電子海圖技術在反潛反魚雷火控設備上的應用
2010-04-24 05:23:22邱玉珍陳斌斌
指揮控制與仿真 2010年6期
邱玉珍,宋 昕,陳斌斌
(中國船舶重工集團公司江蘇自動化研究所,江蘇 連云港 222006)
電子海圖技術研究在我國始于20世紀80年代初期。中國海事局按照相應的國際標準制作完成的數百幅不同比例尺的電子海圖,在海上搜救指揮、船舶進出港引航、船舶交通管理、航標維護、航道整治等領域得到廣泛成功應用。近年來隨著海軍水面艦艇武器裝備建設的迅速發展,驅逐艦、護衛艦乃至一些快艇的導航系統、指控系統均配置了電子海圖[1]。電子海圖的裝備與雷達設備構成的系統為艦船引航、海洋環境調查、作戰系統的指揮控制起到了重要的作用[2]。
迄今為止,電子海圖應用技術在許多領域已經得到成功應用。然而,電子海圖技術在反潛反魚雷火控設備上使用在國內尚無報道。反潛反魚雷火控設備的主要任務是接收傳感器探測的水下目標信息及本艦導航信息,通過控制反潛反魚雷武器,完成對水下目標的有效打擊。為使火控設備有效地攻擊水下來襲目標,如果能夠充分了解作戰現場的海洋環境,無疑能有助于對水下目標的精確定位。定位目標準確,則打擊效果明顯。基于上述思考,在反潛反魚雷火控設備上引入電子海圖技術是必要。
1 關鍵技術實現
1.1 基于電子海圖背景的反潛反魚雷作戰態勢顯示
與其他領域應用電子海圖技術相似,在反潛反魚雷火控設備環境下完成海圖顯示、海圖作業、海圖更新等功能是電子海圖技術應用的基本任務。
1.1.1 電子海圖顯示
海圖顯示內容一般包括在給定的投影方式(包括高斯投影和墨卡托投影),按地理坐標范圍和比例尺合成和顯示海圖;海圖放大、縮小、偏心操作顯示,顯示形式見圖1。分層顯示海圖信息(隱去本艦在特定航行條件下不需要的信息)。海圖圖層包括:地名、區域界限、礙航物、航道、水深、底質、海流和磁要素、助航設備文字、助航設備圖符等。通過在菜單上設置海圖圖層選擇的子項,完成海圖圖層的選擇顯示,見圖2。
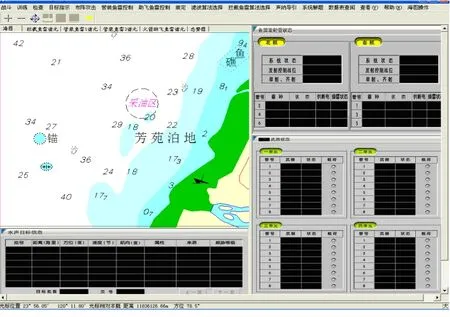
圖1 海圖顯示示例
1.1.2 電子海圖作業
海圖作業通常是通過獲取海圖上任意兩點的像素坐標,計算海圖上任意兩點間的距離、方位,也可以根據一點的經緯度坐標和另一點的位置坐標計算另一點的經緯度坐標;能夠進行84-54坐標系經緯度之間的轉換;并在海圖上繪制本艦與目標的態勢,繪制誘殺彈入水后的落點及安全規避區域。
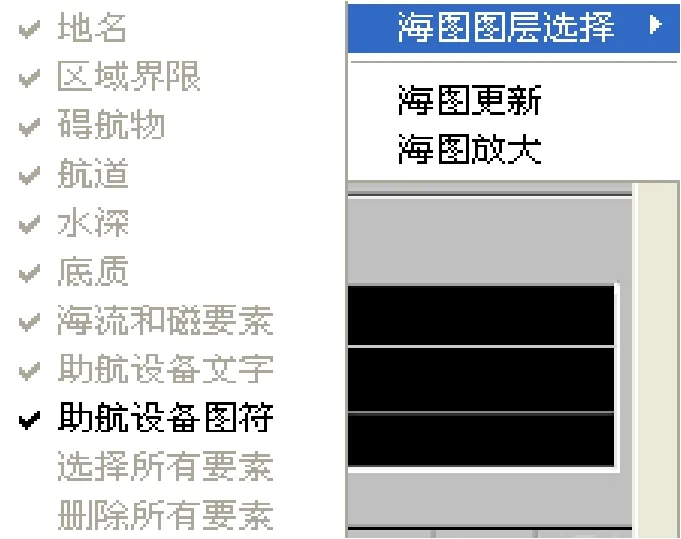
圖2 海圖圖層顯示示例
1.1.3 電子海圖更新
海洋環境會隨著時間的遷移而發生變化,海圖測繪的相關部門也會經常性的發布新版海圖。通常海圖更新的途徑包括專用網絡下載和本地介質拷貝。本文研究以本地介質拷貝作為海圖更新的手段。
1.2 輔助指揮決策
反潛反魚雷火控設備作戰時實時接收來自綜合導航系統的信息,將導航的經緯度信息進行84到54的坐標轉換。然后自動與電子海圖圖庫匹配,在海圖上顯示作戰態勢。作戰態勢示例見圖3。顯示作戰態勢時,既可以相對坐標顯示以本艦為中心的海圖作戰現場。也可以絕對坐標選擇海圖區域顯示海圖以及本艦姿態信息。還具備通過裝訂手段裝訂本艦位置信息在海圖上顯示功能。導航數據裝訂對話框見圖4。反潛作戰時,占領有利攻擊陣位是反潛作戰使用的重要手段之一,傳統的火控設備選擇攻擊陣位時,考慮的是占位時間短和發現概率高的因素,但是選擇的陣位所屬海洋環境是否對本艦的航行造成危害,則不置可否。現在,由于海圖的引入,能夠讓指揮員方便的觀察到航行前方的暗礁、禁航區、淺灘等礙航信息,提示指揮員選取攻擊陣位時注意規避。
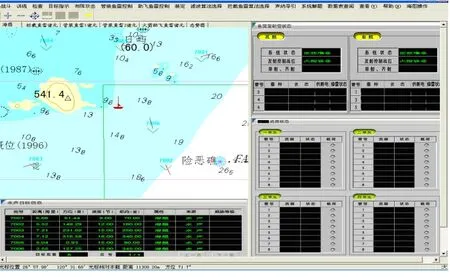
圖3 作戰態勢示例
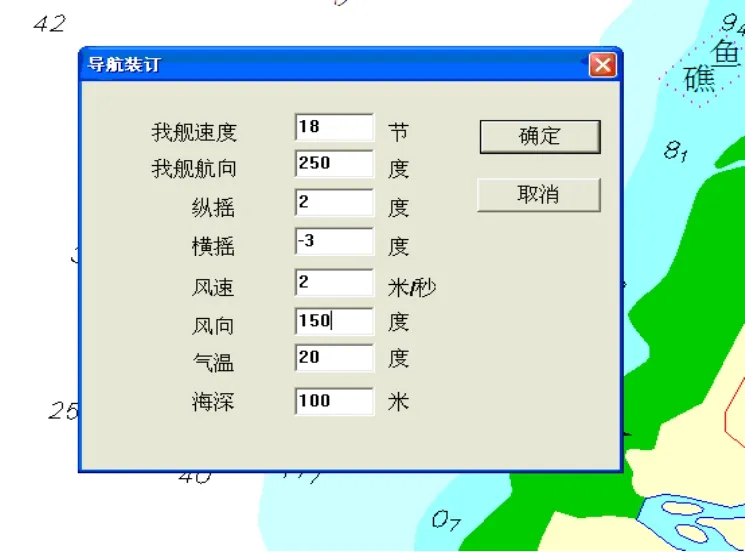
圖4 導航數據裝定
如果在航行時或平時,指揮員需要查詢當前海圖信息可以很方便的在現實海圖上點擊鼠標查詢海圖基本信息。
1.3 快速目標定位
火控設備通過作戰系統網絡接收水聲系統發送的水下目標數據、作戰指揮系統的目標指示、數據鏈信息、綜合導航系統發送的我艦運動和姿態數據。當火控設備收到聲納系統或其他傳感器發送的目標后,精確求取目標運動要素。對于距離方位確定的水下目標(潛艇、魚雷),采用傳統算法求解目標運動要素。對于傳感器只能探測到方位的魚雷目標,聲納給出方位序列,Bi與其對應采樣時刻ti,火控設備中聲納送數間隔Δt =2s;已知Vw、Cw;火控設備采用多方位、一距離、一速度的算法求解目標運動要素[3]。根據目標距離、方位,自動計算目標的經緯度坐標,并在海圖上顯示目標態勢。聲納不能測距時,僅有方位信息是很難進行目標定位的。魚雷速度可以通過設置在火控設備中的魚雷類型數據庫查詢出來襲魚雷速度(VT)。但是初始報警距離在傳統火控設備中只能通過人工判斷裝訂估計距離(D0)。一種聲納作用距離預報模型可以部分解決這個問題。這種模型的主要思想是在給定的海洋環境條件下,利用相關的聲學環境參數建立聲傳播模型,給出傳播損失曲線。結合聲納的優質因數確定聲納能夠檢測到目標的距離,從而確定可能的最小報警距離。這一方法的關鍵在于,損失曲線應該匹配于海洋環境、聲波頻率、聲納深度、目標深度和其他用于計算優質因數時涉及到的聲納參數。如果傳感器報告目標丟失,火控設備通過用鼠標在海圖上右鍵彈出動態菜單,選擇“聲納導引”子菜單,見圖5。根據坐標位置提取當前海圖上的目標批號及水深數據,計算目標與本艦的斜距與方位以及海圖水深、底質信息發送給聲納系統,幫助聲納精確定位目標。當聲納僅能提供水下來襲目標的純方位信息時,火控設備通過在海圖上用鼠標在目標方位線上連續點擊指定位置像素坐標,經過像素坐標到經緯度坐標變換,再轉換成相對本艦距離方位設定目標的距離信息,快速解算并定位目標位置。從海圖上顯示目標開始,到鼠標點擊選取坐標,直至解算目標運動要素整個過程瞬間便能完成。
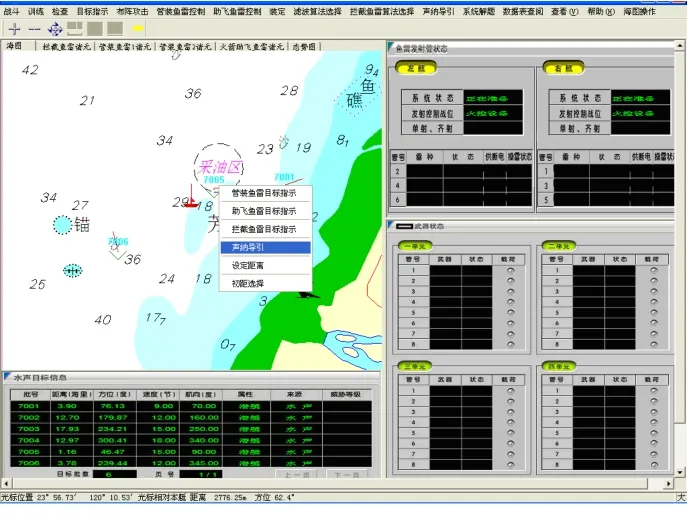
圖5 聲納導引示例
1.4 快速目標指示功能
在集中指揮方式下,由作戰系統指控下達目標指示[4],火控設備完成諸元計算。自主作戰指揮方式下,傳統的方法是設置“命令”菜單,選擇打擊目標的武器,輸入目標的批號、距離、方位、深度等信息,裝訂完成確認后,計算相應的諸元信息。無疑人工裝訂的時間相對冗長。為了提高快速作戰的能力,本研究技術既保留人工菜單裝訂目標指示的功能,同時提供通過用鼠標在海圖上右鍵彈出動態菜單,選擇希望分配的武器目標指示子菜單,見圖6。通過鼠標點擊的打擊目標位置與目標批號相關計算,并自動提取海圖上水深信息,同時考慮安全性因素,快速解算諸元,提高自備方式作戰系統反應時間。
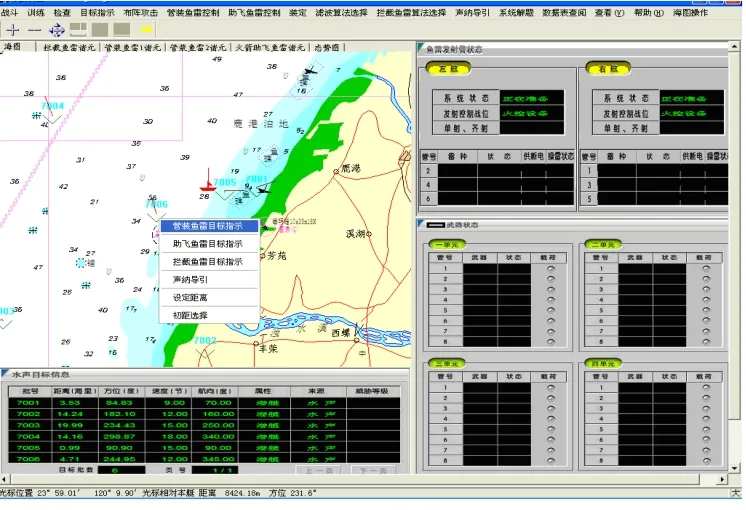
圖6 目標指示示例
1.5 電子海圖技術提升諸元計算的效能
反潛反魚雷火控設備通常具備對反潛反魚雷武器的諸元計算能力。本研究技術綜合反潛火控設備的成熟技術,引入電子海圖的環境信息,提升火控設備對武器的控制能力[5]。例如:方便的提取海區深度、海流和磁要素等信息,幫助魚雷武器完成攻擊參數計算和設定;攔截魚雷目標時,可以直接從海圖上選取坐標,設定射距,自動匹配射程,完成反魚雷武器的攔截魚雷功能。這種能力對于傳統的反潛反魚雷火控設備是不具備的。
1.6 基于電子海圖的作戰現場重現
通常反潛反魚雷火控設備都具備作戰現場重現功能,本研究技術不僅記錄作戰時傳感器和武器諸元信息,同時記錄作戰海區環境信息,建立基于海洋環境的反潛反魚雷作戰數據庫。當執行重現功能時,作戰現場以電子海圖為背景,將記錄的目標和本艦信息全部或選擇性的重現在海圖上。見圖7。
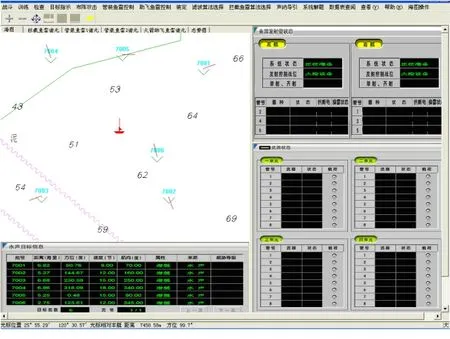
圖7 作戰現場重現示例
2 應用電子海圖反潛作戰流程
繼承反潛反魚雷火控設備的優勢,通過引入電子海圖技術,提升反潛反魚雷火控設備的目標定位和快速解算能力,以便更加有效的打擊來襲的潛艇或魚雷等水下目標。本文研究技術從作戰流程研究及軟件模塊設計開發入手,利用電子海圖的信息資源,搭建使用Visual C++6.0編程環境模擬的綜合導航系統、水聲系統、作戰指揮系統作戰現場,進行仿真計算。計算表明:在同等航路下,當導引聲納探測目標定位精度提高50%,管裝魚雷發現目標的概率可以提高20%。對于6km以上的水下目標,系統反應時間相比傳統的反潛火控設備提高了16%。驗證了提升反潛反魚雷火控設備的作戰能力。作戰流程圖見圖8。

圖8 應用電子海圖進行反潛作戰流程圖
3 結束語
在研究過程中,我們也分析了電子海圖技術的引入是否會對火控作戰流程產生負面影響,例如系統開銷加大、反映時間增加等。隨著計算機技術的迅速發展,計算機的容量已足以滿足加入海圖的需求,海圖顯示僅在作戰海區跨越時或人工干預時刷新,不會增加系統反應時間。通過演示軟件的開發,所謂的負面影響都在研究過程中充分考慮。以上研究表明,在反潛反魚雷火控設備上應用電子海圖技術,既能夠拓寬電子海圖技術的應用領域,又有助于反潛反魚雷火控設備的能力提升,這對于加強海軍建設意義重大。
[1]國家技術監督局.GB 15702-1995 電子海圖技術規范[S].北京:中國標準出版社,1995.
[2]中華人民共和國海事局.電子海圖及其應用系統國際規范和標準(S-57)[M].大連:大連海事大學出版社,1999.
[3]董志榮.目標運動分析新論[M].連云港:江蘇自動化研究所,2005.
[4]董志榮.艦艇指控系統的理論基礎[M].北京:國防工業出版社,1995.
[5]張英俊.電子海圖海圖的數學和算法基礎[M].大連: 中國海事大學出版社,2001.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
中華手工(2017年2期)2017-06-06 23:00:31
工業設計(2016年12期)2016-04-16 02:52:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
中外會展(2014年4期)2014-11-27 07:46:46
消費者報道(2014年7期)2014-07-31 11:23:57
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32