基于制導(dǎo)武器的分布式半實(shí)物仿真系統(tǒng)研究*
2010-09-02 06:23:52高寧軍張志勇陳春鵬
指揮控制與仿真 2010年6期
關(guān)鍵詞:系統(tǒng)
高寧軍,張志勇,高 超,陳春鵬
(1.解放軍91336部隊(duì),河北 秦皇島 066326;2. 解放軍91404部隊(duì),河北 秦皇島 066000)
半實(shí)物仿真(HILS)是計(jì)算機(jī)仿真時(shí)引入部分硬件實(shí)物進(jìn)行軟硬結(jié)合的仿真,是武器型號(hào)研制和試驗(yàn)鑒定過(guò)程中的一個(gè)重要環(huán)節(jié)[1]。與外場(chǎng)試驗(yàn)相比,其試驗(yàn)過(guò)程具有可重復(fù)性,在理想的仿真環(huán)境設(shè)備中,可構(gòu)造任何想定彈道過(guò)程及各類(lèi)符合戰(zhàn)術(shù)應(yīng)用的干擾狀態(tài),試驗(yàn)成本更為低廉。近二十年來(lái),美國(guó)三軍先后建成了為滿足紅外成像制導(dǎo)武器仿真需要的紅外制導(dǎo)半實(shí)物仿真系統(tǒng);為滿足雷達(dá)尋的制導(dǎo)的毫米波半實(shí)物仿真系統(tǒng)MSS-2,它是當(dāng)今世界上技術(shù)最先進(jìn)的射頻仿真系統(tǒng),可以滿足地空導(dǎo)彈毫米波精確制導(dǎo)仿真的需要,并于1995年研制成功當(dāng)今最具挑戰(zhàn)性的仿真系統(tǒng)-共孔徑的毫米波和紅外雙模制導(dǎo)半實(shí)物仿真系統(tǒng)。同時(shí)把半實(shí)物仿真生成的逼真戰(zhàn)場(chǎng)環(huán)境運(yùn)用在綜合作戰(zhàn)數(shù)字仿真中,結(jié)合先進(jìn)的 M&S(modeling and simulation)與高性能計(jì)算機(jī)組成虛擬戰(zhàn)場(chǎng),對(duì)武器系統(tǒng)進(jìn)行研制試驗(yàn)、鑒定與部隊(duì)作戰(zhàn)訓(xùn)練。當(dāng)前美軍發(fā)展半實(shí)物仿真的一個(gè)新趨勢(shì)是從單武器平臺(tái)仿真向多武器平臺(tái)仿真方向發(fā)展,為了將不同功能、不同地點(diǎn)的仿真試驗(yàn)設(shè)施進(jìn)行聯(lián)網(wǎng),組成分布式一體化的綜合仿真試驗(yàn)室 (DIS),仿真技術(shù)開(kāi)始向仿真的高層體系結(jié)構(gòu)(HLA)發(fā)展。HLA是促進(jìn)所有類(lèi)型仿真之間互操作、仿真模型組件重用的高級(jí)協(xié)議。
我國(guó)軍用仿真技術(shù)的發(fā)展已有四十年的歷史。建成了射頻、紅外仿真系統(tǒng)服務(wù)于各類(lèi)新型導(dǎo)彈,20世紀(jì)90年代我國(guó)開(kāi)始對(duì)分布交互仿真、虛擬現(xiàn)實(shí)等先進(jìn)仿真技術(shù)及其應(yīng)用進(jìn)行研究,由單個(gè)武器平臺(tái)的性能仿真發(fā)展為多武器平臺(tái)在作戰(zhàn)環(huán)境下的對(duì)抗仿真。我國(guó)國(guó)防科技大學(xué)研制的 YHF4仿真計(jì)算機(jī) ,達(dá)到了國(guó)際先進(jìn)水平,但總的技術(shù)水平,特別是應(yīng)用水平與發(fā)達(dá)國(guó)家相比還有差距。本文就建立一種適用于主動(dòng)尋的末制導(dǎo)雷達(dá)多種型號(hào)、多種信號(hào)接口形式的半實(shí)物仿真系統(tǒng)進(jìn)行了研究。概述了仿真系統(tǒng)的組成及功能,解決了數(shù)據(jù)采集傳輸?shù)汝P(guān)鍵技術(shù)問(wèn)題;并對(duì)系統(tǒng)性能進(jìn)行了測(cè)試,實(shí)現(xiàn)了基于單發(fā)導(dǎo)彈、單個(gè)目標(biāo)多種干擾及組合方式的導(dǎo)彈攻擊過(guò)程的可視化作戰(zhàn)仿真。
1 仿真暗室設(shè)備組成及功能
1.1 系統(tǒng)簡(jiǎn)介
適用于多種型號(hào)制導(dǎo)武器的半實(shí)物仿真微波暗室,由實(shí)時(shí)和以太雙網(wǎng)絡(luò)組成,將連接到網(wǎng)絡(luò)中的每臺(tái)計(jì)算機(jī)作為一個(gè)節(jié)點(diǎn),以實(shí)現(xiàn)導(dǎo)彈空中姿態(tài)、目標(biāo)環(huán)境特性模擬,全彈道數(shù)學(xué)模型解算等功能。就系統(tǒng)設(shè)計(jì)而言,導(dǎo)彈彈體、穩(wěn)定控制系統(tǒng)、舵機(jī)和捷聯(lián)慣導(dǎo)組件等導(dǎo)彈控制系統(tǒng)模塊以仿真模型方式參與仿真制導(dǎo)回路試驗(yàn)。在試驗(yàn)過(guò)程中,需要實(shí)時(shí)解算彈道仿真模型的工作狀態(tài),并管理和控制回路中其它仿真節(jié)點(diǎn)協(xié)調(diào)有序工作。考慮其通用性和可擴(kuò)展性,系統(tǒng)采用高性能通用計(jì)算機(jī),配置多樣化的數(shù)據(jù)采集手段。各仿真模塊接口與導(dǎo)彈實(shí)體相對(duì)應(yīng),使其適應(yīng)多個(gè)型號(hào)的仿真試驗(yàn)。全彈道半實(shí)物仿真微波暗室設(shè)備組成如圖1所示。
1.2 主要設(shè)備及功能
制導(dǎo)武器半實(shí)物仿真暗室主要設(shè)備包括高性能通用計(jì)算機(jī),SGI圖形工作站,仿真接口控制柜等相關(guān)仿真設(shè)備。其中,實(shí)時(shí)網(wǎng)作用是為仿真試驗(yàn)提供各設(shè)備間的高速通信鏈路,以滿足節(jié)點(diǎn)之間的實(shí)時(shí)數(shù)據(jù)交互要求。而全彈道數(shù)學(xué)仿真模型的準(zhǔn)確性,戰(zhàn)場(chǎng)態(tài)勢(shì)設(shè)置的合理性,則需要在應(yīng)用前加以驗(yàn)證。以太網(wǎng)就是出于這種目的而設(shè)立,同時(shí)也被用于試驗(yàn)準(zhǔn)備階段的軟件開(kāi)發(fā),實(shí)現(xiàn)各節(jié)點(diǎn)控制計(jì)算機(jī)之間的信息交互和資源共享。出于對(duì)被試品實(shí)時(shí)性的考慮,半實(shí)物仿真實(shí)時(shí)網(wǎng)絡(luò)采用基于 VMIC-5565實(shí)時(shí)網(wǎng)卡的星型拓?fù)浣Y(jié)構(gòu),通過(guò)冗余光纖Hub(VMIACC-5595)與各仿真設(shè)備相連。與環(huán)型結(jié)構(gòu)相比,星型拓?fù)浣Y(jié)構(gòu)消除了單點(diǎn)失效、實(shí)現(xiàn)了故障隔離,通過(guò)對(duì)節(jié)點(diǎn)優(yōu)先級(jí)的設(shè)置使其具有更小的延時(shí)[2]。
1)仿真主控計(jì)算機(jī):是整個(gè)系統(tǒng)的管理和控制核心,具有仿真資源配置、仿真試驗(yàn)前的態(tài)勢(shì)下發(fā)、全彈道仿真模型校驗(yàn)、情報(bào)參數(shù)裝訂,仿真進(jìn)程控制功能,同時(shí)完成實(shí)時(shí)網(wǎng)閉環(huán)前自檢、系統(tǒng)授時(shí),對(duì)仿真節(jié)點(diǎn)的工作狀態(tài)進(jìn)行監(jiān)控;
2)三軸飛行轉(zhuǎn)臺(tái):作用是把彈道解算計(jì)算機(jī)解算出的導(dǎo)彈姿態(tài)運(yùn)動(dòng)量,轉(zhuǎn)換為三個(gè)方向的角位置和角速度,從而形成逼真的模擬飛行器姿態(tài)變化;
3)目標(biāo)環(huán)境生成系統(tǒng):由射頻信號(hào)源分系統(tǒng),陣列及饋電分系統(tǒng)組成。主要功能是在微波暗室內(nèi),模擬導(dǎo)彈攻擊目標(biāo)過(guò)程中導(dǎo)彈末制導(dǎo)雷達(dá)所遭遇到的電磁信號(hào)環(huán)境,生成有源和無(wú)源干擾信號(hào)、雷達(dá)目標(biāo)回波模擬信號(hào)、目標(biāo)視線角位置及運(yùn)動(dòng)軌跡;
4)彈道解算計(jì)算機(jī):實(shí)時(shí)解算制導(dǎo)武器運(yùn)動(dòng)學(xué)、動(dòng)力學(xué)和控制系統(tǒng)模型,生成彈目相對(duì)距離、彈體姿態(tài)以及導(dǎo)彈位置等其它仿真設(shè)備的控制指令,協(xié)調(diào)有序的完成全系統(tǒng)半實(shí)物仿真。它既能用數(shù)學(xué)模型對(duì)制導(dǎo)武器系統(tǒng)進(jìn)行數(shù)字仿真,又能和接入仿真回路的實(shí)物一起構(gòu)成半實(shí)物仿真系統(tǒng);
5)視景仿真計(jì)算機(jī):在接近實(shí)戰(zhàn)的環(huán)境下,以導(dǎo)彈姿態(tài)、位置及彈目相對(duì)位置等信息為參數(shù),將導(dǎo)彈攻擊目標(biāo)的過(guò)程以三維動(dòng)畫(huà)方式直觀顯示,形象、直觀的形式實(shí)時(shí)顯示飛行器半實(shí)物仿真的全仿真過(guò)程。
6)數(shù)據(jù)采集傳輸系統(tǒng):主要完成遠(yuǎn)端被試導(dǎo)引頭的數(shù)據(jù)采集和測(cè)試操作,同時(shí)將采集到的制導(dǎo)信息,通過(guò)反射內(nèi)存?zhèn)魉徒o彈道解算計(jì)算機(jī);并回傳控制指令實(shí)時(shí)控制導(dǎo)引頭工作狀態(tài)。
7)數(shù)據(jù)庫(kù)服務(wù)器:對(duì)系統(tǒng)所需要的情報(bào)資源和仿真資源信息等進(jìn)行管理,并在仿真試驗(yàn)過(guò)程中對(duì)數(shù)據(jù)進(jìn)行實(shí)時(shí)記錄和存儲(chǔ);
1.3 仿真軟件及功能
操作系統(tǒng):Windows2000 + 實(shí)時(shí)軟件包 ;系統(tǒng)總體開(kāi)發(fā)平臺(tái):Visual C++ 6.0;仿真建模軟件:YHSIM;三維視景軟件:Multigen Creator 3.0和專業(yè)可視化仿真軟件包完成Vega Prime 2.0;數(shù)據(jù)庫(kù)開(kāi)發(fā)工具:SQL Sever 2005。
由于 HILS的各仿真節(jié)點(diǎn)運(yùn)行不同的仿真軟件用以實(shí)現(xiàn)不同的功能,為確保各節(jié)點(diǎn)之間數(shù)據(jù)通訊和仿真同步,仿真軟件總體上汲取windows操作系統(tǒng)消息、事件驅(qū)動(dòng)的程序設(shè)計(jì)方法,采用客戶/服務(wù)器運(yùn)行機(jī)制,服務(wù)器程序通過(guò)VMIC網(wǎng)絡(luò)向各仿真節(jié)點(diǎn)發(fā)送仿真驅(qū)動(dòng)消息,并對(duì)各節(jié)點(diǎn)狀態(tài)消息查詢,驅(qū)動(dòng)各客戶機(jī)節(jié)點(diǎn)控制軟件運(yùn)行。仿真軟件從頂層設(shè)計(jì)角度出發(fā),將各節(jié)點(diǎn)的仿真軟件分為三大類(lèi):主控機(jī)軟件、同步機(jī)軟件和非同步機(jī)軟件。在導(dǎo)彈閉環(huán)仿真試驗(yàn)中,彈道解算計(jì)算機(jī)、目標(biāo)環(huán)境生成系統(tǒng)、三軸飛行轉(zhuǎn)臺(tái)控制系統(tǒng)、數(shù)據(jù)傳輸系統(tǒng)執(zhí)行同步機(jī)軟件運(yùn)行機(jī)制[3]。
基于反射內(nèi)存API動(dòng)態(tài)鏈接庫(kù)技術(shù)是獨(dú)立于應(yīng)用程序的分布式仿真系統(tǒng)應(yīng)用程序接口。它是基于VMIC-5565內(nèi)存通信協(xié)議的即時(shí)通信服務(wù),與各仿真節(jié)點(diǎn)程序并行開(kāi)發(fā),自行調(diào)試,各節(jié)點(diǎn)應(yīng)用程序以API的動(dòng)態(tài)鏈接庫(kù)形式調(diào)用,程序之間無(wú)須進(jìn)行通信調(diào)試。數(shù)據(jù)轉(zhuǎn)發(fā)依據(jù)查詢狀態(tài)位或發(fā)硬中斷方式實(shí)現(xiàn),各節(jié)點(diǎn)仿真主程序不參與各類(lèi)信息的網(wǎng)絡(luò)間傳輸。必須注意的是,對(duì)于每個(gè)節(jié)點(diǎn)上的反射內(nèi)存,其地址是本地主機(jī)內(nèi)存的一部分;通過(guò)內(nèi)存映射機(jī)制,用戶對(duì)本地節(jié)點(diǎn)內(nèi)存的讀寫(xiě)相當(dāng)于對(duì)網(wǎng)間各節(jié)點(diǎn)相同地址內(nèi)存進(jìn)行讀寫(xiě),從而實(shí)現(xiàn)了分布節(jié)點(diǎn)間的數(shù)據(jù)通信[4]。
因此,在控制關(guān)系明確的基礎(chǔ)上,彈道解算計(jì)算機(jī)與各節(jié)點(diǎn)之間的通信協(xié)議,包括傳輸參數(shù)、數(shù)據(jù)格式、VMIC內(nèi)存地址分配等;都應(yīng)采用相同的數(shù)據(jù)類(lèi)型和數(shù)據(jù)結(jié)構(gòu),否則將引發(fā)內(nèi)存地址沖突,以致仿真試驗(yàn)失敗。制導(dǎo)武器半實(shí)物仿真微波暗室通過(guò)應(yīng)用“YH-Astar”仿真工作站以及運(yùn)行其上的 YHSIM 實(shí)時(shí)仿真軟件,采用實(shí)時(shí)的 Runge-Kutta積分算法和基于VMIC-5565反射內(nèi)存的實(shí)時(shí)網(wǎng)絡(luò),全面確保了半實(shí)物仿真的實(shí)時(shí)性[5]。
2 半實(shí)物仿真系統(tǒng)關(guān)鍵技術(shù)
2.1 實(shí)時(shí)數(shù)據(jù)采集傳輸系統(tǒng)
2.1.1 系統(tǒng)總體設(shè)計(jì)及硬件配置
數(shù)據(jù)采集和傳輸系統(tǒng)是為減輕彈道解算計(jì)算機(jī)解算負(fù)載以保證實(shí)時(shí)性的前提下設(shè)計(jì)的。其主要功能是在末制導(dǎo)雷達(dá)閉環(huán)仿真試驗(yàn)?zāi)J街校瑢?shí)時(shí)采集末制導(dǎo)雷達(dá)輸出的相關(guān)制導(dǎo)與指令信息,并通過(guò)VMIC實(shí)時(shí)網(wǎng)實(shí)時(shí)傳送到彈道解算計(jì)算機(jī)參與全彈道解算;同時(shí),向被試末制導(dǎo)雷達(dá)發(fā)送控制指令,實(shí)時(shí)控制末制導(dǎo)雷達(dá)的工作狀態(tài)。其組成如圖2所示。
為適應(yīng)數(shù)字雷達(dá)導(dǎo)引頭的仿真試驗(yàn)的需求,采集系統(tǒng)在原有的基礎(chǔ)上增加了串行數(shù)字量采集通道,該通道接口形式包括有:RS232、RS422、RS485;其與TTL電平相互轉(zhuǎn)換由信號(hào)調(diào)理模塊實(shí)現(xiàn),離散量的采集、量化、編碼采用的是包括基于PCI總線的時(shí)統(tǒng)部件I/O控制卡。
串行數(shù)字量采集通道硬件部分主要由上、下位機(jī)構(gòu)成,上位機(jī)為高性能工控機(jī)。以DMA查詢的方式與下位機(jī)進(jìn)行通信,接收下位機(jī)的數(shù)據(jù),并對(duì)數(shù)據(jù)進(jìn)行分析和處理,實(shí)時(shí)地顯示控制變量的狀態(tài)。同時(shí)根據(jù)彈道解算控制信息,向下位機(jī)發(fā)送指令。由單片機(jī)和A/D芯片組成的下位機(jī)將傳感器采集到的離散信號(hào)進(jìn)行DCB編碼,同時(shí)根據(jù)上位機(jī)發(fā)出的控制指令控制導(dǎo)引頭執(zhí)行相應(yīng)的操作;上位機(jī)通過(guò)數(shù)字I/O控制板卡可擴(kuò)展出m≤ 8個(gè)串口。采用VC++6.0環(huán)境下調(diào)用Windows API函數(shù)編程實(shí)現(xiàn)串口通信[6]。系統(tǒng)通過(guò)被稱為設(shè)備控制塊DCB 的數(shù)據(jù)結(jié)構(gòu)對(duì)串行口和串口通信驅(qū)動(dòng)程序進(jìn)行配置串口設(shè)備屬性的配置由以下 API 函數(shù)完成:Setup2Comm() 設(shè)置串行通信端口的輸入和輸出緩沖區(qū)的大小;通過(guò)設(shè)備控制塊 DCB 修改和設(shè)置串口工作狀態(tài)的參數(shù)。
2.1.2 創(chuàng)建讀寫(xiě)線程,實(shí)現(xiàn)串行通信
如圖3所示,首先打開(kāi)并配置完串口后開(kāi)啟讀、寫(xiě)線程。主線程主要負(fù)責(zé)將所有串口接收到的數(shù)據(jù)進(jìn)行處理顯示以及各個(gè)子線程的調(diào)度和管理,讀線程負(fù)責(zé)讀取m個(gè)串口的數(shù)據(jù),寫(xiě)線程負(fù)責(zé)向需要控制的串口寫(xiě)入數(shù)據(jù)。在實(shí)際應(yīng)用中向串口寫(xiě)人數(shù)據(jù)的操作只是有限的控制指令,所以寫(xiě)線程在創(chuàng)建時(shí)即被掛起,當(dāng)需要向串口發(fā)送數(shù)據(jù)時(shí)激活寫(xiě)線程;寫(xiě)操作完成后,即被掛起,以減少系統(tǒng)開(kāi)銷(xiāo),提高程序的執(zhí)行效率[7]。以下是用Windows API函數(shù)編寫(xiě)的關(guān)鍵部分的代碼。
1)添加全局變量:
2)創(chuàng)建讀寫(xiě)線程:
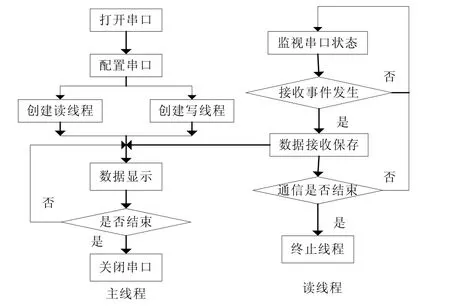
圖3 多線程實(shí)現(xiàn)多串口通信流程
3)在讀寫(xiě)線程函數(shù)中添加相應(yīng)的處理信息:
首先在讀線程中調(diào)用CreateEvent函數(shù)創(chuàng)建一個(gè)事件,其次調(diào)用WaitCommEvent函數(shù)等待該窗口事件,當(dāng)檢測(cè)到EV_RXCHAR事件發(fā)生時(shí),再調(diào)用ReadFile函數(shù)將數(shù)據(jù)讀入緩沖區(qū)內(nèi),并進(jìn)行顯示處理。因?yàn)閷?xiě)線程創(chuàng)建的時(shí)候即被掛起,故要重新調(diào)用寫(xiě)線程函數(shù)時(shí),必須要先調(diào)用ResumeThread函數(shù)恢復(fù)線程,然后調(diào)用WfiteFile函數(shù)向串口寫(xiě)入數(shù)據(jù)。當(dāng)數(shù)據(jù)發(fā)送成功時(shí),調(diào)用SuspendThread函數(shù)掛起寫(xiě)線程。數(shù)據(jù)采集軟件控制界面如圖4所示。
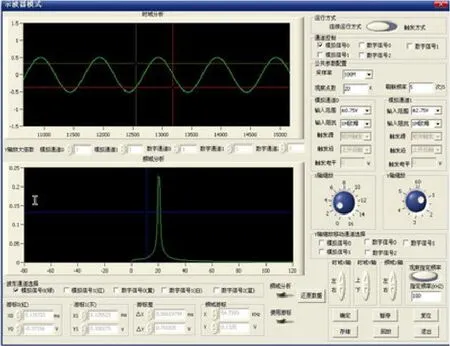
圖4 數(shù)據(jù)采集軟件示意圖
開(kāi)啟讀寫(xiě)兩個(gè)線程進(jìn)行多串口通信,數(shù)據(jù)接收、數(shù)據(jù)顯示、發(fā)送數(shù)據(jù)三者同時(shí)執(zhí)行,減少了系統(tǒng)的等待時(shí)間,使系統(tǒng)具有更好的實(shí)時(shí)性。在優(yōu)先級(jí)的安排上,Windows系統(tǒng)Event(事件) 同步化機(jī)制,把數(shù)據(jù)采集及向反射內(nèi)存發(fā)送代碼部分放入高優(yōu)先級(jí)循環(huán),而把數(shù)據(jù)存儲(chǔ)、上位機(jī)上運(yùn)行控制部分放入較低循環(huán)內(nèi)優(yōu)化了軟件的實(shí)時(shí)性能,實(shí)現(xiàn)線程間同步。因與實(shí)時(shí)網(wǎng)通信,數(shù)據(jù)采集軟件通過(guò)調(diào)用和封裝與實(shí)時(shí)網(wǎng)通信API函數(shù)即可。此外,連接時(shí)還必須將實(shí)時(shí)網(wǎng)的庫(kù)rfmdll stdc.lib連接進(jìn)去。
2.2 數(shù)據(jù)傳輸性能測(cè)試
網(wǎng)絡(luò)實(shí)時(shí)性能指標(biāo)測(cè)試包括:
1)反射內(nèi)存節(jié)點(diǎn)之間的讀寫(xiě)和傳輸時(shí)延;
2)采集節(jié)點(diǎn)反射內(nèi)存與導(dǎo)引頭I/O接口間讀寫(xiě)傳輸時(shí)延;
測(cè)試數(shù)據(jù)包由測(cè)試包和標(biāo)志位兩部分組成。取要測(cè)試的兩節(jié)點(diǎn)為A和B,用以下兩種方法對(duì)A、B兩個(gè)節(jié)點(diǎn)之間的讀寫(xiě)傳輸時(shí)間進(jìn)行測(cè)試:首先,置計(jì)時(shí)標(biāo)志“TA”,由節(jié)點(diǎn)A發(fā)送測(cè)試包,發(fā)送完后置讀寫(xiě)標(biāo)志位為“1”,節(jié)點(diǎn)B對(duì)讀寫(xiě)標(biāo)志位查詢?yōu)椤?”時(shí),開(kāi)始讀取測(cè)試包,讀完后置讀寫(xiě)標(biāo)志位為“0”。當(dāng)節(jié)點(diǎn)“A”查詢到讀寫(xiě)標(biāo)志位為“0”時(shí),發(fā)送下一組數(shù)據(jù)包。完成讀寫(xiě)操作N次后,置計(jì)時(shí)標(biāo)志“TB”。則單次數(shù)據(jù)發(fā)送的平均時(shí)間為(TB-TA)/N。
測(cè)試結(jié)果表明,從數(shù)據(jù)寫(xiě)入RAM到傳到另一個(gè)結(jié)點(diǎn)的反射內(nèi)存卡上,只有不到400納秒的時(shí)延。滿足飛行仿真對(duì)網(wǎng)絡(luò)數(shù)據(jù)通信的高速、實(shí)時(shí)的要求。
彈道解算滯后數(shù)據(jù)采集傳輸只有1毫秒時(shí)間,由于彈道解算與數(shù)據(jù)采集同時(shí)進(jìn)行。因此,數(shù)據(jù)采集計(jì)算機(jī)在制導(dǎo)回路的介入不會(huì)影響到制導(dǎo)回路系統(tǒng)實(shí)時(shí)性與同步性。
2.3 系統(tǒng)誤差分析及修正
仿真試驗(yàn)結(jié)果的可信度,取決于各種誤差特性,如果各類(lèi)誤差的總和超出了系統(tǒng)的要求,仿真試驗(yàn)就失去了意義。HILS微波暗室誤差主要包括:計(jì)算機(jī)系統(tǒng)誤差、目標(biāo)系統(tǒng)控制誤差、近場(chǎng)效應(yīng)誤差、回轉(zhuǎn)中心不重合誤差、轉(zhuǎn)臺(tái)控制誤差、暗室誤差。
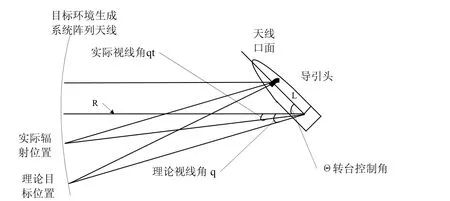
圖5 回轉(zhuǎn)中誤差示意圖
在系統(tǒng)仿真試驗(yàn)結(jié)果分析中,一些誤差可以忽略不計(jì);其余能夠補(bǔ)償或修正,由于篇幅關(guān)系,以下回轉(zhuǎn)中心不重合誤差修正方法加以詳細(xì)說(shuō)明。
如圖5所示,從被試末制導(dǎo)雷達(dá)天線口面測(cè)量目標(biāo)視線角時(shí)(Radar-Targe LOS angular),產(chǎn)生了視線角的測(cè)量誤差,該項(xiàng)誤差直接引入被試末制導(dǎo)雷達(dá)的制導(dǎo)回路,會(huì)導(dǎo)致脫靶量的變化,對(duì)于該項(xiàng)誤差必須進(jìn)行修正。由于該項(xiàng)誤差是幾何誤差,計(jì)算方法如下(以一維為例):
假定目標(biāo)系統(tǒng)到轉(zhuǎn)臺(tái)回轉(zhuǎn)中心的距離為R,轉(zhuǎn)臺(tái)回轉(zhuǎn)中心到末制導(dǎo)雷達(dá)天線口面的距離為L(zhǎng),理論視線角為q,轉(zhuǎn)臺(tái)控制角為θ,經(jīng)修正后的實(shí)際視線角位置為qt,從圖5中可直接推導(dǎo)出:

即在回轉(zhuǎn)中心不重合的情形下,需要經(jīng)過(guò)回轉(zhuǎn)中心修正,重新計(jì)算視線角。此誤差以視線角參數(shù)由彈道解算完成。
3 視景驅(qū)動(dòng)
視景仿真軟件是基于Vega Prime平臺(tái)開(kāi)發(fā)了戰(zhàn)場(chǎng)環(huán)境、作戰(zhàn)實(shí)體及電磁波抽象表現(xiàn)視景模型,實(shí)現(xiàn)了仿真過(guò)程可視化。本系統(tǒng)采用Multigen Creator構(gòu)建模型數(shù)據(jù)庫(kù),采用的控制軟件是使用Visual C++7.1進(jìn)行開(kāi)發(fā)。在MFC中建立基于API應(yīng)用程序,首先要解決兩者之間的通信問(wèn)題,采用多線程技術(shù)是目前最有效的辦法。MFC支持多線程應(yīng)用程序開(kāi)發(fā),并把線程分為兩類(lèi):用戶界面線程(User Interface Thread)和工作線程(Worker Thread)。在建立MFC框架時(shí),系統(tǒng)自動(dòng)為開(kāi)啟了用戶界面線程,用以響應(yīng)用戶事件。此時(shí)可以將Vega Prime的主線程定義為MFC的工作線程。利用AfxBeginThread()函數(shù)開(kāi)啟相應(yīng)的工作線程后,即可以添Vega Prime程序和消息循環(huán)。需要注意的是:在結(jié)束應(yīng)用程序之前必須要先結(jié)束該工作線程,否則會(huì)引起程序異常[8]。 Vega Prime工作線程的函數(shù)主要完成仿真環(huán)境的實(shí)時(shí)控制。
4 應(yīng)用實(shí)例
設(shè)置態(tài)勢(shì)并校驗(yàn)全彈道模型及檢驗(yàn)物理效應(yīng)設(shè)備的邊界合法性。態(tài)勢(shì)文件包括:當(dāng)前環(huán)境溫度、風(fēng)干擾、海情等自然環(huán)境,以及導(dǎo)彈發(fā)射位置與角度、主目標(biāo)的初始位置和運(yùn)動(dòng)規(guī)律、干擾參數(shù)(發(fā)射時(shí)間、樣式、強(qiáng)度、頻率等)。
整個(gè)視景仿真由彈道仿真工作站、目標(biāo)環(huán)境生成系統(tǒng)和SGI圖形工作站完成。試驗(yàn)開(kāi)始后,紅、藍(lán)雙方各作戰(zhàn)對(duì)象組件按預(yù)期實(shí)時(shí)運(yùn)行。在大地坐標(biāo)系下,紅方岸防部隊(duì)接預(yù)警通報(bào),組織警戒搜索雷達(dá)進(jìn)入對(duì)海防御部署。藍(lán)方艦艇按預(yù)定航路行進(jìn)如圖 6,當(dāng)藍(lán)方艦載電子戰(zhàn)系統(tǒng)探測(cè)到紅方雷達(dá)信號(hào)時(shí),開(kāi)始對(duì)紅方實(shí)施有源干擾。紅方在預(yù)警和地面指控系統(tǒng)的引導(dǎo)下對(duì)藍(lán)方發(fā)射反艦導(dǎo)彈予以打擊,藍(lán)方對(duì)來(lái)襲導(dǎo)彈實(shí)施沖淡式箔條干擾。紅方反艦導(dǎo)彈進(jìn)入自控段末端,末制導(dǎo)雷達(dá)開(kāi)機(jī),藍(lán)方組織實(shí)施質(zhì)心式箔條干擾;同時(shí)進(jìn)行規(guī)避機(jī)動(dòng),紅方反艦導(dǎo)彈與藍(lán)方艦船交匯后,仿真過(guò)程結(jié)束。
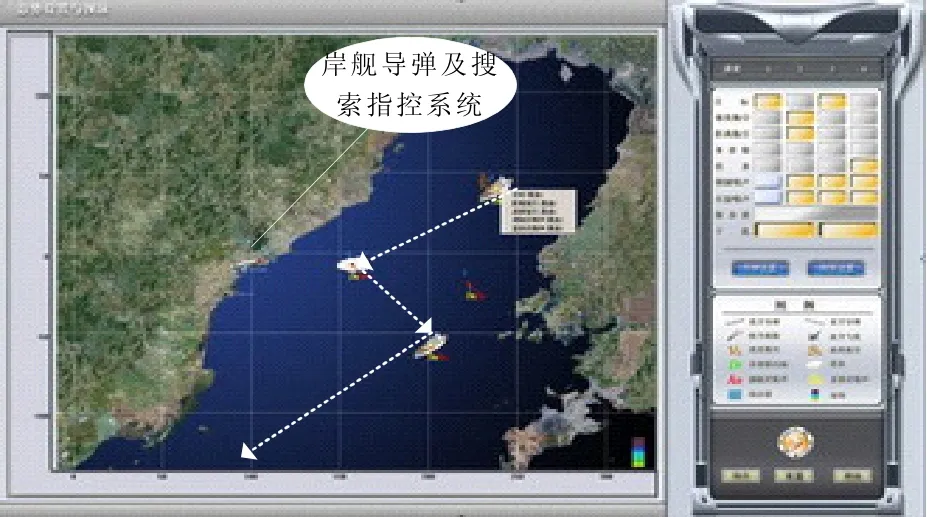
圖6目標(biāo)環(huán)境模擬器態(tài)勢(shì)顯
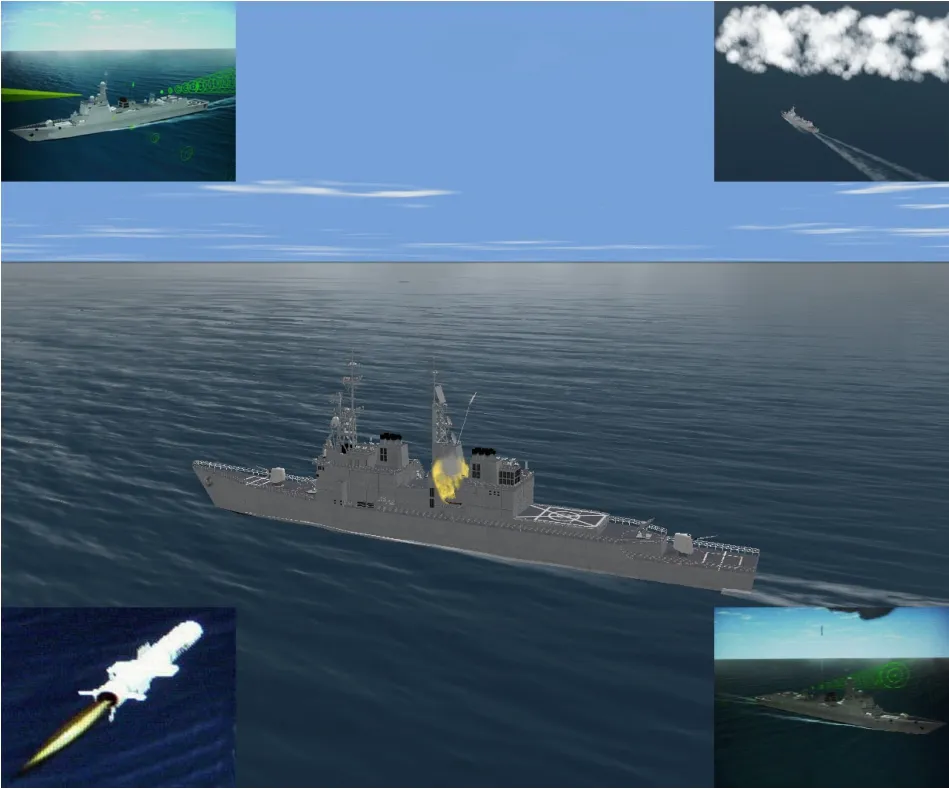
圖7 某時(shí)刻導(dǎo)彈攻擊過(guò)程場(chǎng)景截屏
5 結(jié)束語(yǔ)
本文針對(duì)基于制導(dǎo)武器的半實(shí)物仿真系統(tǒng)進(jìn)行了研究。概述了仿真系統(tǒng)的框架組成,敘述了各主要仿真節(jié)點(diǎn)功能,給出了數(shù)據(jù)采集控制流程;詳細(xì)介紹了實(shí)時(shí)數(shù)據(jù)采集和傳輸、視景驅(qū)動(dòng)的實(shí)現(xiàn)方法等關(guān)鍵技術(shù)問(wèn)題。
展望未來(lái),靶場(chǎng)還應(yīng)為滿足紅外成像制導(dǎo)武器的需要,加速發(fā)展紅外成像制導(dǎo)半實(shí)物仿真系統(tǒng)、滿足雷達(dá)尋的制導(dǎo)由微波向毫米波發(fā)展的需要,建設(shè)大型的毫米波仿真系統(tǒng),另外也要在多模(微波/毫米波、微波/紅外)制導(dǎo)體制下仿真系統(tǒng)的開(kāi)發(fā)上做深入的研究和開(kāi)發(fā)工作。為適應(yīng)精確制導(dǎo)武器抗干擾的需要,大力發(fā)展仿真系統(tǒng)中干擾環(huán)境的建設(shè)。
[1]常曉飛,符文星,閆杰. 基于RT-LAB的某型導(dǎo)彈半實(shí)物仿真系設(shè)計(jì)[J].系統(tǒng)仿真學(xué)報(bào),2009,21(18):5720-5723.
[2]PCI-5565 REFLECTIVE MEMORY BOARD PRODUCT MANUAL[R].United States:VME Micro systems International Corporation,2005.
[3]符文星,孫力,于云峰,等.導(dǎo)彈武器系統(tǒng)分布式半實(shí)物仿真系統(tǒng)研究[J]. 系統(tǒng)仿真學(xué)報(bào),2009,21(19):6037-6076.
[4]蔣志文,鄢來(lái)斌,姚益平. 銀河仿真工作站實(shí)時(shí)通信技術(shù)的研究與實(shí)現(xiàn)[J]. 國(guó)防科技大學(xué)學(xué)報(bào),2002,24(5):20-23
[5]鄢來(lái)斌, 姚益平, 蔣志文. 分布式半實(shí)物仿真中的實(shí)時(shí)網(wǎng)通信同步技術(shù)研究[c]// 中國(guó)系統(tǒng)仿真學(xué)會(huì)學(xué)術(shù)會(huì)議論文集,2002,24(5):20-23.
[6]郝文化. Windows多線程編程技術(shù)與實(shí)例[M].北京:中國(guó)水利水電出版社,2005.
[7]DENVER A.Serial communications in Win32,Miemeoft Windows developer support[Z].Microsoft,1995.
[8]孫遜,杜小菁. 高動(dòng)態(tài)飛行器姿態(tài)解算及三維視景仿真研究[J].系統(tǒng)仿真學(xué)報(bào),2007,19(14):3266-3269.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(xiāo)(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32