光纖光柵車輛稱重測速關(guān)鍵裝置設(shè)計與試驗
2010-03-07 04:55:12張懷玉夏吉慶孟令權(quán)
東北農(nóng)業(yè)大學(xué)學(xué)報 2010年12期
張懷玉,夏吉慶*,孟令權(quán)
(1.東北農(nóng)業(yè)大學(xué)工程學(xué)院,哈爾濱 150030;2.黑龍江省計算中心,哈爾濱 150036)
車輛動態(tài)稱重,即在非停車的運(yùn)動狀態(tài)下的稱重。動態(tài)稱重與傳統(tǒng)的靜態(tài)稱重相比有許多優(yōu)點(diǎn),主要表現(xiàn)在節(jié)省時間、效率高、在稱重時不至于造成交通擁堵[1-2]。目前國外產(chǎn)品的單軸載稱重平均誤差從±5.0%~±30%不等,相應(yīng)置信度為90%或95%,最好的WIM(Weigh-in-Motion)系統(tǒng)單軸載稱重誤差可以控制在±5.0%以內(nèi)[3],但成本太昂貴僅適應(yīng)于低速場合。本設(shè)計是將光纖布拉格光柵傳感器埋入到復(fù)合材料中,制作成動態(tài)汽車秤,由于復(fù)合材料具有良好的耐腐蝕性,光纖光柵不需要單獨(dú)的封裝,使得整個結(jié)構(gòu)能夠應(yīng)用于一些惡劣的環(huán)境,不受電磁干擾并且可以在完全浸水的環(huán)境下工作而不用特殊的維護(hù),并且可以在車速較高的場合使用。本文旨在對復(fù)合材料秤體的研究進(jìn)行闡述,解決了光纖光柵易損壞的問題。
1 材料與方法
1.1 試驗材料
本車輛稱重測速裝置采用復(fù)合材料(由玻璃鋼預(yù)浸料和碳預(yù)浸料等復(fù)合構(gòu)成)制造,復(fù)合材料具有重量輕、剛度大,耐腐蝕的優(yōu)點(diǎn)。稱重傳感器則采用FBR(光纖布拉格光柵),在試驗時,把光纖Bragg光柵貼在秤體上,做成壓力傳感器,其工作原理是:光源發(fā)出的寬帶光經(jīng)光纖傳輸?shù)奖粶y量點(diǎn),光柵有選擇性地反射回一窄帶近紅外光[4-5],經(jīng)光分路器傳送到波長鑒別器或波長解調(diào)儀,然后通過光探測器進(jìn)行光電轉(zhuǎn)換。當(dāng)秤體受到外界壓力產(chǎn)生形變時,光柵反射的窄帶光中心波長會發(fā)生相應(yīng)的變化,從而反應(yīng)出秤體所受的相應(yīng)壓力[6-8]。FBR光纖光柵壓力傳感器具有靈敏度高、線性度好、結(jié)構(gòu)簡單、性能可靠、抗干擾性強(qiáng)等優(yōu)點(diǎn)[9-12]。
1.2 試驗方法
本試驗通過應(yīng)變反算載荷。為此把秤體簡化為簡支梁的形式,其一端采用固定鉸支約束,另一端采用可動鉸支約束。由于載荷的變化及傳感器位置的影響,整個梁上各截面的剪力和彎矩有時不能由一個函數(shù)描述,因此根據(jù)不同情況分別加以考慮。為了計算載荷大小首先粘貼兩個FBG傳感器,假設(shè)簡支梁長為l,以簡支梁的固定鉸支端為坐標(biāo)原點(diǎn),兩個傳感器距坐標(biāo)原點(diǎn)分別為x1和x2,其中(x1<x2),載荷F的加載位置為x。根據(jù)載荷的變化及傳感器鋪設(shè)位置,將分以下三種情況考慮。即①載荷F加載到兩個傳感器之間(x1<x<x2)、②載荷F加載到兩個傳感器左端(x<x1<x2)、③載荷F加載到兩個傳感器右端(x1<x2<x)。
下面重點(diǎn)介紹載荷F加載到兩個傳感器之間(x1<x<x2)的情況。
簡支梁結(jié)構(gòu)和載荷F的加載位置如圖1所示。
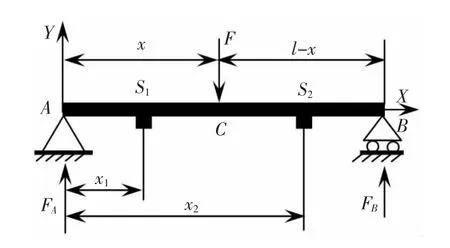
圖1 簡支梁結(jié)構(gòu)和加載位置Fig.1 Simple beam structure and loading positions
材料力學(xué)分析可知,當(dāng)載荷加載位置固定時(x為常量),應(yīng)變與載荷呈線性關(guān)系;當(dāng)載荷一定時(F為常量),加載位置x也與應(yīng)變測量點(diǎn)的應(yīng)變呈線性關(guān)系。這就是由傳感器應(yīng)變反算載荷的重要依據(jù)。
而在實際應(yīng)用中,承重結(jié)構(gòu)受到的力并不是集中力,而是小面積的均布力,當(dāng)這個小面積的均布力可以看作由n個集中力組成,如圖2所示(d為輪胎接地面的寬度,由于車型的不同、輪胎充氣量的不同(d值會存在一定的差異,d作為常量考慮,d=200 mm)。
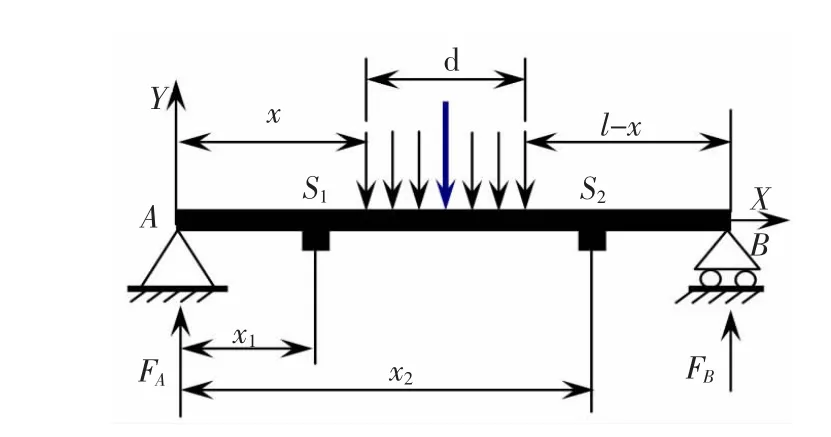
圖2 均布載荷向集中載荷的等效Fig.2 Uniform load equivalent to the concentrated load
在計算中需要將公式進(jìn)行修正,進(jìn)行修正并整理后得到如下三組實用公式:
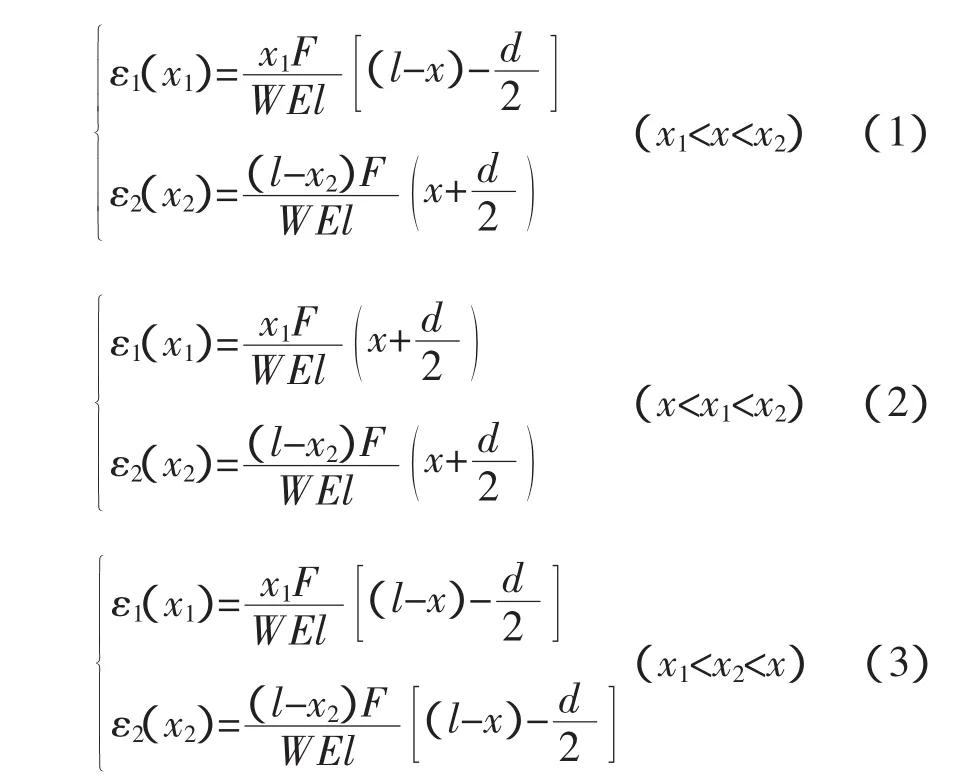
式中,W-抗彎截面系數(shù)(m3);
E-彈性模量(MPa)。
從公式(1)~(3)可以看出,梁結(jié)構(gòu)上加載的均布力與應(yīng)變是一個符合ε=(kx+b)F關(guān)系的線性函數(shù),當(dāng)確定加載位置后,只要獲得一個傳感器的應(yīng)變值就可以計算出所加載荷F;或者獲得兩個傳感器的應(yīng)變值就可以根據(jù)方程組分別計算出加載位置x及載荷大小F。這個線性函數(shù)中的斜率k,是一個與加載位置呈線性關(guān)系的函數(shù),通過一定的靜力試驗測量獲得的系統(tǒng)參數(shù)值會更真實,更實用。由于條件限制,研究只能在實驗室進(jìn)行秤體靜力模擬試驗,來獲得秤體的固有參數(shù)。
1.3 試驗安排
1.3.1 復(fù)合材料稱體的結(jié)構(gòu)設(shè)計與制造
結(jié)構(gòu)設(shè)計決定了稱體稱重精度和載荷識別能力。稱體的主承載結(jié)構(gòu)為梁結(jié)構(gòu),這個梁結(jié)構(gòu)一方面要具備足夠的承載能力,一方面在載荷作用下要有一定規(guī)模的變形以保證測量的精度。這樣,稱體的剛度與測量精度成為一對互相牽制的因素:剛度大則測量精度低。在設(shè)計的過程中需要找到一個切入點(diǎn)使結(jié)構(gòu)滿足剛度要求并且具有足夠的測量精度。綜合考慮這些因素,稱體的總體結(jié)構(gòu)見圖3。
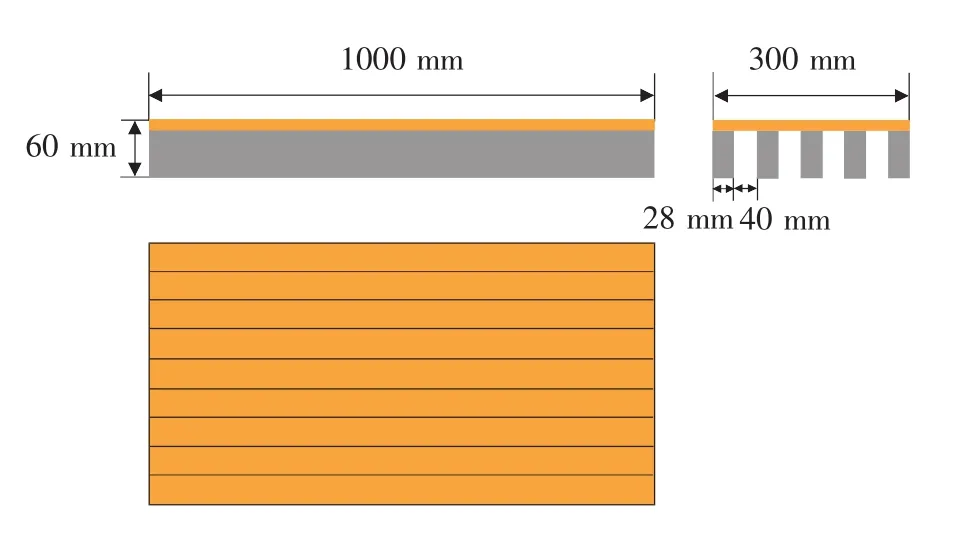
圖3 稱體的總體結(jié)構(gòu)Fig.3 Scale structures
稱體主要由面板和筋條組成,面板由玻璃纖維增強(qiáng)復(fù)合材料制造,筋條由碳纖維增強(qiáng)復(fù)合材料制造,其中有5根筋條,它們是主要承載的梁結(jié)構(gòu),當(dāng)在其中一根梁上布置傳感器時,可以測量整個加載于稱體面板之上的載荷。復(fù)合材料汽車稱實驗件見圖4。

圖4 復(fù)合材料汽車稱實驗件Fig.4 Experiments pieces of compositematerials scale
1.3.2 靜力試驗
復(fù)合材料秤體靜力實驗主要通過對秤體不同位置加載時,測量主梁上各個傳感器的應(yīng)變響應(yīng),判斷加載位置并換算出載荷。為了對秤體在加載過程中的變形情況進(jìn)行掌握,在秤體的主梁粘貼光纖布拉格光柵應(yīng)變片3個,秤體長度l取1000 mm,寬度取300 mm,S1、S2、S3分別粘貼在簡支梁的300、500、700 mm 處,依據(jù) ε=(kx+b)F 公式,分別對載荷作用的三種位置情況進(jìn)行仿真,依次加載0.5 t,直到載荷5 t為止。具體實驗步驟:
① 在 S2傳感器附近加載,即 ε2<ε1并且 ε2>ε3的情況(具體x=400mm),使用公式(1)計算;
② 在 S1傳感器附近加載,即 ε1>ε2>ε3的情況(具體x=200 mm),使用公式(2)計算;
③ 在 S3傳感器附近加載,即 ε3>ε2>ε1的情況(具體x=600 mm),使用公式(3)計算。
對所測得的應(yīng)變進(jìn)行記錄得到數(shù)據(jù)見表1。
對表1數(shù)據(jù)進(jìn)行線性擬合,得到下列三組方程:
在傳感器S1、S3之間加載方程:

在傳感器S2、S3左側(cè)加載方程:

在傳感器S1、S2右側(cè)加載方程:

把相應(yīng)載荷代入上述三組方程,驗證上述三組方程是否可行,得到如表2所示數(shù)據(jù)。
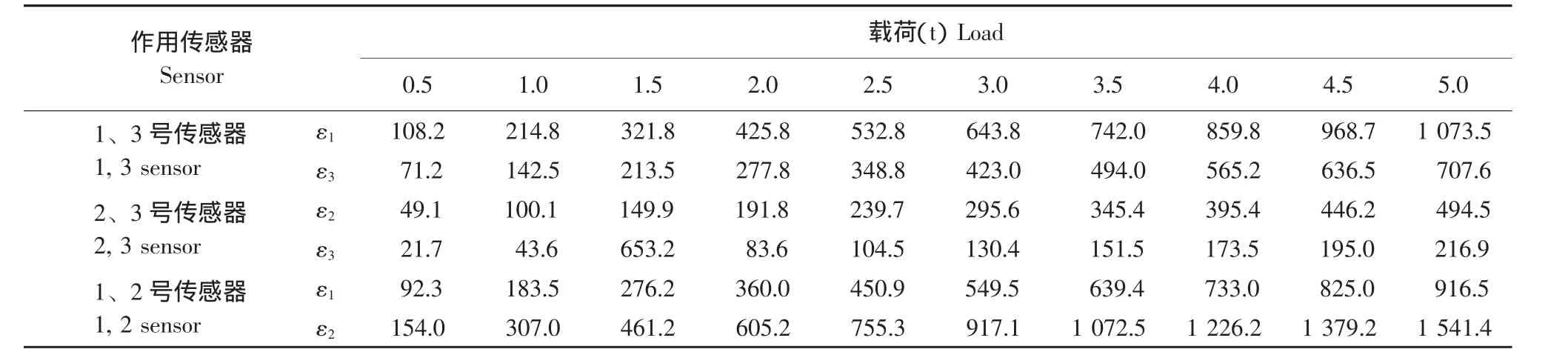
表1 載荷位置與傳感器應(yīng)變電壓ε對應(yīng)Table1 Load location and sensor strain ε correspondence (μV)
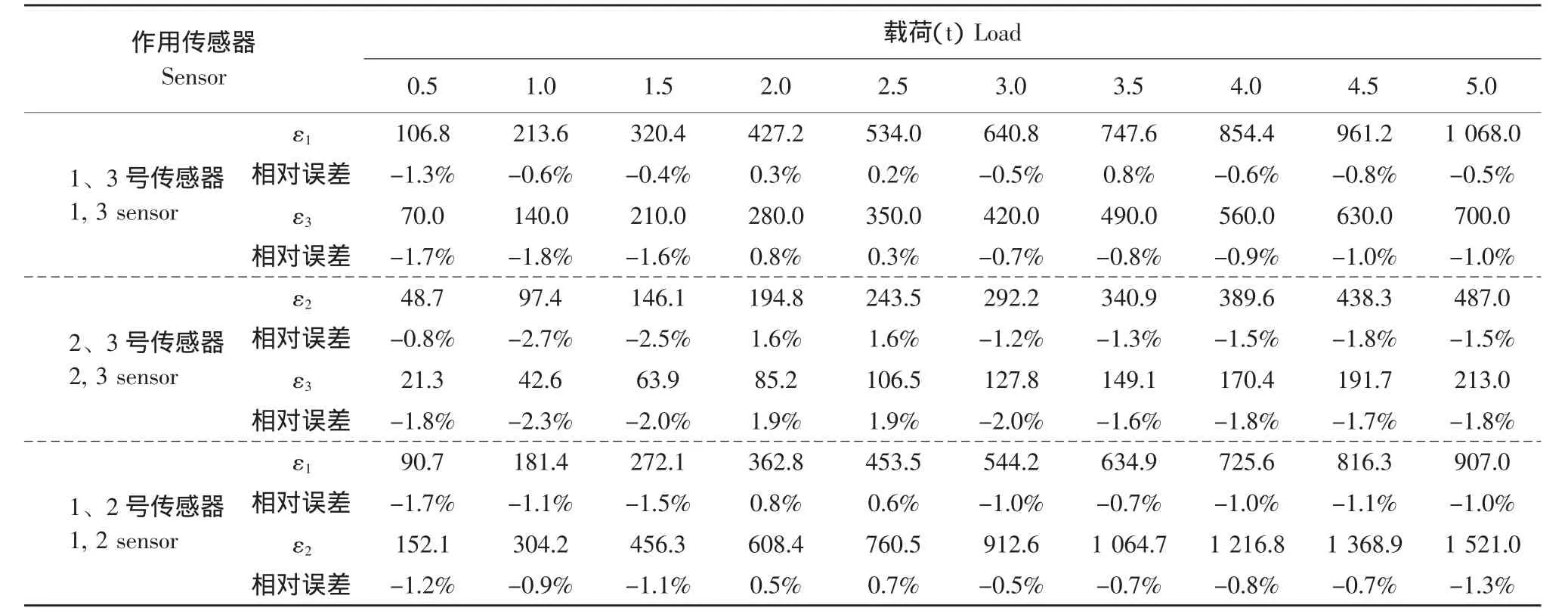
表2 由載荷與加載位置計算應(yīng)變電壓ε數(shù)據(jù)Table2 Calculated by the location of load and load strain ε data(μV)
1.3.3 復(fù)合材料秤體動態(tài)試驗
為了開展復(fù)合材料秤體的路面動態(tài)測試,采用圖5中所示的測試方案:①首先選擇一個具有硬化路面,長度至少500 m狀態(tài)良好的路段;②在實驗路段上,按照國家的相關(guān)標(biāo)準(zhǔn)施工,建立秤體的混凝土基礎(chǔ);③使用專用的檢衡車,通過向車內(nèi)添減標(biāo)準(zhǔn)砝碼,測試在不同速度下、不同載重下的秤體動態(tài)測重能力;④在秤體附近建立測試平臺,集中測試設(shè)備對秤體傳感器采集數(shù)據(jù)及光電測速數(shù)據(jù)進(jìn)行采集。
1.3.3.1 秤體的標(biāo)定和靜態(tài)測量
靜態(tài)測量是對秤體的標(biāo)定,標(biāo)定值作為標(biāo)準(zhǔn)值,便于動態(tài)測量值與其比較,計算動態(tài)測量誤差。在動態(tài)實驗開始實施之前,首先使用車載砝碼對秤體進(jìn)行簡單標(biāo)定,首先吊裝車輪狀的砝碼分別置于A、B秤體上,由于輪形砝碼本身形狀的限制,秤體上只能安放一個,由于秤體對同一位置載荷的線性度,可以通過安放一個砝碼使秤體產(chǎn)生的應(yīng)變來檢驗載荷解算公式。通過方形砝碼的累加來檢驗雙輪上稱時結(jié)構(gòu)的線性情況。施加方形砝碼首先加1 t,第二次加至3 t,第三次加至5 t,通過這三點(diǎn)的測量值可以擬合結(jié)構(gòu)的線性斜率。針對傳感器測量到的最大值擬合結(jié)果如圖6所示。兩稱的斜率很接近,說明兩秤體很穩(wěn)定。
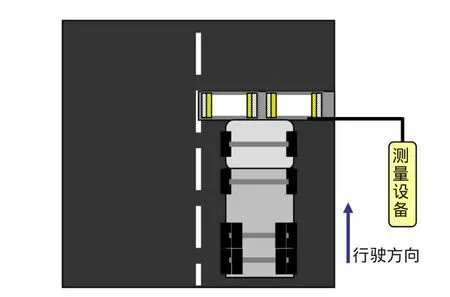
圖5 動態(tài)試驗的實施方案Fig.5 Dynamic experiment implementation plan
1.3.3.2 車輛動態(tài)測量
車輛動態(tài)測量數(shù)據(jù)記錄在表3中。
1.3.3.3 動態(tài)數(shù)據(jù)的解算方法
實時監(jiān)測軟件采用Labview8.5編制[13],軟件采用PCI總線網(wǎng)卡實現(xiàn)和SI425光纖解調(diào)儀的數(shù)據(jù)傳輸,采用軟件觸發(fā)原理,實時捕捉稱體所受外載荷時光纖應(yīng)變狀態(tài)。通過數(shù)值算法提取傳感器的應(yīng)變峰值和載荷時間,并計算車體的運(yùn)行速度。根據(jù)動力學(xué)原理,利用稱體結(jié)構(gòu)和傳感器分布位置反算出車體的重量[14-16]。
當(dāng)車輛以一定的速度通過秤體時,光纖布拉格光柵傳感器采集到的數(shù)據(jù)如圖7所示,圖中曲線按照時間順序具有1、2、3、4四個峰值,說明該車具有四個軸,每個峰值應(yīng)變是最關(guān)鍵的數(shù)據(jù),將這些峰值應(yīng)變代入到對應(yīng)的公式(4)、(5)、(6)就可以計算出加在秤體上的載荷,對于同一軸重采用兩個秤體測量,將兩個秤體測量值相加就是該軸的軸重,將所有軸重相加就可以獲得全車重量。至于車輛速度的測量,可以采用下述方法:由于秤體寬度一定,第一軸的車輪經(jīng)過秤體的時間為t1,用秤體寬度除以t1就可以得到車輛速度。根據(jù)車輛速度還可以計算出某兩個軸之間的軸距。由于同一軸使用兩個秤體進(jìn)行測量,通過車輛位置識別可以測出同一軸上的輪距。通過測量出的軸距、輪距與車型數(shù)據(jù)庫內(nèi)的信息進(jìn)行比較,對車型做出正確判別,繼而判斷車輛是否超載。
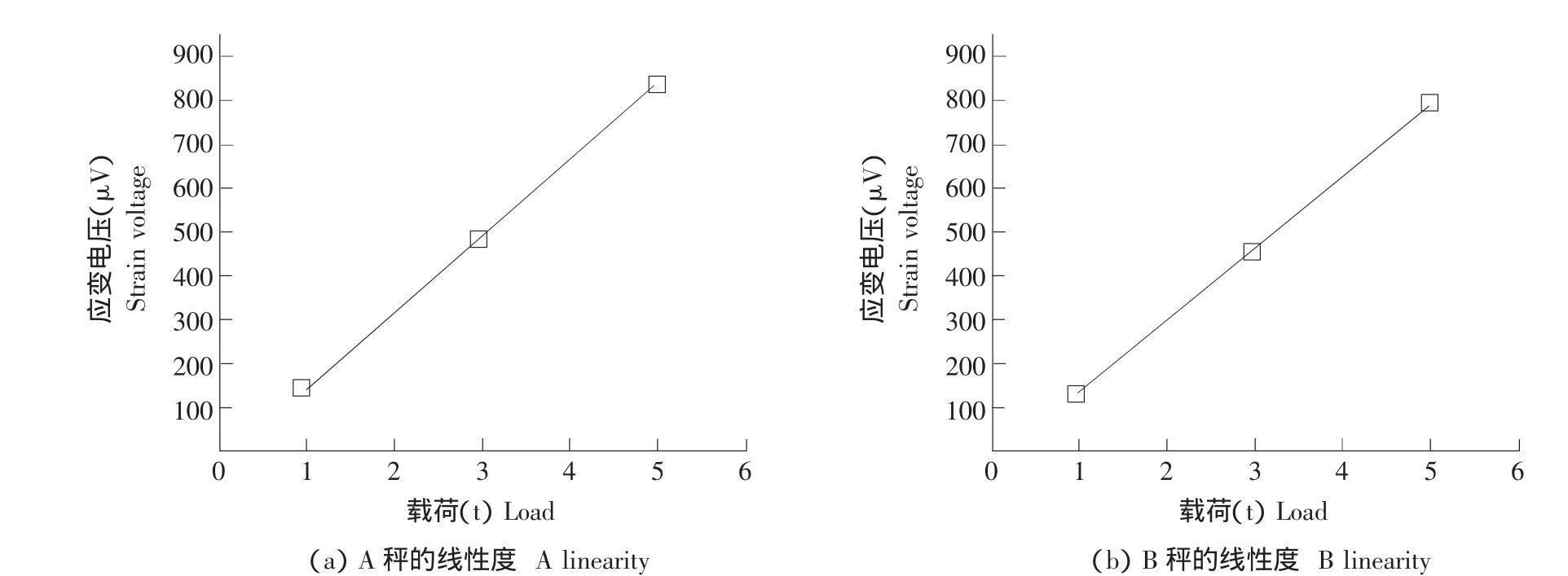
圖6 雙集中力作用下結(jié)構(gòu)的線性度Fig.6 Linearity under the action of pairs concentrated force structure
2 分析驗證
根據(jù)表1和表2的數(shù)據(jù),對靜力試驗誤差進(jìn)行分析,得到應(yīng)變的最大絕對誤差 Δε =20.4,最大相對誤差。
對表3車輛動態(tài)測量數(shù)據(jù)進(jìn)行分析,在剔除粗大誤差之后,得到載荷的最大絕對誤差,載荷的最大相對誤差
由分析結(jié)果可見,無論靜力應(yīng)變試驗,還是動態(tài)載荷試驗,相對誤差都在設(shè)計要求的5%以內(nèi)。
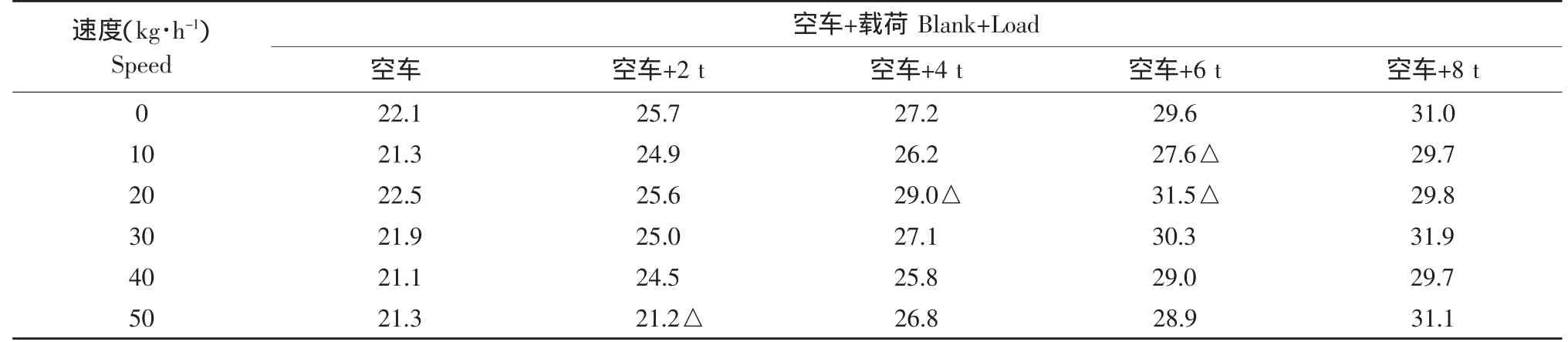
表3 動態(tài)測量記錄數(shù)據(jù)Table3 Dynamic measurement record data (t)
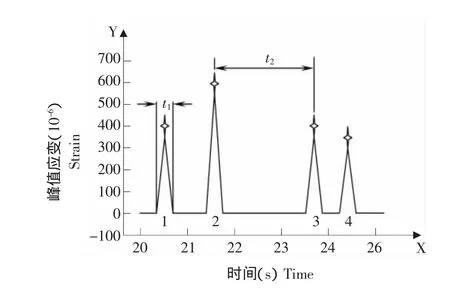
圖7 測量獲得的數(shù)據(jù)形式Fig.7 Measurement obtained data form
3 結(jié)論
a.以靜態(tài)值為基準(zhǔn),測量的誤差最大在2.7%,并且在增添砝碼時,不同載荷下測量到的差值情況較穩(wěn)定,秤體對載荷的變化敏感,系統(tǒng)誤差在設(shè)計的范圍內(nèi),完全滿足設(shè)計指標(biāo)。
b.動態(tài)實驗的測量值具有一定的離散性,這種離散性對秤體稱重的置信度有一定影響,主要有兩方面原因:一是那些離散度很大的測量值都是車輪位置比較靠近秤體邊緣的位置,也就是說車輪壓在了稱重?zé)o效區(qū)域,在這類位置,載荷的解算公式不再適用或已經(jīng)誤差很大;二是秤體本身在最初的設(shè)計時是針對單輪胎駛過秤體時的動態(tài)測量,實驗中的檢衡車第一軸、第二軸為單輪,第三軸、第四軸為雙輪,對第一軸和第二軸的測量使用解算公式可以比較準(zhǔn)確地進(jìn)行,而對于第三、第四軸的測量只能利用砝碼檢稱時的線性關(guān)系進(jìn)行粗略測量,這是將來需要對秤體進(jìn)行改進(jìn)的地方。
[1]馮玉昌,史冬琳,馮鎖麗,等.DSP在動態(tài)稱重系統(tǒng)中的應(yīng)用[J].儀表技術(shù),2007(7):33-34.
[2]賀曙新.車輛動態(tài)稱重技術(shù)的歷史、現(xiàn)狀與展望[J].中外公路,2004(12):104-108.
[3]周祖濂.高速公路管理與WIM技術(shù)[J].衡器,2007,36(5):2-5.
[4]燕昌江,李鋒,徐良梅,等.近紅外光譜技術(shù)在畜牧生產(chǎn)中的應(yīng)用[J].東北農(nóng)業(yè)大學(xué)學(xué)報,2008,39(11):140-144.
[5]宋一弘,劉文洋,楊宇姝.基于IPV6協(xié)議重構(gòu)校園網(wǎng)的研究[J].東北農(nóng)業(yè)大學(xué)學(xué)報,2006,37(6):853-856.
[6]陳宏波,蔡雄飛,姜德生.光纖光柵壓力傳感器的研究[J].武漢理工大學(xué)學(xué)報,2003,25(8):55-56.
[7]胡志新,張桂蓮,張陵.基于薄壁應(yīng)變筒的光纖布拉格光柵壓力傳感器[J].南京理工大學(xué)學(xué)報,2004,28(3):277-280.
[8]廖延彪.光纖傳感發(fā)展近況[J].光電子技術(shù)與信息,2006(6):23-25.
[9]禹大寬,喬學(xué)光,賈振安.光纖光柵傳感系統(tǒng)的現(xiàn)狀及發(fā)展趨勢[J].傳感器,2005,24(3):4-6.
[10]魏魯原,伍斌,崔霞.動態(tài)稱重系統(tǒng)的設(shè)計[J].自動化儀表,2002,23(8):4-37.
[11]宋愛娟,閆冬梅.基于DSP的動態(tài)稱重系統(tǒng)設(shè)計[J].儀器儀表學(xué)報,2003,24(4):115-117.
[12]楊亦飛,劉波,張偉剛,等.工程化光纖光柵應(yīng)變傳感器的制作及其應(yīng)用[J].儀表技術(shù)與傳感器,2005(4):1-2.
[13]沈小燕,林玉池,付魯華,等.LabVIEW實現(xiàn)光纖光柵傳感解調(diào)[J].傳感技術(shù)學(xué)報,2008(1):61-65.
[14]余有龍,譚華耀,錘永康.基于干涉解調(diào)技術(shù)的光纖光柵傳感系統(tǒng)[J].光學(xué)學(xué)報,2001,21(8):987-989.
[15]張洪波,黃海,沈竹.光纖Bragg光柵傳感器的解調(diào)方法[J].傳感器世界,2004(2):26-30.
[16]鄧學(xué)軍,孫璐.車輛—地面結(jié)構(gòu)系統(tǒng)動力學(xué)[M].北京:人民交通出版社,2000:76-79.
猜你喜歡
建材發(fā)展導(dǎo)向(2021年14期)2021-08-23 00:56:16
紡織科技進(jìn)展(2021年3期)2021-06-09 08:07:14
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
纖維復(fù)合材料(2018年3期)2018-04-25 07:22:58
電子測試(2017年11期)2017-12-15 08:57:13
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
應(yīng)用化工(2014年10期)2014-08-16 13:11:29