船模六自由度運動量的接觸式測量
2010-06-21 01:02:28孟祥瑋高學平
船舶力學 2010年4期
孟祥瑋 , 高學平
(1天津大學建筑工程學院,天津 300072;2交通部天津水運工程科學研究院,天津 300456)
船模六自由度運動量的接觸式測量
孟祥瑋1,2, 高學平1
(1天津大學建筑工程學院,天津 300072;2交通部天津水運工程科學研究院,天津 300456)
在系泊船模在波浪中的運動水工模型試驗中,設計了一種試驗測量儀器。該儀器可用于測量波浪作用下系泊船模的六自由度運動量。將6支拉繩式位移傳感器固定在船模上方,每個傳感器的拉繩均與下方的船模固定。船模晃動時會帶動6根拉繩。根據(jù)6根拉繩長度變化和前一時刻船模的姿態(tài),可以計算出船模運動的六自由度運動量。經(jīng)波浪試驗表明,該儀器可以很好地反應系泊船模的六自由度運動量,達到了預期的目的。
船模;波浪;六自由度;模型試驗
1 引 言
船舶在波浪中會發(fā)生搖蕩。假設船舶為剛體,那么船舶在波浪作用下的運動可以分解成繞船上直角坐標系 X、Y、Z 軸的轉(zhuǎn)角 θ、ψ、φ 和沿 X、Y、Z 軸的位移 x、y、z, 即船舶的六自由度運動量(θ、ψ、φ、x、y、z)。 分別稱為橫搖、縱搖、首搖以及縱蕩、橫蕩、垂蕩[1],詳見圖 1。
系泊船舶在碼頭前沿的六自由度運動量是船舶耐波性研究的重要內(nèi)容,對于碼頭結(jié)構(gòu)設計、碼頭作業(yè)天數(shù)確定等具有重要意義。近年來隨著我國港口事業(yè)發(fā)展,波浪模型試驗中越來越重視船舶六自由度運動量的測量。
水工模型試驗中,系泊船舶的六自由度運動量測量方法主要有攝像測量[2]、利用加速度傳感器測量以及通過機械裝置測量。攝像測量方法屬于非接觸測量,對船模運動干擾較小,但是測量系統(tǒng)受環(huán)境光線影響較大。加速度傳感器測量主要是測量船模的3個轉(zhuǎn)角和3個運動加速度,再通過積分計算速度和位移,在計算位移時避免不了累計誤差。機械裝置測量有通過船模帶動一套精密加工的運動系統(tǒng)進行測量的方法,精度較高,缺點是設備加工制作比較麻煩。
拉繩式測量方法屬于接觸式測量。有資料顯示,過去有人采用最多3根拉繩通過帶動電位器或水位傳感器測量船模沿3軸向位移,由于傳感器和測量方法問題測量精度不高,沒有考慮運動量間的互相影響,并且沒有測量角度。為此在波浪水工模型試驗中,嘗試用拉繩位移傳感器測量系泊船舶的六自由度運動量。該方法的不同之處在于,采用并行機構(gòu)運動測量技術(shù),能夠同時測量系泊船舶的六自由度運動量,不受環(huán)境光線影響,沒有累計誤差,測量精度高。儀器制作和使用都比較簡單,實用性強。

2 測量設計
系泊船舶運動物理模型試驗一般采用正態(tài)整體物理模型試驗方法,需要測定系泊船舶在波浪、水流作用下,不同水位、不同裝載狀態(tài)時的船舶運動量、系纜力和撞擊力。船模的相似性,需按重力相似準則設計。系泊船舶在波浪、水流共同作用下,主要受波浪力、水流力、系纜力、撞擊力的作用。為測量船舶六自由度運動量,采用以下方法。
為了彌補攝像測量不穩(wěn)定的缺點,采用接觸式測量。為了加工制作簡單,采用拉繩式測量系統(tǒng)。利用六個拉繩位移傳感器測量波浪模型試驗中系泊船舶在碼頭前沿的六自由度運動量。拉繩位移傳感器與岸邊固定,位于船舶上方,六根拉繩從傳感器拉出,固定于船身。船舶在風、浪、流作用下,發(fā)生六自由度運動,同時帶動拉繩運動。拉繩位移傳感器測量拉繩長度變化,將數(shù)據(jù)傳給信號處理計算機。計算機根據(jù)拉繩長度計算出船舶每時刻的姿態(tài),以六分量(θ、ψ、φ、x、y、z)的形式表示。
本方法主要受飛機、汽車和輪船等模擬駕駛操縱運動平臺啟發(fā)。運動模擬平臺一般包括上平臺和底座。上平臺和底座之間設置6根液壓伸縮缸,通過計算機控制各個液壓缸長度和控制上平臺做空間6自由度的運動,以模擬車船等的真實動感[3]。船舶在波浪中運動,不需要油缸推動,故用6根拉繩即可達到目的。主要區(qū)別是,固定平臺安置在船模上方,運動平臺(船模)與固定平臺是軟連接。本方法與傳統(tǒng)的拉線木偶也有相似之處,木偶是在拉繩操縱下運動,本方案則是船模拉著繩子運動。
當海船船模足夠大(100kg以上),而單個拉繩拉力不足0.2公斤,并且合力向上,可以忽略繩子對船模運動的影響。儀器測到的運動量,可以反映船模的真實運動。圖2、圖3為測量方法示意。上平臺與岸固定,下平臺與船模連接。上平臺的傳感器中有收繩器,采用專用不銹鋼恒力彈簧材料,提供恒定的收緊張力。系泊船舶模型運動頻率一般不超過2Hz,屬于低頻振動,其幅值也很有限。因此拉繩狀態(tài)對收繩器的反應速度要求并不高。試驗中觀察到,隨著船模搖晃,柔性拉繩在收繩器的作用下一直處于拉直狀態(tài)。
圖 2 中:3—拉繩位移傳感器, 包括 31、32、33、34、35、36,詳見圖 3;41—拉繩式船舶運動測量裝置,有電源線與電源連接,信號線與計算機連接;42—數(shù)據(jù)采集與處理計算機;43—波浪中的船模;44—碼頭及岸模型;45—拉繩位移傳感器信號線;46—拉繩位移傳感器電源線;47—拉繩位移傳感器電源;48—水及波浪。
圖 3 中:1—上平臺,與岸邊固接;31、32、33、34、35、36—拉繩式位移傳感器,固定在上平臺 1,有電源線和信號線;11、12、13、14、15、16—拉繩孔,拉繩從孔口穿過與下平臺 2 相連;2—下平臺,與船模固接;21、22、23、24、25、26—拉繩與下平臺鉸接處,為 6個孔,拉繩穿過以后用螺栓頂緊。
根據(jù)實驗精度要求,確定以下測量指標。
六自由度運動測量范圍:
搖:橫搖-20°~+20°;縱搖-10°~+10°;艏搖-10°~+10°;
蕩:橫蕩-100mm~+100mm;縱蕩-100mm~+100mm;垂蕩-50mm~+50mm。
設計指標:
敏度:角度:<0.02°;長度:<0.01mm;
誤差:角度: <0.1°;長度:<0.1mm。

3 問題的描述
3.1 正解算法
本儀器主要用于海船模型試驗。本項目的關(guān)鍵是:船舶六自由度運動量與六根拉繩長度之間存在對應關(guān)系,需要保證在試驗測量范圍內(nèi)這種關(guān)系是唯一的。本系統(tǒng)需要測量的未知數(shù)是6個,因此只要6個拉繩傳感器布置得當,就可以根據(jù)6個已知的拉繩長度通過解方程組求出。6個拉繩的布置,要能夠反映如圖1所示船模6自由度的運動。如果采用更多的拉繩傳感器,則可得到超靜定系統(tǒng),測量精度會更高,但是對船模本身的束縛也更多。
上平臺1為世界坐標系,下平臺2為船上移動坐標系。假設兩個坐標系原來是重合的。船上坐標系 2,經(jīng)過繞 X、Y、Z 軸分別旋轉(zhuǎn) θ、ψ、φ 角度,再沿 X、Y、Z 軸做 x、y、z的位移,可以變換到試驗初始的位置。因此船或者平臺2在波浪作用下的六自由度運動可以用(θ、ψ、φ、x、y、z)六個量的變化表示。由(θ、ψ、φ、x、y、z)可以根據(jù)坐標空間變換過程得到下平臺各點的每時刻坐標,再根據(jù)與上平臺重合時的初始坐標,可以求出六根拉繩的長度[4]。這一過程是問題的正解。
設某點初始坐標為:pi=xi yi zi[ ]1 ,則經(jīng)以上轉(zhuǎn)換以后的坐標為p=pi×A。

根據(jù)p及pi即可求出兩點之間的距離,也就是拉繩的長度li。
3.2 逆解算法

單變量優(yōu)化算法如下:

當f( x1)>f( x2),則極大點m必在 (a,x2 )區(qū)間上,區(qū)間(x2,b)可以舍去。 當f( x1)<=f( x2 ), 則極大點m必在(x1,b)區(qū)間上,區(qū)間(a,x1 )可以舍去。在剩下來存在極大值的區(qū)間,重復上述過程,直到abs( x1-x2 )小于設定的誤差范圍。 即可得到極值點m=(x1+x2 )/2。


4 開發(fā)環(huán)境
整個測試系統(tǒng)硬件由上下平臺拉繩傳感器和計算機組成[6-7]。軟件環(huán)境如下:
操作系統(tǒng):Winxp
編程語言:Delphi6.5;Matlab6.0
通信協(xié)議:串口RS485
5 算法驗證
為了驗證六分量測量算法的可靠性,先給定船模運動量的時間系列值,由此利用正解算法計算出6根繩子的長度變化過程。再根據(jù)繩子長度變化過程,利用逆解算法計算船模的運動量。如果逆解算法得到的船模運動量與給定的運動量一致,則認為算法可靠。
科研樣機上平臺6點均布,外接圓半徑250mm;6點角度分別為:0,90,120,210,240,330。下平臺6點均布,外接圓半徑200mm;6點角度分別為:30,60,150,180,270,300。小圓與船固定,大圓與岸固定。設Rx1(°)為已知的下平臺繞x軸的轉(zhuǎn)動,Dz1(mm)為已知的下平臺沿z軸的垂向運動,即升沉。同時還存在一個繞y軸的轉(zhuǎn)動。其余3個自由度運動量假設均為零。由已知的運動量根據(jù)正解算法計算出6根拉繩的長度,再由6根拉繩的長度用逆解算法計算出運動量。已知的運動量和計算出的運動量之間的差別在小數(shù)點后3位,計算精度主要取決于計算時采用的舍入精度。
為了驗證算法的穩(wěn)定性,在第一根拉繩長度數(shù)值上加上了1mm的隨機誤差,計算結(jié)果見表1。其中Rx2(°)為計算出的下平臺繞x軸的轉(zhuǎn)動,Dz2(mm)為計算出的下平臺沿z軸的垂向運動。表1中,dRx<0.1°為下平臺繞x軸的轉(zhuǎn)動誤差,dRz<0.11mm為下平臺沿z軸的垂向運動誤差。樣機采用的拉繩位移傳感器測量誤差0.1mm,遠小于1mm,因此本系統(tǒng)可以達到角度誤差:<0.1°和長度誤差<0.1mm的技術(shù)要求。

表1 船模運動6分量算法驗證計算Tab.1 Arithmetic validation for ship motion of six degrees of freedom

續(xù)表1
驗證計算結(jié)果表明,該算法穩(wěn)定可靠。由于計算比較復雜,樣機采用了先測量6根拉繩的長度,等采樣結(jié)束再計算6分量的辦法。
6 測試結(jié)果
在某礦石碼頭工程船舶運動物理模型試驗中,船舶模型按1:80設計。其主要尺度見表2。在空船橫向波浪作用下,船舶六自由度試驗測量結(jié)果見圖5。圖中數(shù)據(jù)為模型值。可見橫搖幅度最大,周期性明顯,縱搖幅度很小,周期性也很明顯。首搖曲線表明,首搖周期要遠大于橫搖和縱搖,并且基本屬于不規(guī)則運動。縱蕩是長周期的運動,而橫蕩與垂蕩則周期較短,其中垂蕩規(guī)律性最好。試驗條件下測得六分量的最大值約為:橫搖1.8°、縱搖 0.2°、首搖 0.5°以及縱蕩 10mm、橫蕩18mm、垂蕩3mm。采樣速率大于50Hz,按照采樣定理,滿足船舶運動周期對儀器采樣速度的要求。六分量試驗數(shù)據(jù)合理,達到了預期的目的。
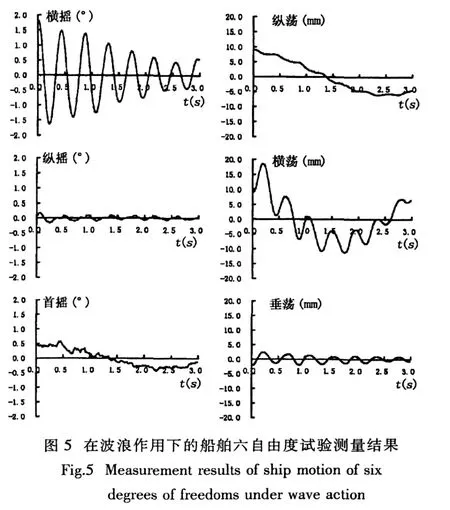

表2 船舶主要尺度表Tab.2 Main dimensions of ship
7 結(jié) 語
拉繩式六分量測量裝置,具有原理簡單、加工和使用方便等特點。系統(tǒng)成功實現(xiàn)了六分量優(yōu)化算法。可以采用此裝置研究系泊船舶在風浪流作用下的運動。通過試驗表明:該裝置測量精度較高,達到了預期的目的。
[1]吳秀桓.船舶操縱性與耐波性[M].北京:人民交通出版社,1999:25-31.
[2]姜海榮.基于雙CCD非接觸式浮體六自由度測試系統(tǒng)的研制[D].大連:大連理工大學,2005:52-58.
[3]郝軼寧.六自由度運動姿態(tài)模擬系統(tǒng)的研究[J].北京理工大學學報,2002,22(3):331-334.
[4]倪建斌.Matlab在Stewart平臺正解中的應用[J].機械工程師,2005(11):92-94.
[5]李樹軍.一種求解6-3構(gòu)型并聯(lián)機器人機構(gòu)位置正解的逼近算法[J].機械科學與技術(shù),2002,21(1):81-85.
[6]羅 強.Delphi 4.0下TeeChart控件的編程方法[J].長沙大學學報,1999,13(4):50-52.
[7]李忠明.基于Delphi6的串口通信程序?qū)崿F(xiàn)方法研究[J].蘭州大學學報(自然科學版),2004,40(4):41-44.
Contact measurement of six freedom for naval tank
MENG Xiang-wei1,2,GAO Xue-ping1
(1 School of Civil Engineering,Tianjin University,Tianjin 300072,China;
2 Tianjin Research Institute for Water Transport Engineering,Tianjin 300456,China)
The measuring device was designed in naval tank experiment.The ship motion of six freedom acting with wave can be measured by this device.Six rope-type sensors were fixed with the top of naval tank.Six ropes were pulled when ship model was sloshing.According to length variation of six ropes,six freedom was calculated.It is indicated that six freedom of ship model could be responded with the measuring device.
naval tank;ship model;wave;six freedom;experimental study
U661.73
A
1007-7294(2010)04-0379-06
2009-04-24
2010-03-01
孟祥瑋(1965-),男,研究員,主要從事港口航道工程水力學研究,E-mail:uptonmeng@126.com。
猜你喜歡
艦船科學技術(shù)(2022年14期)2022-09-22 03:07:40
艦船科學技術(shù)(2022年2期)2022-03-29 01:12:44
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國船檢(2017年3期)2017-05-18 11:33:09
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
