基于最優粘著利用的地鐵牽引電機并聯控制策略
2010-06-30 07:42:48林文立劉志剛孫大南吳佐民刁利軍
電工技術學報 2010年6期
關鍵詞:控制策略
林文立 劉志剛 孫大南 吳佐民 刁利軍
(北京交通大學電氣工程學院 北京 100044)
1 引言
由于空間、成本限制,地鐵列車一般采用架控模式,即一臺牽引變流器驅動同一轉向架上的兩臺牽引電機并聯運行,每臺電機通過齒輪箱與車輪機械連接。在轉向架的制約下,兩個車輪的輪緣線速度是相同的,但由于受到摩耗、鏇輪、折舊換新等因素影響,兩個動輪之間必然存在輪徑差異,由此造成兩臺電機轉速和轉矩均不相同。此外,列車前進主要依靠車輪與鋼軌之間的粘著力隨軌面狀況的不同變化很大,比如潮濕、樹葉、油污等都會造成可利用粘著的陡降。因此,如果不采取適當的粘著控制策略,當電機轉矩大于粘著力矩時車輪會空轉或打滑,不僅影響乘客旅行舒適度,降低地鐵車輛性能,而且會加劇輪軌間的摩耗。
文獻[1-2]采用模糊控制算法來預測并抑制車輪空轉/打滑的發生,但由于模糊邏輯復雜、編程困難,迄今為止在地鐵牽引傳動等可靠性、安全性較高的領域沒有使用先例。
文獻[3-4]提出基于轉子平均磁場定向的并聯電機矢量控制策略,但其控制目標是要達到相同的轉速,而忽略了電機間轉矩的不平衡,這樣的控制思路不太適用于地鐵傳動。
文獻[5]采用定子磁場定向控制策略對機車輪徑差造成的并聯電機轉矩不平衡進行控制,但是該文采用傳統粘著控制方法,導致可用粘著的利用率非常低。
本文提出一種基于最優粘著利用的地鐵并聯電機控制策略,以保證最易空轉或打滑的車輪能最大化利用當前粘著,并降低輪徑差引起的轉矩不平衡度,提高兩電機的平均輸出轉矩。文中重點介紹了最優粘著控制的實現方法,引入轉矩不平衡度的概念,深入分析了導致地鐵并聯電機轉矩不平衡的原因,并有針對性地提出牽引電機并聯控制策略。最后,進行了仿真研究和試驗驗證。
2 地鐵牽引傳動系統的組成
圖1為地鐵牽引傳動系統的基本組成框圖,S1和S2為速度傳感器。每節地鐵車輛有2個轉向架,每個轉向架上有2個牽引電機驅動的動軸。牽引電機控制系統接收由司控手柄給定的轉矩指令T*,經過最優粘著控制模塊對轉矩指令加以限制,給出電機矢量控制所需的轉矩給定T*m,保證輪軌間的最優粘著狀態。并聯牽引電機控制模塊根據車速和電機轉速信號,計算出兩個動輪的輪徑差,并根據差值大小對牽引電機勵磁進行補償,得到電機矢量控制所需的勵磁給定ψ*m。同時,給出參考轉子角速度ω 用于電機矢量控制和最優粘著控制。最后經過間接磁場定向的矢量控制模塊產生 PWM 脈沖,將1500V DC逆變成電壓、頻率均可變的交流電對牽引電機進行變頻調速,以帶動地鐵列車整體向前運行。
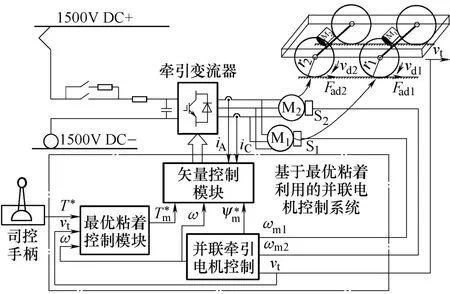
圖1 地鐵牽引傳動系統組成框圖Fig.1 System diagram of metro traction inverter
3 最優粘著利用控制
3.1 輪軌粘著機理
粘著力是由于車輪和鋼軌的接觸面上出現一定的車輪相對車體的切向運動時產生的,這種切向運動速度稱為蠕滑速度,表示為

式中,vslip為蠕滑速度;vd是車輪輪緣線速度;vt是車體速度;Fadhesion為粘著力;μ為粘著因數;M為平均軸重;g為重力加速度常數。
通過對轉向架上的動軸(帶牽引電機)進行受力分析可知,由粘著力Fadhesion產生的轉矩實際上是牽引電機的負載轉矩。故有

式中,TL為牽引電機負載轉矩;r為動輪半徑;Rg為齒輪箱傳動比。
大量的分析以及試驗結果表明,粘著力隨著蠕滑速度的增加而增大,但當蠕滑速度增大到某一值以后仍繼續增加,粘著力會陡降,這被稱為粘著特性[6]。粘著特性可以用粘著因數與蠕滑速度之間的關系表達,圖2給出了不同路況下最大可利用的粘著特性曲線[7]。雖然不同路況的粘著特性曲線各不相同,但在各種路況下都存在相應的粘著峰值點(μmax,vslip),即該點處所能提供的粘著力最大。
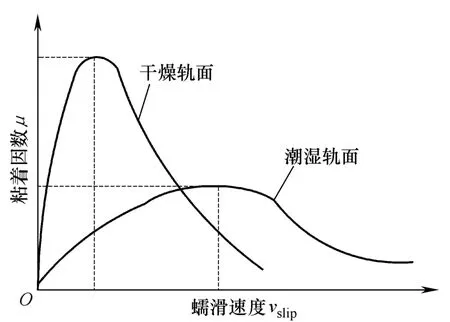
圖2 干燥、潮濕路況下最大可利用的粘著曲線Fig.2 Typical maximum adhesion characteristics curves for dry and wet conditions
最優粘著控制的本質,就是在路況粘著惡化時,自動搜尋當前路況下的粘著峰值點,通過并聯電機控制,保證最易空轉/打滑的動軸車輪運行在粘著峰值點附近,從而達到對當前粘著的最優利用。
3.2 基于全維狀態觀測器的最優粘著利用控制
從圖2中的粘著特性曲線可以看出,粘著峰值點左側 dμ/dvslip>0,右側 dμ/dvslip<0,在峰值點附近,dμ/dvslip≈0,而
式中,蠕滑速度vslip可由式(1)求得,粘著因數 μ由式(2)~式(3)可知,與電機負載轉矩TL成正比。但是在實際列車運行過程中,根本無法檢測電機的負載轉矩。因此,提出建立全維狀態觀測器來觀測牽引電機的負載轉矩TL。
事實上,列車在兩站間運行時,由于其巨大的慣性,牽引電機負載轉矩基本不會突變,即使是在最極端的情況下(比如列車運行于露天軌道,由于雨雪天氣造成粘著因數的陡然下降),由于電機軸端還通過齒輪箱與笨重的輪對機械連接,其負載轉矩擾動的變化時間常數也遠遠大于控制器的時間常數,因此在建立狀態觀測器時,可認為牽引電機負載轉矩(即式(3)中TL)為一常數。
此外,牽引電機的轉動方程

式中,Jm為電機慣性常量;ω 為電機轉子角轉速;Tm為電機電磁轉矩;B為電機粘滯系數。
根據式(3)和式(5),可得如下狀態空間表達式[8-9]:
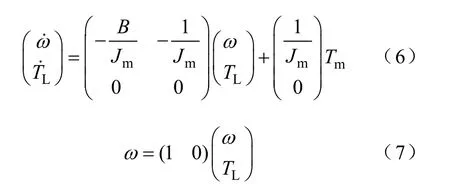
根據線性定常系統的能觀性判據可知,上述線性定常系統是完全能觀的,因此狀態矢量(ω,TL)T可由 Tm和ω 進行重構(即建立狀態觀測器,使觀測結果無限接近實際值)。地鐵車輛電磁環境惡劣,系統安全性能要求很高,為實現高性能的交流電機控制,采用全維狀態觀測器,以避免因噪聲干擾或者測量誤差對系統性能造成的影響。根據式(6)和式(7)構造具有反饋增益矩陣的全維狀態觀測器[10],如下:
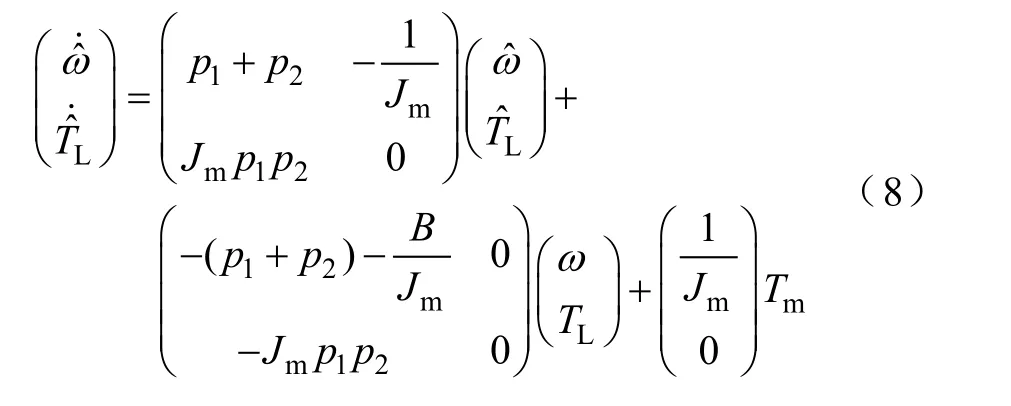
圖3所示為最優粘著控制算法框圖。
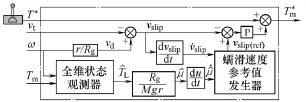
圖3 最優粘著控制算法框圖Fig.3 Diagram of optimized adhesion control
圖3中的輸入量有:司控手柄指令T*,車體速度vt、電機轉子角轉速ω 和電機實際電磁轉矩Tm,輸出量為電機矢量控制轉矩給定。全維狀態觀測器模塊根據式(8)設計,其輸出即為觀測到的電機負載轉矩,然后根據式(2)和式(3),求得對應的粘著因數,對其微分作為蠕滑速度參考值發生器的一個輸入量。蠕滑速度參考值發生器的作用是在列車運行過程中,自動搜索當前路況下的最佳蠕滑速度值,保證粘著利用區域始終在粘著峰值點附近,即達到最佳的粘著利用。它的另一個輸入量是對式(1)中vslip微分得到,輸出即為經過優化選擇的蠕滑速度參考值,具體選擇方法如下:

式中,α、β 為修正常數(均取值 1e-5);式(9)左側 vslip(k+1)即為圖 3中最優蠕滑速度參考值發生器的輸出值vslip(ref)。
最優蠕滑速度參考值 vslip(ref)與當前實際蠕滑速度 vslip的差值,經比例調節后,其結果與司控手柄指令T*做加法,即得出電機控制所需的轉矩給定信號。
4 由輪徑差異造成的轉矩不平衡及控制策略
由于受機械制約,同一轉向架下的兩個動輪輪緣線速度(vd)是近似相同的,即

式中,D1、D2分別為電機 1、2所在的動輪直徑;n1、n2分別為電機1、2的轉速。
地鐵同一轉向架上的兩臺牽引電機,通常人為選擇、保證基本參數一致[12],因而本文中并聯電機控制,只考慮輪徑差異的影響。
根據式(10),設輪徑 D1>D2,那么 n1>n2。如圖4所示,由于異步電動機硬的轉矩特性,轉差率的細小差別也會對同一逆變器供電的并聯牽引電機的負荷分配產生極大影響,進而出現并聯電機的轉矩不平衡。輪徑差值越大,轉矩不平衡越嚴重,導致其中一個電機最大化利用當前粘著而另外一個實際轉矩很小,即轉向架整體的平均粘著利用率不高,影響地鐵列車的加減速性能。
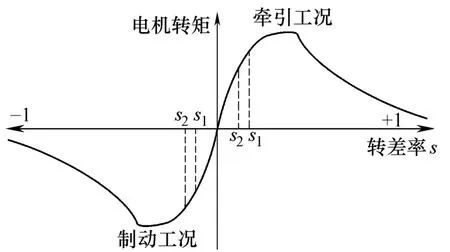
圖4 牽引電機轉矩-轉差率曲線(輪徑D1>D2)Fig.4 Motor“torque-slip ratio”characteristics(D1>D2)
在交流傳動牽引控制系統中,轉差率s一般很小,可認為

式中,Km為電機常數;U1為電機定子端電壓;f為定子頻率。
假設同一轉向架下兩臺牽引電機1和2特性完全一致,并且兩臺牽引電機由一個逆變器供電,因此它們的U1和f是相同的,進而可知牽引電機輸出轉矩T與電機轉差率s成正比。假設牽引電機1的轉矩為T1、轉差率為s1,牽引電機2的轉矩為T2、轉差率為 s2,兩臺電機的輸出轉矩平均值為 T,轉速平均值為n,轉差率平均值為s,兩個動輪的輪徑平均值 D=(D1+D2)/2,輪徑差?D=D1-D2(設 D1>D2),那么,T1/T=s1/s,也即
由式(10)知,n1=nD/D1。
設逆變器控制的同步速度為ns,定義?T=T1-T,則轉矩不平衡度?T/T為
由式(11)可知,地鐵架控并聯電機的轉矩不平衡,與牽引異步電動機的時間常數、逆變器供電電壓及頻率無關,只與輪徑差異和電機的轉差率有關。輪徑差不可控制(但可以檢測),因此為抑制地鐵并聯電機轉矩不平衡,必須對轉差率 s(或轉差角速度ωsl)加以限制。
圖5所示為地鐵并聯牽引電機抑制轉矩不平衡控制框圖。當地鐵列車處于惰行(牽引力為零)狀況時,“輪徑差值計算”模塊會根據列車速度 vt和電機 1/2轉速ω1/ω2計算出兩電機所在的車輪直徑D1和 D2,進而計算出輪徑差?D。并聯牽引電機控制根據?D的大小選擇磁通衰減信號?ψ,使能電機勵磁補償功能。牽引電機磁通給定ψ*是車速的函數,它與?ψ 的差值作為電機矢量控制所需的磁通給定指令。這樣在電機矢量控制算法[13]中,因為減小,定子電流磁通分量給定值也減小,而轉矩分量給定增大(因為轉矩給定是不變的),從而增加了轉差角速度給定ωsl,也即提高了平均轉差率,使得兩電機間轉矩不平衡程度減小。最后經過電機矢量控制算法產生牽引變流器驅動脈沖。需要指出的是,地鐵牽引電機轉差率調節范圍是有限度的,過大則電機效率下降,一般限制在5%以內。
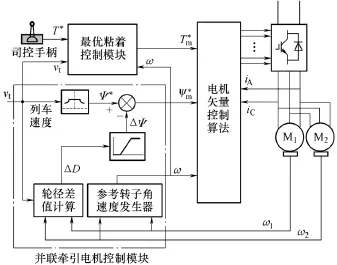
圖5 牽引電機并聯控制策略框圖Fig.5 Diagram for metro paralleled motor control
另外,最優粘著控制以及電機矢量控制算法均需要參考轉子角速度值ω,但ω 不應該簡單地認為是ω1和ω2的平均值。從圖 4可以看出,輪徑 D1>D2,在牽引加速過程中,電機1轉差率大(電機轉速ω1低),穩態時輸出轉矩大,在地鐵列車運行過程中更易發生空轉;而在制動過程中,電機2轉差率大(電機轉速高),穩態時輸出轉矩大更易發生打滑現象。因此,從牽引電機的最優粘著控制的角度出發,需按照以下方法選擇參考轉子角速度ω:①牽引時:ω =min(ω1,ω2);②制動時:ω =max(ω1,ω2)。
5 仿真研究
為了對基于最優粘著利用地鐵牽引并聯電機控制進行研究,在Matlab中搭建了牽引傳動系統仿真模型,下表為模型仿真參數。
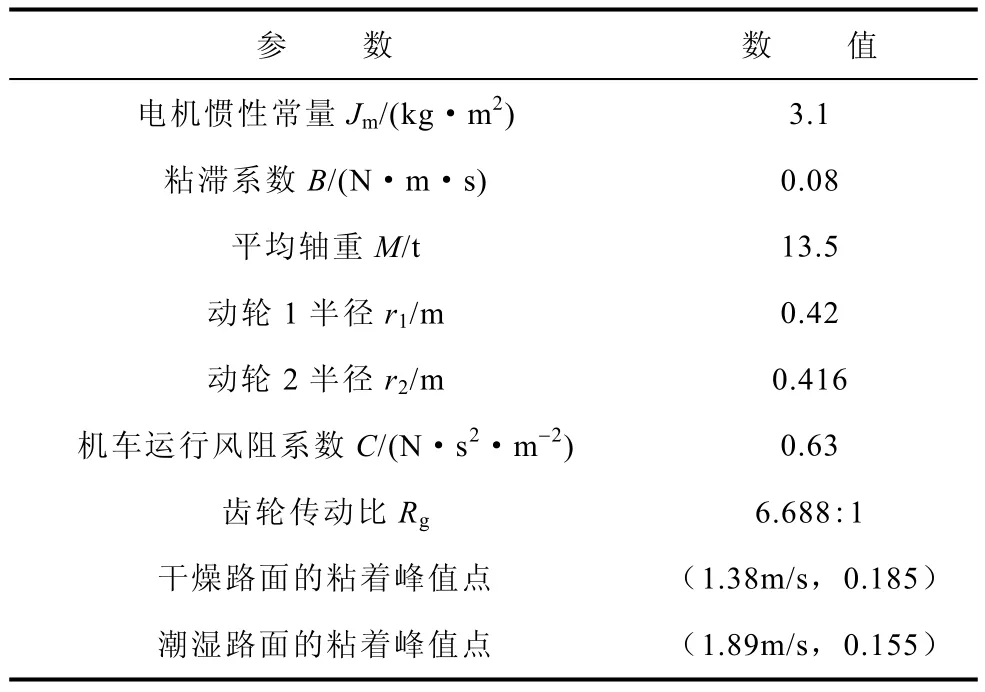
表 模型仿真參數Tab. Parameters of simulated model
為了驗證最優粘著控制算法的正確性,進行牽引加速過程中路況惡化(由干燥變化為潮濕)時的仿真,圖6所示為仿真過程中動輪1、2輪緣線速度vd1、vd2,車體速度vt,模擬司控手柄給定轉矩指令T*,電機1、2的轉矩Tm1、Tm2,電機1、2的定子A相電流iA1、iA2波形圖。
圖6b中的初始時刻,模擬司控手柄給定轉矩指令T*為1490N·m。可以看出,圖6d、圖6e中電機1和電機2經過VVVF軟起動電機電流穩步上升,圖 6b、圖6c中電機轉矩Tm1、Tm2也穩步提升至最大轉矩,跟隨轉矩給定指令T*,轉矩響應比較平穩,圖 6a中動輪 1、2輪緣線速度 vd1、vd2,車體速度vt也逐步升高。
t=5s時,路面由干燥轉為潮濕,由于路面可用粘著急劇下降,動輪1和2均發生空轉現象,圖6b、圖 6c中電機轉矩 Tm1、Tm2迅速下降,基于全維狀態觀測器的中最優粘著控制模塊自動并快速搜索當前路況的粘著峰值點;在t=8.1s時,電機1轉矩接近潮濕路況下可利用的最大粘著轉矩,在此以后保持最優粘著推動列車前進。最優粘著控制模塊發揮作用期間(t=5~8.1s),電機電流變化比較平穩,轉矩響應也穩步提升,保證了牽引傳動系統的穩定和可用粘著的最優利用。
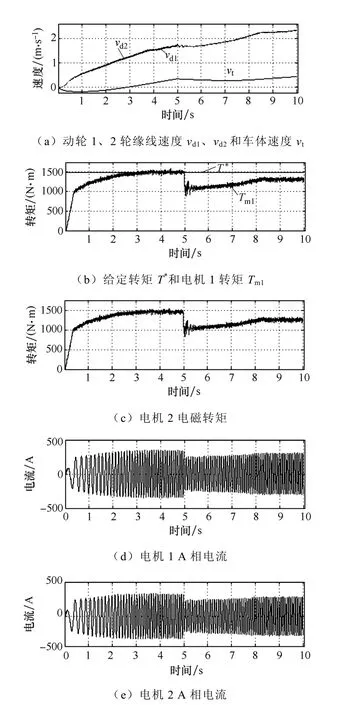
圖6 路況由干燥變為潮濕時的仿真波形Fig.6 Simulation waveforms from dry condition changing into wet condition
為了分析驗證并聯電機優化控制中勵磁補償環節的實施效果,進行如下仿真并獲得了如圖7所示的波形。
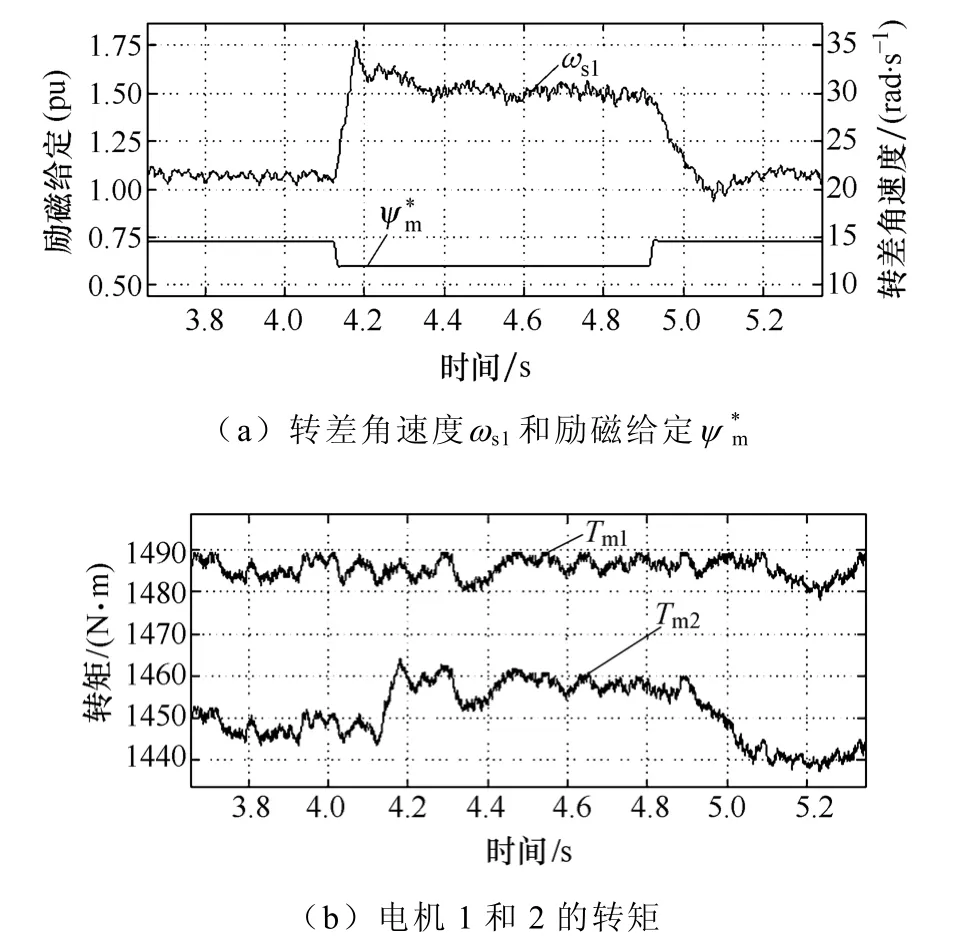
圖7 “勵磁補償”環節實施效果的仿真波形Fig.7 Simulation waveforms for magnetizing compensation’s effection
仿真結果表明,即使路況由干燥突變為潮濕,所提出的牽引電機最優粘著控制策略仍可自動搜索粘著峰值點并實現對當前路況下最優粘著利用,同時并聯牽引電機抑制轉矩不平衡控制策略的實施,也降低了兩電機間的轉矩不平衡,保證了列車整體牽引能力(整體粘著利用率)的提高。
6 試驗驗證
使用基于最優粘著利用的牽引電機并聯控制策略的牽引變流器,在某地鐵線路進行了灑自來水/混合液的粘著利用試驗,以考核地鐵列車實際運營過程中,由干燥路面突然轉為濕滑路面時的牽引電機防滑/防空轉能力,試驗波形如圖 8所示,其中圖 8a為司控手柄給定的轉矩指令和實際牽引電機電磁轉矩隨時間變化的曲線,圖 8b為實時計算的牽引電機 1功率和動軸 1速度隨時間變化的曲線。
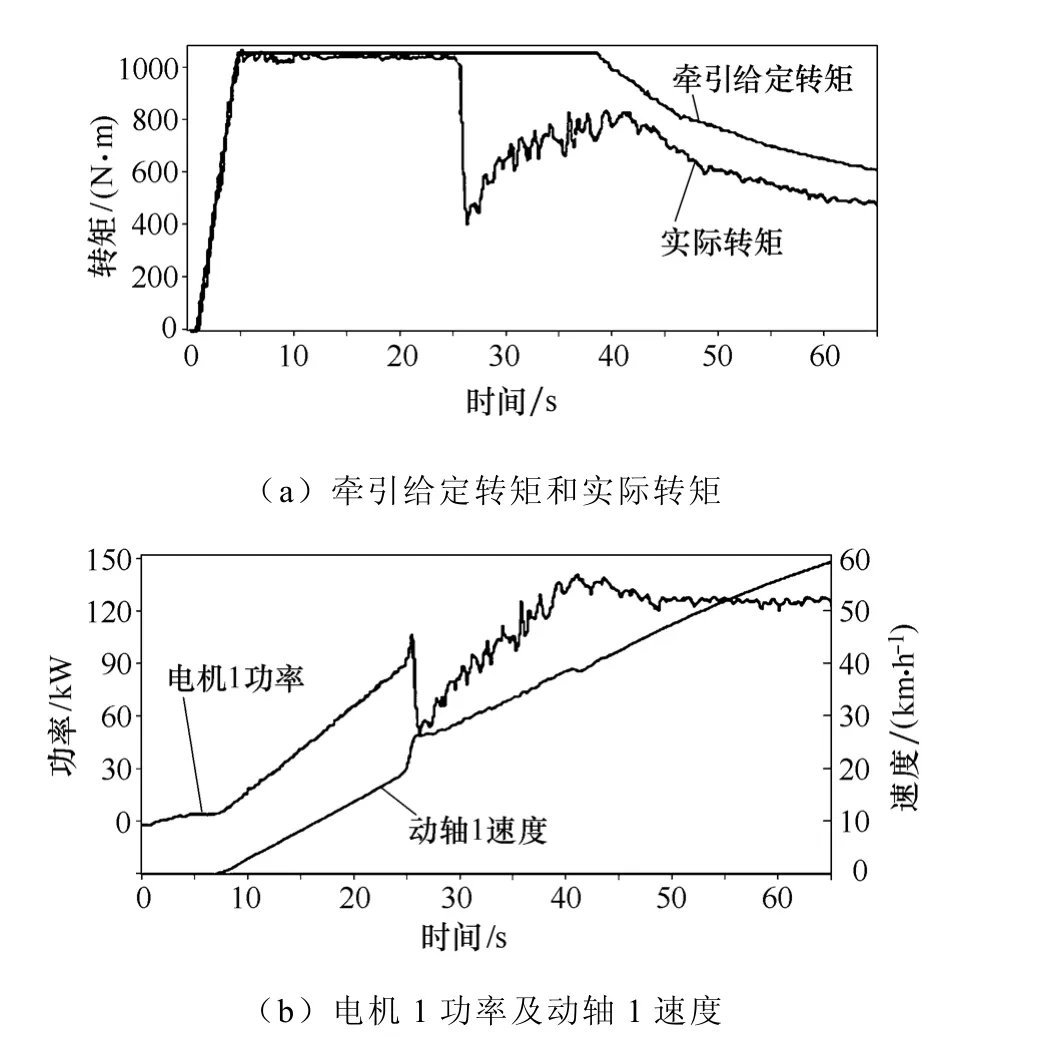
圖8 電機轉矩、功率、轉速試驗波形Fig.8 Experimental waves for motor torque,power and speed
試驗如下:t=7s時列車啟動,司機手柄給定最大牽引力全力加速。如圖8a所示,t=25s時列車進入灑水/混合液的路面,此時,由于路面由干燥突然轉變為濕滑,輪軌間可用粘著急劇下降,圖8b中動軸1速度突變,但在可以控制的范圍之內。此時,基于最優粘著利用的電機控制策略,快速判斷并搜索當前路況的可用粘著情況,控制電機電磁轉矩逐漸接近當前可利用的最大粘著區域,如圖8a所示,在t=35s左右,電機實際輸出轉矩基本穩定。
根據地鐵列車的牽引特性,車速大于 35km/h時,進入恒功率運行階段,此時圖8a中電機轉矩指令呈一次方下降,電機實際輸出轉矩也跟隨下降,從圖8b電機功率曲線看出,t=40s之后電機功率基本穩定,滿足地鐵列車的要求。
通過對試驗波形分析可以看出,基于最優粘著利用的地鐵并聯電機控制策略實施效果基本與模型仿真結果一致,牽引電機控制粘著利用率大于80%,而且電機響應快速、平穩,滿足地鐵列車的設計要求,證明了所提出的基于最優粘著利用的牽引電機控制策略的正確性。
7 結論
粘著控制是地鐵牽引電機控制領域特有的、并且是必須解決的問題,本文使用全維狀態觀測器觀測電機負載轉矩,用以計算并判斷當前粘著利用情況,然后通過限制電機給定轉矩來實現對當前可用粘著的最大利用。此外,深入分析了地鐵架控并聯電機轉矩不平衡的原因,并結合最優粘著控制,提出了帶勵磁補償的牽引電機并聯控制策略,降低了電機間的轉矩不平衡,當路面粘著狀況惡化時,可以提高整體的粘著利用率。通過對Matlab模型的仿真研究和試驗,驗證了所提出的電機控制策略的正確性。
[1]Kansala K, Hasemann J. An embedded distributed fuzzy logic traction control system for vehicles with hydrostatic power transmission[C]. IEEE 7th Mediterranean Electrotechnical Conference, 1994, 2:719-722.
[2]Hasemann J, Kansala K. A fuzzy controller to prevent wheel slippage in heavy duty off road vehicles[C].IEEE 44th Vehicular Technology Conference, 1994:1108-1112.
[3]李衛超, 胡安, 聶子玲, 等. 異步電機并聯運行磁場定向控制[J]. 電工技術學報, 2006, 21(11): 21-27.Li Weichao, Hu An, Nie Ziling, et al. Field-oriented control of parallel-connected induction motors[J].Transactions of China Electrotechnical Socity, 2006,21(11): 21-27.
[4]李衛超, 胡安, 聶子玲. 感應電機并聯運行矢量控制系統仿真研究[J]. 電機與控制學報, 2006, 10(1):102-106.Li Weichao, Hu An, Nie Ziling. The simulation research on vector control of parallel-connected induction motors[J]. Electric Machines and Control, 2006, 10(1):102-106.
[5]Matsumoto Y, Osawa C, Mizukami T, et al. A statorflux-based vector control method for parallel-connected multiple induction motors fed by a single inverter[C].Applied Power Electronics Conference and Exposition, 1998: 575-580.
[6]李江紅, 馬健, 彭輝水. 機車粘著控制的基本原理和方法[J]. 機車電傳動, 2002 (6): 4-8.Li Jianghong, Ma Jian, Peng Huishui. Basic principle and methods of adhesion control of locomotive[J].Electric Drive for Locomotives, 2002(6): 4-8.
[7]徐立恩, 陳華國, 曾云, 等. 廣州地鐵車輛國產化改造的粘著利用控制[J]. 機車電傳動, 2008(6): 44-47.Xu Lien, Chen Huaguo, Zeng Yun, et al. Adhesion control of localized modification guangzhou metro vehicle[J]. Electric Drive for Locomotives, 2008(6):44-47.
[8]Kawamura A, Furuya T, Takeuchi K, et al. Maximum adhesion control for Shinkansen using the tractive force tester[C]. IEEE 2002 28th Annual Conference of the Industrial Electronics Society, 2002: 567-572.
[9]Takaoka Y, Kawamura A. Disturbance observer based adhesion control for Shinkansen[C]. IEEE 6th International Workshop on Advanced Motion Control,2000: 169-174.
[10]劉豹. 現代控制理論[M]. 北京:機械工業出版社,1994.
[11]宋文祥, 姚鋼, 周文生, 等. 異步電機全階狀態觀測器極點配置方法[J]. 電機與控制應用, 2008,35(9): 6-10.Song Wenxiang, Yao Gang, Zhou Wensheng, et al.Pole arrangement method of full-order state observer for asynchronous motors[J]. Machine and Control Application, 2008, 35(9): 6-10.
[12]楊旭麗, 彭星明. 機車牽引電機一致性問題與匹配[J]. 電機技術, 2007 (1): 14-15.Yang Xuli, Peng Xingming. The coherence and matching problem between locomoive traction motors[J]. Motor Technology, 2007(1): 14-15.
[13]杜永紅, 李哲峰, 劉志剛. 異步電動機間接磁場定向控制雙閉環系統[J]. 電工技術學報, 2009, 24 (5):24-28.Du Yonghong, Li Zhefeng, Liu Zhigang. Indirect field orientation double close loop system of induction motors[J]. Transactions of China Electrotechnical Socity, 2009, 24 (5): 24-28.
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
電測與儀表(2014年17期)2014-04-04 11:56:50