基于智能P I D整定的溫度控制系統設計
2010-04-04 09:04:30康潔
科學之友 2010年12期
康 潔
(1.太原理工大學信息工程學院,山西 太原 030024;2.太原廣播電視大學,山西 太原 030000)
1 引言
PID控制是最早發展起來的控制策略之一,由于其算法簡單、魯棒性好及可靠性高,被廣泛應用于過程控制和運動控制中,尤其適用于可建立精確數學模型的確定性系統。然而實際工業生產過程往往具有非線性、時變不確定性,難以建立精確的數學模型,應用常規PID控制器不能達到理想的控制效果,而且在實際生產現場中,由于受到參數整定方法繁雜的困擾,常規PID控制器參數往往整定不良、性能欠佳,對運行工況的適應性很差。
計算機技術和智能控制理論的發展為復雜、動態、不確定系統的控制提供了新的途徑。采用智能控制技術,可設計智能PID控制器和進行PID參數的智能整定。
本設計以電阻爐為控制對象,采用機理分析法對電阻爐加溫時的溫度對象進行分析,得到電阻爐的數學模型。針對電阻爐實際生產過程對溫度控制的要求及其所具有的時滯性、非線性、模型結構不確定等特點,結合模糊控制技術和常規PID控制方法,組成模糊自整定PID控制器。運用MATLAB軟件分別用常規PID控制和模糊自整定PID控制對電阻爐溫控系統進行仿真實驗。通過仿真結果的對比,加深對PID控制及智能PID整定的優越性的理解。
2 系統方案論證
2.1 常規PID控制
PID控制具有結構簡單、穩定性能好、可靠性高等優點,尤其適用于可建立精確數學模型的確定性控制系統。在控制理論和技術飛速發展的今天,工業過程控制領域仍有大量回路在應用PID控制策略。PID控制中一個關鍵的問題便是PID參數的整定,傳統的方法是在獲取對象數學模型的基礎上,根據某一整定原則來確定參數。但是在實際的應用中,許多被控過程機理復雜,具有高度非線性、時變不確定性和純滯后等特點。在噪聲、負載擾動等因素的影響下,過程參數甚至模型結構會隨時間和工作環境的變化而變化。在這種情況下,要求PID參數的整定減少對對象數學模型的依賴,并且PID參數能夠在線整定,以滿足實時控制的要求。
2.2 模糊控制
模糊邏輯控制,簡稱模糊控制,它以模糊數學、模糊語言形式的知識表示和模糊邏輯規則推理為理論基礎,其基本思想是利用計算機來實現人的控制經驗,而這些經驗多使用語言表達的具有相當模糊性的控制規則。模糊控制器之所以能獲得巨大成功,主要是因為:
(1)模糊控制是一種基于規則的控制。它直接采用語言性控制規則,其出發點是現場操作人員的控制經驗或相關專家的知識,在設計中不需要建立被控對象的精確數學模型,因而使得控制機理和策略易于接受和理解,設計簡單,便于應用。
(2)模糊控制算法是基于啟發性的知識及語言決策規則設計的,這有利于模擬人工控制的過程和方法,增強控制系統的適應能力,使之具有一定的智能水平。
(3)模糊控制系統的魯棒性較強,干擾和參數變化對控制效果的影響被大大減弱,尤其適合于非線性、時變及純滯后系統的控制。
基于此,將模糊控制與PID控制結合起來得到一種復合控制,即模糊參數自適應PID控制。它是在一般PID控制系統的基礎上加上一個模糊控制規則環節構成的。模糊控制單元根據當前的誤差e(k)及其變化量ec(k),結合被控過程動態特性的變化,通過模糊規則推理,對 PID控制器的三個參數 KP、KI、KD進行在線調整,從而實現了對PID參數的智能整定,且適用于普遍的工業被控對象。
3 系統建模
本設計所選電阻爐功率為10 W,經過對電阻爐工作原理的分析,采用實驗的方法得到其數學模型為:
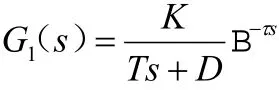
可見,該系統為一階慣性加滯后的系統。同時實驗過程中還發現,當爐溫升高時,系統的參數會發生變換。
4 系統設計
4.1 爐溫控制的工作原理
溫度控制系統的被控對象是電阻爐,被控參數為爐內溫度,由熱電偶檢測爐內實際溫度,經過溫度變送器轉換為0~5 V的電壓信號,經計算機采集后與設定溫度進行比較,模糊控制器根據設定溫度與實際溫度的溫差及溫度的變化率,利用模糊控制算法求出控制輸出量。該輸出量穿入PID控制器,調整控制參數,控制可控硅調壓器的輸入,使可控硅的導通角改變。導通角越大,輸送到電阻爐兩端的交流電壓就會愈高,電阻爐的輸入功率也就增大,爐溫上升;反之,導通角減小,電阻爐輸入功率減小,依靠環境自然冷卻。爐溫偏差為零時,可控硅保持一定的導通角,電阻爐輸入一定的功率,使爐溫穩定在給定值。
4.2 模糊控制器的設計
參數自適應模糊PID控制器由模糊化、模糊推理和模糊判決3部分構成。模糊控制的關鍵在于模糊規則的合理性,它決定了對PID參數的調節機理及過程。由工業過程的定性認識出發,比較容易建立語言控制規則,因而模糊控制對那些數學模型難以獲取、動態特性不易掌握或變化非常顯著的對象非常適用。
自適應模糊PID控制器以誤差e和誤差變化ec作為輸入,可以滿足不同時刻的e和ec對PID參數自整定的要求。利用模糊控制規則在線對PID參數進行修改,便構成了自適應模糊PID控制器,其結構見圖1。

圖1 自適應模糊控制器結構
4.3 模糊控制規則
模糊控制規則是根據已知量e、ec求得輸出量Δkp、Δki、Δkd的推理規則,采用if-then的條件語句形式,即:If e(k)=Aiand ec(k)=Bithen kp=Ci,ki=Di,kd=Ei。
4.4 模糊推理
以kp為例說明推理過程,ki、kd可類似得到。對模糊規則:If e(k)=Aiand ec(k)=Bithen kp=Ci。
前面強度的求取采取隸屬度相乘的形式,即對于某一取值e(k)和 ec(k),分別有 uAi(e(k))和 uBi(ec(k)),故可得到 ui=uAi(e(k))·uBi(ec(k))。然后將 ui賦給后件 kp的隸屬度,即令 uCi(xi)=ui,則有 kpi=xi。
4.5 模糊判決
模糊判決采用重心法由 e (k)、ec(k)的隸屬度函數形狀知,當其某一特定值時,所涉及的控制規則可以為一條、兩條或四條,且對于前件強度總有所以反模糊化由下式實現:同理對于ki、kd,分別有
5 MATLAB仿真
5.1 常規PID仿真結果
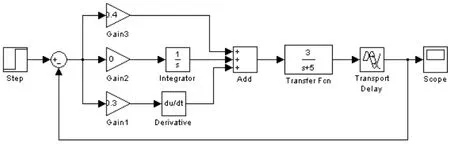
圖2 常規PID控制的simlik仿真
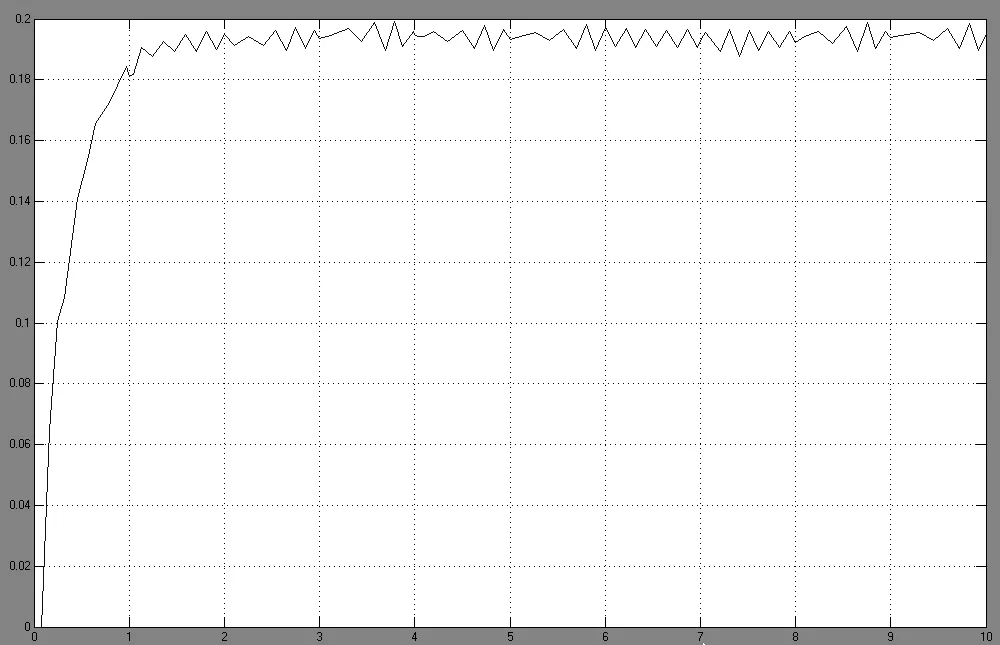
圖3 常規PID控制的響應結果
圖3 PID三個參數為ki=0、kp=0.41、kd=0.3,該系統為一階慣性加滯后的系統。同時實驗過程中發現,當爐溫升高時,系統的參數會發生變換,通過仿真圖我們還可以看到,常規PID超調量大,時間延遲長,控制誤差很大。
5.2 模糊控制仿真結果
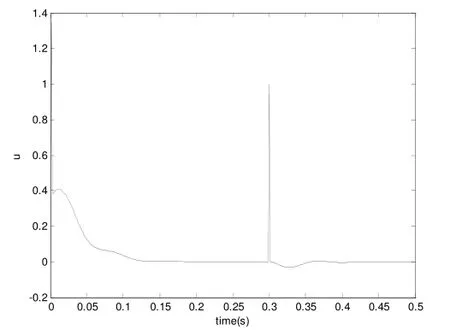
圖4 控制器輸出u
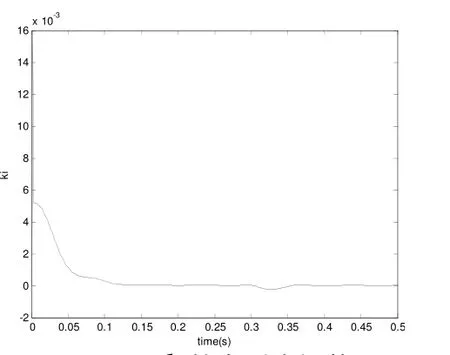
圖5 ki的自適應調整

圖6 kp的自適應調整
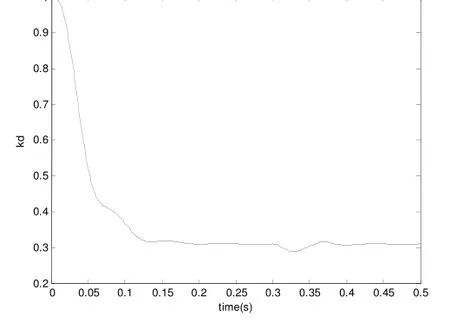
圖7 kd的自適應調整
由上述仿真結果可以看出:經過模糊自適應整定后,控制效果良好,穩態誤差接近于0,此時,PID三參數分別為:ki=0、kp=0.41、kd=0.3。系統加入模糊控制器后,雖然被控對象發生了參數變化,但由于模糊控制器能夠根據系統誤差和誤差變化率對PID的3個參數(KP、KI、KD)進行在線修正,所以我們所得到的系統動態響應曲線比較好,響應速度較快,超調小甚至無超調,當系統的溫度設定值改變時,系統可以很好的跟隨,這說明在常規PID控制中引入模糊控制器確實能很好地適應系統的突變要求。
6 總結
此設計是以電阻爐為控制對象,利用MATLAB這一仿真工具,分別以常規PID控制和模糊自整定PID控制對系統進行了仿真,通過對兩者的仿真結果進行比較,總結出在電阻爐在外界條件相同條件下,模糊自整定PID控制具有更好的控制效果。
1 李靜萍、謝邦昌.多元統計分析方法與應用.北京:中國人民大學出版社,2008
2 王 巖、隋思漣、王愛青.數理統計與MATLAB工程數據分析.北京:清華大學出版社,2006
3 樓順天.基于 MATLAB的系統分析與設計——模糊系統.西安:西安電子科技大學出版社,2004
4 李國勇.智能控制及其MATLAB實現.北京:電子工業出版社,2005.5
5 張國良、曾 靜、柯熙政、鄧方林.模糊控制及其MATLAB應用.西安:西安交通大學出版社,2002
6 Richard A Johnson, Dean W Whichern.Applied Multivariate Statistical Analysis.北京:清華大學出版社,2008
7 張化光、孟祥萍.智能控制基礎理論及應用.北京:機械工業出版社,2005.2
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:26:14
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
Coco薇(2017年11期)2018-01-03 20:59:57