基于連續(xù)測角的被動測距技術(shù)研究
2010-03-26 07:31:56申波朱斌龍波郭立新
電子設(shè)計工程 2010年12期
申波,朱斌,龍波,郭立新
(西南技術(shù)物理研究所四川成都610041)
在偵察定位目標(biāo)過程中,目標(biāo)距離是影響系統(tǒng)安全和武器首發(fā)命中的重要因素,其準確度影響到能否準確避開敵方威脅源的攻擊,并對敵方目標(biāo)進行精確的打擊,所以探測目標(biāo)的距離便成為關(guān)鍵技術(shù)之一。
測距技術(shù)可分為主動和被動測距2種。前者是通過自身發(fā)射大功率信號探測目標(biāo),通過分析目標(biāo)信息確定目標(biāo)的距離,但是由于主動測距技術(shù)自身需要發(fā)射探測信號,在實戰(zhàn)中不便于隱蔽自己,容易被敵方發(fā)現(xiàn),而遭受干擾甚至毀滅性打擊。其探測精度較高,但是探測距離卻比較有限;而后者又稱為無源定位技術(shù),是通過探測目標(biāo)自身的輻射信息、角度信息或其他信息,并對其分析來確定目標(biāo)距離。該技術(shù)不需自身發(fā)射探測信號,從而能夠很好地隱蔽自己,具備極強的生存能力和抗干擾能力,被動測距技術(shù)可省略成本較高的發(fā)射單元,具有較高的性價比。二者相比,被動測距技術(shù)具有更遠的探測能力。
1 系統(tǒng)模型的建立
機載紅外搜索跟蹤系統(tǒng)在發(fā)現(xiàn)并跟蹤上目標(biāo)后,可以連續(xù)獲得目標(biāo)的角度數(shù)據(jù)。在沒有目標(biāo)任何位置信息的情況下,利用這些角度數(shù)據(jù),通過建立合適的模型,選用合適的濾波算法,就可以有效地估計出目標(biāo)的距離。在空間極坐標(biāo)系中,載機跟蹤運動目標(biāo)時,目標(biāo)的三維運動狀態(tài)如圖1所示。
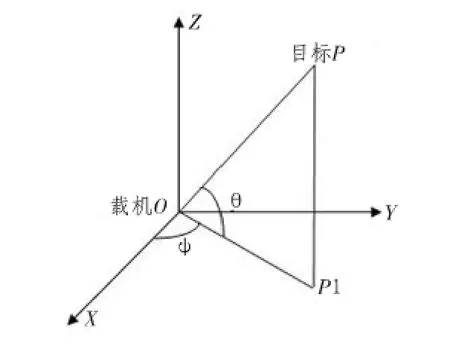
圖1 空間極坐標(biāo)系三維運動示意圖Fig.1 Schematic diagram of three-dimensional motion in the polar coordinates
描述目標(biāo)三維運動的狀態(tài)向量表示如下:

式中,θ和φ分別是目標(biāo)的俯仰角和方位角,其導(dǎo)數(shù)分別為對應(yīng)角速度,ω是方位角速度的分量,R是目標(biāo)與觀測平臺間的相對距離,其導(dǎo)數(shù)為目標(biāo)與觀測平臺間的相對速度。
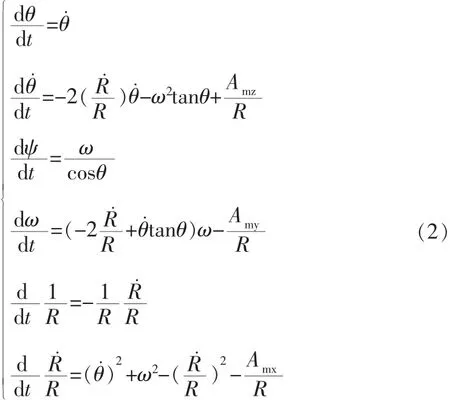
這些狀態(tài)向量滿足以下方程組:式中,Amx,Amy,Amz為觀測平臺本身的加速度,可作為已知量處理[1]。
基于測角的被動測距方法的觀測向量為方位角和俯仰角,即:

可得測量矩陣為

2 可觀測性分析
對于非線性系統(tǒng)的可觀測性,工程研究中常采用Lee和Dum等人提出的可觀測性定理來分析。
定理對于非線性系統(tǒng),

如果對于凸集s∈Rn上的所有x0,都有

是正定的,則系統(tǒng)在s上是完全可觀測的。
上述定理是針對連續(xù)系統(tǒng)的,對于非線性的離散系統(tǒng),與此可觀測性定理等價的結(jié)論是:對于初始集合s中的n維矢量Xk0,記

如果存在正整數(shù)N使矩陣A(i,i+N-1)的秩滿足:

則系統(tǒng)在s上是完全可觀測的[2]。
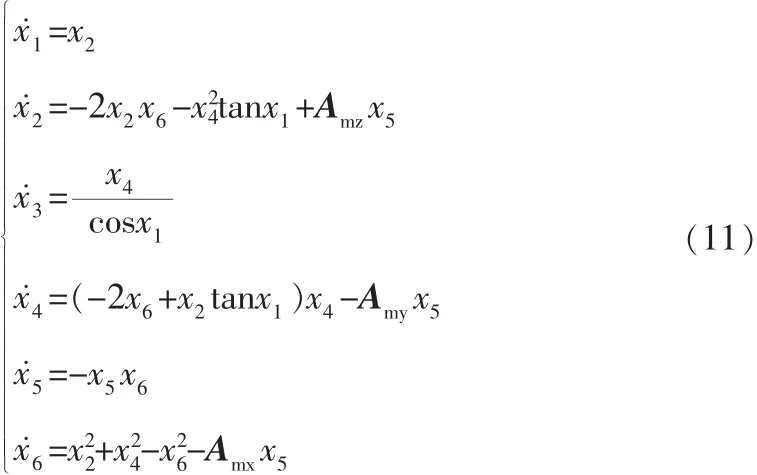
在空間極坐標(biāo)系下,設(shè)系統(tǒng)的狀態(tài)變量為

由狀態(tài)向量滿足的狀態(tài)方程式(2),可得
可得狀態(tài)轉(zhuǎn)移矩陣

由于狀態(tài)向量是6×1維向量,而觀測向量是2×1維向量,所以進行N=3次觀測,得到3個觀測矢量,可得

從而可以求出Γ矩陣,并得出其行列式為

如果rankA=6,則根據(jù)前面所述非線性系統(tǒng)的可觀測性定理可知,此時系統(tǒng)是可觀測的。由于矩陣A是6×6方陣,所以rankΓ的充要條件是det A≠0。
由式(14)可以看到觀測平臺加速度分量Amy和Amz如果同時為0,則detA=0,此時系統(tǒng)不可觀測。所以可知要系統(tǒng)是可觀測的,則觀測平臺加速度必定不能為0,即觀測平臺必須作機動,也就可以得出載機作機動是本系統(tǒng)模型可觀測的必要條件。
3 濾波算法
在光電雷達獲取目標(biāo)的角度數(shù)據(jù)之后,需要選取合適的濾波算法來進行濾波估計,而得出目標(biāo)相對載機的距離。基于本系統(tǒng)是非線性系統(tǒng),故采用非線性濾波算法來進行濾波。常用的非線性濾波算法有:擴展卡爾曼濾波算法(EKF)[3-4]、修正協(xié)方差的擴展卡爾曼濾波算法(MVEKF)[5],修正增益的擴展卡爾曼濾波算法(MGEKF)[6]和不敏卡爾曼濾波算法(UKF)[7]。
對于非線性濾波問題,通常的處理方法是利用線性化技巧將非線性問題轉(zhuǎn)化為一個近似的線性濾波問題,套用線性濾波理論得到求解原非線性濾波問題的次優(yōu)濾波算法。擴展卡爾曼濾波算法(EKF)是用泰勒級數(shù)將非線性的狀態(tài)方程進行一階或二階展開,對狀態(tài)方程進行線性化。
修正協(xié)方差的擴展卡爾曼濾波(MVEKF),其基本思想是在EKF方法中采用更新的狀態(tài)值X^(k+1/k+1)重新計算雅克比矩陣,并用此新的雅克比矩陣作為測量矩陣對協(xié)方差矩陣進行更新,從而得到更加準確的修正協(xié)方差矩陣。
修正增益的擴展卡爾曼濾波(MGEKF),其基本思想是在EKF方法中計算更新濾波協(xié)方差矩陣時,用一個修正增益函數(shù)矩陣g(Zk+1,X^(k+1)/k)來代替量測矩陣Hk+1(X^(k+1)/k)。這個修正增益函數(shù)矩陣g(Zk+1,X^(k+1)/k)嚴格滿足以下關(guān)系式:

其優(yōu)點在于用可以減小觀測方程的線性化誤差,提高濾波精度。
不敏卡爾曼濾波(UKF)是用于計算經(jīng)過非線性變換的隨機變量統(tǒng)計的一種新方法。它不需對非線性狀態(tài)和測量模型進行線性化,而是對狀態(tài)變量的后驗概率密度函數(shù)(PDF)進行近似化,進行不敏變換(UT變換),表現(xiàn)為一系列選取好的采樣點,這些采樣點完全體現(xiàn)了高斯密度的真實均值和協(xié)方差。
4 仿真實驗
為對基于連續(xù)測角的被動測距方法的可行性和適用性進行驗證[8],分別用擴展卡爾曼濾波算法(EKF)、修正協(xié)方差的擴展卡爾曼濾波算法(MVEKF)、修正增益的擴展卡爾曼濾波算法(MGEKF)和不敏卡爾曼濾波算法(UKF)進行了仿真實驗。仿真實驗參數(shù)設(shè)置為:目標(biāo)在相對載機初始距離為70 km處作勻速直線運動,速度230 m/s,載機在x方向上作勻速直線運動,速度250 m/s,在y方向上作S形機動。光電雷達掃描周期T=1 s,掃描次數(shù)N=200,初始距離取為100 km,距離的標(biāo)準差為10 km,速度的標(biāo)準差為100 m/s,測量噪聲標(biāo)準差取為σθ=σφ=2 mrad。采用蒙特卡洛方法對跟蹤濾波器進行仿真,仿真次數(shù)為100次。
4.1 系統(tǒng)可觀測性驗證
上述討論了載機機動是系統(tǒng)可觀測的必要條件,仿真實驗的驗證結(jié)果如圖2所示。

圖2 系統(tǒng)可觀測性驗證Fig.2 Validating the observability of system
由圖2可以發(fā)現(xiàn)這幾種濾波算法仿真的結(jié)果均是完全偏離真實軌跡,無法完成測距,可見在載機不作機動的情況下,系統(tǒng)是不可觀測的。
4.2 濾波算法比較
在相同的仿真條件下,選用EKF、MVEKF、MGEKF和UKF 4種濾波算法,對其濾波效果進行比較,仿真結(jié)果如圖3所示。
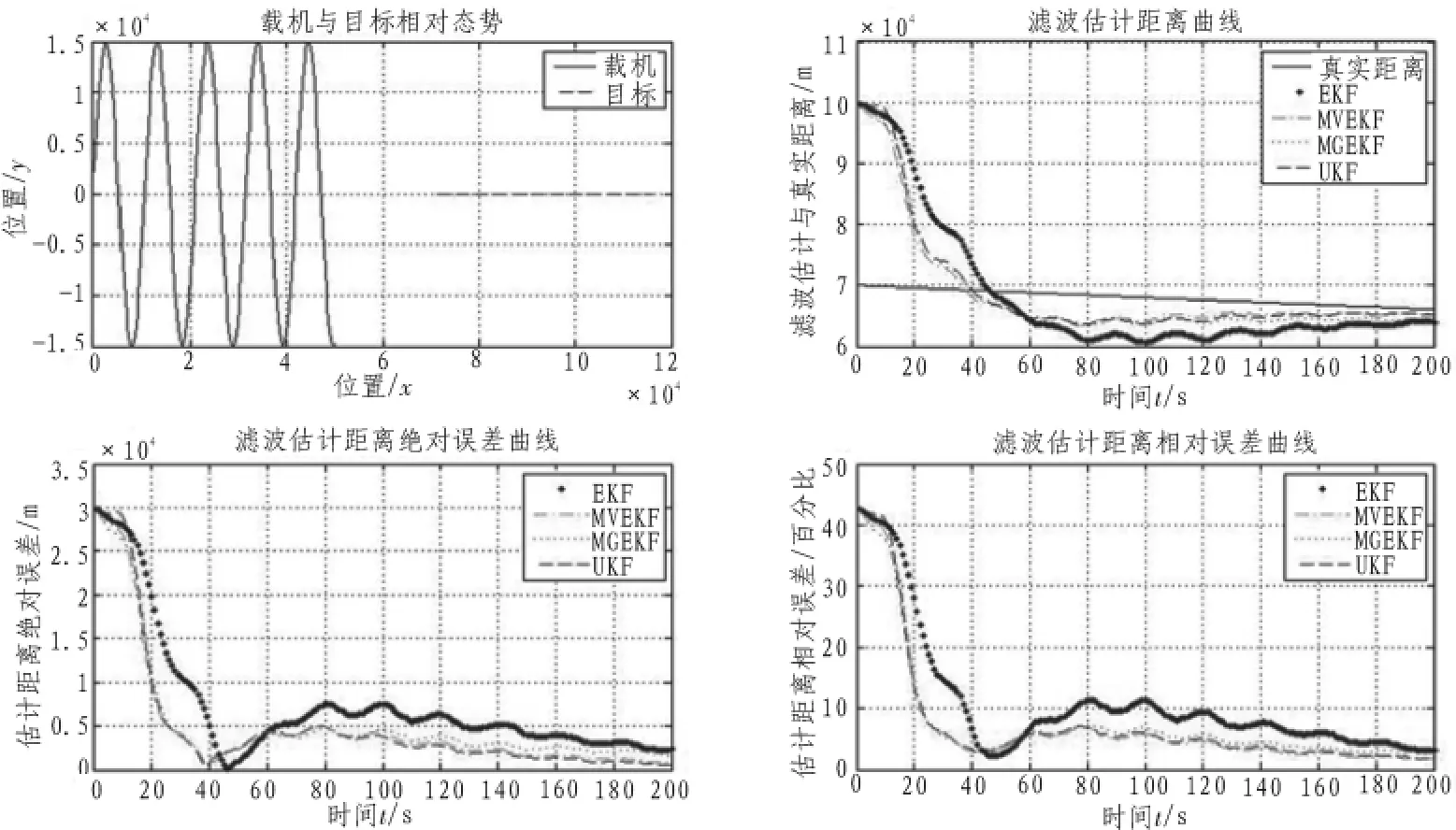
圖3 仿真實驗濾波估計曲線圖Fig.3 Graph diagram of the simulation
由圖3可以看出,在載機作S形機動的情況下,幾種濾波算法都很好的完成了收斂,并獲得了距離的估計值。這幾種濾波算法的最終估計精度都達到了5%以內(nèi),具有較高的精度。
MVEKF、MGEKF和UKF均在20 s左右就可以迅速完成收斂,EKF則在40 s左右進入收斂。這4種濾波算法中,MVEKF、MGEKF和UKF的濾波效果差別不大,均比EKF的濾波效果要好。
5 飛行實驗
為了對此被動測距方法的可行性和適用性進行驗證,組織了飛行實驗。通過光電雷達記錄的實驗數(shù)據(jù),對此方法的被動測距效果進行分析和評價。
飛行實驗中,載機作S形機動,目標(biāo)機作勻速直線運動,在空間直角坐標(biāo)系下其運動狀態(tài)如圖4所示。

圖4 載機與目標(biāo)相對運動態(tài)勢圖Fig.4 Situation map of the relative motion between the plane and the target
用EKF、MVEKF、MGEKF和UKF 4種算法進行被動測距,濾波估計曲線如圖5所示。
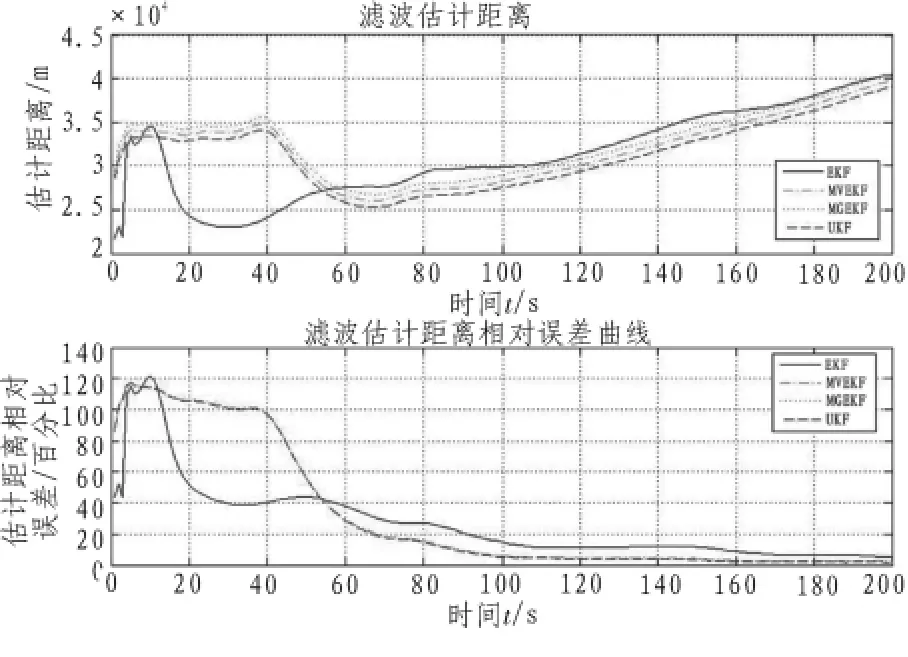
圖5 飛行實驗濾波估計曲線Fig.5 Graph of the flight experiment
通過飛行實驗,基于連續(xù)測角的被動測距方法得到了目標(biāo)最終的距離值和相對誤差,列表如表1所示。

表1 實驗結(jié)果比較Tab.1 Comparision of experiment results
由圖5和表1可以看出,實驗所測得的目標(biāo)距離精度較高,濾波算法獲得的精度值均達到了5%以內(nèi)。實驗表明,該測距方法能夠應(yīng)用于工程實踐中,具有很高的實用價值和現(xiàn)實意義。
6 結(jié)論
本文基于連續(xù)測角的被動測距方法,在空間坐標(biāo)系中構(gòu)建了系統(tǒng)模型,對其可觀測性進行了分析,得出載機機動是系統(tǒng)可觀測的必要條件。然后通過仿真實驗和飛行實驗,對該測距方法的可行性與實用性進行了驗證。
基于連續(xù)測角的被動測距技術(shù)通過觀測目標(biāo)的角度信息,建立合適的系統(tǒng)模型,選用合適的濾波算法,可以估測出目標(biāo)的距離值。這種測距方法精度高,收斂快,效果好,是無源定位系統(tǒng)中一種重要的測距手段。
[1]趙勛杰,高稚允.光電被動測距技術(shù)[J].光學(xué)技術(shù),2003,29,(6):652-656.
ZHAO Xun-jie,GAO Zhi-yun.Opto-electrical technique of passive detection[J].Optical Technology,2003,29(6):652-656.
[2]馮道旺,李宗華,周一宇等.一種單站無源定位方法及其可觀測性分析[J].國防科技大學(xué)學(xué)報,2004,26(1):68-71.
FENG Dao-wang,LI Zong-hua,ZHOU Yi-yu,et al.A method of single-step passive location and the analysis of its observability[J].Journal of National University of Defense Technology,2004,26(1):68-71.
[3]何友,修建娟,張晶煒,等.雷達數(shù)據(jù)處理及應(yīng)用[M].北京:電子工業(yè)出版社,2006.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Processing and analysis of radar data[M].Beijing Publishing House of Electronic Industry,2006.
[4]Guerci J R,Goetz R A.A method for improving extended Kalman filter performance for angle-only passive ranging[J].IEEE Transactions on Aerospace and Electronic System,1994,30(4):1090-1093.
[5]趙國偉,李勇,李滔.基于MVEKF算法的機載單站無源定位[J].西北工業(yè)大學(xué)學(xué)報,2007,25(1):113-116.
ZHAO Guo-wei,LI Yong,LI Tao.Algorithm for passive location based on MVEKF[J].Journal of Northwestern Polytechnical University,2007,25(1):113-116.
[6]浦甲倫,韋常柱,容思遠.修正增益卡爾曼濾波算法在被動測距問題中的應(yīng)用[J].宇航學(xué)報,2007,28(4):886-889.
PU Jia-lun,WEI Chang-zhu,RONG Si-yuan.The application of MGEKF in the passive detection[J].Journal of Astronautics,28(4):886-889.
[7]王淑一,程楊,楊滌,等.UKF方法及其在方位跟蹤問題中的應(yīng)用[J].飛行力學(xué),2003,21(2):59-62.
WANG Shu-yi,CHEN Yang,YANG Di,et al.UKF and its application to bearings-only tracking problem[J].Flight Dynamics,2003,21(2):59-62.
[8]張艷桃,袁兆強.基于雙端不同步采樣的同桿雙回線故障測距算法[J].陜西電力,2009,37(9):38-41.
ZHANG Yan-tao,YUAN Zhao-qiang.Two-terminal asynchronous data based fault location algorithm for double-circuit transmission lines on one pole[J].Shaanxi Electric Power,2009,37(9):38-41.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
測控技術(shù)(2018年12期)2018-11-25 09:37:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28