不確定性線性系統的H∞輸出反饋魯棒重復控制
2010-03-24 06:10:40蘇寶庫
哈爾濱工業大學學報 2010年11期
蘇寶庫,趙 富,2,劉 雨
(1.哈爾濱工業大學空間控制與慣性技術研究中心,哈爾濱150001,zhaofu9274@163.com; 2.北京航天控制儀器研究所,北京100854)
在許多工業應用中(如機器手、數字控制機床和轉臺等),參考信號或擾動信號經常是周期已知的周期性信號,并且這些實際應用要求伺服系統具有很高的定位精度和低速性能.文獻[1]基于內模原理提出了重復控制,在穩定的閉環系統內設置一個產生與參考信號或擾動信號同周期的內部模型,使得系統實現對周期性參考信號的漸近跟蹤或對周期性擾動信號的有效抑制.自從重復控制提出以來,許多學者對此展開了廣泛深入的研究,并且獲得了成功的應用[2-5].Hara和Yamamoto給出重復控制系統的穩定性條件[6].文獻[7]將有限維重復控制器應用于抑制轉臺控制系統的力矩擾動,但是要求被控對象無虛軸上的零點,沒有考慮系統存在不確定性的情況.由于H∞控制理論適合處理存在數據攝動和外界擾動時系統的魯棒控制問題,因此一些學者已經將H∞控制應用于分析和設計重復控制系統.Guvenc用1和-1分別代替內模中的時滯e-τs,利用結構奇異值理論分析連續重復控制系統魯棒穩定性和跟蹤性能,將原來無限維的問題簡化成一個有限維問題.但是用此方法設計鎮定控制器存在很大的保守性[8].文獻[9]在頻域空間中研究了魯棒重復控制器的設計問題,但是所提出的設計方法只能適用于最小相位系統.文獻[10]在給定系統鎮定控制器的基礎上,基于LMI約束條件提出設計重復控制器的方法.在文獻[10]的基礎上,吳敏等人在保證控制系統穩定性的基礎上提出了低通濾波器和狀態反饋控制器參數同時優化的方法[11].但是沒有考慮擾動對控制系統的影響.
基于以上文獻存在的缺點,本文針對不確定性線性系統提出一種重復控制器和輸出反饋控制器參數同時優化的方法,有效地解決了重復控制系統控制性能與系統穩定性之間的折衷問題,即使得乘性不確定性系統具有魯棒穩定性又提高系統的擾動抑制性能和跟蹤性能.將本文所提出的方法與文獻[10-11]的方法均應用于低頻線振動臺系統,仿真結果驗證了本文所提的方法具有更高的跟蹤精度,更具有實用性,并且使得系統具有魯棒性.
1 問題描述
設控制系統如圖1所示.其中,r,e,u,d,θ分別為參考輸入、輸出誤差、控制輸入、擾動信號、輸出信號.z1,z2為評價輸出.P(s)為被控對象的標稱模型,Δ(s)是被控對象未知的攝動函數(‖Δ(s)‖∞≤1),W2(s)表示Δ(s)的攝動界函數.M(s)是重復控制器,K(s)是輸出反饋控制器.d與θ存在非線性關系,即存在周期函數H(·),使得d=H(θ),它實際上構成了非線性反饋.

圖1 含有重復控制器的控制系統
本文考慮的問題是設計重復控制器M(s)和輸出反饋控制器K(s),抑制未知的周期性擾動d,提高系統的跟蹤精度.在圖1中設計重復控制器就是設計合適的低通濾波器Kq(s).
2 重復控制系統魯棒性能分析
2.1 控制系統魯棒穩定性分析
定理1 設被控對象P(s)含有穩定攝動Δ(s),且滿足‖Δ(s)‖∞≤1,當圖1的重復控制系統滿足

則重復控制系統對于任意Δ(s)是魯棒穩定的.
證明 考慮系統的魯棒穩定性,設r=d=0.從圖1中可以得到從w2到z2的傳遞函數為Gz2w2=-W2(s)T(s),然后利用小增益定理可以得到:當‖Gz2w2‖∞=‖W2(s)T(s)‖∞<1時,重復控制系統對于任意Δ(s)是魯棒穩定的.證畢.
2.2 控制系統擾動抑制性能分析
擾動抑制的目標是盡量減小擾動輸入d對評價輸出z1的影響,即實現

其中:S(s)=(1+P(s)K(s)M(s))-1.
由于Δ(s)在‖Δ(s)‖∞≤1的范圍內可任意取值,因此即使魯棒穩定條件成立,仍會存在這樣的Δ(s),使得在某些頻帶上

顯然,對于該攝動Δ(s),擾動抑制會極端惡化,所以,即使標稱系統性能和魯棒穩定性再好,也不能保證魯棒擾動抑制性能.
因此為實現擾動抑制性能,(1)和(2)必須同時滿足.由于(2)中含有攝動項Δ(s),在設計時,必須把這個條件轉變成不含攝動的一個條件,因此乘性攝動系統的擾動抑制性能問題等價于導入假想攝動Δf(s)(如圖2所示,其中‖Δf(s)‖∞<1)后的魯棒穩定問題.
因為‖e-τs‖∞=1,因此將圖2中的攝動Δf,Δ和e-τs分離出來.通過把圖2變形為圖3,魯棒抑制問題歸結為對具有對角結構型攝動的重復控制系統魯棒穩定性問題.

圖2 等價魯棒穩定問題

圖3 魯棒穩定性與魯棒性能
設被控對象P(s)的狀態空間表達式為

其中:xp∈Rn是被控對象的狀態向量,u∈Rm是控制輸入.
設擾動抑制加權函數W1(s)的狀態空間表達式為

設魯棒穩定加權函數W2(s)的狀態空間表達式為

選擇廣泛使用的低通濾波器Kq(s)=ωc/(s+ωc).
將低通濾波器Kq(s)轉化成如下的狀態空間表達式:

考慮圖3的重復控制系統的魯棒穩定性,可以令r=0.
利用(3)~(6)可以得到廣義被控對象F:

其中:

設廣義被控對象(7)的輸出反饋控制器K(s)的狀態空間表達式為


其中:

由于‖diag(Δf,Δ,e-sT)‖∞≤1,根據小增益定理可知,圖3所示的閉環系統魯棒穩定性的充分條件為
引理1[13]設γ>0,且G(s)的最小實現由(A,B,C,D)給出,則A是穩定陣,且‖G(s)‖∞<γ的充要條件是存在X>0滿足

定理2 設γ=1,Gzw由式(9)給出.如果存在
證明 設γ=1,Gzw由式(9)給出.由引理3的充分條件可以得到定理2的證明.證畢.
由于定理2使用對角型結構的攝動,導致保守性較大.鑒于此,在圖3中引入定標陣Q= diag(Q1,Q2,Q3),再利用小增益定理來確定系統魯棒穩定性的充分條件.在圖3中加入穩定的定標陣變形為圖4.
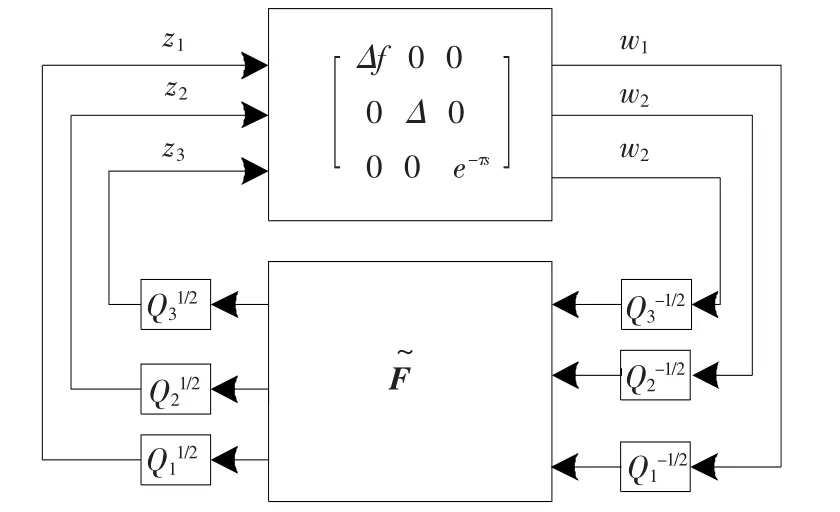
圖4 導入定標陣的結構圖
設Q=diag(Q1,Q2,Q3),利用小增益定理可知圖4的閉環系統魯棒穩定的充分條件為

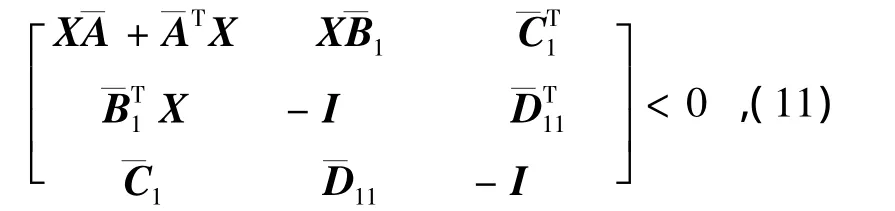
滿足式(12)的定標矩陣Q的條件歸結為如下LMI:

3 控制器設計

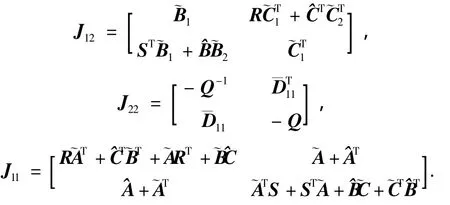
定義矩陣

定義變量:

式(13)變換成以下LMI:

其中:
注:矩陣不等式(14)不是線性的,無法便捷地得到控制器參數和ωc,下面的推論1給出了將非凸的矩陣不等式(14)轉化為非線性最小化問題求解.
推論1 給定一個參數ωc,將(14)轉化為如下的非線性最小化問題:

S.t.:


若其解為m+2且存在正定矩陣Q,Q1,R,S,則得到所要求的控制器參數表示矩陣的跡.
在上述的錐補線性化方法中很難通過數據方法保證min tr(Q·Q1)精確的等于m+2,所以用式(14)作為迭代終止的判定條件.下面給出具體的算法1:
2)求解如下的線性矩陣不等式最小化問題:

令求出的解為

3)將求出的解帶入式(16),如果滿足,則得到控制器增益若不滿足,且迭代次數大于設定的最大迭代次數 jmax,則系統無解,否則令j=j+1,轉到2).
理論上重復控制系統中低通濾波器的剪切頻率越大,系統的跟蹤精度越高[11],因此可以利用下面的算法2得到ωc的最大值及其對應的Ak,Bk,Ck.算法2的步驟如下:
1)首先確定算法1的最大迭代次數jmax,ωc的增加值Δωc>0,1>Δωc2>0,給定一個很小的ωc及算法2終止參數ε.
3)ωc=ωc+Δωc,利用算法1的方法求解如果有解,轉到3);如果無解,轉到4).
4)ωc,利用算法1的方法求解.如果無解,轉到4).如果有解,轉到3).當Δωc<ε時(一般ε選得很小),轉到5).
5)通過矩陣I-RS的奇異值分解,得到滿足MNT=I-RS的M,N.
6)從(14)式計算鎮定控制器參數Ak,Bk,Ck.
注1:文獻[10]提出一種求解低通濾波器剪切頻率ωc的算法,首先給定一個正定矩陣Q和標量μ>0,然后利用LMI求解ωc.由于正定矩陣Q和標量μ>0是人為給定的,因此該方法具有很大的保守性.文獻[11]的方法比文獻[10]的方法求解ωc的保守性小,但是沒有考慮系統的擾動抑制問題.本文提出的設計方法利用二分法逐漸尋找ωc的最大值及其對應的輸出反饋控制器參數,此方法沒有人為給定的參數,因此求解的ωc保守性小,并且使得系統的擾動抑制性能更強.
4 應用實例
為了驗證本文所提方法在實際應用中的有效性,對低頻線振動臺進行仿真研究,永磁直線同步電機(PMLSM)是其驅動部件,PMLSM的傳遞函數為可測反饋信號為低頻線振動臺的位置信號θ,期望軌跡為正弦信號0.1sin(10πt).外部擾動信號可寫成

其中:

設乘性不確定性 W2(s)=0.7(0.05s+ 1)/(0.035s+1),擾動抑制加權陣W1(s)= 100/(0.8s+1).
給定算法1和算法2的參數:Δωc=100,Δωc2=0.1,ε = 1,ωc= 0,jmax= 100.得到ωcmax=1 638,與ωcmax對應的輸出反饋控制器為K(s)=

簡化后為

為了驗證本文所提出方法的有效性,用文獻[10]和文獻[11]提出的方法與本文所提出的方法做比較.針對低頻線振動臺,文獻[11]的方法沒有可行解.利用文獻[10]的方法設計低頻線振動臺的重復控制器時,設系統不含不確定性,首先給定系統的鎮定控制器為及然后利用LMI的方法求得γ=2.208 4×104.
針對低頻線振動臺,采用本文所提出的方法設計的重復控制系統的位置誤差和采用文獻[10]提出的方法設計重復控制系統的位置誤差如圖5所示.
圖6為采用本文所提出的方法設計的重復控制系統的加速度頻譜圖.

圖5 魯棒重復控制的仿真結果

圖6 重復控制的低頻線振動臺加速度頻譜圖
很明顯,本文所提出的重復控制系統設計方法提高了低頻線振動臺的跟蹤性能.通過圖6可知低頻線振動臺的加速度失真度為1.34%,滿足系統的性能指標.
5 結論
本文提出的重復控制器和輸出反饋控制器的設計方法有效地抑制了乘性不確定性系統存在的周期性擾動,提高了系統的跟蹤性能.給出了計算重復控制器中低通濾波器最大的剪切頻率及其對應的輸出反饋控制器參數的迭代算法.仿真結果驗證該設計方法的有效性.
[1]FRANCIS B A,WONHAM W M.High accuracy control of a proton synchrotron magnet power supply[J].Applied Mathematices&Optimization,1975,2(2):216-221.
[2]PEDRO R S,ENRIQUE A.Dynamic voltage restorer based on flying capacitor multilevel converters operated by repetitive control[J].IEEE Transactions on Power Delivery,2009,24(2):951-960.
[3]FUJIMOTO H.RRO compensation of hard disk drives with multirate repetitive perfect tracking control[J]. IEEE Transactions on Industrial Electronics,2009,56 (10):3825-3831.
[4]ABRAHAM D R,HENDRIK T.Mouton and Hirofumi Akagi.DFT-based repetitive control of a series active filter integrated with a 12 pulse diode rectifier[J].IEEE Transactions on Power Electronics,2009,24(6):1515-1521.
[5]GOELE P,BRAM D,FARID A B,et al.Optimal performance tradeoffs in repetitive control:experimental validation on an active air bearing setup[J].IEEE Transactions on Control Systems Technology,2009,17 (4):970-979.
[6]HARA S,YAMAMOTO Y,OMATA T,et al.Repetitive control system:A new type servo system for periodic exogenous signals[J].IEEE Transactions on Automatic Control,1988,33(7):659-666.
[7]張東純,曾鳴,蘇寶庫.精密速率控制系統中位置周期擾動的動態補償一種有限維重復控制方法[J].宇航學報,2003,24(1):57-60.
[8]GUVENC L.Stability and performance robustness analysis of repetitive control systems using structured singular values[J].ASME Journal of Dynamic Systems,Measurement,and Control,1996,118(9):593-597.
[9]CHEN J W,LIU T S.H∞repetitive control for pickup head flying height in near-field optical disk drives[J].IEEE Transactions on Magnetics,2005,41(2):1067-1070.
[10]WEISS G,ZHONG Q C,GREEN T C,et al.H∞repetitive control of DC-AC converters in microgrids[J]. IEEE Transaction on Power Electronics,2004,19(1): 219-230.
[11]吳敏,蘭永紅,佘錦華,等.線性不確定系統的H∞狀態反饋魯棒重復控制[J].控制理論與應用,2008,25(6):427-433.
[12]梅生偉,申鐵龍,劉康志.現代魯棒控制理論與應用[M].北京:清華大學出版社,2003.
[13]DOH T Y,RYOO J R,CHUNG M J.Design of a repetitive controller:an application to the track-following servo system of optical disk drives[J].IEE Proc.Control Theory and Applications,2006,153(3):323-330.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
