基于多剛體動力學和規則協調的汽車EPS與ASS建模與控制
2010-05-31 09:55:40王其東秦煒華陳無畏
中國機械工程 2010年14期
王其東 秦煒華 陳無畏
合肥工業大學,合肥,230009
0 引言
隨著科技的發展,為提高汽車的舒適性和主動安全性,各種動力學控制系統(如EPS(electric power steering)、ASS(active suspension system)、ESP(electric stability program)等)相繼應用到了現代汽車上。其中就EPS和ASS兩系統來說,由于輪胎側向力和垂向力的相互耦合,轉向系統和懸架系統互相影響,而單獨的子系統是僅針對改善某一性能指標而設計的,無法避免其他系統的干擾,因此對于這些系統必須進行集成控制,利用它們的功能互補,更好地提高汽車的穩定性、安全性等綜合性能。在系統的集成控制設計中存在兩個重要問題——模型的建立和控制策略的確定。
通常,集成控制采用的大多是牛頓力學模型[1-2]。由于汽車是由多構件組成的復雜系統,并具有非線性等特點,而多剛體動力學采用程式化的方法,在解決大型三維機械系統的分析與綜合問題上具有一定的優勢[3-4]。文獻中采用的多剛體模型一般利用汽車動力學仿真軟件,如采用ADAMS進行建模[5]。但是在底盤集成控制研究中,涉及多個運動參數,且軟件具有封裝性,不便對模型進行控制和修改,因此采用人工建立的、能反映系統之間聯系、便于施加控制的多剛體模型。對于集成控制策略,通常采用集中式控制[2,6],但其控制器在設計上困難大,設計的周期長,不便于分工協作。而分層-監督式控制策略可盡可能充分地利用原有的控制模塊,具有容錯處理的能力,可提高系統的可靠性。
1 系統建模
1.1 整車多剛體動力學模型
汽車是一個復雜的多自由度空間運動系統,綜合考慮精度和研究的需要,采用多剛體動力學中的笛卡兒坐標系建立簡化的裝備電動助力轉向和主動懸架系統的整車模型。整體坐標系xyz和整車多剛體結構示意圖如圖1所示。
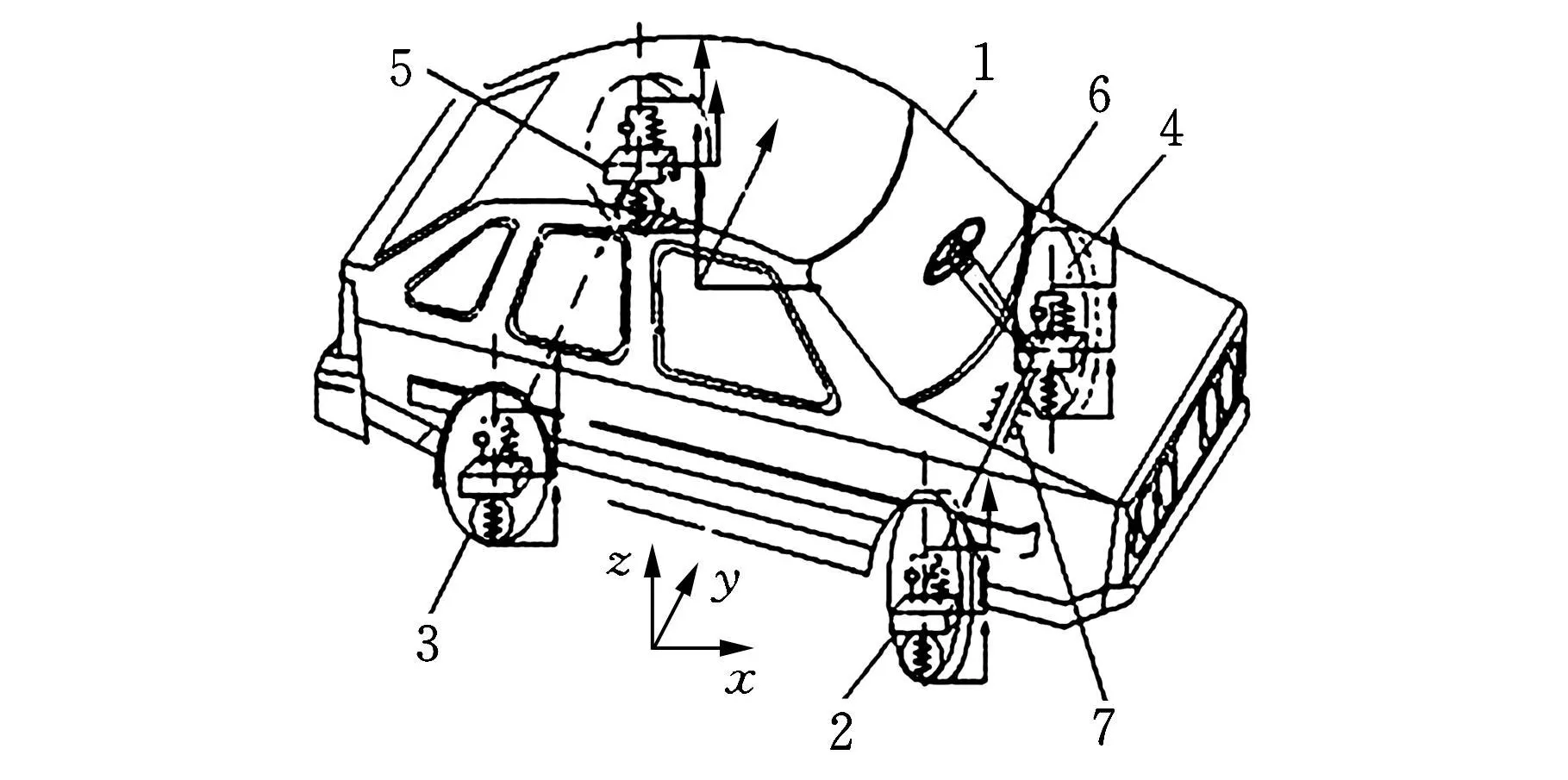
圖1 整車多剛體結構示意圖
整車由車身、4個車輪組件、橫拉桿和轉向柱7個構件組成,每個構件的連體坐標系固定在質心處。采用麥克弗遜滑柱式前懸架和縱向拖臂式后懸架,每個前輪組件通過球面-轉動復合副和支柱副與車身相連接;后懸架被視作是通過轉動副連接在車身的縱擺臂;ASS系統的彈簧-阻尼-可控作用力裝置(translational spring-damp-actuator,TSDA)作為多體動力學中的力元素進行建模。連接橫拉桿和前輪組件的拉桿模型簡化為球面-球面復合副。橫拉桿與轉向柱通過齒輪齒條副連接。EPS系統的助力矩作用在轉向柱上。系統共有34個運動約束方程和7個歐拉參數歸一化約束方程。
1.1.1 整車多剛體動力學方程
構件空間廣義笛卡兒坐標為

式中,xi、yi、zi為構件的位置坐標;e0i、e1i、e2i、e3i為構件的姿態坐標歐拉四元數。
整車動力學方程[3]為

式中,N為構件i的質量矩陣;B為雅可比矩陣,其元素為各約束方程左邊的多項式對廣義坐標依次求偏導的值,是系統坐標與時間的函數;λ為拉格朗日乘子陣;γ#為加速度方程右項;r為位置坐標;J′為轉動慣量,由于車輛對其中心線的對稱性,只考慮車身x方向和z方向的慣性積Ixz,其他方向的慣性積近似為零;f、n′分別為作用在構件上的力和力矩,包括轉向盤操縱力矩、電動機助力矩、輪胎側向力和回正力矩、輪胎鉛垂力、懸架的TSDA力以及構件的重力和系統內部的摩擦阻力矩;ω′為角速度矢量;ω′為由角速度分量構成的反對稱矩陣。
設車身x、y、z三個方向的角速度為(p,q,r),p、q、r分別為側傾、俯仰和橫擺三個方向的角速度。方程展開式中x、y、z三個方向的角速度相互關聯,體現了車輛姿態(橫擺、側傾、俯仰)的相互耦合;角速度與歐拉參數之間的運動學方程為
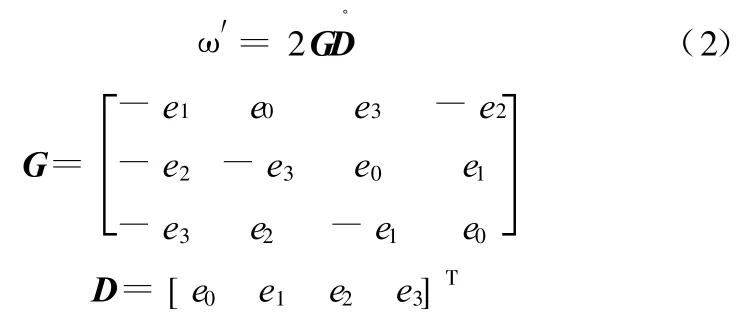
式中,e0、e1、e2、e3為歐拉四元數。
1.1.2 力和力矩
車輛在實際行駛過程中各部件上的受力情況非常復雜,本文根據力的等效作用原理,將實際力系簡化為作用于剛體質心的主矢和主矩,輪胎由于自身形變產生的受力被簡化為作用于本身的力元。
(1)電動機助力矩。電動機助力矩大小由電動機模型確定,電動機模型計算公式為

式中,it為電動減速機構減速比;Ka為電動機扭矩系數;K b為電動機反電勢常數;R0為電樞電阻;U為電動機端電壓;δ1為轉向小齒輪轉角。
(2)懸架TSDA力。設TSDA元件分別連接在兩構件的Pa和Pb點,則兩點的矢量為

式中,l為TSDA元件長度;ra、rb分別為構件a、b的位置坐標分別為連體坐標系中Pa點和Pb點的位置矢量;分別為中各分量構成的反對稱矩陣分別為構件a、b的角速度矢量;Aa、Ab分別為構件a、b的方向余弦陣。
TSDA元件作用在構件a上的廣義力為
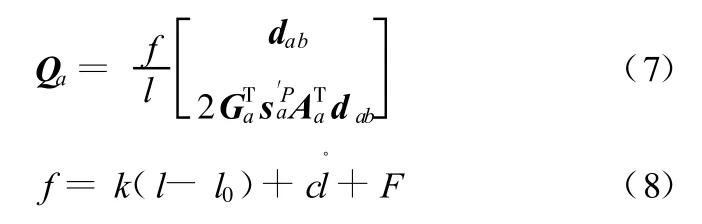
其中等式右邊第一項為彈簧力,第二項為阻尼力,第三項為主動懸架可控作用力。
(3)輪胎鉛垂力。輪胎鉛垂力Qz j的計算公式為

式中,zgj(t)為路面輸入;kzj為輪胎垂直剛度;R為輪胎自由半徑;zj為輪胎垂直位移。
其中路面輸入采用濾波白噪聲路面不平度位移時域模型,表達式為

式中,G0為路面不平度系數;wj為均值為零的Gauss白噪聲;f0為下截止頻率;v為車速。
(4)輪胎側向力和回正力矩。輪胎側向力和回正力矩由輪胎模型確定。采用PACEJKA[7]非線性輪胎聯合工況模型,其輸入為輪胎法向反力、輪胎側偏角和滑移率,輸出為側向力F y及回正力矩Mz。輪胎模型方程式為
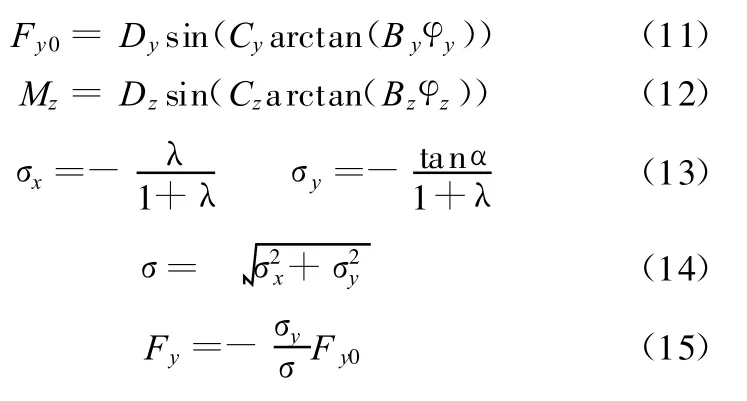
式中,λ為車輪滑移率;α為車輪側偏角;By、Bz為輪胎剛度因子;Cy、Cz為輪胎模型常數;Dy、Dz為輪胎峰值因子;φy、φz為關于法向力和側偏角的函數。
多剛體模型中,前后輪側偏角計算公式為
1.1.3 方程求解
式(1)為非線性微分 —代數混合方程組,處理此類方程組的數值方法有直接法和坐標分離法等。本文采用直接法[3]的算法編程求解,先解式(1)求得,然后根據歐拉參數和角速度之間的關系式計算并對歐拉參數廣義坐標和位置坐標進行積分。輸入式(1)中各矩陣的具體形式和初始位置、速度條件,即可解得構件的速度以及加速度等狀態量的時間歷程。
2 控制器設計
設計了EPS、ASS兩個子控制器和基于規則的中央控制器。各子控制器又根據不同工況下控制目標的主次設計了兩種工作模式對執行器進行控制。中央控制器是一個決策控制器,其功能如下:根據對駕駛員意向的識別,對子系統的監督、檢測和對汽車運動狀態的觀測,給出各子系統兩種工作模式間的切換指令,使子系統切入相應的工作模式,達到EPS和ASS兩個系統協調控制的目的,以更好地改善汽車平順性、操縱穩定性等整體控制效果。
2.1 ASS控制器
在直行過程中,ASS針對優化乘適性進行控制;在轉向過程中,車身會產生側傾、橫擺等姿態變化,而采用ASS的姿態控制能增強車輛的穩定性。
2.1.1 模式一(以提高平順性為主要目標)
在該模式,ASS控制器以提高汽車行駛平順性為目標,控制車身垂直加速度和俯仰角加速度。采用增量式PID控制策略,分別以車身俯仰角加速度偏差和4個懸架上方車身垂直加速度偏差作為輸入,輸出為控制力 uθ和 u1、u2、u3、u4,疊加得懸架可控力。控制式為

式中,u(k)為可控力;e(k)為控制偏差;k為采樣序號,k=0,1,2,…;KP為PID控制器的比例參數;KD為PID控制器的微分參數;KI為PID控制器的積分參數。
其中,前左右懸架可控力[8]分別為

后左右懸架可控力為
式中,lf,lr分別為前后車輪到車輛質心的距離。
2.1.2 模式二(以控制轉向時的車身姿態為主要目標)
在該模式,ASS控制器作為姿態控制器,控制汽車轉向工況下的側傾和橫擺,懸架可控力的變化量由基于比例切換函數的滑模變結構控制策略得到。
切換函數為

式中,c為斜率;e為實際值與期望值的偏差。
根據比例切換控制方法,控制率為

式中,α、β為大于零的常數。
(2)橫擺控制:通過調整主動懸架控制力來調節輪胎力,間接產生輔助的穩定橫擺力矩。以為輸入變量,其中r0為期望橫擺角速度;懸架可控力的變化量為輸出變量。
期望橫擺角速度參考公式[9]為

式中,K為車輛穩定性因數;L為軸距;δ為前輪轉角。
在多剛體動力學模型中,根據歐拉參數的定義,并假設輪胎是鉛垂的,計算式為
式中,e0fl、e0fr為前左右輪的歐拉參數。
在模式二中,考慮到車輛轉向行駛工況下,側傾和橫擺相互耦合,因此定義一個加權因子的值根據r和的大小實時確定,此時懸架可控力F′j為

2.2 EPS控制器
汽車在穩態轉向時,EPS主要針對轉向輕便性進行控制;若汽車進入失穩狀態,比如過度轉向,此時必須減小助力,削弱駕駛員快速改變前輪轉向角的能力,增強路感。
2.2.1 模式一(以改善轉向輕便性為主要目標)
在該模式下,EPS控制器采用增量式PID控制策略,控制表達式同式(17)和式(18)。其中控制偏差為目標電流與電動機實際反饋電流的差值,控制器輸出為助力電動機電壓。目標電流由電動機助力特性曲線確定,如圖2所示。
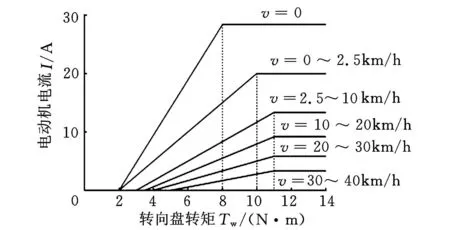
圖2 電動機助力特性曲線
2.2.2 模式二(以提高主動安全性為主要目標)
在該模式下,EPS控制器在穩態轉向助力目標值的基礎上乘以小于1的增益系數,以降低系統的助力矩。
2.3 中央控制器
中央控制器采用基于規則的模糊控制方法,實現各子控制器不同工作模式之間的平穩轉換,控制框圖如圖3所示。規則如下:
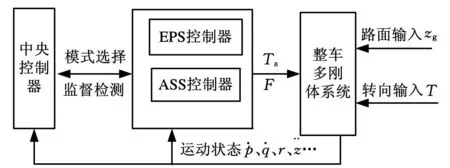
圖3 分層-監督式協調控制框圖
規則一 直行工況時,ASS控制器以模式一進行控制;EPS系統不工作。
規則二 轉向工況時,中央控制器向ASS控制器發出控制指令,轉換到模式二進行控制;同時中央控制器根據實際橫擺角速度與期望橫擺角速度的偏差er(以左轉向產生的橫擺角速度為正),結合轉向盤轉角δ的大小識別車輛轉向特性。例如車輛左轉時,er>0,車輛存在過度轉向現象,中央控制器向EPS控制器發出控制指令,采用模式二進行控制,并確定模式二中增益系數的大小,減小過度轉向的趨勢,否則指令EPS以模式一進行控制。
3 仿真計算與結果分析
對上述系統,在MATLAB/M文件中編程進行仿真,包括多剛體動力學方程和各控制器的聯立求解,主要用到MATLAB的矩陣運算功能、數值積分函數等,其中矩陣運算符“”不需要計算矩陣的逆而直接進行除運算,避免了被除矩陣的奇異性帶來的求解問題。某參考車型主要參數見表1。

表1 車輛參數
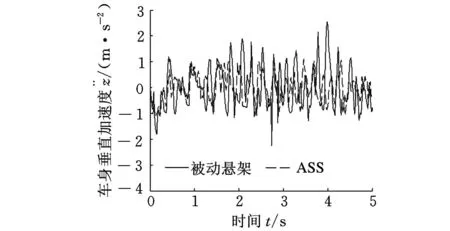
圖4 車身垂直加速度
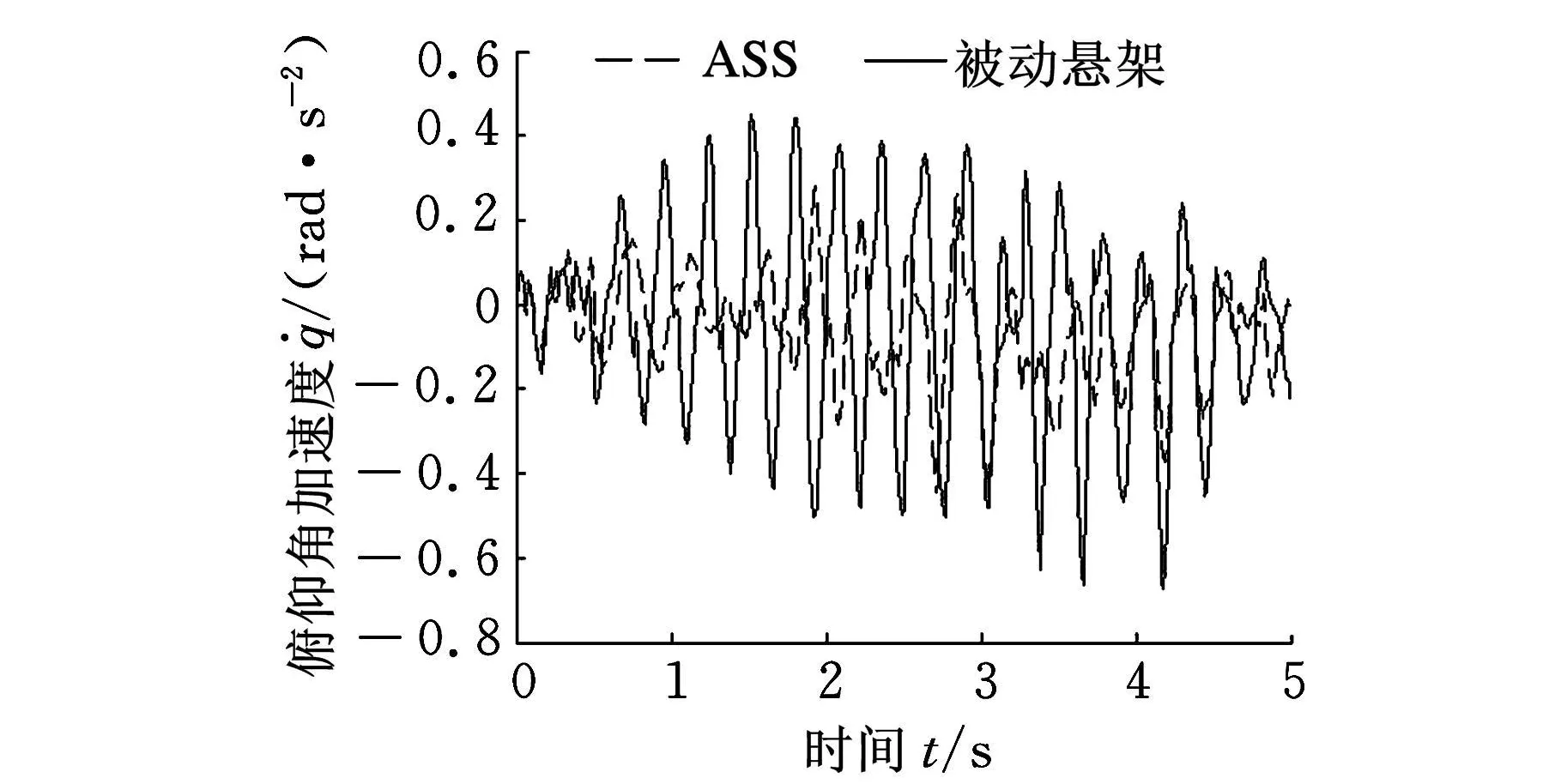
圖5 俯仰角加速度
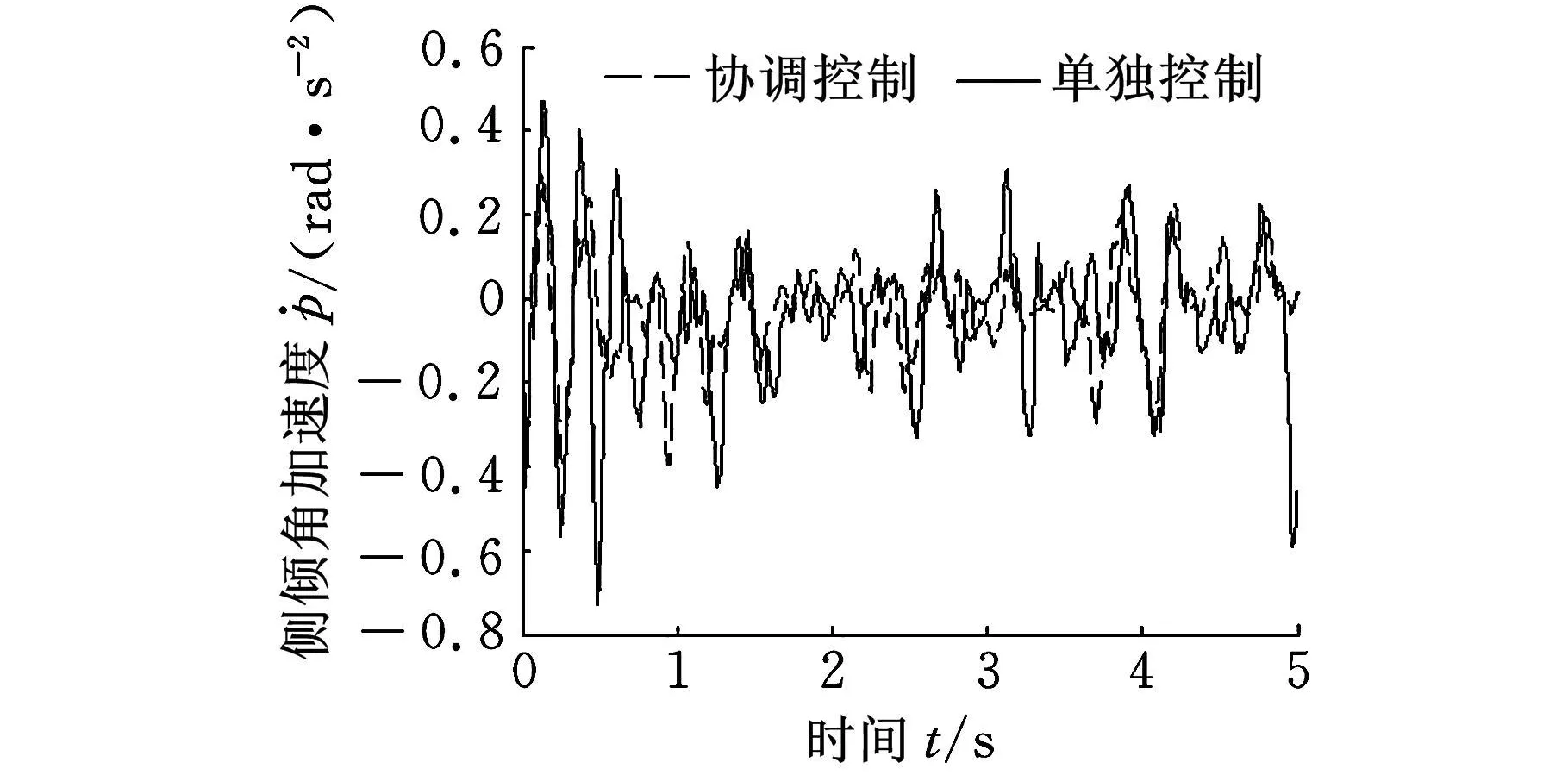
圖6 側傾角加速度
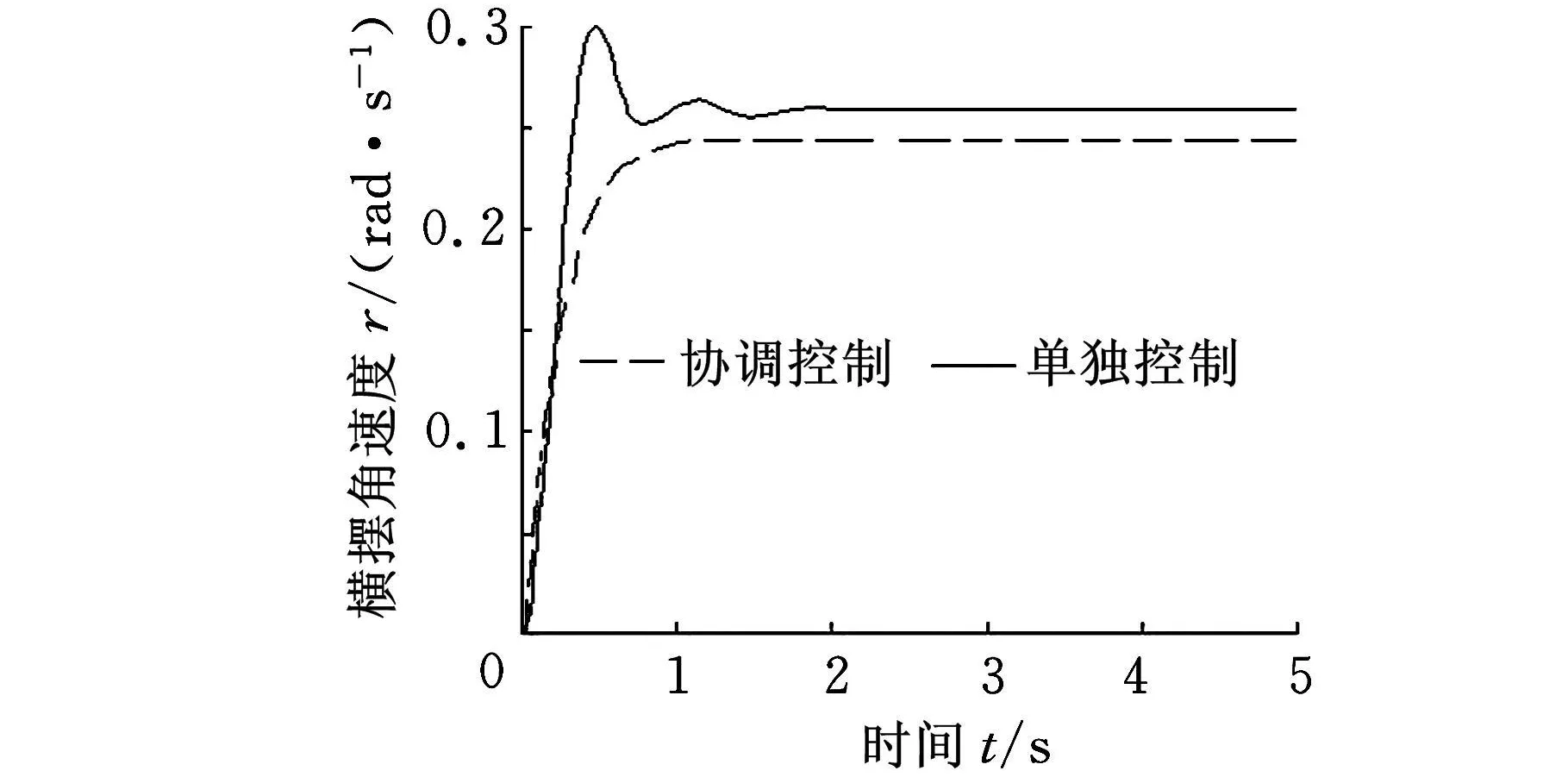
圖7 橫擺角速度
為了更好地說明協調控制和各個子控制器獨立控制時的差異,在工況二下將兩系統協調控制和ASS獨立控制(指ASS僅用模式一控制)時的側傾角加速度相對比,仿真結果見圖8。協調控制后的側傾角加速度均方根值從0.0375rad/s2降低到0.0227rad/s2,表明ASS系統參與協調控制時,有效降低了車輛的姿態變化,提高了行駛安全性;將兩系統協調控制和EPS獨立控制(指EPS僅用模式一控制)時的橫擺角速度相對比,仿真結果見圖9。協調控制后的橫擺角速度波動減小,表明EPS系統參與協調控制時,除了保證轉向輕便性,對整車的穩定性也有一定改善。由此可見,EPS與ASS協調控制是有意義的。
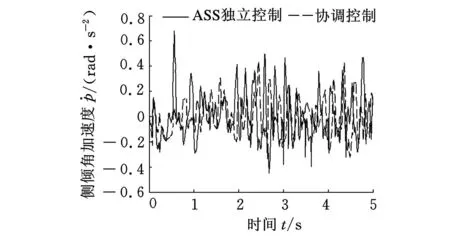
圖8 側傾角加速度
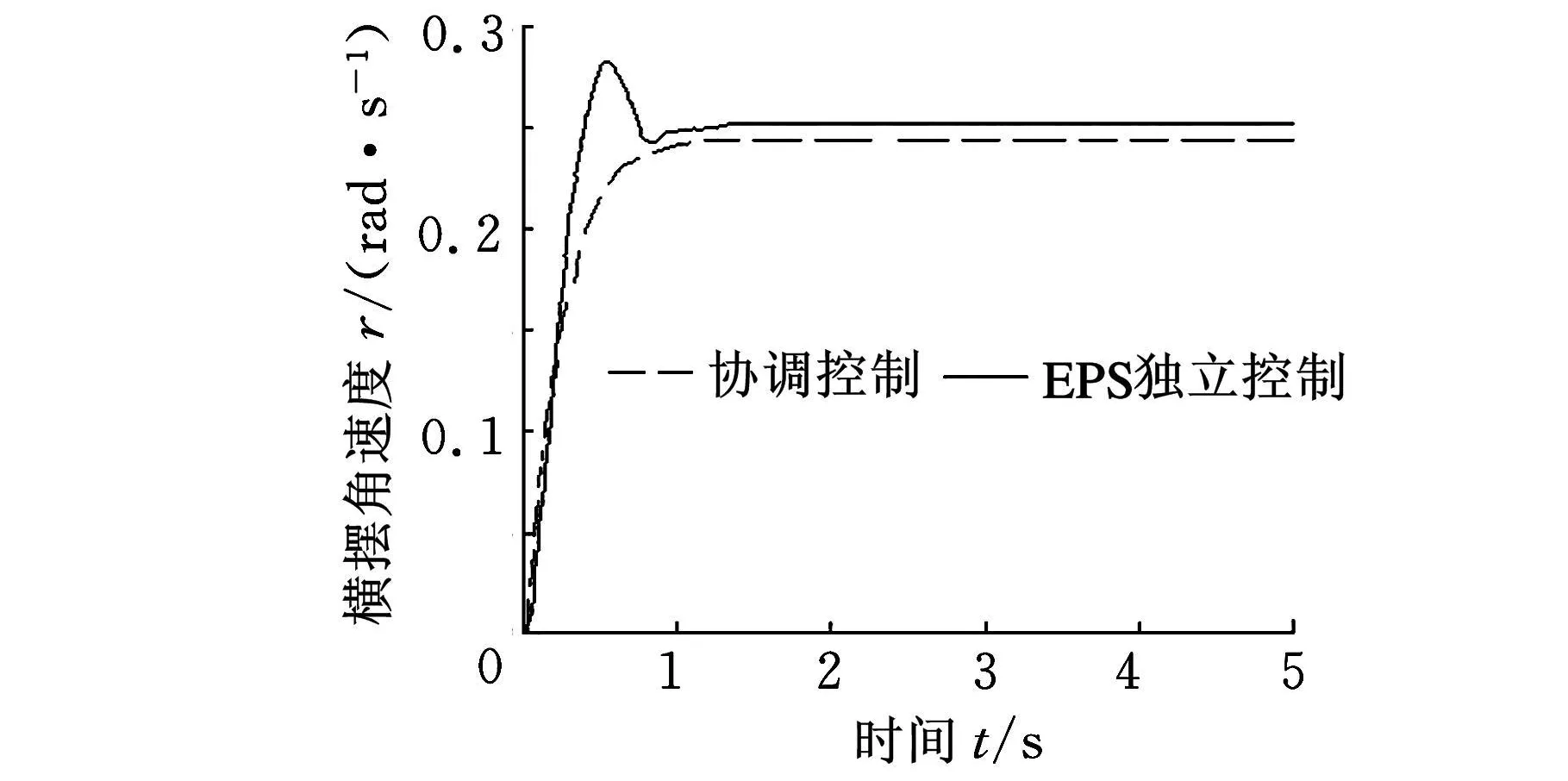
圖9 橫擺角速度
4 結束語
應用多剛體系統動力學理論建立了整車多剛體模型,在綜合考慮ASS與EPS相互影響的基礎上,對兩系統進行了協調控制研究。仿真結果表明了多剛體動力學模型和分層-監督式協調控制策略運用在汽車底盤集成控制研究中的合理性和有效性。
[1] March C,Shim T.Integrated Control of Suspension and Front Steering to Enhance Vehicle Handling[J].Proc.IMechE,2007,221(4):377-391.
[2] Cherouat H,Lakehal-Ayat M,Diop S.An Integrated Braking and Steering Control for a Cornering Vehicle[C]//Proe.AVEC04.Amhem,2004:341-346.
[3] Nikravesh P E.Computer-aided Analysis of Mechanical Systems[M].Singapore:Prentice-hall,Inc.,1988.
[4] 王陽陽,靳曉雄,孫海濤.汽車底盤集成控制動力學模型的發展[J].上海汽車,2007(4):25-27.
[5] 徐中明,余烽,張志飛,等.基于ADAMS和Simulink的車輛轉彎制動ABS聯合仿真[J].中國機械工程,2009,20(7):877-881.
[6] Yoshimura T,Emoto Y.Steering and Suspension System of a Full Car Model Using Fuzzy Reasoning Based on Single Input Rule Modules[J].International Journal of Vehicle Autonomous Systems,2003,1(3/4):237-255.
[7] Bakker E,Nyborg L,Pacejka B.Tyre Modeling for Use in Vehicle Dynamics Studies[J].SAE Paper,870421.
[8] 陳燕虹,劉宏偉,黃治國,等.基于空氣懸架客車1/2模型的模糊仿真[J].吉林大學學報,2005,35(3):25-57.
[9] 余志生.汽車理論[M].北京:清華大學出版社,2000.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
