基于Wigner-Ville分布的高動(dòng)態(tài)頻率跟蹤算法
2010-08-06 09:27:36趙海龍
通信技術(shù) 2010年3期
趙海龍, 張 健, 周 劼, 黃 強(qiáng)
(中國(guó)工程物理研究院電子工程研究所,四川 綿陽(yáng) 621900)
0 引言
頻率的跟蹤是載波同步中的一項(xiàng)關(guān)鍵技術(shù),在低動(dòng)態(tài)環(huán)境中,由于載體機(jī)動(dòng)造成的多普勒頻率較小,接收機(jī)一般采用鎖相環(huán)(PLL)來(lái)進(jìn)行頻率與相位跟蹤。而高動(dòng)態(tài)環(huán)境具有較高的速度、加速度和加加速度,導(dǎo)致多普勒頻率很大[1],由于跟蹤精度和環(huán)路帶寬之間的矛盾,所以傳統(tǒng)的鎖相環(huán)已經(jīng)無(wú)法可靠的跟蹤。
針對(duì)高動(dòng)態(tài)環(huán)境下頻率跟蹤的問(wèn)題目前主要有兩種解決方案,一是為接收機(jī)提供慣導(dǎo)系統(tǒng)進(jìn)行速率輔助,另一種是研究適合高動(dòng)態(tài)環(huán)境的頻率估計(jì)算法,然后將算法嵌人到接收機(jī)內(nèi)的信號(hào)處理部分。其中,后一種方案由于具有體積小、成本低與結(jié)構(gòu)簡(jiǎn)單等特點(diǎn)而得到廣泛應(yīng)用。針對(duì)第二種方案,美國(guó)噴氣動(dòng)力實(shí)驗(yàn)室(JPL)的Vilnrotter,H inedi與Kumar等人分析了一些高動(dòng)態(tài)環(huán)境下的GPS頻率估計(jì)算法[2-3],主要涉及的算法有最大似然估計(jì)(MLE)、擴(kuò)展卡爾曼濾波(EKF)、自動(dòng)頻率控制環(huán)(AFC)和自適應(yīng)最小均方法(ALS)。
本文從時(shí)頻分析的角度出發(fā),提出了一種基于Wigner-Ville分布(WVD)的高動(dòng)態(tài)頻率跟蹤算法。利用WVD估計(jì)瞬時(shí)多普勒頻率來(lái)輔助載波跟蹤環(huán)路,從而提高了跟蹤的動(dòng)態(tài)范圍與頻率估計(jì)精度。
1 高動(dòng)態(tài)GPS載波相位模型
設(shè)GPS天線接收的C/A碼信號(hào)經(jīng)過(guò)下變頻成為中頻信號(hào),并假定信號(hào)已經(jīng)解擴(kuò),則信號(hào)模型為[2]:

其中,ωI為中頻頻率,A為幅度(假定為常數(shù)1),D(t)=±1為調(diào)制數(shù)據(jù),n (t)為平穩(wěn)的零均值,單邊功率譜密度為 N0的高斯白噪聲,θ(t)為高動(dòng)態(tài)相位過(guò)程,采用泰勒級(jí)數(shù)展開(kāi),可表示為[2]:

所以信號(hào)的瞬時(shí)頻率為:

其中,0θ為載波初始相位,0ω為相位一階導(dǎo)數(shù),1ω為相位二階導(dǎo)數(shù),2ω為相位三階導(dǎo)數(shù)。
為了方便計(jì)算信號(hào)的瞬時(shí)多普勒頻率,式(1)中的 ()rt信號(hào)可通過(guò)正弦波混頻將載頻去除并變換為解析形式,其表達(dá)式為:

2 Wigner-Ville分布理論
從式(2)中可以看出,相位過(guò)程()tθ是一個(gè)時(shí)變信號(hào),所以可以將其理解為非平穩(wěn)信號(hào)。而WVD是一種分析非平穩(wěn)信號(hào)的有效工具,它是具有雙線性形式的時(shí)頻分布。為了抑制交叉項(xiàng),人們提出了加窗WVD,即偽WVD(PWVD)的實(shí)現(xiàn)方案,PWVD計(jì)算公式為[4]:

其中, ()wl為窗函數(shù)。為了抑制鏡像頻率的相互影響而產(chǎn)生交叉項(xiàng),輸入信號(hào) ()xn一般要變換為解析形式。PWVD可采用FFT來(lái)計(jì)算。
3 基于WVD的跟蹤算法
3.1 基于WVD的跟蹤算法結(jié)構(gòu)
在低動(dòng)態(tài)環(huán)境下,GPS接收機(jī)中通常采用科思塔斯環(huán)[5](Costas)進(jìn)行頻率跟蹤。但是在高動(dòng)態(tài)環(huán)境下,由于多普勒頻移很大,若單純采用鎖相環(huán),必須增大環(huán)路帶寬,而增大環(huán)路帶寬又會(huì)進(jìn)入大量噪聲,使信噪比下降。所以可采用如圖1所示的基于WVD的跟蹤算法,利用WVD多普勒頻率估計(jì)器估計(jì)信號(hào)的瞬時(shí)頻率來(lái)輔助科思塔斯環(huán)。
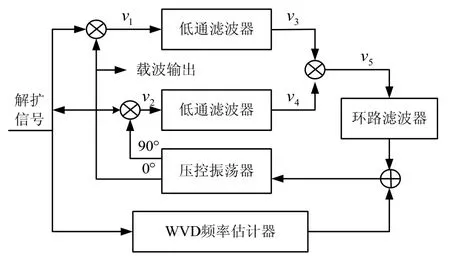
圖1 基于WVD的算法結(jié)構(gòu)
3.2 WVD頻率估計(jì)器
WVD頻率估計(jì)器是算法的核心,它首先通過(guò)式(5)計(jì)算式(4)中 z(t)的PWVD,計(jì)算時(shí)為了避免調(diào)制數(shù)據(jù) D (t)的影響,可通過(guò)數(shù)據(jù)跳變檢測(cè)算法[6],保證每次計(jì)算WVD的z(t)信號(hào)在一個(gè)符號(hào)周期內(nèi)。得到 z(t)的PWVD后,然后采用峰值檢測(cè)算法來(lái)確定其瞬時(shí)多普勒頻率。峰值檢測(cè)算法是搜索n時(shí)刻頻率k中最大的 p w(n,k), p w(n,k)通過(guò)式(5)計(jì)算得到,即為該時(shí)刻的瞬時(shí)多普勒頻率。實(shí)際系統(tǒng)中由于pw(n,k)的計(jì)算會(huì)產(chǎn)生延時(shí),假定延時(shí)為m。此時(shí),n時(shí)刻的多普勒頻率應(yīng)該為n - m 時(shí)刻搜索到的峰值。
4 仿真分析
計(jì)算機(jī)仿真中采用JPL實(shí)驗(yàn)室定義的高動(dòng)態(tài)模擬環(huán)境[2],其接收機(jī)速度軌跡見(jiàn)圖2(a)。接收機(jī)動(dòng)態(tài)含有正的和負(fù)的加加速度脈沖,其脈沖持續(xù)時(shí)間為0.5 s,幅度為100 g/s,如圖2(b)所示。加速度的初始值定為-25 g,速度的初始值定為-100 m/s,載波頻率定為L(zhǎng)1波段的1.575 GHz。( 9.8g=2m/s)
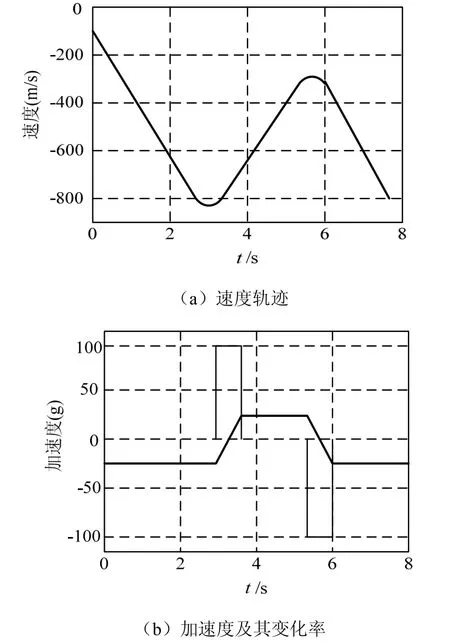
圖2 計(jì)算機(jī)模擬的高動(dòng)態(tài)軌跡模型
根據(jù)軌跡模型,結(jié)合式(3)可以計(jì)算出每個(gè)時(shí)刻多普勒頻率的理論值dω。在0~3 s時(shí)段,載體作恒定加速度運(yùn)動(dòng),在3 s時(shí)刻載體速度達(dá)到最大,將此時(shí)刻對(duì)應(yīng)的多普勒頻率歸一化為0.45 Hz,則可以計(jì)算0秒時(shí)刻的歸一化多普勒頻率為0.0539 Hz。在3~3.5 s時(shí)段,載體不但存在加速度,而且存在加加速度,可以將多普勒頻率理解為拋物線調(diào)頻信號(hào)。此時(shí)段最大歸一化多普勒頻率為0.4 665 Hz,其對(duì)應(yīng)時(shí)刻為3.25 s。3 s與3.5 s時(shí)刻的歸一化多普勒頻率都為0.45 Hz。其他時(shí)段類似,這里不再討論。
下頁(yè)圖3與圖5分別給出了在沒(méi)有噪聲干擾情況下兩個(gè)時(shí)段多普勒頻率的理論計(jì)算曲線與WVD頻率估計(jì)曲線。從圖中可以看出,兩條曲線幾乎重合。圖4與圖6分別給出兩個(gè)時(shí)段對(duì)應(yīng)的誤差曲線,其中ω?d為WVD的多普勒頻率估計(jì)值,ωd為理論計(jì)算值)。圖7與圖8示出了不同信噪比下的誤差曲線。可以看出,當(dāng)信噪比大于0 dB時(shí),誤差趨于一個(gè)很小的值。
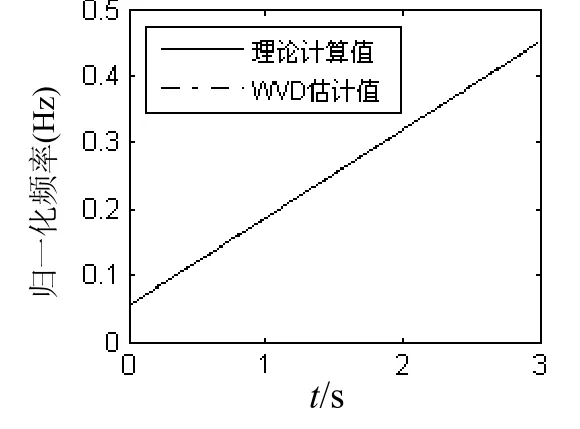
圖3 頻率與時(shí)間曲線(0~3 s時(shí)段)
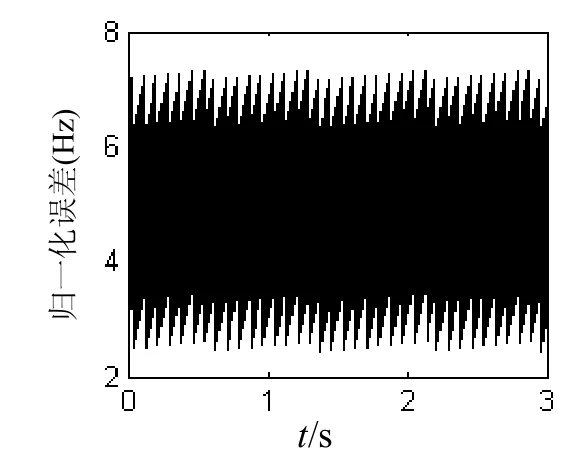
圖4 誤差與時(shí)間曲線(0~3 s時(shí)段)
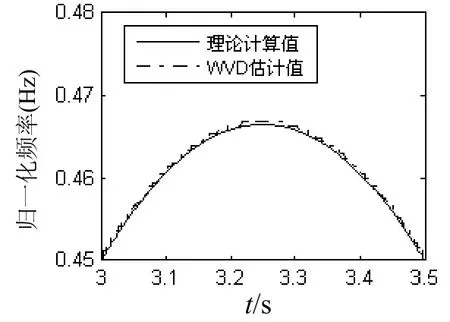
圖5 頻率與時(shí)間曲線(3~3.5 s時(shí)段)
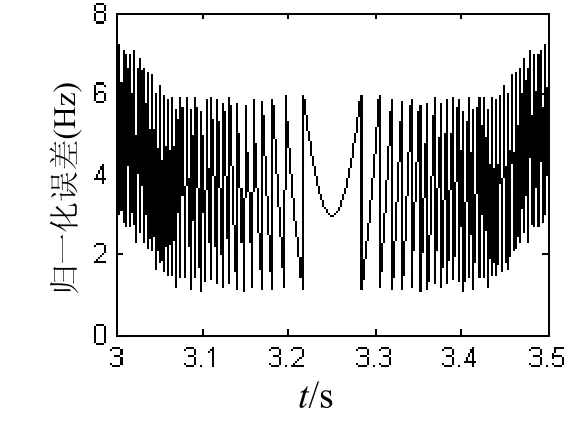
圖6 誤差與時(shí)間曲線(3~3.5 s時(shí)段)
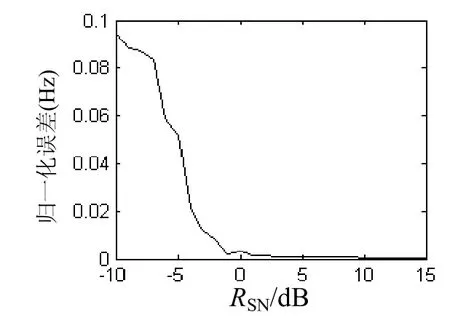
圖7 誤差與信噪比曲線(0~3 s時(shí)段)
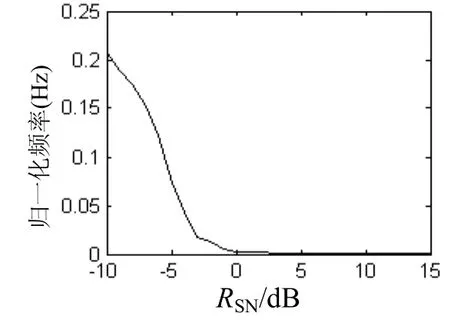
圖8 誤差與信噪比曲線(3~3.5 s時(shí)段)
5 結(jié)語(yǔ)
為了更好的對(duì)高動(dòng)態(tài)環(huán)境信號(hào)進(jìn)行跟蹤,本文在分析高動(dòng)態(tài)GPS信號(hào)模型及Wigner-Ville分布理論的基礎(chǔ)上,設(shè)計(jì)了基于Wigner-Ville分布的高動(dòng)態(tài)頻率跟蹤算法,可跟蹤在多普勒頻率、頻率變化率、頻率二階導(dǎo)數(shù)都很大的環(huán)境;仿真分析了跟蹤性能。可以得出結(jié)論:該算法在高動(dòng)態(tài)環(huán)境中可以很好的跟蹤GPS接收機(jī)動(dòng)態(tài)信號(hào),有效的解決高動(dòng)環(huán)境下載波同步的問(wèn)題。
[1] 皮世杰,黃登山,龔誠(chéng).部分匹配濾波器在高動(dòng)態(tài)衛(wèi)導(dǎo)信號(hào)快捕的應(yīng)用[J].通信技術(shù),2008,41(01):6-8.
[2] Vilnrotter V A, Hinedi S, Kumar R. Frequency Estimation Techniques for High Dynamic Trajectories[J]. IEEE Trans on AES,1989, 25(04):559-577.
[3] Kumar R. Fast Frequency Acquisition via Adaptive Least Squares Algorithm[J].IEE Proceedings,1989,136(04):155-160.
[4] 王宏禹.非平穩(wěn)隨機(jī)信號(hào)分析與處理[M].北京:國(guó)防工業(yè)出版社,1999.
[5] 徐長(zhǎng)雷,蔡德林,劉曉琴.基于軟件無(wú)線電的載波跟蹤環(huán)研究及仿真[J].通信技術(shù),2007,40(11):113-115.
[6] 李小民.高動(dòng)態(tài)環(huán)境GPS應(yīng)用中的幾個(gè)關(guān)鍵問(wèn)題研究[D].北京:北京航空航天大學(xué),1999.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
新世紀(jì)智能(英語(yǔ)備考)(2019年12期)2020-01-13 06:07:18
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
中國(guó)生殖健康(2018年6期)2018-11-06 07:09:28
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
