一種電容式閉環(huán)微加速度計(jì)系統(tǒng)
2010-03-24 06:11:20陳偉平王天陽(yáng)陳曉亮郭玉剛劉曉為
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2010年11期
陳偉平,王天陽(yáng),尹 亮,陳曉亮,郭玉剛,劉曉為
(哈爾濱工業(yè)大學(xué)MEMS中心,哈爾濱150001,wangtianyang1986@163.com)
隨著硅微加工技術(shù)的不斷成熟,硅加速度計(jì)已經(jīng)在傳感器市場(chǎng)占據(jù)著越來(lái)越重要的地位,小型化、智能化、集成化已成為加速度傳感器的發(fā)展方向,其應(yīng)用也逐步擴(kuò)展到各個(gè)領(lǐng)域[1].十幾年來(lái),盡管在微加速度設(shè)計(jì)和制作工藝等方面進(jìn)行了很多有意義的研究[2-4],但在系統(tǒng)控制方面的研究還是比較有限的[5].典型的電容式加速度傳感器結(jié)構(gòu)是由兩個(gè)固定電極和一個(gè)可動(dòng)電極組成,可動(dòng)電極作為公共極板與兩固定電極形成一對(duì)差分電容.當(dāng)有加速度作用時(shí),可動(dòng)極板就會(huì)偏離平衡位置,從而使差分電容產(chǎn)生與加速度成比例的不平衡輸出,通過(guò)檢測(cè)此輸出即可測(cè)得加速度的大小.這種開(kāi)環(huán)加速度傳感器結(jié)構(gòu)比較簡(jiǎn)單,但在系統(tǒng)帶寬、線性度和動(dòng)態(tài)范圍等方面受到很大限制.一種有效的解決辦法就是應(yīng)用閉環(huán)控制系統(tǒng),在固定極板上加一反饋力,使其保持在平衡位置,通過(guò)檢測(cè)反饋力即可測(cè)得加速度的大小[6].這種閉環(huán)微加速度傳感器具有線性度好、動(dòng)態(tài)范圍大等優(yōu)點(diǎn),廣泛應(yīng)用于高精度的加速度計(jì)設(shè)計(jì)中.本文在一種梳齒電容結(jié)構(gòu)的基礎(chǔ)上,建立了閉環(huán)系統(tǒng)的數(shù)學(xué)模型,并在系統(tǒng)的設(shè)計(jì)中引入PID控制補(bǔ)償,通過(guò)仿真分析研究了PID控制參數(shù)對(duì)系統(tǒng)的影響,大大提高了加速度傳感器的性能.
1 加速度傳感器結(jié)構(gòu)
基于ICP刻蝕和鍵合工藝設(shè)計(jì)的傳感器結(jié)構(gòu)如圖1所示,該結(jié)構(gòu)包括上下固定電極和與H型質(zhì)量塊相連的可動(dòng)電極組成.質(zhì)量塊通過(guò)折疊梁與左右鍵合塊連接.該結(jié)構(gòu)具有敏感質(zhì)量大、檢測(cè)電容大、靈敏度高等優(yōu)點(diǎn).理論分析和仿真給出該 結(jié)構(gòu)的主要性能參數(shù)如表1所示.

表1 傳感器結(jié)構(gòu)參數(shù)
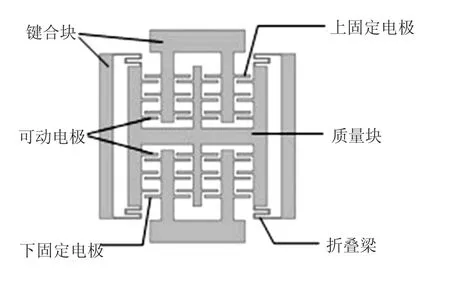
圖1 傳感器結(jié)構(gòu)示意
2 閉環(huán)加速度計(jì)系統(tǒng)
2.1 微結(jié)構(gòu)模型
傳感器微結(jié)構(gòu)模型如圖2(a)所示,利用經(jīng)典的二階系統(tǒng)等效模型可得敏感結(jié)構(gòu)部分的傳輸函數(shù)為

式中:x為質(zhì)量塊位移;ω0,為固有角諧振頻率;,為品質(zhì)因數(shù).
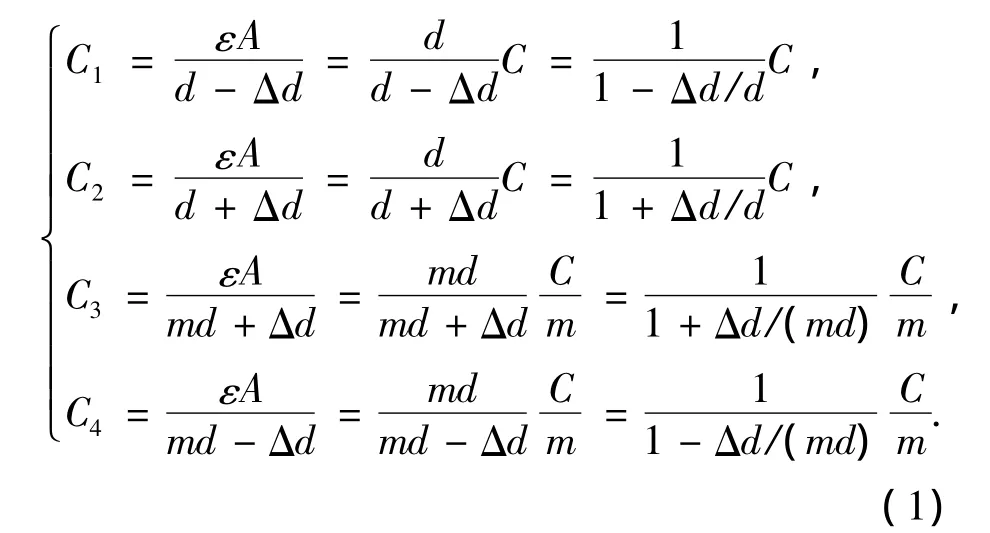
為對(duì)系統(tǒng)工作原理進(jìn)行分析,將微結(jié)構(gòu)等效為四個(gè)電容,如圖2(b)所示,電容C1和C2極板間距為d,C3和C4極板間距為md(m為常系數(shù)).在非公共端的兩個(gè)電極上,分別施加電壓V+,V-.當(dāng)有加速度a輸入時(shí),由于加速度作用,質(zhì)量塊將偏離平衡位置,假設(shè)它向C1方向移動(dòng)了Δd的位移,則4個(gè)電容都將隨活動(dòng)電極與兩個(gè)固定電極之間距離的變化而變化[7].
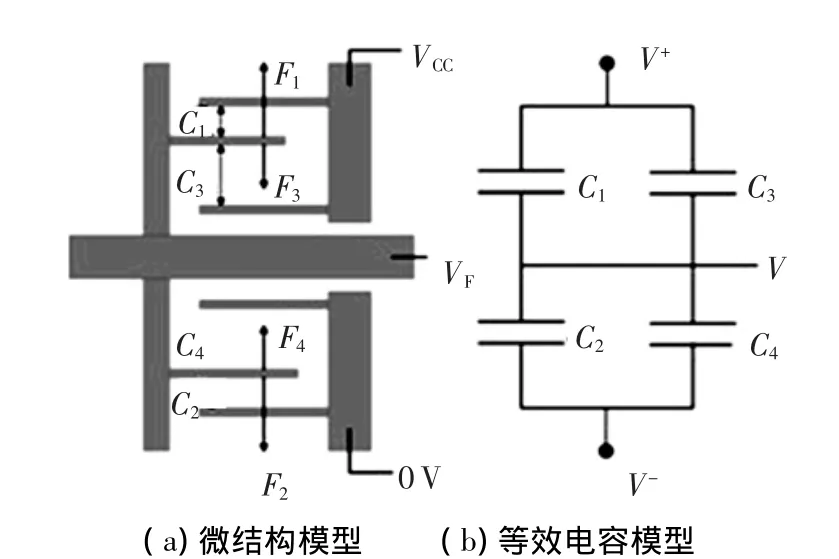
圖2 傳感器微結(jié)構(gòu)及等效電容模型
調(diào)制信號(hào)V+,V-分別為

由式(1)和式(2)和可以得出

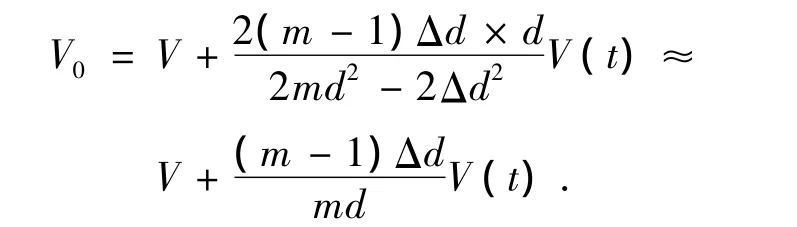
其中V為低頻信號(hào),由于解調(diào)后不會(huì)輸出,這里未作詳細(xì)介紹.由于Δd比d要小兩到三個(gè)數(shù)量級(jí),則Δd2要比md2小四個(gè)數(shù)量級(jí).它對(duì)靈敏度的影響不大,只會(huì)影響到傳感器輸出電壓的非線性.
因此,只考慮傳感器靈敏度時(shí),上式可以近似為
2.2 力平衡反饋
力反饋過(guò)程的示意圖如圖2(a)所示.固定上極板接電源電壓VCC,下極板接零電位,VF為反饋電壓,也是傳感器的輸出電壓V0.由于梳齒的非均勻分布,兩側(cè)的固定梳齒對(duì)中間活動(dòng)梳齒共有四個(gè)力的作用,即圖中所示F1,F(xiàn)2,F(xiàn)3,F(xiàn)4.
根據(jù)平行板間靜電力的計(jì)算,極板間產(chǎn)生的靜電力F為
其中:C為電容;V為極板間所加的電壓;d為極板間距離.隨著反饋電壓VF的變化,極板間電壓V將發(fā)生變化,這4個(gè)靜電力的大小也都隨之變化.建立相應(yīng)模型,可以得到它們的合力為
通過(guò)“老年人生活質(zhì)量評(píng)定表”從身體健康、心理健康、社會(huì)適應(yīng)和環(huán)境適應(yīng)4個(gè)方面來(lái)獲取老年人生活質(zhì)量狀況。

2.3 系統(tǒng)模型
對(duì)于連續(xù)時(shí)間系統(tǒng),輸出信號(hào)和反饋信號(hào)都加在可動(dòng)極板上,要通過(guò)頻域加以區(qū)分.加在結(jié)構(gòu)的固定極板的差動(dòng)載波信號(hào)將變換信號(hào)調(diào)制到高頻,這樣可以很好的減小低頻噪聲.輸出的信號(hào)經(jīng)過(guò)前級(jí)放大,同步解調(diào)之后,低通濾波器將高頻成分過(guò)濾掉,得到與輸入加速度成比例的電壓信號(hào).
由上述分析建立系統(tǒng)仿真模型如圖3所示[8-9],模型中的處理電路模塊包括調(diào)制解調(diào)器以及二階低通濾波器.引入PID控制器用來(lái)對(duì)系統(tǒng)進(jìn)行補(bǔ)償,經(jīng)典的PID控制器傳輸函數(shù)G(s)由三條并行通路組成,按偏差的比例(Proportional)、積分(Integral)、微分(Derivative)控制,簡(jiǎn)稱(chēng)PID控制.PID控制廣泛應(yīng)用于過(guò)程控制中,其控制參數(shù)分別為KP,KI和KD[10]關(guān)系不式如下:

設(shè)反饋增益為KF,低通濾波器的傳輸函數(shù)為HF(s).由此,根據(jù)圖3所示模型,可以寫(xiě)出系統(tǒng)的開(kāi)環(huán)傳輸函數(shù)為

式中:KP0為系統(tǒng)增益常數(shù).
閉環(huán)傳輸函數(shù)可寫(xiě)為
式中:a1和a2為二階低通濾波器的系數(shù).
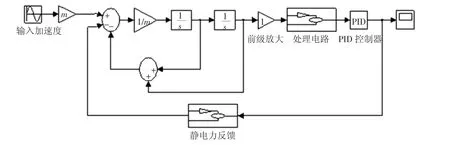
圖3 閉環(huán)系統(tǒng)仿真模型
與開(kāi)環(huán)傳輸函數(shù)相比,閉環(huán)增益減小到開(kāi)環(huán)增益的1/(1+HOL(s)KF),所以在相同加速度的作用下,敏感質(zhì)量的位移也相應(yīng)減小,這樣就提高了系統(tǒng)的線性度和分辨率.由閉環(huán)系統(tǒng)的傳輸函數(shù)可以看出,敏感結(jié)構(gòu)的參數(shù)(彈性系數(shù)k和阻尼b)越小,PID控制器對(duì)系統(tǒng)的控制作用越強(qiáng),所以高性能的閉環(huán)加速度傳感器要求敏感結(jié)構(gòu)具有較小的彈性系數(shù)和阻尼系數(shù).
3 仿真分析
3.1 系統(tǒng)正弦響應(yīng)分析
PID控制器增大了系統(tǒng)反饋,使系統(tǒng)的增益稍小,但是積分器對(duì)系統(tǒng)的相位補(bǔ)償作用顯著,大大減小了系統(tǒng)的延遲.
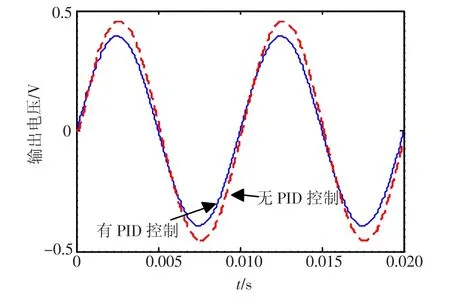
圖4 系統(tǒng)輸出響應(yīng)對(duì)比
3.2 系統(tǒng)階躍響應(yīng)分析
由自動(dòng)控制理論可以知道[11],PID控制器可以改善系統(tǒng)的阻尼,調(diào)節(jié)系統(tǒng)的上升時(shí)間和調(diào)節(jié)時(shí)間.KP=5,KI=0.05,KD=0.002 5時(shí)的系統(tǒng)階躍響應(yīng)曲線如圖5所示,圖中同時(shí)給出了無(wú)PID控制器時(shí)系統(tǒng)階躍響應(yīng),輸入信號(hào)階躍時(shí)間在0.000 5 s,階躍值為1 g.可以看到PID控制器對(duì)系統(tǒng)階躍響應(yīng)的控制作用,大大減小了系統(tǒng)的響應(yīng)時(shí)間和調(diào)節(jié)時(shí)間.
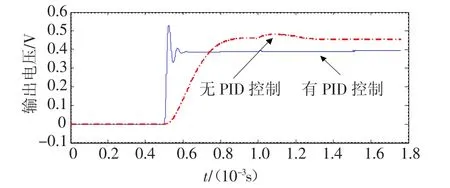
圖5 系統(tǒng)階躍響應(yīng)對(duì)比
4 實(shí)驗(yàn)結(jié)果
設(shè)計(jì)得到的加速度傳感器結(jié)構(gòu)由于工藝偏差等原因,是一個(gè)欠阻尼器件.通過(guò)PCB板連接帶有PID控制模塊的接口電路進(jìn)行了階躍響應(yīng)測(cè)試.圖6(a)是PID調(diào)整之前的系統(tǒng)階躍響應(yīng)測(cè)試結(jié)果,可以看出系統(tǒng)是一個(gè)欠阻尼系統(tǒng),階躍響應(yīng)出現(xiàn)了不希望得到的震蕩.
通過(guò)調(diào)整接口電路的PID模塊參數(shù),將系統(tǒng)調(diào)節(jié)到了臨界阻尼狀態(tài),消除了震蕩并且保證系統(tǒng)具有最快的響應(yīng)速度,大大提高了系統(tǒng)性能.圖6(b)是經(jīng)過(guò)PID調(diào)整后的階躍響應(yīng)測(cè)試結(jié)果.
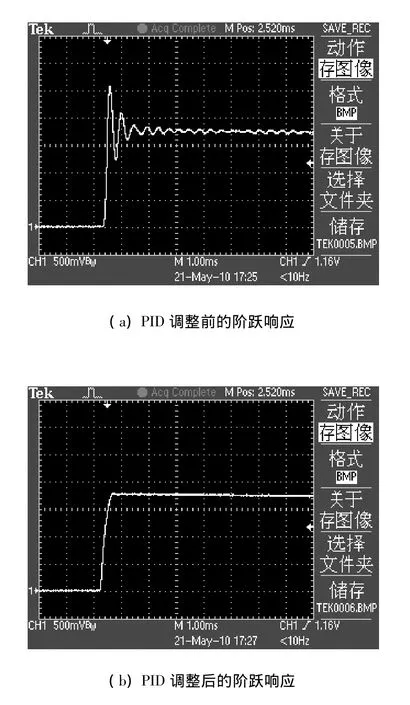
圖6 階躍響應(yīng)實(shí)驗(yàn)波形
5 結(jié)論
本文設(shè)計(jì)了一種基于梳齒電容式微加速度計(jì)結(jié)構(gòu)的閉環(huán)控制系統(tǒng),分析了傳感器的等效電容模型及其力反饋模型,在控制系統(tǒng)中引入了PID控制器,并建立了系統(tǒng)的開(kāi)環(huán)和閉環(huán)傳輸函數(shù).利用SIMULINK模型對(duì)系統(tǒng)進(jìn)行仿真,分析了PID控制器對(duì)相位的補(bǔ)償作用和對(duì)系統(tǒng)階躍響應(yīng)的控制作用.實(shí)驗(yàn)結(jié)果表明PID控制器的引入可以大大提高傳感器系統(tǒng)的性能.
[1]陳渝,郁發(fā)新,王慧泉,等.電容式力平衡加速度計(jì)的設(shè)計(jì)[J].傳感技術(shù)學(xué)報(bào),2006,19(2):411-412.
[2]YAZDI N,NAJAFI K.An all-silicon single-wafer microg accelerometer with a combined surface and bulk micromachining process[J].Journal of micro electromechanical systems,2000,9(4):544-550.
[3]BOSER B E,HOWE R T.Surface micro-machined accelerometers[J].Journal of solid-state circuits,1996,31(3):366-373.
[4]LEE I,YOON G H.Development and analysis of the vertical capacitive accelerometer[J].Sensors and actuators A,2005,119:8-18.
[5]KRAFT M,LEWIS C P.Design of a hybrid closed loop control system for a MEMS accelerometer using backstepping principle[C]//Microelectronics,2007.ICM 2007.International Conference.London:[s.n.],2007:213-216.
[6]KRAFT M,LEWIS C P,HESKETH T G.Closed-loop silicon Accelerometers[J].IEEE Proceeding Circuits,Devices and System,1998,146(5):325.
[7]陳偉平,趙振剛.力平衡框架結(jié)構(gòu)加速度計(jì)的設(shè)計(jì)[J].傳感技術(shù)學(xué)報(bào),2006,19(5):2193-2195.
[8]PARK K M.Methodologies for MEMS device performance and damage monitoring[D].Hoboken:Stevens institute of technology,2002.
[9]AALTONEN L,PAHIKKALA P.Continuous time interface for±1.5 g closed-loop accelerometer[C]//Integrated circuit design and technology.2007.ICICDT’07 IEEE International Conference.Austin,TX:[s.n.],2007:1-4.
[10]FRANKLIN G F,POWELL J D.Abbas Emami-Naeini.Feedback control of dynamic systems[M].4th ed.朱齊丹,張麗珂,譯.北京:電子工業(yè)出版社,2004.
[11]KUO B C,GLONARAGHI F.Automatic control systems[M].汪小帆,李翔,譯.北京:高等教育出版社,2004.
猜你喜歡
童話(huà)王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
