一種自適應TIN 迭代加密濾波算法
2010-08-06 10:26:52薛曉濱盧建康
鐵道勘察 2010年4期
殷 飛 齊 華,2 薛曉濱 盧建康
(1.西南交通大學信息科學與技術學院,四川成都 610031;2.西南交通大學土木工程學院,四川成都 610031;
3.中鐵二院工程集團有限責任公司信息中心,四川成都 610031;
4.中鐵二院工程集團有限責任公司測繪分院,四川成都 610031)
機載激光雷達測量(Light Detection and Ranging)技術是近些年快速發展起來的一種空間信息獲取技術,能夠快速高效地獲取數字地表三維模型。目前,LiDAR系統硬件技術發展得比較成熟,大部分屬于硬件及系統集成方面的問題已得到解決。但數據后處理技術卻發展相對滯后[1],主要包括濾波分類、地物提取、三維重建及海量點云數據簡化。“十一五”期間,國家863計劃地球觀測與導航技術領域也開始進行LiDAR數據后處理方面的研究[7]。
機載激光雷達系統采集到的原始數據點離散分布于三維空間,這些點可能打到真實地表面,也有可能打到植被或人工建筑物等地物表面。為了從點云數據中得到數字高程模型,需要分離地面點和地物點,即Li-DAR數據濾波。作為LiDAR數據后處理最為重要的組成部分之一,濾波結果直接影響所生成DEM(Digital Elevation Model)的質量,也是進行地物提取與三維重建的必要前提。
如何實現由LiDAR數據快速、準確地提取出地面點,一直是國內外專家學者們研究的重點、難點和熱點之一。出于商業方面的考慮,現有的幾種商業軟件其數據處理算法都不對用戶公開。
1 濾波原理及方法回顧
LiDAR數據濾波的原理基于高程突變,即鄰近的兩個激光點間高程變化較大時,一般認為不是由于地形的陡然起伏所造成的,更為可能是由于地面存在地物而引起,高程較大的點很可能是地物點。若兩點間的距離越近,高差越大,較高的點更有可能為地物點。故判斷某點是否地面點時,要考慮該點到參考地面點的距離。隨著兩點間距離的增加,其高差也會變大[6]。
迄今為止,國內外的專家學者對濾波算法進行了深入研究。最簡單的濾波算法認為一定區域內高程最低的點即為地面點;該算法基于平坦地形,誤差較大。德國斯圖加特大學的Lindenberger提出了數學形態學濾波算法,對LiDAR數據進行形態開運算并利用自回歸過程改善開運算的結果[4]。奧地利維也納大學的Kraus和Pfeifer提出了迭代線性最小二乘內插濾波算法,根據計算得到的殘差值給每一個激光點賦權值,由此分離出地面點[3]。Vosselman提出了基于坡度的濾波算法,根據最大坡度 γ和垂直測量精度 σz確定高差閾值函數[6]。Axelsson提出了三角網迭代加密濾波算法,通過不斷向三角面加入滿足高差閾值和角度閾值的激光點,達到重建地表面的目的[2]。武漢大學張小紅提出了移動曲面擬合濾波算法,用二次曲面去擬合空間曲面,擬合值與原始值間高差小于閾值則視為地面點[8]。
目前還沒有哪一種濾波算法對任意地形的處理結果都很完美。Sithole通過實驗分析了8種典型濾波算法,指出各種算法都存在一定的問題[5]。本文通過研究三角網迭代加密濾波算法,提出了一種改進方法。
2 濾波算法
數據處理過程中,若將原始離散激光點云內插為規則格網DSM(Digital Surface Model)格式,雖然可以引入成熟的圖像處理算法,但勢必會引入誤差,另外數據的精度也會降低。在原始LiDAR數據中,相同的平面坐標可以對應多個不同高程值的激光點。以規則格網DSM表示時,一對X、Y坐標只能對應一個高程值。因此,認為規則格網表示方式會在一定程度上丟失數據原有的某些屬性,本文選擇對基于離散點的三角網迭代加密法進行改進。
Axelsson提出的三角網迭代加密濾波算法思想:首先對測區進行分塊處理(分塊大小以測區地物最大長度為準),初始點選擇地面上一些高程較低的點,然后選取每塊中的最低點作為初始地面點并建立不規則三角網模型。定位待判斷點P對應的三角形,P及其在三角面上的投影點與三角形頂點間的角度分別記為α、β、γ,P到三角面的垂直距離記為d。若 α、β、γ和 d都小于設定的閾值,則接受該點為地面點并重新建立三角網(見圖1)。接著判斷下一個點,直到所有的點都被分為地面點或非地面點。通過不斷地加入滿足條件的激光點來擴大地面模型,每加入一個新點都更新不規則三角網,最終得到非常接近地表面的三角網模型[2]。
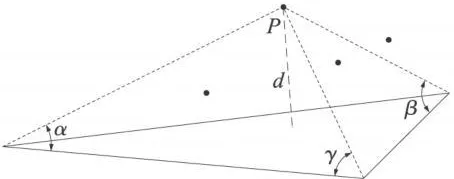
圖1 濾波算法參數示意
經研究,該算法存在的主要缺點有:
①該算法假定一定區域內高程最低的點為地面點,此時如果存在低于地面的點,則會錯誤分類到地面點類,因此需要先分離低點。此外,沒有考慮空中噪點對濾波算法的影響。
②參數值不能隨著地形自適應改變。在絕對理想的平地區域,各激光點的高差為0,若此時的高差閾值還取一固定值,不可避免錯誤地將地物點分類為地面點。此外,陡坡邊緣的點可能被錯誤分類為地物點。
針對上述問題,本文對該算法作了以下改進,算法流程見圖2。
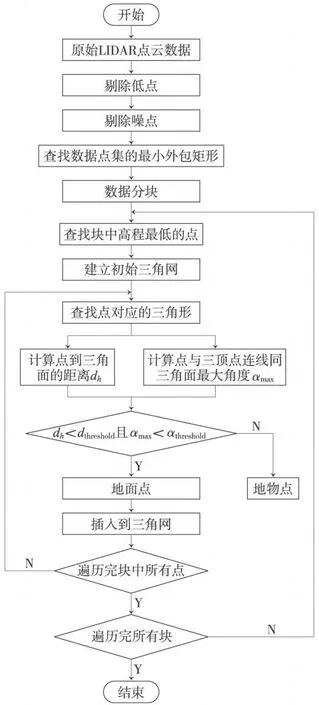
圖2 算法流程
(1)對原始激光點云數據進行預處理,剔除錯誤點,包括低點、噪點等。
剔除單個低點:
若某一個點為低點,則其高程值與領域內其他點的高差都應滿足一定的高差閾值。設待判斷點為Pa,以Pa為中心點,搜索一定鄰域范圍內的其他激光點,若對鄰域內任意激光點P都有ZPa-ZP<-H,H為設置的高差閾值,則可判斷Pa為低點。用數學形式表達為:對于激光點云集P,若其鄰域內任一點滿足:PT={Pa∈P|?Pr∈Pn:ZPa-ZP<-H},則判斷 Pa為低點 。
剔除低點簇:
若某點的鄰域內幾個連續點均為低點,則其高程與內插高程之差應滿足一定的高差閾值。設低點簇中的某個待判斷點為Pa,以Pa為中心點,搜索一定鄰域范圍內的其他激光點并進行插值,其內插高程為Pi,若ZPa-ZPi<-H,H為設置的高差閾值,則可判斷Pa為低點(見圖2)。該方法也可用于剔除單個低點。
本文提到的噪點專指空中點,噪點不僅會影響數據瀏覽,還會影響濾波算法的使用,所以應先剔除這些點。由于這些點的高程與周圍點高程相比突變較大,一般可以通過設置絕對高程閾值去除。
(2)對測區分塊并建立虛擬格網索引,取每一塊中高程最低的點PL作為種子點。查找塊的凸包并將PL的高程賦給邊界點,由凸包與PL建立初始三角網,此時所有三角形位于同一平面。根據測區情況設置初始高差閾值。
(3)分塊時保證各塊間有一定程度的重疊。
(4)高差閾值設置為自適應函數。

式中 α——待判斷點對應三角形的坡度;
d——激光點的平均間距;
σz——輸入的常數。
3 濾波實驗及分析
3.1 濾波實驗
為了有針對性地比較濾波算法,特地選擇了兩塊典型區域的數據進行濾波實驗。
實驗數據1為某城區實測LiDAR數據,數據區域為長方形,測區面積為250 m ×250 m,原始文件5.68 M,點數為213093個,平均間距約0.77 m,密度約3.4個/m2。原始數據中包含有低點,該區域地形平坦,建筑物較多且復雜,地物主要為植被、汽車、房屋、橋梁等,見圖 3(a)。
實驗數據2為某森林區域實測LiDAR數據,測區面積為146 m ×80 m,原始文件1.57M,點數為58 894個,平均間距約0.46 m,密度約5個/m2。該區域地形平坦,地物主要為植被,見圖3(b)。
由圖4(a)、圖4(b)可看出,改進后算法剔除了錯誤點、小汽車等近地點。同時有少數面積較小的房屋未過濾,形成小的突起,房屋邊緣的過濾效果不是很理想。此外有部分道路點被錯誤分類為地物。
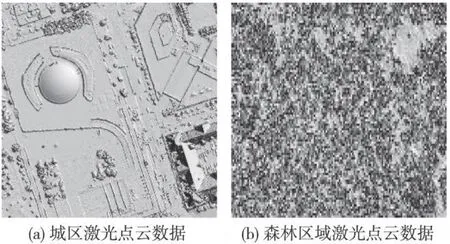
圖3 實驗數據
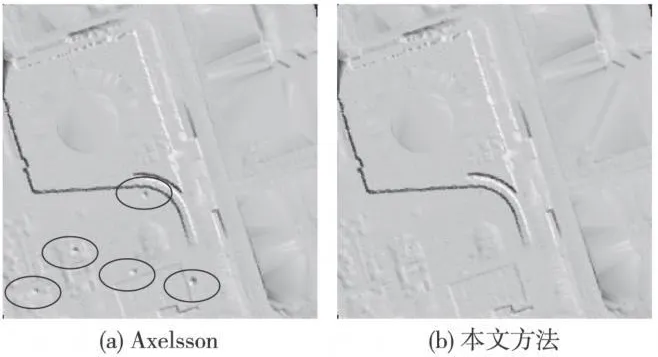
圖4 城區濾波結果暈渲圖
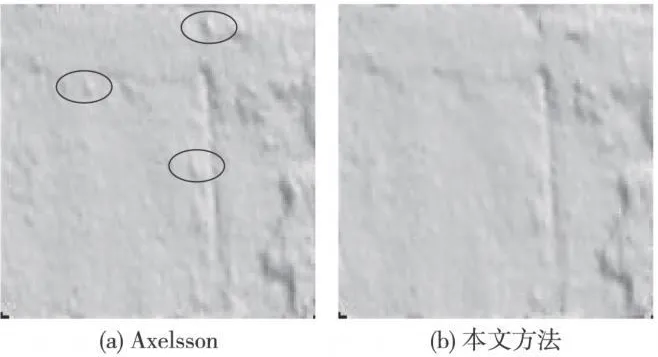
圖5 森林區域濾波結果暈渲圖
由圖5(a)、圖5(b)可看出,森林區域采用改進后算法處理的結果過濾了大部分植被,但仍有少數極低的灌木點錯誤分類為地面點,同時將部分地面點錯誤分類了地物點。
3.2 濾波難點分析
機載激光雷達數據濾波結果與激光點的密度、測區地形和地物的復雜程度都有很大關系。一般情況下,大多數濾波算法都能夠處理地形、地物不復雜的區域,如平原、城市、稀疏的樹林等。從工程實踐可知:困難區域的處理是一個難點。因此,能否準確對任意復雜地形、地物進行濾波處理是評價濾波算法優劣的一個重要指標。為了定性分析濾波算法,特選取幾處濾波難點,包括錯誤點、復雜地物、附著地物、植被(低矮植被和坡面上的植被)等(如表1)。
3.3 定量分析
ISPRS組織第Ⅲ委員會第三工作組于2004年發布了濾波方法比較報告,文章中將濾波誤差分為兩類。第Ⅰ類誤差:將地面點錯誤分類為地物點;第Ⅱ類誤差:錯誤接收地物點并歸入地面點[5]。
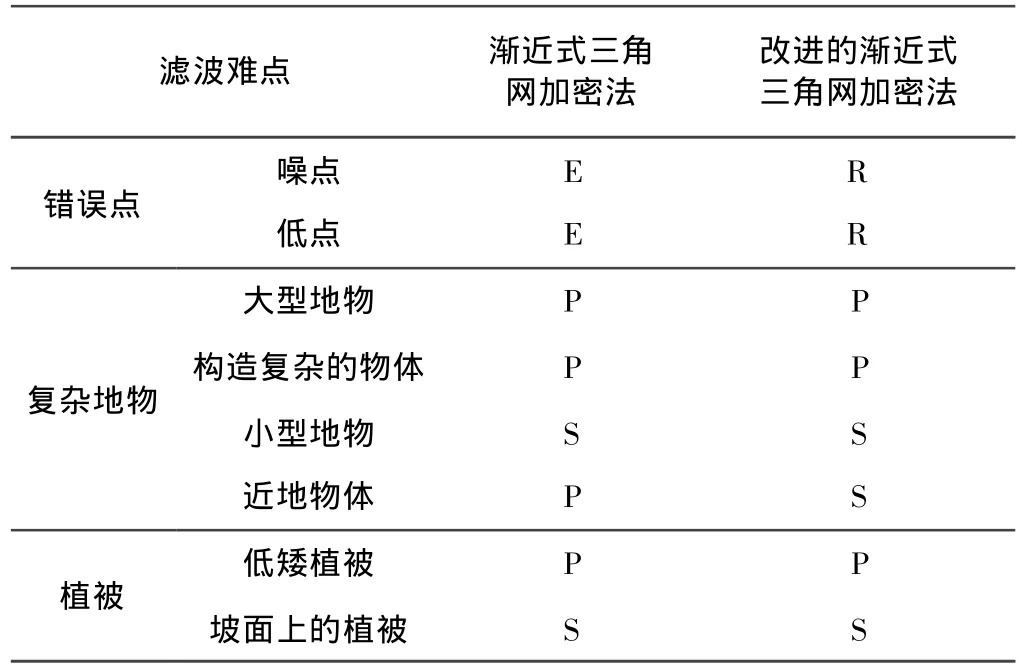
表1 濾波實驗定性比較
第Ⅰ類誤差:

第Ⅱ類誤差:

總誤差:

式中 a——正確標識為地面點的數目;
b——錯誤分類為地物點的數目(由于第Ⅰ類誤差產生);
c——錯誤分類為地面點的數目(由于第Ⅱ類錯誤產生);
d——正確分類為地面點的數目。濾波算法考慮最小化第Ⅱ類誤差,即應剔除盡量多的地物點,當地物很小或很貼近地表面時,甚至可以剔除部分真實地面點。其原因是第Ⅱ類誤差對DEM質量的影響比第Ⅰ類誤差要大(如表2、表3所示)。
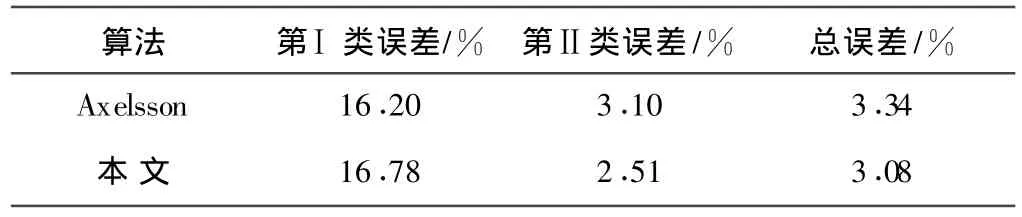
表2 數據1濾波結果定量比較
三角網迭代加密算法將部分低矮植被點和近地點錯誤分類為地面點,導致第Ⅱ類誤差較大。改進后采用坡度閾值函數,有效剔除了低植被點,處理結果的第Ⅱ類誤差減小,總誤差有一定程度減小。同時由于剔除了部分真實地面點,導致第Ⅰ類誤差變大。
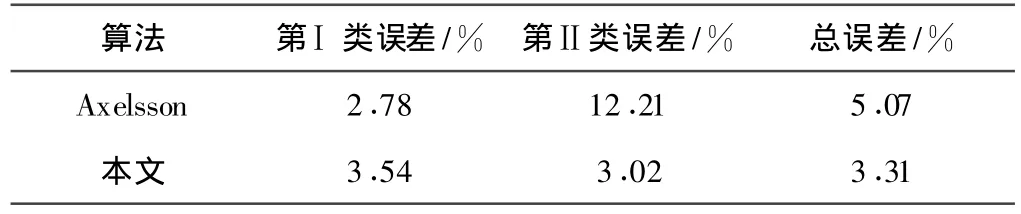
表3 數據2濾波結果定量比較
4 結論
通過研究三角網迭代加密濾波算法,提出了一種改進方法。在濾波處理前先剔除錯誤點,以降低其對后續算法的影響。針對不同地形情況的參數設置是一個難點,提出了根據三角形坡度建立自適應閾值函數的方法,并選擇兩塊典型區域數據驗證了改進后濾波算法的可行性。實驗證明:該方法能夠有效處理Li-DAR數據,剔除錯誤點和近地點并得到DEM數據,且第Ⅱ類誤差、總誤差相對減小。但是過濾小面積房屋的效果不是很好,可以考慮結合回波信息進行處理。此外,由于LiDAR數據是海量數據,本算法中又涉及動態構建不規則三角網,其時間復雜度較高。因此,選擇速度較快的構網方法是降低濾波時間復雜度的關鍵。
[1]Axelsson P.Processing of laser scanner data-algorithmsand applications.ISPRSJournal of Photogrammetry and Remote Sensing,1999,54:138-147
[2]Axelsson.DEM generation from laser scanner data using adaptive TIN models.International Archives of Photogrammetry and Remote Sensing,2000,33(B4):110-117
[3]Kraus K,Pfeifer N.Determination of terrain modelsin wooded areas with airborne laser scanner data.ISPRS Journal of Photogrammetry and Remote Sensing,1998,53:193-203
[4]Lindenberger J.Laser-profilmessungen zur topographischen gelandeaufnahme. Verlag der Bayerischen Akademie der Wissenschaften,1993
[5]Sithole G,Vosselman,G.Experimental comparison of filter algorithms for bare-Earth extraction from airborne laser scanning point clouds.ISPRS Journal of Photogrammetry and Remote Sensing,2004,59:85-101
[6]Vosselman G.Slope based filtering of laser altimetry data.IAPRS,2000,33(B3/2):935-942
[7]科技部.863計劃地球觀測與導航技術領域2006年度專題申請指南[R].北京:科技部,2006
[8]張小紅.機載激光雷達測量技術理論與方法[M].武漢:武漢大學出版社,2007
