水電站平面控制網網點穩定性分析及位移修正
2010-03-13 07:58:16沈靜付青萍
大壩與安全 2010年6期
沈靜,付青萍
(1.國家電力監管委員會大壩安全監察中心,浙江杭州310014;2.江西柘林水電開發有限責任公司,江西九江332000)
1 工程概況
某電站是一座以發電為主,兼有防洪、灌溉、航運、養殖等綜合效益的大(1)型水利水電工程。水庫總庫容79.2億m3,為多年調節水庫。工程由主壩、Ⅰ~Ⅲ副壩、第一溢洪道、第二溢洪道、泄空洞、發電引水系統和廠房、灌溉取水及通航建筑物等組成。主壩等主要擋水建筑物為1級建筑物。
主壩為粘土及混凝土防滲心墻土石壩,防浪墻頂高程為75.2 m,最大壩高63.5 m,壩頂長度590.75 m。Ⅰ副壩為均質土壩,Ⅱ副壩為粘土心墻壩,Ⅲ副壩為粘土及混凝土防滲心墻均質土壩。第一溢洪道位于主壩右岸,為3孔陡槽式溢洪道;第二溢洪道位于Ⅰ副壩左端,為7孔開敞式溢洪道。發電進水閘和接頭混凝土重力壩緊靠主壩左端。
2 平面變形測量布置
2.1 平面控制網
2002年利用擴建工程監測控制網的部分控制點作基準點,重建主壩區變形監測平面控制網。
重建的平面控制網由13個基準點組成,網點編號分別為L1-1、3-2、3-3、3-7、3-10、SA1-2、2-1、2-2、2-3、2-4、2-5、2-6、2-7。平面控制網測區南北長約1500 m,東西寬約600 m,平面布置見圖1。平面控制網主要對主壩水平位移、擴建工程的邊坡變形、F7斷層水平位移、溢洪道水平位移的工作基點進行校測。平面控制網建成后在2003年首次觀測,2004年、2005年、2008年進行了復測。
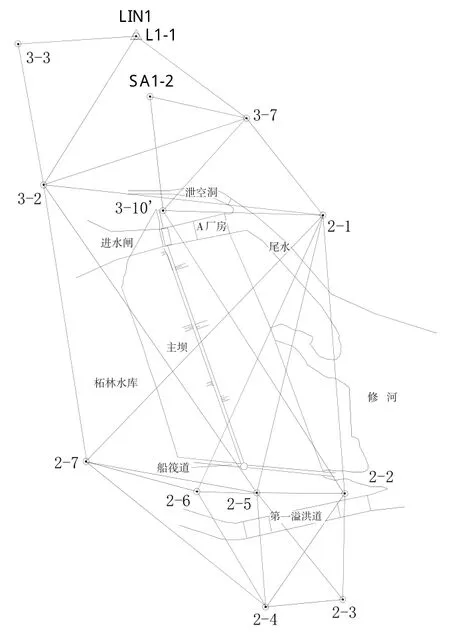
圖1 平面控制網網點布置圖Fig.1 Distribution of the dots in plane control network
2.2 水平位移測點
大壩安全監測系統涉及的工程部位主要有:主壩、Ⅰ副壩、Ⅲ副壩、第一溢洪道、第二溢洪道、F7斷層、進水閘、“80山包”、廠區邊坡和B廠引渠與進水口邊坡、B廠引水發電系統等。
主壩水平位移監測共有8條測線,共33個測點。進水閘重力壩壩頂及進水閘下游防浪墻頂布設的水平位移測點分別為5個、2個。
擴建工程B廠的廠房后坡、“80山包”、引渠及進水口部位布置有39個、第一溢洪道閘墩頂部布置有8個、F7斷層所在的山坡上布置有7個、Ⅰ副壩布置有19個、第二溢洪道布置有14個、Ⅲ副壩布置有9個水平位移變形測點。
2.3 觀測方法
平面控制網和水平位移觀測均采用徠卡TCA2003全站儀。
平面控制網按全邊角網一等進行觀測,水平角觀測采用全圓觀測法測12測回。
水平位移以控制網點為工作基點,采用邊角交會法、極坐標法觀測。
3 平面控制網分析
2003年首次觀測后,2004年、2005年、2008年對平面控制網進行了三次復測,對比四次測量中的邊長,成果見表1。從表中可以看到,2004年和2005年的大部分邊長比2003年的長,且數值較大,表明和2003年相比,相當于整個網形有了一定的放大。其中2004年和2005年兩年所用的邊長改正常數是取自同一份檢定結果,2003年和2008年兩年所用的邊長改正常數是各取獨立的檢定結果,目前已無法考證當時儀器常數的正確性。但從2008年的邊長觀測值來看,與2003年相近,其差值有大有小,大部分是誤差所至,因此有理由懷疑2004年和2005年兩年的邊長數據存在系統誤差。
2004年和2005年的平差結果表明,各點的位移和距離起始點的遠近有關,離起始點L1-1較遠的一些點,位移達到20 mm,明顯是由于邊長數據存在系統誤差而使網形放大造成的。
由以上分析,對2003年和2008年兩期觀測數據進行穩定分析計算,計算表明2-3、2-4、2-6、2-7、3-7、SA1-2能夠確認是穩定點,另外,除2-5相對有少許變動外,其余各點均不能排除不穩定的可能,也無法確認是穩定點。利用穩定點對2008年觀測數據進行平差,結果表明2-5的位移小于4 mm。
4 水平位移觀測修正
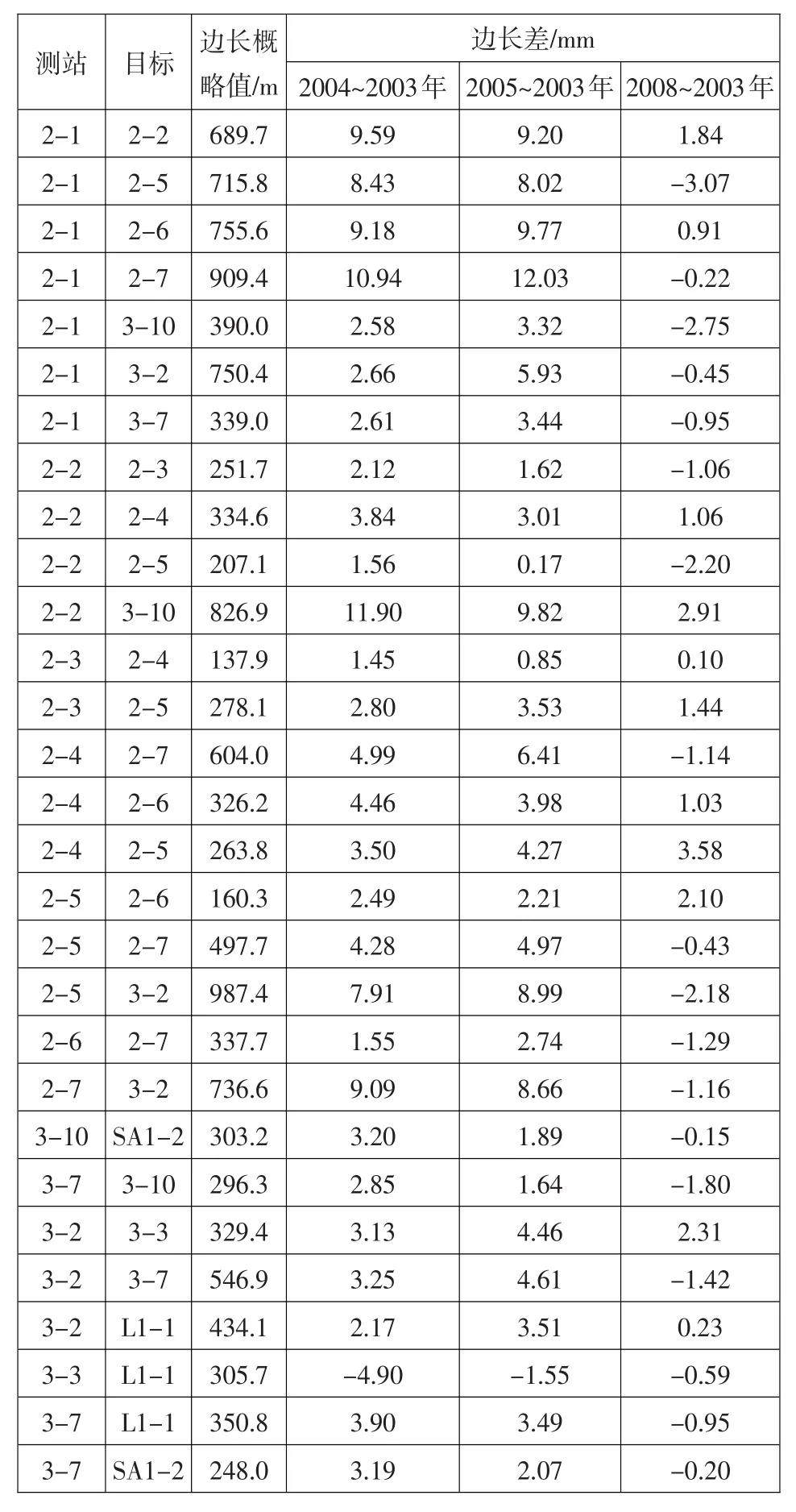
表1 平面控制網復測邊長成果比較Table 1:Side length in remeasurement by plane network
主壩壩體、擴建工程、F7斷層、第一溢洪道采用邊角交會法及極坐標法進行觀測的水平位移從2003年開始施測至今。2004~2007年的水平位移存在不同程度的突變,不符合各建筑物的位移變化規律。其原因是平面控制網復測后采用了新的成果,另外,對邊長改正采用的常數為2004年檢定結果,邊長改正常數的異常影響到了最終的位移結果。
2008年的復測表明,大多數控制網點穩定或位移較小,因此對2003年以后所有采用交會法得到的水平位移觀測成果利用2003年平差得到的基準點成果重新計算。
測點本身采用邊角交會法或極坐標法觀測,所以也存在著邊長放大的系統誤差,因此對邊長常數也進行了修正,重新進行邊長計算。
修正前、后的典型測點測值過程線見圖2、圖3。
對比修正前、后的測值過程線可見:修正前測值過程線不平順,呈現船形,且2004~2007年間測值明顯存在異常突變。修正后,典型測值過程線整體平順,無異常突變,與土壩運行多年來的變形規律較符合。

圖2 典型測點未修正過程線Fig.2 Graph without correction of typical monitoring points
圖3 典型測點修正后過程線Fig.3 Corrected graph of typical monitoring points
5 邊角交會的精度分析
邊角交會可以看作是從兩個工作基點分別進行極坐標法觀測,用極坐標法分別計算位移點的坐標,再計算兩套坐標的差,坐標差中一部分是觀測誤差引起的,還有一部分是兩工作基點坐標的相對誤差引起的。
用各期每一位移點觀測的兩條觀測邊長和兩個觀測角之和通過余弦公式計算工作基點間的邊長,再用工作基點坐標值計算基點間的邊長,兩者的差也可以衡量觀測精度。同樣,差中一部分是觀測誤差引起的,還有一部分是兩工作基點坐標的相對誤差引起的。
坐標差和基線差較大,但差值變化不大時,可能是工作基點已發生變化,需及時進行校核或復測。當坐標差和基線差有小有大時,說明差值異常的那組邊角交會觀測值有粗差存在,應及時進行重測。
2-5和2-1組成的工作基點組對12個點進行邊角交會,統計了從2003年1月15日~2008年10月3日該組交會的25期成果,共297個單點次閉合差,繪制了兩個坐標差和基線差的分布圖,見圖4。
從分布圖中可以看到,差值分布寬度較大,觀測精度還有待提高;差值的均值在0附近,說明工作基點間的關系較好。
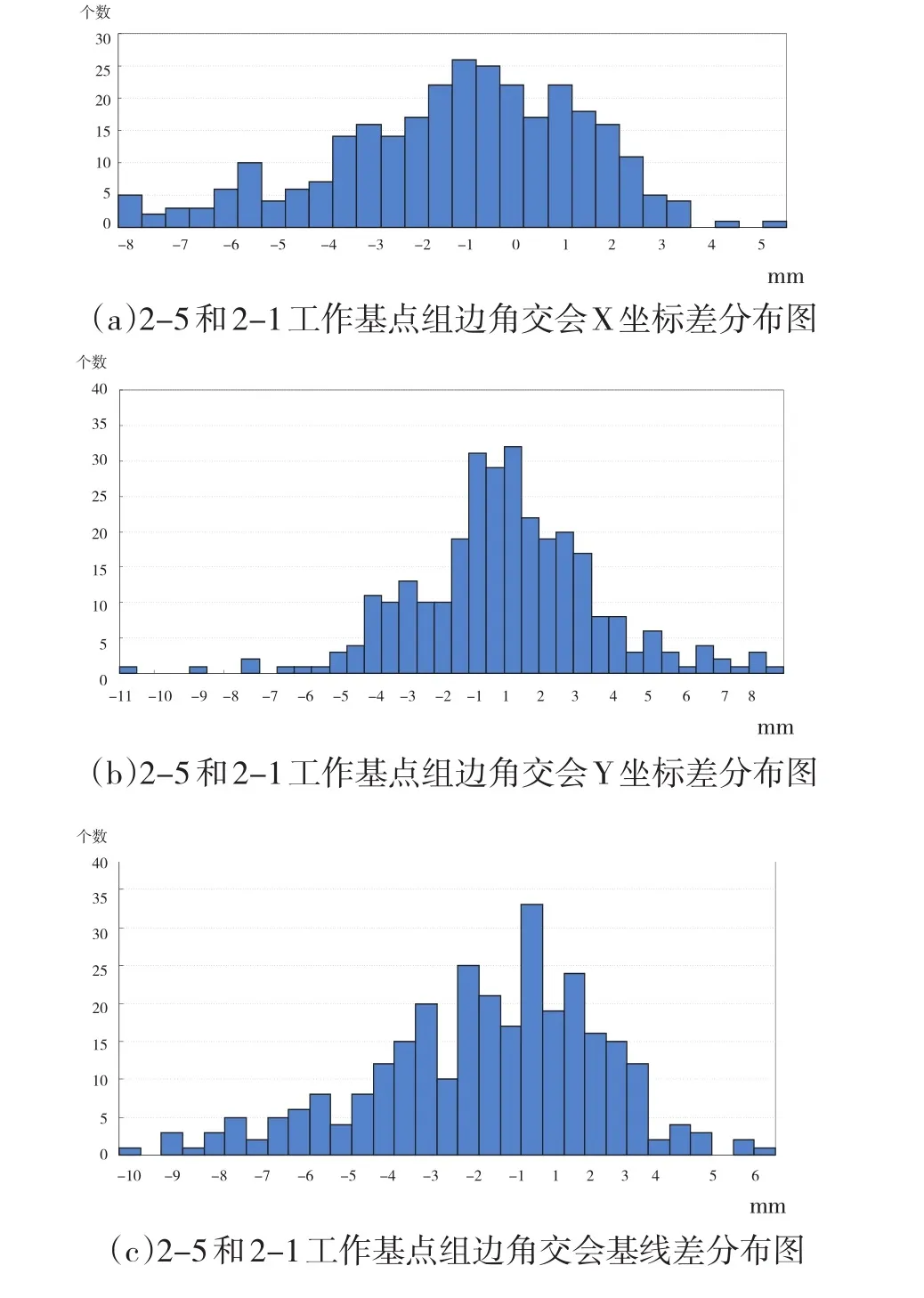
圖4 2-5和2-1工作基點組邊角交會法坐標差及基線差分布圖Fig.4 Distribution of coordinate difference and baseline differ?ence in linear-angular intersection of the 2-5 and 2-1 work?ing basing points set
6 結語
(1)從多個水電站的控制網復測情況來看,目前檢定得到的邊長改正數常有錯誤,因此建議在檢定前后均在控制網上測一條邊,這樣可以及時發現常數的異常。
(2)控制網復測后,應進行穩定分析,不要急于采用新的工作基點坐標。
(3)邊角交會應計算閉合差,及時發現觀測值中含有的粗差和工作基點間的變動。■