基于AVR單片機(jī)的挖掘機(jī)器人控制系統(tǒng)設(shè)計(jì)
2010-04-11 08:07:48潘彩霞
制造業(yè)自動(dòng)化 2010年14期
關(guān)鍵詞:單片機(jī)設(shè)計(jì)
沈 旭,潘彩霞
SHEN Xu, PAN Cai-xia
(南京交通職業(yè)技術(shù)學(xué)院,南京 211188)
基于AVR單片機(jī)的挖掘機(jī)器人控制系統(tǒng)設(shè)計(jì)
Design of the control system for digging robot based on AVR
沈 旭,潘彩霞
SHEN Xu, PAN Cai-xia
(南京交通職業(yè)技術(shù)學(xué)院,南京 211188)
利用AVR單片機(jī)設(shè)計(jì)了全數(shù)字化挖掘機(jī)器人控制系統(tǒng),給出了挖掘機(jī)器人控制系統(tǒng)總體方案,AVR單片機(jī)控制系統(tǒng)以ATmega128為核心,通過紅外傳感器進(jìn)行障礙物檢測,采用PWM的差動(dòng)方式控制直流電機(jī),實(shí)現(xiàn)挖掘機(jī)器人直行、后退、左轉(zhuǎn)、右轉(zhuǎn)、自主避障、自主挖掘等功能。整個(gè)系統(tǒng)充分利用了AVR單片機(jī)的內(nèi)部資源,最大程度地簡化了硬件電路,使系統(tǒng)具有較高的性價(jià)比和可靠性。
單片機(jī)(AVR);挖掘機(jī)器人;控制系統(tǒng)
0 引言
挖掘機(jī)的出現(xiàn)使人類從繁重的體力勞動(dòng)中解脫出來,然而傳統(tǒng)的挖掘機(jī)操作復(fù)雜,對操作者的技能要求很高。人們一直謀求更省力、更高效率和更能實(shí)現(xiàn)精確軌跡的挖掘作業(yè)模式。隨著微電子技術(shù)的進(jìn)一步發(fā)展,集成電路的集成度和性能提高、價(jià)格下降,以微處理器為基礎(chǔ),實(shí)現(xiàn)挖掘機(jī)的機(jī)電一體化、機(jī)器人化、智能化進(jìn)程,已經(jīng)成為工程項(xiàng)目施工管理的一個(gè)重要研究課題與發(fā)展方向。本文以挖掘機(jī)器人為例,設(shè)計(jì)一種基于AVR單片機(jī)的挖掘機(jī)器人控制系統(tǒng)。
1 總體方案設(shè)計(jì)
挖掘機(jī)器人由挖掘機(jī)器人本體機(jī)械系統(tǒng)、紅外傳感器組成的傳感器系統(tǒng)、直流電機(jī)驅(qū)動(dòng)系統(tǒng)、以AVR單片機(jī)為核心的控制系統(tǒng)等四部分組成,其基本結(jié)構(gòu)如圖1所示。

圖1 挖掘機(jī)器人的基本結(jié)構(gòu)
挖掘機(jī)器人的工作過程主要如下:傳感系統(tǒng)采用紅外線距離傳感器,來實(shí)現(xiàn)對周圍環(huán)境中障礙物的實(shí)時(shí)檢測,測量信號送入以AVR單片機(jī)為核心的控制系統(tǒng),單片機(jī)根據(jù)測量情況在內(nèi)部進(jìn)行決策,輸出控制信號通過驅(qū)動(dòng)系統(tǒng)控制伺服電動(dòng)機(jī),帶動(dòng)挖掘機(jī)器人各個(gè)關(guān)節(jié)運(yùn)動(dòng)實(shí)現(xiàn)直行、后退、左轉(zhuǎn)、右轉(zhuǎn)、自主挖掘等功能。
2 控制系統(tǒng)的硬件設(shè)計(jì)
本設(shè)計(jì)以ATMEL公司的ATmega128微控制器為核心,通過紅外線距離傳感器采集外部數(shù)據(jù),通過功率驅(qū)動(dòng)帶動(dòng)電機(jī)實(shí)現(xiàn)自動(dòng)控制。傳感器通過后向反饋通道將信息不斷傳遞給微控制器,微控制器通過前向控制通道實(shí)時(shí)調(diào)整小車的行車狀態(tài),從而構(gòu)成閉環(huán)控制系統(tǒng),如圖2所示。

圖2 挖掘機(jī)器人控制系統(tǒng)硬件設(shè)計(jì)框圖
根據(jù)控制系統(tǒng)硬件框圖,結(jié)合自身的特點(diǎn),硬件平臺的設(shè)計(jì)包括主控制器的設(shè)計(jì)、傳感器的設(shè)計(jì)、直流電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)。
2.1 主控制器的設(shè)計(jì)
采用ATMEL公司的ATmega128型帶128K字節(jié)FLASH 的在線可編程8位高性能、高效率的RISC 結(jié)構(gòu)單片機(jī)作為整個(gè)控制系統(tǒng)的核心,完成傳感器的檢測信號采集與伺服電機(jī)的運(yùn)動(dòng)控制。ATmega128單片機(jī)共有64個(gè)引腳,單片機(jī)資源如下:Port A-Port E、Port G作為一個(gè)8位雙向I/O口,Port F作為A/D轉(zhuǎn)換器的模擬輸入口或一個(gè)8位雙向I/O口,RESET是復(fù)位輸入引腳,XTAL1、XTAL2是晶振接入引腳,AVCC是是Port F和A/D轉(zhuǎn)換器的電源端,AREF是A/D轉(zhuǎn)換器的參考電源,PEN是串行下載的編程使能信號。
2.2 傳感器電路的設(shè)計(jì)
挖掘機(jī)器人控制系統(tǒng)采用了紅外發(fā)射管D1和一只紅外接收模塊U1構(gòu)成紅外線距離傳感器系統(tǒng),其中紅外接收模塊采用韓國Kodenshi公司的KSM-603LM,其內(nèi)部集成了紅外接收管,前置放大管,限幅放大管,帶通濾波器峰值檢波器,整流電路和輸出放大電路,靈敏度很高,如圖3所示。它的功能是主要用來檢測前方、左側(cè)、右側(cè)的障礙物。紅外線距離傳感器的測距基本原理為發(fā)光管發(fā)出紅外光,光敏接收管接收前方物體反射光,據(jù)此判斷前方是否有障礙物。根據(jù)發(fā)射光的強(qiáng)弱可以判斷物體的實(shí)際距離,它的原理是接收管接收的光強(qiáng)隨反射物體的距離而變化的,距離近則反射光強(qiáng),距離遠(yuǎn)則反射光弱。

圖3 紅外線傳感器系統(tǒng)原理圖
2.3 直流電機(jī)驅(qū)動(dòng)電路的設(shè)計(jì)
驅(qū)動(dòng)電路的選擇也是非常重要的,通常選用的驅(qū)動(dòng)電路是由晶體管控制繼電器來改變電機(jī)的轉(zhuǎn)向和進(jìn)退。這種方法適用于大功率電機(jī)的驅(qū)動(dòng),但對于中小功率的電機(jī)則極不經(jīng)濟(jì),因?yàn)槊總€(gè)繼電器要消耗20~100mA的電流。還可以使用組合三極管/MOSFET管的方法,但比較麻煩,電路也比較復(fù)雜,本設(shè)計(jì)采用集成電路的驅(qū)動(dòng)方法,極大增強(qiáng)了電路可靠性和簡明性。
選用SGS公司的恒壓恒流橋式驅(qū)動(dòng)芯片L293,其內(nèi)部包含4通道邏輯驅(qū)動(dòng)電路,額定工作電流為1A,最大可達(dá)1.5A,Vss為集成芯片工作電壓,電壓最小為4.5V,Vs為輸出給電機(jī)的電壓,最大可達(dá)36V,Vs電壓必須比Vss電壓高。由L293構(gòu)成的電機(jī)驅(qū)動(dòng)電路如圖4所示。
直流電機(jī)轉(zhuǎn)速采用ATmega128兩路PWM控制輸出電壓,通過編程使占空比以1/16的最小間隔在1/16-14/16間變化,以實(shí)現(xiàn)速度的調(diào)節(jié)。
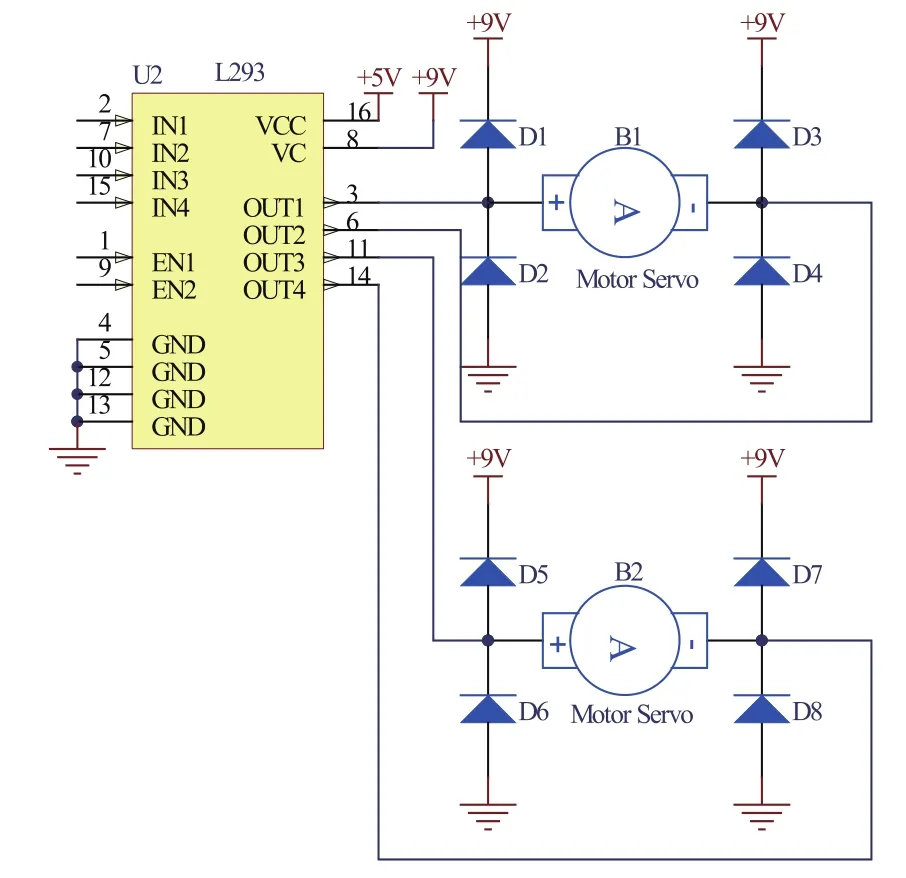
圖4 L293電機(jī)驅(qū)動(dòng)電路
3 控制系統(tǒng)的軟件設(shè)計(jì)
控制系統(tǒng)軟件與硬件電路緊密結(jié)合共同實(shí)現(xiàn)對挖掘機(jī)器人的控制,基本設(shè)計(jì)思想是挖掘機(jī)器人在動(dòng)作過程中,由自身的紅外檢測裝置即時(shí)從外界采集信號。其中,紅外線距離傳感器分別安裝在傳感器系統(tǒng)的前方、左側(cè)、右側(cè)。當(dāng)按下挖掘機(jī)器人啟動(dòng)按鈕時(shí),挖掘機(jī)器人進(jìn)入初始化的狀態(tài),然后挖掘機(jī)器人向前行進(jìn)。當(dāng)紅外線距離傳感器檢測到前方有障礙物時(shí),將信號傳給控制系統(tǒng),當(dāng)控制系統(tǒng)判定前方有障礙物,挖掘機(jī)器人做挖掘的動(dòng)作并且向右旋轉(zhuǎn)90度,然后繼續(xù)前進(jìn)。反之,挖掘機(jī)器人繼續(xù)前進(jìn);當(dāng)傳感器檢測到左邊位置有障礙物時(shí),挖掘機(jī)器人的機(jī)械臂向左旋轉(zhuǎn)90度后回到初始位置,然后繼續(xù)前進(jìn),反之挖掘機(jī)器人繼續(xù)前進(jìn);當(dāng)傳感器檢測到右邊有障礙物,挖掘機(jī)器人的機(jī)械臂向右旋轉(zhuǎn)90度后回到初始位置,然后繼續(xù)前進(jìn),反之挖掘機(jī)器人繼續(xù)前進(jìn)。挖掘機(jī)器人的運(yùn)動(dòng)控制流程圖如圖5所示。

圖5 挖掘機(jī)器人運(yùn)動(dòng)控制流程圖
4 結(jié)論
在完成了軟、硬件研究的基礎(chǔ)上,組裝了挖掘機(jī)器人樣機(jī),并進(jìn)行了實(shí)驗(yàn)。樣機(jī)結(jié)構(gòu)如圖6所示。
該機(jī)器人在模擬場地經(jīng)過多次試驗(yàn),系統(tǒng)實(shí)現(xiàn)預(yù)期動(dòng)作并且運(yùn)行平穩(wěn)可靠,抗干擾能力強(qiáng),不僅滿足了機(jī)電專業(yè)學(xué)生課內(nèi)實(shí)驗(yàn)和課外競賽的要求,同時(shí)也為智能機(jī)器人搭建了良好的控制平臺,達(dá)到了預(yù)期的效果,但是其智能化程度還有待提高。
[1] 柴旺興,趙文兵.基于紅外傳感器的智能車電機(jī)調(diào)速系統(tǒng)設(shè)計(jì)[J].北京:中國科技信息,2009(2).
[2] 丹尼斯·克拉克,邁克爾·歐文斯.機(jī)器人設(shè)計(jì)與控制[M].北京:科學(xué)出版社,2004.
[3] 朱俊.智能小車的自動(dòng)化控制[J].常州信息職業(yè)技術(shù)學(xué)院學(xué)報(bào),2006(12):16-18.
[4] 汪木蘭,張崇巍,謝震.通用型機(jī)器人關(guān)節(jié)控制器的研制[J].制造業(yè)自動(dòng)化,2005,27(5):35-37,41.
[5] 汪木蘭,張崇巍,饒華球,等.多關(guān)節(jié)機(jī)器人通用體系結(jié)構(gòu)的研究[J].機(jī)床與液壓,2005(2):60-62.
[6] 宗光華.機(jī)器人的創(chuàng)意設(shè)計(jì)與實(shí)踐[M].北京航空航天大學(xué)出版社,2004.
[7] 汪木蘭,饒華球,徐開蕓,等.NGR01型機(jī)器人電氣控制系統(tǒng)統(tǒng)設(shè)計(jì)[J].組合機(jī)床與自動(dòng)化加工技術(shù),2003(4):57-59.
[8] 馬潮.AVR單片機(jī)嵌入式系統(tǒng)原理與應(yīng)用實(shí)踐[M].北京航空航天大學(xué)出版社,2007.
TP241
A
1009-0134(2010)12(上)-0045-03
10.3969/j.issn.1009-0134.2010.12(上).16
2010-07-24
江蘇省高等學(xué)校大學(xué)生實(shí)踐創(chuàng)新訓(xùn)練計(jì)劃項(xiàng)目
沈旭(1963 -),男,副教授,碩士,研究方向?yàn)楣こ虣C(jī)械。
猜你喜歡
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年12期)2018-08-01 00:48:04
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
電子制作(2017年19期)2017-02-02 07:08:27
