基于CAN總線的自動刨煤機組監控網絡動態調度研究
2010-03-19 12:27:06郝剛
電氣技術 2010年7期
關鍵詞:信息
郝 剛
(煤炭科學研究總院沈陽研究院,沈陽 113001)
1 引言
CAN(Controller Area Network)總線因其低成本、抗干擾等優點已廣泛應用于工業自動化領域,國內2005年開始將CAN應用于刨煤機組監控網絡,當前采用的固定優先級調度機制存在傳輸不可預知、低優先級信息易死鎖等不足,為了保證信息實時性,CAN實時系統中總線利用率只能達到30%左右。隨著CAN應用的不斷加深及刨煤機組分布式實時系統中相互連接器件的日漸增多,系統要交換的數據逐步增加,現有的帶寬資源越顯有限。動態優先級實時調度策略如LLF、EDF(Earliest Deadline First),相比靜態調度具有較高的資源利用率,保證時間最緊迫的任務贏得資源,可提高低優先級信息網絡競爭能力,使得網絡實時信息有較好的時間響應特性[1]。目前,基于CAN的動態調度已成為應用研究中的熱點[1-6]。
在CAN總線中實施基于信息時間約束的動態優先級調度面臨以下困難:①總線消息時間約束差別較大,且隨著時間越來越大,需要越來越多的CAN標識符位來編碼信息的截止期,難以用有限的標識符實現;②需要網絡中節點之間有嚴格的時間同步機制。為解決以上問題,文獻[2,3]采用主節點調度形式來實現動態調度。文獻[5,6]提出的EDF調度,在保證時間同步的基礎上,將時間分為若干的小段時間域,根據消息截止期所落的域不同來決定優先級,每隔一段時間(如文獻[5]中1ms)更新消息優先級。
本文以信息的松弛時間(除去自身傳輸用時之外距離信息截止期限的時間)為參數,通過將信息的松弛量化為可傳輸幀數,用有限的CAN幀標識符位實現信息的時間約束編碼,信息參與總線仲裁時更新其松弛優先級,充分利用了CAN總線固有的仲裁機制。
2 CAN及LLF調度算法
2.1 LLF調度中CAN信息優先級規劃
CAN有兩種不同的幀格式,分別為含有11位標識符的標準幀和含有29位標識符的擴展幀,本文采用擴展幀格式。
記信息m的優先級為PmR,各個信號的優先級由控制優先級Pm-C、松弛優先級Pm-S和截止期單調(DM)優先級Pm-DM共同決定,如圖1所示。

圖1 LLF調度中優先級規劃
CAN總線采用“線與”邏輯來仲裁信息競爭,所以信息標識符越小則優先級越高,總線仲裁從幀起始位開始逐位向后對比進行仲裁。控制優先級為0、松弛優先級越小的信息優先級越高,松弛優先級相同時則根據DM固定優先級仲裁。
LLF調度的核心是動態更新松弛優先級,為實現動態優先級調度,將信息優先級規劃分4個步驟:
(1)考慮松弛優先級的動態提升,在29位標識符中除Pm-C位之外的28位中,將前WS位規劃為松弛優先級域,松弛優先級用來動態記錄信息的剩余松弛,到達其截止期前還可以經歷多少次仲裁;將WDM位規劃為DM優先級域,DM優先級按信息截止期分配,截止期越小優先級越高,各信息具有總線上唯一的DM優先級。DM優先級屬于固定優先級,用于接收濾波以及當兩信息松弛優先級相同時予以區分。仲裁域結構規劃如圖2所示。
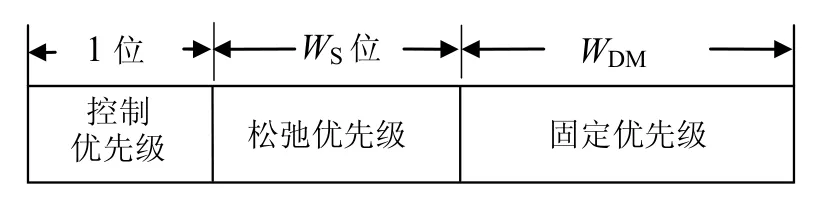
圖2 LLF調度中CAN幀仲裁域結構
(2)確定用于將信息松弛量化為剩余仲裁數的量化幀的大小。考慮位填充及傳輸過程中附加的3位幀間空間,其大小應滿足公式(1)[7]。

q為量化幀的大小,tCm為系統所有信息的總線最長傳輸用時,fbaud為波特率,dm為擴展信息幀數據域的字節數。
(3)確定松弛優先級域的位數WS和DM優先級域的位數WDM。

其中,Q為所調度信息的個數。
(4)初始化優先級域
當松弛優先級位數能夠滿足信息松弛編碼要求時,置控制優先級Pm-C=0,否則Pm-C=1,通過將控制優先級置1將不能編碼的消息掛起,隨著信息的松弛不斷減少,當滿足編碼要求時,再置Pm-C=0,即

其中,tDm為信息m的相對截止期,即當前時刻到信息截止期之間的時間,tJm為軟件的抖動時間。
2.2 基于事件觸發的LLF動態調度算法
LLF算法思想在于為每個信號引入隨總線仲裁動態更新其松弛優先級概念,每次信息競爭總線失掉仲裁,松弛優先級會動態提升,本文定義每次提升步長為1,基于事件觸發的LLF算法步驟如下:
(1)選擇波特率。
(2)信息產生,初始化信息優先級Pm。
(3)Pm=concat( Pm-C,Pm-S,Pm-DM)。
(4)監聽總線,總線空閑則申請發送。
(5)if 贏得總線仲裁。
開始傳輸數據,完成后返回第二步;
else if Pm-DM>1
Pm-DM=Pm-DM-1,返回第三步。
(6)結束。
2.3 LLF調度算法的可調度性分析
根據上述算法原理進行信息傳輸的可調度性分析。當所有信息同時競爭總線是總線的最壞傳輸條件,信息m在最壞傳輸條件下的傳輸時間稱為最糟糕響應時間tRm。信息m的傳輸時間特性滿足式(6)、(7),則該信息可調度

U為總線利用率,Ti為信息的傳輸周期(隨機信息為最小時間間隔),tWm為信息m從申請發送到獲得總線使用權所等待的時間,TDm為信息m的截止期,τbit為總線傳輸一位數據占用時間。
3 實例分析
3.1 自動刨煤機組監控系統
自動刨煤機組監控系統由刨煤系統、輸送系統、破碎系統、支護系統、冷卻與除塵系統、中央控制室、控制系統、視頻監控系統、和設備列車組成,各子系統之間通過CAN總線連接組建網絡。
本文以機組監控系統中33個實時信號a1~a33為調度對象,每個信號攜帶2個字節控制數據,a1~a5、a6~a30、a31~a33周期分別為100ms、200ms、300ms 100ms,為了滿足實時性要求,網絡信息的傳輸截止期限應不大于信息周期,取刨煤機組CAN網絡位速率為125kbps。
為了體現采用固定優先級調度時,新產生的高優先級信息(松弛較大)將阻礙排隊等待的低優先級信息(臨近其截止期、松弛很小)的情況,本文做以下假設:a1~a5、a8~a22、a31~a33由t=0開始周期發送,a6~a7、a23~a30在t=70m s時開始發送。
3.2 調度算法在刨煤機組監控系統中的應用
采用DM固定優先級調度方案和本文提出的LLF動態優先級調度方案對33個信息一個周期循環600ms共111個信息進行調度設計。
(1)基于DM算法的信息調度設計
傳統設計通常采用DM截止期單調算法對CAN傳輸信息進行優先級分配P,任務以信息的截止期大小排序被賦予不同的固定優先級。截止期越小的任務獲得的優先級越高。采用DM調度方法的優先級規劃結果如表1所示。

表1 自動刨煤機組信息集DM及LLF調度設計
(2)基于LLF算法的信息調度設計
考慮現場因素取軟件抖動tJm=1ms,fbaud=125kb/s,則q=0.76ms,WDM=6位,WS=22位,信息松弛初始值為

需要松弛優先級位數為8位,則可實現信息松弛編碼,即Pm-C=0,LLF調度中優先級規劃結果如表1所示。
3.3 刨煤機組監控系統的網絡性能分析
為了對網絡的可調度性、資源效率進行分析,本文采用以下總線特性參數:
(1)信息組丟失死限信息個數。
(2)總線利用率。
在總線信息參數不變的情況下,通過調節波特率來模擬總線利用率的變化,編程分別對DM、LLF算法進行仿真,得到兩種算法調度下的CAN總線網絡性能分析結果如圖3所示。
由仿真知,DM調度下丟失死限的信息均為低優先級信息。由圖3可見,同樣的負載條件下LLF調度丟失死限的信息個數明顯少于DM調度,LLF算法總線利用率比DM提高了24%。

圖3 刨煤機組信息集DM與LLF調度結果
4 結論
本文提出了基于事件觸發的LLF調度策略,不需要各節點附加的的時間同步機制,充分利用了CAN協議的非破壞性仲裁機制。對自動刨煤機組控制信息調度結果表明:LLF算法可達到較高的總線利用率,有效解決了低優先級信息的死鎖問題,兼顧了低優先級信息的公平性。
[1] Giorgio C Buttazzo, “Rate monotonic vs EDF:judgment day,” Real-Time Systems, 2005,29(1):5-26.
[2] Margull U, Diederichs C, Margull U, et al, “An application based EDF scheduler for osek/vdx,”Proceedings of the conference on Design, automation and test in Europe, Munich, Germany, 2008:1045-1050.
[3] Pedreiras P, A lmeida L, “EDF message scheduling on controller area network,” Computing & Control Engineering Journal, 2002,13(4):163-170.
[4] Fuster S, Rodríguez F, Bonastre A, “Software based EDF Message Scheduling on CAN Networks,”Proceedings of the Second International Conference on Embedded Software and Systems, Washington DC,USA, 2005:450-455.
[5] K. M. Zuberi, K. G. Shin, “Non-preemptive scheduling of messages on controller area network for real-time control applications,” in proc.Real-Time Technology and Applications Symposium,1995:240-249.
[6] Natale M D. Scheduling the CAN bus with earliest deadline techniques. Proc of the 21st IEEE Real time System s Sym posium, Orlando, 2000: 259-268.
[7] Tindell K, Burns A, Wellings AJ, “Calculating controller area network (can) message response times,”Control Engineering Practice, 1995,3(8):1163-1169.
[8] 16 bit Single-Chip Micro cont rollers-C167CR User’s manual, V3.3. Siemens AG, Munich, 2005.
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會展(2014年4期)2014-11-27 07:46:46
大眾創業(2009年10期)2009-10-08 04:52:00
數字社區&智能家居(2009年7期)2009-09-29 08:16:48
數字社區&智能家居(2009年11期)2009-06-25 04:30:34
數字社區&智能家居(2009年3期)2009-04-21 03:09:04
數字社區&智能家居(2009年2期)2009-03-27 04:33:44
數字社區&智能家居(2009年12期)2009-02-03 07:50:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
