仿真結果所顯示的算法性能,可見對于多點定位系統(tǒng)遠端站測量目標信號TOA時存在的時鐘脈沖頻率偏移問題,運用Kalman濾波估計GPS脈沖到達時間并利用該估計值修正目標信號TOA測量值的方法,可以改善目標信號TOA的測量準確度,具有較強的現(xiàn)實意義與實用價值。
4 結語
針對多點定位系統(tǒng)遠端站測量目標信號 TOA的實際問題,分析了晶振頻率偏移和GPS秒脈沖抖動對TOA測量準確度的影響,導出了TOA測量校正方法。通過利用Kalman濾波,估計GPS脈沖到達時間并利用該估計值修正因時鐘脈沖頻率漂移導致的目標信號TOA測量誤差。數(shù)值仿真證明此方法可以有效地改善目標信號TOA的測量準確度,對多點定位系統(tǒng)具有很現(xiàn)實的實用價值。
[1] [美]Kaplan E D,Hegarty C J.GPS原理與應用[M].第 2版.寇艷紅譯.北京:電子工業(yè)出版社,2007:44-45,224-239.
[2] 王永德,王軍.隨機信號分析基礎[M].第3版.北京:電子工業(yè)出版社,2009:37-72.
[3] Grewal M S,Andrews A P.Kalman Filtering Theory and Practice Using MATLAB, Second Edition[M]. New York :John Wiley & Sons,Inc.,2001:114-164.
[4] Simon D.Optimal State Estimation-Kalman, H∞, and Nonlinear Approaches[M]. Hoboken :John Wiley & Sons,Inc.,2006:123-325.
[5] Chui C K,Chen G.Kalman Filtering-with Real-Time Applications,Fourth Edition[M]. Berlin, Heidelberg:Springer-Verlag,2009:20-28.
[6] Haykin S.Communication System, Fourth Edition[M].New York :John Wiley & Sons,Inc.,2001:193-201.
[7] Welch G, Bishop G.An Introduction to the Kalman Filter[M]. Los Angeles:CA,2001:35.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
