實現海洋測高衛星厘米級定軌精度的策略分析
2010-01-08 08:31:24劉基余
航天器工程 2010年6期
劉基余
(武漢大學測繪學院,武漢 430079)
1 引言
對地觀測衛星,都要求采用高精度的軌道測量,以便為星載對地觀測設備所采集的數據和圖像提供基準定位數據。利用星載GPS 接收機進行實時定軌測量,是實現高精度定軌的有效技術途徑之一。國外開展的星載GPS 測量定軌實踐表明,能夠達到厘米級的定軌測量精度。例如,2001年發射入軌的Jason-1 海洋測高衛星,其星載GPS 定軌測量精度已達到了±1cm[1]。為了演示驗證厘米級的星載GPS 定位能力,我國開展了基于對里爾、俄制米171型直升機和“運八”等多種飛機的300 余飛行架次機載GPS 測量實踐[2-5]。筆者認為,以上試驗驗證了技術上的可行性,但針對我國擬于2011年發射的海洋二號(HY-2)衛星, 為了實現厘米級精度的星載GPS 定軌測量,還需深化上述研究成果,注重下述的技術問題。
2 技術問題的探討
2.1 選擇適合天線 捕獲多顆在視GPS 衛星
一般的星載GPS 測量,難以進行高程約束解,而至少需要同時觀測到4 顆以上的GPS 衛星,才能解算出三維實時在軌位置。為了確保在軌點位測量的連續性,星載GPS 信號接收天線必須具有穩定接收和跟蹤4 顆以上的GPS 衛星的能力;天線方向性圖的優劣和衛星飛行姿態的穩定與否,便成為能否保持穩定接收和跟蹤的關鍵。GPS 信號接收天線的優劣,取決于它的方向性圖、增益、輸入阻抗、極化和頻帶寬度等天線參數;對于單頻GPS 天線而言,它的帶寬應為1 565~1 586M Hz;對于雙頻GPS 天線而言, 它的第一頻帶寬度(L1)應為1 565~1 586M Hz, 第二頻帶寬度(L2)應為1 217~1 237M Hz,這是穩定接收GPS 信號的重要前提。若所購GPS 天線不能工作于上述頻帶,便難以接收到GPS 信號。根據接收天線理論可知,GPS 信號接收天線的最大輸出功率和信噪比均正比于它的方向性系數ka。現行GPS 信號接收天線的方向性圖多數近于半球體;但是,隨著天線設計和制作工藝的差異,天線的方向截止角(ka 近于零的方向角)彼此相差較大;例如, T rimble 動態天線的方向截止角為15°,而Tecom 401170 型動態天線的方向截止角僅為1°(如圖1 所示)。由此可見,在GPS 衛星處于同一低高度角(如10°)的情況下,用Tecom 401170 型動態天線能夠穩定接收到GPS 信號,而Trimble 動態天線恰好處于方向截止角之內,而接收不到該顆GPS 衛星的導航定位信號,達不到至少同時觀測4顆GPS 衛星的目的。若衛星在飛行過程中,因攝動力的波動起伏而導致較大的傾斜和轉動,這相當于GPS 衛星高度角的躍變,可能導致G PS 信號落于天線方向截止角之內,而中斷在軌點位的實時測量。因此,星載G PS 信號接收天線應該具有小于甚至遠小于1°的方向截止角[6]。
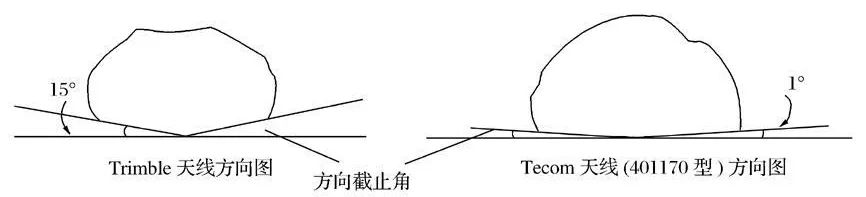
圖1 不同天線的方向截止角示意Fig.1 Direction cut-off angle of various antenna
2010年5月28日,第一顆GPS-IIF 衛星發射成功[7]。GPS-IIF 衛星增加了第三個GPS 導航定位信號(L5),并在第二個GPS 導航定位信號(L2)上,增設了L2-C 測距碼[6],而已知GPS 衛星的第一、第二和第三用導航定位信號的載波頻率分別為fL1=1 575.42M HZ , fL2=1 227.60M Hz, fL5=1 176.45M Hz。
當用調制在上列三個載波上的一個偽噪聲碼測得三個偽距(PL1、PL2和PL5)時,則可按下列算式求得載波相位測量整周模糊度的初始值():
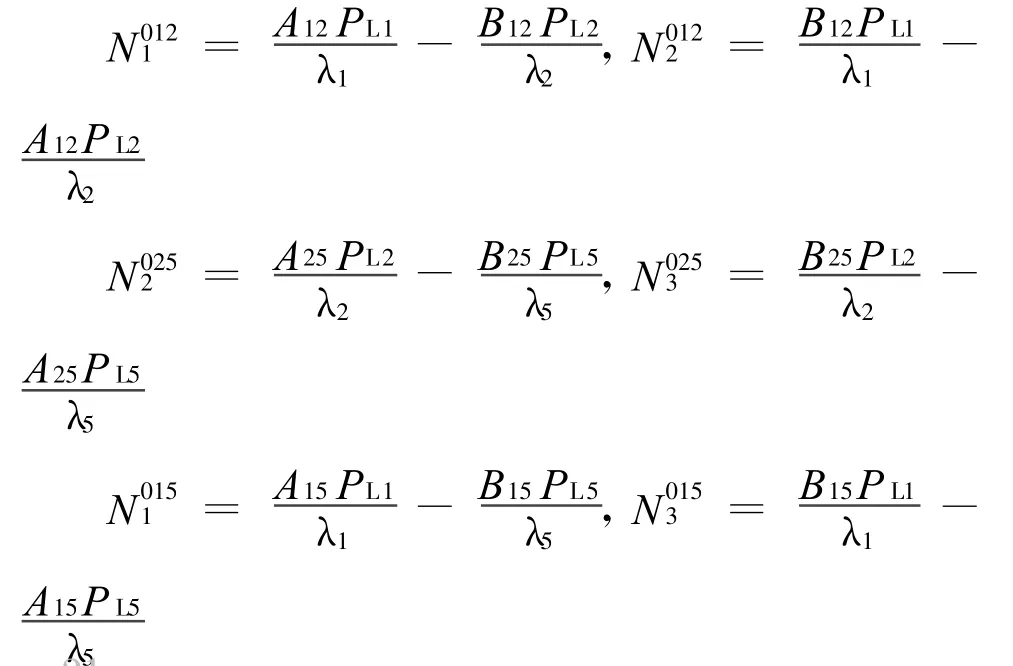
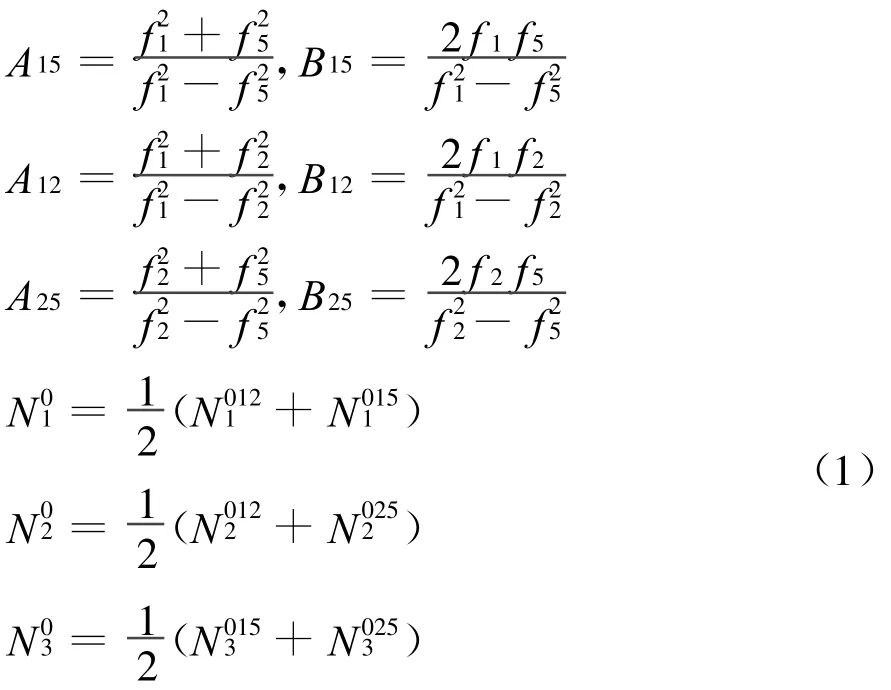
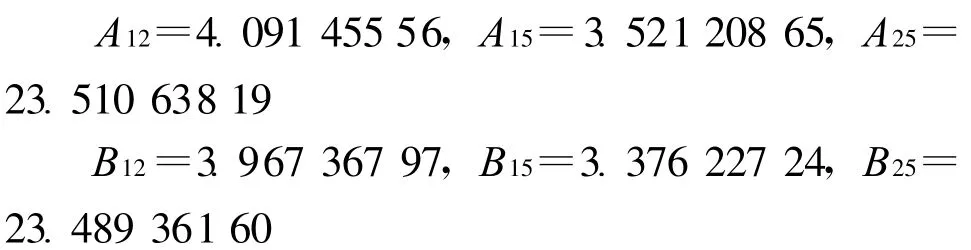
故可按所測得的偽距PL1、PL2、PL5和上列AB系數算得三個整周模糊度的初始值。由此種方法求得的整周模糊度的初始值,比按現行雙頻觀測值求得的整周模糊度的初始值要更接近整周模糊度的最或然值,而可縮小整周模糊度的搜索區間,大大加速解算整周模糊度最或然值的速度,這可為高動態環境下應用GPS 載波相位測量創造了良好的工作基礎。因此,在選擇星載GPS 信號接收天線時,應該考慮第三GPS 導航定位信號(L5)的接收,以便充分發揮GPS 現代化的作用。
2.2 注重天線安裝位置 減弱多路徑效應影響
GPS 測量的多路徑誤差,是G PS 信號的傳播誤差之一;對于P 碼偽距測量而言,其量級為±1m 左右;對于C/A 碼偽距測量而言,其量級為±5m 左右。由此可見,如何減少多路徑效應的不利影響,是值得高度關注的。
星載GPS 測量的多路徑效應,主要來自所在星體及其星上設備對GPS 信號的反射,以及傳播界質的散射波[6]。對于后者的影響,是無能為力的。對前者的影響,關鍵在于星上GPS 信號接收天線的安裝位置。在衛星上設置GPS 信號接收天線時,應該嚴格防止星體及其設備的反射波和信號串擾[8-10]。
從圖2 所示的美法合作的托佩克斯-海神衛星(Topex/Poseidon)的星載G PS 信號接收天線可見,它用豎立桿將GPS 信號接收天線提升到星體的最高位置。由此可知,選擇安裝GPS 信號接收天線位置的原則是:
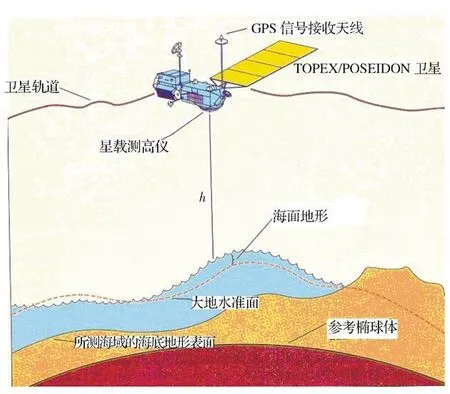
圖2 托佩克斯-海神(Topex/Poseidon)海洋測高衛星的GPS 信號接收天線安裝位置特點Fig.2 Feature of installation of GPS antenna for Topex/Poseidon altimetry satellites
1)位置開闊,能夠接收到所有在視的GPS 衛星的導航定位信號;
2)位置適當,難以接收到本星體及其設備的反射波;3)位置可靠,能夠避開本星體自身的信號串擾。依據上述三原則安裝的星上GPS 信號接收天線,能夠有效地減少多路徑效應的影響。
2.3 選用適合的GPS 信號接收機 確保星載GPS測量數據優質
GPS 衛星導航定位, 是基于被動式測距原理;GPS 信號接收機只要測得用戶天線至GPS 衛星的距離(簡稱為站星距離),即可按下式解算出用戶位置:

式中,
Pj(t)——GPS 信號接收機測得的用戶在時元t 至第j 顆GPS 衛星的距離;
Xj(t),Yj(t),Zj(t)——第j 顆GPS 衛星在時元t 的在軌位置;
Xu(t), Yu(t), Zu(t)——用戶天線在時元t 的在途位置;
du(t)——GPS 信號接收機時鐘偏差等因素引起的站星距離偏差。
從上式可見,為了解算出用戶的三維位置,G PS信號接收機至少要觀測4 顆GPS 衛星,而列立出4個如上方程式。由此可見,G PS 定位精度與用戶航行速度快慢無關,只取決于下列三大因素:
1)站星距離的測量誤差;
2)作為動態已知點的GPS 衛星的實時在軌位置誤差;
3)所測4 顆以上GPS 衛星在空間的幾何分布,即位置精度因子(PDOP)值。
在航天飛行條件下,只有采用GPS 雙頻觀測值,才能夠有效地削弱電離層效應對星載GPS 測量的精度損失,達到高精度定軌的目的。因此,星載GPS 信號接收機的基本條件是必須具備雙頻測量功能,在如今已有第三GPS 導航信號的情況下,應提升到三頻測量功能。
GPS 載波波長較P 碼碼元的相應長度短兩個數量級;在相位測量精度相同的情況下,載波相位測量誤差對測距精度的損失,較P 碼碼相位測量誤差小兩個數量級。不僅如此,載波相位測量的距離分辨率也較P 碼碼相位測量的距離分辨率高得多。因此,對地觀測衛星必須裝備具有雙頻載波相位測量能力的GPS 信號接收機,才能夠實現星載GPS測量的厘米級定軌精度。
經分析認為,對地觀測衛星所載的GPS 雙頻接收機應該具有下列基本技術指標:1)信號波道:平行跟蹤式,24(L1/L2)個;2)觀測值L1-C/A 與L2-C碼偽距, L1/L2 載波相位測量;3)數據更新率20Hz;4)機內存儲器≥596M bit;5)熱啟動時間≤10s;6)衛星重捕時間≤2s;7)功耗≤10W。
GPS 信號接收機的質量優劣,主要表現在測量站星距離的誤差大小。在簡化公式(2)推導的情況下,用L1-P 碼和L2-P 碼測得的偽距分別為

式中,
ρj——GPS 信號接收天線至第j 顆GPS 衛星的真實距離;
用P-L1 載波和P-L2 載波測得的偽距分別為

式中,


或寫成

式(4)的兩個方程相減可得


式中,
由式(6)知,

將式(7)代入式(5)可得
或寫成
上式左邊的第二項,是GPS 載波相位測量的整周模糊度偏差距離之差。用我們自己的DDKINOTF 動態載波相位測量數據處理軟件多次解算的實踐表明:一般用10 個時元的載波相位測量數據,即可固定整周模糊度之解,以致式(8)左邊的第二項可以忽略不計,故有
依式(9)的推導方法,可得
當略去上式左邊的第二項時,則得

考慮到fL1=1 575.42MHz 和fL2=1 227.60MHz則知:α=1.646 944;故有+

對四種最新的GPS 雙頻接收機半小時實際測量數據解算表明:的均值分別為0.135m~6.326m ;MjL2-P 的均值分別為0.178m~8.675m。這些數值能夠較好地反映GPS 雙頻接收機的性能優劣;一般而言,和的均值越 小,其接收機的作業性能就越好,也越能獲得較高而穩定的GPS 衛星定位精度。
GPS 信號在接收機內部從一個電路到另一個電路的行進中,存在內部時延。它的大小可以根據電路參數計算求得;如果內時延是穩定而不變動的話,經過內時延改正后的站星距離,便不存在測量精度的損失。但是,由于波道時延的不穩定性,中頻信號的相位抖動和接收天線的相位中心漂移,不可能實現接收機內時延的精確修正。為了監控內時延的不穩定性,需要定期地檢驗GPS 信號接收機;其具體檢驗方法請閱參考文獻[6]。
衛星厘米級定軌,不僅需要高性能的星載GPS信號接收機,而且需要一個跨度較大的GPS 基準網[9]。利用我國設立在澳大利亞墨爾本定軌觀測站和阿根廷圣胡安衛星激光測距站,以及我國在南極中山站所建立的GPS 跟蹤站,與國內現有的IGS(International GPS Service)跟蹤站,可構成GPS 國際基準網。
此外,還需注重減少大氣阻力攝動對低軌衛星定軌的精度損失[11]。對于在965km 高度運行的海洋二號衛星而言,大氣阻力,是一種重要的攝動力。而且它又是一種復雜而多變的攝動力;其主要原因源于大氣密度的復雜多變。大氣密度的分布,不僅隨大氣層的高度和溫度而變化,而且隨時間不同而異;例如,白天的大氣密度大,晚間的大氣密度小。此外,大氣密度還與緯度、季節、太陽活動和地磁等因素有關。因此,大氣阻力攝動,是一項難以精確模型化的攝動量。對于要求厘米級定軌精度的對地觀測衛星,國外的航天工程實踐證明,下述方法是有效的:給對地觀測衛星裝備衛星加速度計,以此實時地測定大氣阻力攝動導致的衛星加速度,進而用它與星載GPS 測量數據進行融合處理,精確地解算出衛星的實時在軌位置。
3 結束語
據報道,2011年我國將發射海洋二號衛星;該衛星將裝備星載多普勒無線電定軌定位系統(Doppler Orbitography and Radiopositioning Integrated by Satellite,DO RIS)接收機、星載GPS 信號接收機和星載激光角反射器,以便實現高精度高可靠的厘米級定軌測量。依據的機載GPS 300 余飛行架次的實踐經驗,本文較詳細地分析了實現海洋二號衛星星載GPS 厘米級定軌測量的下列策略:選擇適合天線,捕獲多顆在視GPS 衛星;注重天線安裝位置,減弱多路徑效應影響;選用適合的GPS 信號接收機,確保星載GPS 測量數據優質。筆者期待這些策略能夠付諸航天工程實施。
)
[1]Jet Propulsion Laboratory.NASA launches ocean satellite to keep a weather, climate eye open[R/OL].NASA Jep.[2010-07-01].http://w ww .nasa.gov/mission_ pages/ostm/news/ostm-20080620.htm
[2]Liu Jiyu.Evaluation practice on airborne GPS data quality[J].Survey Review , 2002, 36(284):463-469
[3]Liu Jiyu, Chen Xiaoming.The confidence evaluation for airborne GPS data[J].Geo-spatial Information Science,2000, 3(1):50-56
[4]Chen Xiaoming, Liu Jiyu, Li Deren.OTF method and its practice on airborne GPS data processing for photogrammetry[M]// 1997《測繪學報》英文選集.北京:測繪出版社,1998:35-44
[5]Chen Xiaoming, Liu Jiyu, Li Deren.GPS kinematic carrier phase measurements for aerial photogrammetry[J].ISPRS Journal of Photogrammetry and Remote Sensing, 1996, 51(5):230-242
[6]劉基余.GPS 衛星導航定位原理與方法(第二版)[M].北京:科學出版社,2010
[7]Scott P, Schric V S.Air Force upgrades GPS constellation[EB/OL].[2010-07-01].http://w ww .globalsecurity.org/space/library/new s/space-100601-afnsol.html[8]Jiyu L.Multipath and GPS station selection [J].GPS World, 1991, 2(3)
[9]Exertier P.Cont ributions of satellite laser ranging to past and future radar altimetry missions[J].Surveys in Geo-physics, 2001, 22:491-507
[10]Benveniste J.The radar altimetry mission:RA-2,MWR, DORIS and LRR[J].ESA Bulletin, 2001(106)
[11]劉基余.海洋二號衛星厘米級定軌的實施建議[J].海洋測繪,2005, 6:1-3
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
