磁懸浮隔振器的自尋優前饋控制
2010-06-07 07:53:56段小帥
船舶力學 2010年7期
段小帥,梁 青,王 永
(中國科學技術大學 自動化系,合肥 230027)
磁懸浮隔振器的自尋優前饋控制
段小帥,梁 青,王 永
(中國科學技術大學 自動化系,合肥 230027)
以船舶的振動主動控制為背景,基于自行研制的磁懸浮隔振器,提出了前饋控制的主動隔振方案,設計了對控制器參數在線自尋優的算法。該算法能夠用于具有非線性特性的磁懸浮隔振器,并且不需要建立主動力到控制目標點的通道模型。在磁懸浮隔振系統上的實驗結果表明,該控制算法取得了良好的減振效果,并且當系統受到擾動后,能夠實現尋優過程的自動啟動。
磁懸浮隔振器;主動隔振;前饋控制;自尋優算法;非線性
1 引 言
不論是軍艦還是民船都存在著不同程度的振動,過度的船舶振動容易引發嚴重的后果,因此船舶的振動控制一直是人們非常關注的問題。其中隔振技術是振動控制的一個重要研究方向[1]。根據隔振時是否需要外界輸入能量,隔振技術可以分為主動隔振與被動隔振。由于主動隔振能夠克服被動隔振對低頻振動難以有效抑制的缺點,近年來主動隔振技術日益受到重視[2-3]。
本文研究的對象是一種磁懸浮主動隔振器。隔振器采用電磁懸浮技術,該技術在磁懸浮列車[4-5]、磁懸浮軸承[6-7]等方面的應用,已經取得了一定的研究成果,但針對電磁懸浮隔振系統的研究還不深入,采用電磁懸浮技術的隔振器尚不多見。磁懸浮隔振器由銜鐵和電磁鐵兩部分組成,電磁鐵鐵芯上繞有線圈,當線圈中通入電流時,電磁鐵的磁場會產生電磁力與銜鐵相互作用,這樣通過控制通入線圈的電流可以控制電磁力,進而達到主動隔振的目的。
本文提出了一種基于前饋控制的主動減振方案,設計了控制器參數在線自尋優算法[8-9],該算法應用于帶有非線性特性的主動隔振系統的研究還未見報道,并且該算法不需要建立主動力到控制目標點的通道模型。對單頻振源激勵的磁懸浮隔振系統進行振動主動控制實驗的結果表明,該控制方法在磁懸浮隔振系統上取得了良好的減振效果。并且當系統受到擾動后,能夠實現控制器參數尋優過程的自動重新啟動。
2 前饋控制律設計
在振源頻率設定的情況下,擾動信號可以近似認為是恒定的。因此可以采用前饋控制抵消擾動信號產生的影響。測得的正弦信號經過功率放大后驅動磁懸浮隔振器,調整此正弦信號的相位和幅值,使其能恰好抵消擾動信號的作用。
對于任給的正弦信號,通過圖1對其進行相位和幅值的調整。
當 K1=cosθ,K2=-ωsinθ,K0=A2/A1時,


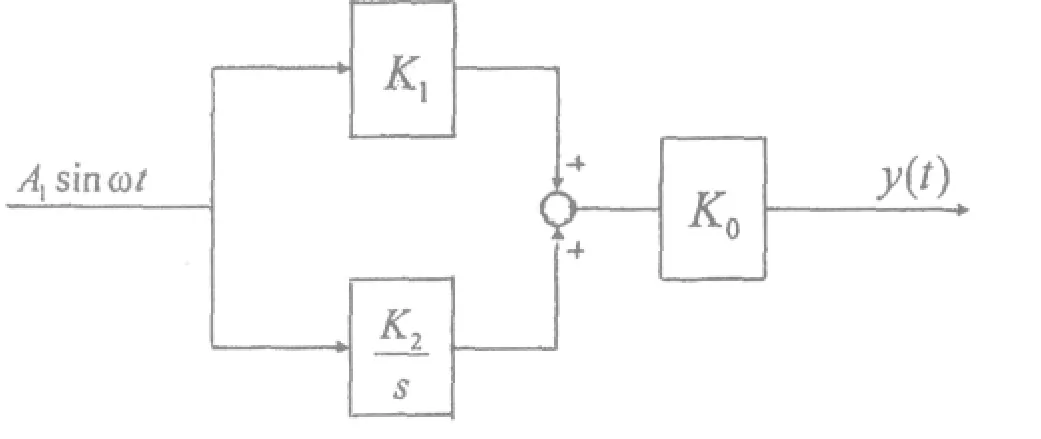
圖1 調整相位和幅值原理圖Fig.1 Schematic diagram of the phase and amplitude adjustment
可見,通過上述相位和幅值調整環節,可以將輸入信號的相位移動θ,將幅值由A1調整為A2,并且相位調整環節不會影響幅值調整環節,兩者是相互獨立的。
根據上述理論,可以設計控制系統如圖2。
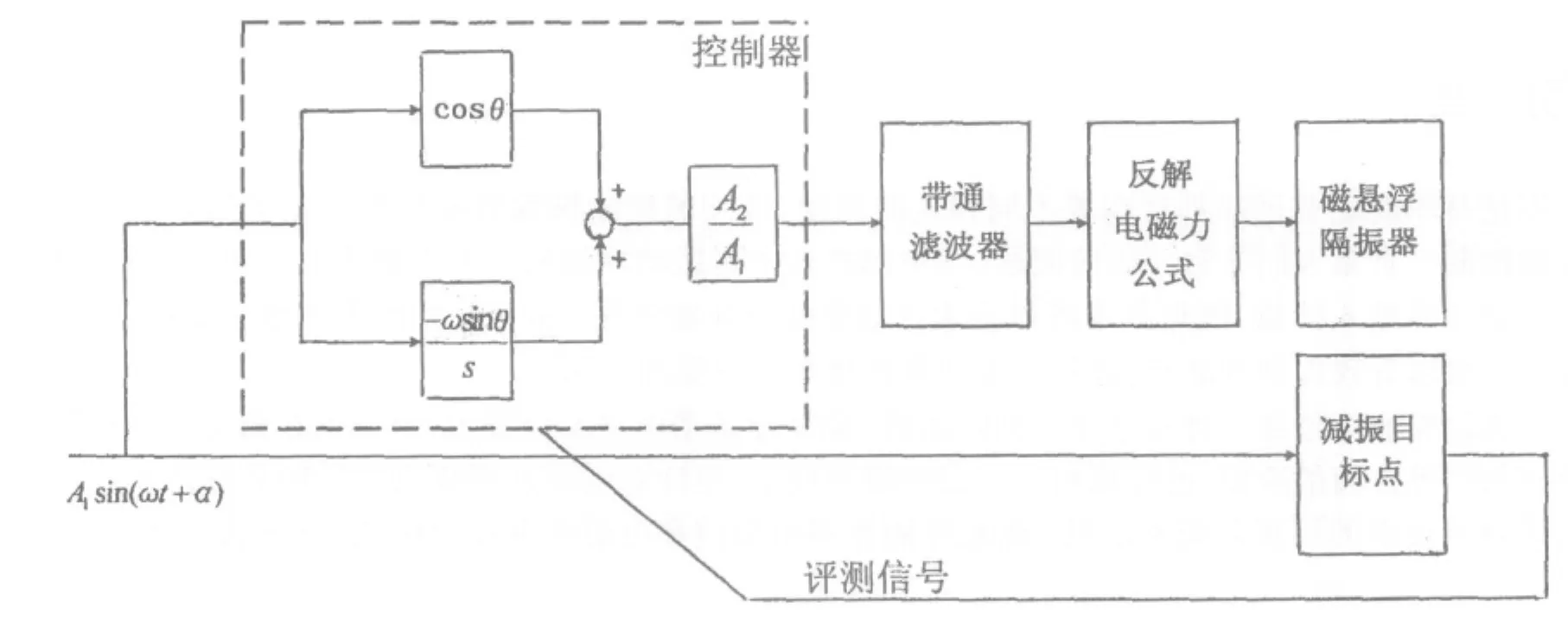
圖2 控制系統原理圖Fig.2 Schematic diagram of control system
圖中 A1sin(ωt+α)為振源工作所需要的驅動信號,同時作為參考信號引入到前饋控制器的輸入,經過控制器計算后得到控制信號。為了濾除積分引入的直流分量,設計了3階巴特沃茲帶通濾波器。
由于本文研究的對象磁懸浮隔振器是一個非線性的環節,即電磁力與線圈電流、氣隙之間是非線性的關系,在計算得到控制器的輸出后,根據位移傳感器實時測得的氣隙值,反解電磁力公式,得到電流值經功率放大后驅動磁懸浮隔振器工作,達到振動控制的目的。同時以減振目標點的加速度信號作為反饋信號,對前饋控制器進行監測,以調節控制器的參數θ和K0,實現參數自尋優。
3 在線自尋優算法
由上面討論知,調節控制器參數可分兩步進行:先調節相位,得到最優相移θ,然后調節幅值增益,得到最優K0,這樣可把減振目標點的振動盡可能抵消。為了克服手動調節參數不易實現且難以在線調整的缺點,本文采用了在線自尋優的算法,在系統運行過程中,自動尋找最優控制器參數。
用指標函數

來衡量控制器的性能,其中T為采樣周期,取T=1ms,a n()T為減振目標點的加速度信號采樣值,考慮到系統的穩態過程,取每10s的最后1s計算指標函數,即取N=1 000。搜索的過程采用“坐標輪換”和“變步長搜索”相結合的辦法[10],搜索算法為:
(1)初始化起始步長。
(2)若搜索第一步J增大,則將步長方向取反,執行(3);否則直接執行(3)。
(3)若J減小,則按此步長繼續搜索;否則,將步長反向且乘以0.618,若步長減小后達到設定的下限則執行(4),否則繼續搜索。
(4)記錄當前的最優參數θ和K0。
同時,對該算法設定重啟尋優的機制。當尋優過程結束,控制器按照當前的最優參數θ和K0運行時,如果磁懸浮隔振器運行參數發生變化或者由于外部擾動造成隔振性能變差,尋優過程將自動運行,重新尋找最優的控制器參數,使減振過程持續不斷地運行下去。
4 實驗研究
4.1 電磁力模型
為了準確地對磁懸浮隔振器進行控制,需要建立電磁力模型,即電磁力與線圈電流、氣隙之間的關系。通過基于MTS809的實驗建模方法[11],用最小二乘法辨識得到了電磁力公式。這種方法得到的電磁力公式沒有對磁路進行任何假設,且考慮了加工工藝對電磁力的影響,因此較為準確。
得到的上下電磁鐵電磁力公式分別為:

其中,F為電磁鐵產生的電磁力,i為通入線圈的電流,g為氣隙大小。
4.2 實驗系統
帶有振動主動控制環節的磁懸浮隔振器實驗系統原理圖如圖3所示。
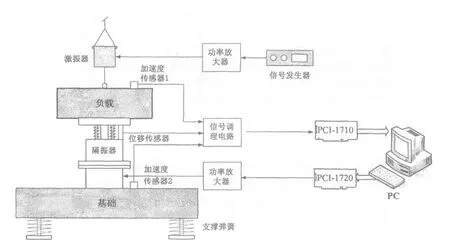
圖3 磁懸浮隔振器實驗系統原理圖Fig.3 Experimental system diagram of electromagnetic suspension vibration isolator
本實驗系統主要由以下模塊組成:負載、磁懸浮隔振器、基礎及支持基礎的支撐彈簧等裝置;激振器、與激振器配套的功率放大器以及產生功率放大器輸入信號的信號發生器;三個傳感器及它們的信號調理電路、PC機及用于振動主動控制的數據采集卡、數模轉換卡和功率放大器。
4.3 實驗步驟
實驗步驟如下:
(1)按照實驗原理圖連接磁懸浮隔振系統各個部件。PC機通過PCI1710板卡采集四路信號:相對位移信號用于計算磁懸浮隔振器的氣隙大小,基礎加速度信號用于計算評測控制器的性能指標,負載加速度信號用于監測負載加速度的變化,信號發生器的輸出信號用作前饋控制器的輸入信號;通過PCI1720板卡輸出兩路信號,它們經過功率放大器后驅動上下兩塊電磁鐵。
(2)按照設計的控制律編寫PC機應用軟件的控制律部分。系統的采樣頻率為1 000Hz,實驗時間為850s,實驗過程的前20s不施加振動主動控制。
4.4 實驗結果
實驗效果如圖4:
由圖可以看出當相位和幅值都尋找到最優值后,控制器按照最優參數運行,系統減振效果良好。當系統受到擾動后,尋優過程會自動重啟,并較快地再次尋找到最優控制器參數。
用控制前后基礎加速度基頻的幅值之比作為標準來衡量振動主動控制的減振效果,Ab()f為未施加振動主動時的頻譜曲線峰值,Ac()f為施加振動主動控制后的頻譜曲線峰值,則減振效果
5 結 論
本文研究了采用主動隔振方案實現船舶的振動控制,在自行研制的磁懸浮隔振器上進行前饋控制,設計了控制器參數的在線自尋優算法。對具有非線性特性的磁懸浮隔振器進行振動主動控制實驗,取得了超過25dB的減振效果。并且當系統受到擾動后,尋優過程會自動啟動,重新找到最優的控制器參數。
[1]江國和,沈榮瀛,華宏星等.艦船機械設備沖擊隔離技術研究進展[J].船舶力學,2006,10(1):135-144.
[2]張 磊,付永領,劉永光等.主動隔振技術及其應用與發展[J].機床與液壓,2005,2:5-8.
[3]藺玉輝,靳曉雄,肖 勇.振動主動控制技術的研究與發展趨勢[J].上海汽車,2006,7:29-31.
[4]Ono M,Koga S,Ohtsuki H.Japan’s superconducting maglev train[J].Instrumentation&Measurement Magazine,IEEE,2002,5(1):9-15.
[5]Zheng J,Deng Z G,Wang L L,Liu L,Zhang Y,Wang S Y,Wang J S.Stability of the maglev vehicle model using bulk high Tc superconductors at low speed[J].Applied Superconductivity,IEEE Transactions on,2007,17(2):2103-2106.
[6]Yeh T J,Chung Y J,Wu W C.Sliding control of magnetic bearing systems[J].Journal of Dynamic Systems,Measurement,and Control.2001,123(3):353-362.
[7]Zong M,Wang F X,Sun Y D,Wang J Q.Stability analysis of magnetic bearing with resonance circuit[C].Power Electronics and Motion Control Conference,2006.IPEMC‘06.CES/IEEE 5th International,2006,2(14-16):1-5.
[8]王 永,張國慶,陳 光.斯特林制冷機的自尋優前饋振動控制[J].振動工程學報,2005,18(3):261-265.
[9]王 永,董卓敏,陸國華等.微型斯特林制冷機振動主動控制[J].實驗力學,2003,18(4):506-512.
[10]孫德敏.工程最優化方法及應用[M].合肥:中國科學技術大學出版社,1997:102-104.
[11]孟令雷,倪向貴,王 永等.基于MTS809的磁懸浮隔振器電磁力測量[J].自動化與儀表,2009,24(3):4-7.
Self-optimizing feed-forward control of electromagnetic suspension vibration isolator
DUAN Xiao-shuai,LIANG Qing,WANG Yong
(Department of Automation,University of Science and Technology of China,Hefei 230027,China)
In the background of active vibration control of ship,an active vibration isolation program of feedforward control was proposed,and an online self-optimizing algorithm for the controller parameters was designed based on the electromagnetic suspension vibration isolator,which was designed independently.The algorithm can be used for the electromagnetic suspension vibration isolator with non-linear characteristics,and does not require the channel model of active force to the target point.The experimental results on the electromagnetic suspension vibration isolation system show that the control algorithm obtains a good vibration control effect,and the optimization process can restart automatically with system disturbances.
electromagnetic suspension vibration isolator;active vibration isolation;feed-forward control;self-optimizing algorithm;non-linear
TP273; O32
A
1007-7294(2010)07-0795-05
2009-12-08
段小帥(1985-),男,中國科技大學自動化系碩士生。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55