基于PLC的緊湊型回旋加速器聯鎖保護系統
2010-06-21 08:32:40胡嘯熊永前李冬楊軍胡桐寧萬里濤
電氣傳動 2010年9期
胡嘯 ,熊永前,李冬 ,楊軍 ,胡桐寧,萬里濤
(1.華中科技大學 電氣與電子工程學院,湖北 武漢 430074;2.孝感生物工程學校,湖北 孝感 432100)
1 引言
本課題組研究設計的CYCHU-10緊湊型低能強流回旋加速器主要通過引導束流擊打液態靶完成PET成像所需短壽命同位素的生產。該回旋加速器日常主要由一般醫護人員操作,需要有效的聯鎖保護系統提供支持。在加速器控制領域,測控任務既有與普通工業控制相似之處,比如需要面對高頻高壓強磁場的惡劣環境,又有其顯著特點,比如高精度的小信號測量,相關設備龐雜,測控信號對象繁復等。
另外,由于加速器的最終控制對象是在真空中高速運行的帶電粒子,因此控制系統需要有很高的可靠性、控制精度和實時響應速度[1],而設備及人身安全聯鎖保護系統正是其重要的組成部分。考慮到PLC成熟可靠的技術以及在加速器控制領域,特別是在聯鎖保護系統構建中的廣泛運用[2-5],建立了以PLC為核心,以網絡總線為構架,輔之以IPC實現上位監控的分布式聯鎖保護系統,具體完成屏蔽防護與警示,自動模式順序聯鎖,手動模式子系統互鎖和系統急停4部分功能。在不同的運行模式下確保系統的正確運行,及時發現系統異常,采取相應措施并發出警示信號,保障人身和設備安全。
2 聯鎖保護系統硬件
目前國際加速器界在控制系統設計和建造方面已經達成共識,即控制系統應該采用分布式體系結構,使用系統集成工具進行開發,盡可能多的采用標準化的商業硬件產品和先進成熟的技術,另外還要考慮到系統擴充的可能性[1],這些理念對于聯鎖保護系統的構建同樣適用。
2.1 總體結構
從總體硬件結構上說,由于控制對象的特殊性,惡劣的電磁工作環境以及系統自身的高可靠性要求,選擇以PLC為核心的系統構建方案,具體采用3層分布式結構,即監控層、總線控制層和現場層,如圖1所示。

圖1 聯鎖保護系統結構Fig.1 Structure of interlock protection system
監控層即上位機采用研華IPC-610系列工控機,能夠抗沖擊、振蕩,并且可以在高溫下穩定運行,適用于加速器周圍復雜惡劣的工作環境,主要用于動態監控加速器運行,故障報警以及記錄工作日志;總線控制層選用西門子模塊化中型PLC系統SIMATIC S7-300,利用其較快的運算速度和較強的輸入輸出能力,通過合適的硬件選擇組成基于網絡總線的分布式結構,運行程序完成數據采集、運算,實現回旋加速器的聯鎖功能。之所以選用S7-300這一中端系列PLC作為系統構架是考慮到將來系統擴充的可能性,保證硬件除了能夠完成小型回旋加速器聯鎖保護系統的自動化控制外,還足以在系統升級時承擔其它控制任務。
2.2 I/O模塊
聯鎖信號分為聯鎖故障信號(輸入)和聯鎖控制信號(輸出),部分見表1所示。經統計,整個聯鎖保護系統需要數字輸入(DI)44點,數字輸出(DO)30點,模擬輸入(AI)8點,分別需要采用SM321DI(DC 24 V)模塊,SM322DO(DC 24 V 2 A繼電器輸出)模塊和SM331AI(4~20 mA)模塊。數字輸出模塊采用繼電器輸出是考慮到其負載電壓范圍寬、導通壓降小、承受瞬時過電壓和過電流能力強的優點以及加速器負載設備并不需要頻繁動作的實際情況。

表1 子系統部分聯鎖保護信號Tab.1 Interlock protection signals of subsystems
2.3 CPU模塊
存儲器容量是選擇CPU模塊的重要依據。許多文獻資料中給出了不同的內存估算公式,大體上都是按數字量I/O點數的10~15倍,加上模擬I/O點數的100倍,以此數為內存的總字數(16位為一個字),另外再按此數的25%考慮裕量[6]。按照這種算法,S7-300系列所有型號的CPU都能滿足基本要求,但考慮到系統將來的擴展以及綜合對比了處理時間、I/O能力、內存、通訊連接、價格等因素,決定采用 CPU 317-2DP,這是S7-300高端CPU系列的低端產品,性價比高,具有大容量程序存儲器,可用于大規模的I/O配置和建立分布式I/O結構以及0.05 μ s的最小位指令處理時間。
2.4 網絡模塊
在網絡通信方面,加速器控制領域廣泛使用現場總線技術,它具有以下優點:可靠性高,兼容性好,組態靈活,節約導線、維護和安裝費用。PROFIBUS是目前國際上通用的現場總線標準之一,以其獨特的技術特點、嚴格的認證規范、開放的標準、眾多廠商的支持和不斷發展的應用行規,已成為最重要的現場總線標準[7]。但是要求所有現場設備都具備PROFIBUS接口是高成本的,所以本系統采用分布式I/O作為總線接口與現場設備連接,這種形式適用于現場總線的應用初期,實施方便,在目前加速器現場設備已經分組,且組內設備相對集中的實際情況下可以更好地發揮現場總線技術的優勢。具體實現方法是CPU317-2DP通過DP接口連接 ET200系列遠程分布I/O站,其中ET 200B自帶I/O點,適合在遠程站點I/O點數不太多的情況下使用,符合聯鎖保護系統對水冷和高頻等為數不多的幾個位置比較分散的子系統的信號采集需要。通過遠程I/O硬件,在增加少量成本的前提下,充分利用了成熟的PROFIBUS總線技術的優點,方便了接線,減少了可能出現的大量信號干擾,同時為將來的系統擴充升級建立了開放的網絡構架。
考慮到上位機在系統中只是起輔助監控作用,只選擇PLC作為一類主站,而工控機作為監控站通過串口與PLC一對一連接,可以在不失效率的前提下盡量減少成本。在這種結構中,監控站不在PROFIBUS網上,不是二類主站,不能直接讀取從站數據和完成遠程參數化工作,監控站所需的從站數據只能從PLC控制器中讀取。但是在將來系統升級時,仍可以方便地將工控機通過PROFIBUS網卡并入主網絡,成為二類主站,完成更加實時可靠的測控任務。
2.5 通訊模塊
系統選用CP341通訊模塊執行點到點高速串行通訊功能(RS232),便于PLC和底層智能設備,比如磁鐵電源進行聯鎖故障和控制信號的交換。
3 聯鎖保護系統軟件
3.1 程序結構
本程序在STEP7軟件平臺上編寫,主要運用了以下幾個邏輯塊:組織塊(OB),功能塊(FB),功能(FC),系統功能塊(SFB)及數據塊(DB)。程序邏輯結構如圖2所示。
聯鎖保護系統主程序OB1循環掃描執行,主要完成緊急停機、模式選擇及相關功能塊調用、系統運行故障處理、輻射屏蔽與警示4個功能。系統分為自動運行和手動運行兩種模式,自動模式通過調用由S7-Graph語言編寫的功能塊FB1實現CYCHU-10回旋加速器按圖3流程順序啟動。
手動模式通過功能FC3保證對用戶的錯誤操作做出正確的響應,防止造成不可預料的后果。OB1循環調用故障互鎖FB7,實時監控系統運行中可能出現的各種異常,及時進行處理。

圖2 聯鎖保護程序結構Fig.2 Structure of interlock protection program

圖3 順序啟動流程圖Fig.3 Sequence start-up flow chart
3.2 程序結構
3.2.1 主程序
主程序OB1由ST L語言編寫,循環調用,部分程序如下:

Network1是配電系統急停開關的PLC控制子程序,Network2是選擇自動模式后,主程序調用功能塊“auto-mode”實現順序啟動功能,正確執行后指示燈亮。另外還包括Network3調用故障檢測聯鎖,Network4調用手動模式互鎖以及Network5實現輻射安全保護。總之,主程序OB1主要承擔模式判斷、最基本的安全保護和功能塊調用的任務,具體功能實現由各子程序完成,這是符合結構化程序設計基本要求的。
3.2.2 順序啟動子程序
應用S7-Graph可以實現快捷的順序控制編程,部分程序如圖4所示。
控制程序由若干步(step)組成,step處于活動狀態時,相應的動作被執行,另外,對于標準動作可以設置互鎖,僅在step處于活動狀態和互鎖條件滿足時,有互鎖的動作才被執行,為了保證加速器設備順序啟動的可靠性,程序中大量使用了此類互鎖命令,比如對于Magnet-remote這一步(見圖5),由于加速器系統的磁鐵電源需要通過RS232通訊口與PLC通訊模塊CP341連接,以ASCII形式接受指令和傳遞參數,所以程序通過FC2(Magnet-remote)調用ASCII數據收發系統功能塊SFB60,SFB61來完成對磁鐵電源的遠程控制。但是,出于安全方面的考慮,只有在磁鐵溫度和磁鐵線圈水流聯鎖滿足時,遠程控制信號才會發送,并且需要電源穩定運行15 min仍無異常聯鎖的情況下才能繼續順序啟動過程。上述功能主要就是運用S7-Graph的互鎖命令實現的。
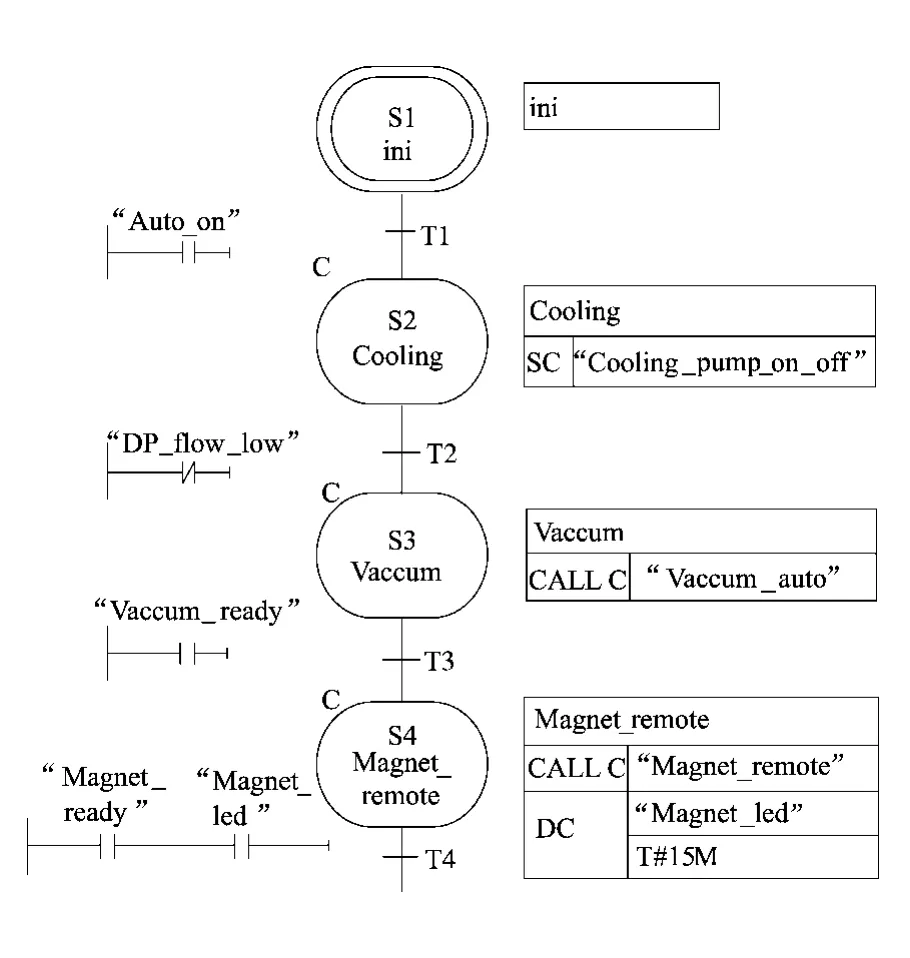
圖4 順序啟動S7-Graph子程序Fig.4 Sequence start-up S7-Graph subprogram

圖5 磁鐵電源遠程控制S7-Graph步Fig.5 S7-Graph step of magnet power remote control
3.2.3 真空控制子程序
在自啟動過程中,真空系統的兩級抽真空序列控制流程比較復雜,程序設計在功能FC1(Vaccum-auto)中獨立實現。PLC程序需要讀取真空計的模擬信號,逐級控制泵和閥的動作。首先是機械泵開,幾秒后預抽閥開,當壓力達到20 Pa,擴散泵電源開,指示燈在機械泵抽擴散泵時一直閃爍,大約30 min后,進入初級抽真空序列,前級閥開啟,當腔體壓力到達7 Pa時,初級抽真空序列結束。接著,高真空閥打開,擴散泵開始抽真空,進入次級抽真空序列。圖6是LAD語言編寫的擴散泵控制程序的一部分,程序調用了系統功能塊完成真空度模擬量的讀取和比較,在滿足條件后執行擴散泵開啟動作。

圖6 擴散泵控制子程序Fig.6 Diffusion pump control subprogram
3.2.4 故障處理子程序
主程序循環調用故障處理子程序確保能正確處理加速器運行過程中可能出現的各種異常情況。圖7是故障處理子程序的一部分,包含3個部分:故障檢測、延時和處理方法。故障檢測通過并聯的6路位邏輯指令常開或常閉觸點watererror,vaccum-error,magnet-error,Dee-volt-OK,IS-OK,radiation-high組成的轉化條件實現,一旦任意子系統出現疑似故障,程序進入延時步,發出警告,等待工作人員干預,如果延時完畢故障依然存在,系統進入故障處理步,針對不同系統故障執行相應的動作。

圖7 故障處理子程序Fig.7 Erro r process subprogram
4 結論
目前,該聯鎖保護系統正在與包括高精度磁鐵電源,二級水分布系統,配電控制系統在內的CYCHU-10緊湊型回旋加速器各子系統進行連接,并將在近期運用到磁場測量和墊補工作中。實際結果表明,該系統運行情況良好,自動化程度高,抗干擾能力強,能夠滿足加速器系統需求。本設計采用的PLC為核心、PROFIBUS現場總線為網絡構架、STEP7為編程工具、S7-Graph為主要編程語言是對各類加速器測控普遍適用的技術路線,可以得到以下結論。
1)PLC以其技術成熟、穩定可靠的特點,適用于回旋加速器這類復雜電磁裝置的聯鎖保護系統構建。
2)基于網絡總線的分布式結構可以使系統更加便捷有效的實現,靈活性和可擴充性更強。
3)運用結構化的編程方法和STEP7中的S7-Graph圖形化編程語言對于順序控制以及聯鎖邏輯的程序編寫效率提高很有幫助。
[1]曾自強,張立鋒,呂衛星,等.10 MeV輻照電子直線加速器控制系統[J].原子能科學技術,2005,39(2):114-117.
[2]仇文君,周大勇,陳建鋒,等.基于PLC的直線加速器連鎖保護系統[J].核技術,2008,7(31):506-510.
[3]Kadokura E,Suwada T,Satoh M,et al.PLC-based Beam Charge Interlock System for Radiation Safety in the KEKB Injector LINAC[C]//Proceeding s of International Conference on Accelerator and Large Ex perimental Physics Control Systen.Knoxville:IEEE,2007:149-151.
[4]Tang J Y,Smith J D,DeVan W R,et al.A Distributed and Collaborative PLC Lab for the Spallation Neutron Source[C]//Proceedings of International Conference on Accelerator and Large Experimental Physics Control System.T rieste:IEEE,1999:370-372.
[5]趙籍九.加速器控制系統及其進展[J].中國物理C,2008,32(S1):139-141.
[6]白新莊.PLC的選型探討[J].石油化工自動化,2005,22(5):22-24.
[7]潘振華,劉海江.基于現場總線的油庫監控系統研發[J].電氣傳動,2006,36(11):50-53.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50