404 Not Found
404 Not Found
基于三維激光掃描的建筑立面測繪與三維模型構(gòu)建技術(shù)




摘" 要:該文以某樓房作為研究對象,探究基于三維激光掃描的建筑立面測繪與三維模型構(gòu)建技術(shù)。在現(xiàn)場踏勘基礎(chǔ)上確定測站位置,在測站架設(shè)三維激光掃描儀獲取點云數(shù)據(jù)后,依次采取點云配準、點云去噪、數(shù)據(jù)精簡等預(yù)處理措施,提高點云數(shù)據(jù)質(zhì)量。將點云數(shù)據(jù)封裝后導(dǎo)入Geomagic Studio 2012軟件中構(gòu)建點云模型,經(jīng)過模型孔洞修補后檢測精度,點位精度誤差為0.003 m,滿足建模要求。將點云格式更改為las格式后輸入到AutoCAD軟件中繪制立面圖,并使用建筑立面圖和數(shù)碼照片得到目標建筑物的三維實體模型,為建筑管理維護提供依據(jù)。
關(guān)鍵詞:三維激光掃描;立面測繪;點云數(shù)據(jù);三維實體模型;建筑管理維護
中圖分類號:P234.4" " " 文獻標志碼:A" " " " " 文章編號:2095-2945(2025)02-0189-04
Abstract: This paper takes a building as the research object to explore the building facade surveying and three-dimensional model construction technology based on three-dimensional laser scanning. The location of the station is determined based on on-site reconnaissance. After setting up a three-dimensional laser scanner at the station to obtain point cloud data, pretreatment measures such as point cloud registration, point cloud noise removal, and data streamlining are taken in turn to improve the quality of point cloud data. The point cloud data was encapsulated and imported into Geomagic Studio 2012 software to build a point cloud model. After repairing the model holes, the detection accuracy showed that the point accuracy error was 0.003 m, which met the modeling requirements. Change the point cloud format to las format and input it into AutoCAD software to draw elevations, and use the building elevations and digital photos to obtain a three-dimensional solid model of the target building, thus providing a basis for building management and maintenance.
Keywords: 3D laser scanning; elevation surveying; point cloud data; 3D solid model; building management and maintenance
三維激光掃描是一種常用的非接觸測量技術(shù),具有數(shù)據(jù)獲取速度快、可直接生成三維空間成果等優(yōu)勢,在建筑物維護、地形圖測繪及機械交通、市政建設(shè)等多個領(lǐng)域均有廣泛應(yīng)用。將三維掃描技術(shù)應(yīng)用到建筑立面測繪與三維建模中,點云數(shù)據(jù)的采集與處理,以及點云模型的構(gòu)建與優(yōu)化和建筑立面圖的繪制等都是必須要重點把控的技術(shù)要點,本文結(jié)合建筑實例對三維激光掃描數(shù)據(jù)處理與立面圖繪制等展開了分析。
1" 建筑物點云數(shù)據(jù)的采集
1.1" 現(xiàn)場踏勘
以某中學(xué)的行政樓作為研究對象,建筑前方為主干道,道路兩旁為綠化帶,樹木較多;建筑物整體呈“L”型,共4層,建筑高度12.5 m。建筑物表面有玻璃窗、空調(diào)外機等,表面結(jié)構(gòu)信息充足。首先使用全站儀、數(shù)碼相機等設(shè)備進行現(xiàn)場踏勘,了解建筑物及其周邊區(qū)域的相關(guān)信息。在觀察測區(qū)環(huán)境的基礎(chǔ)上繪制現(xiàn)場草圖,掌握目標建筑物的形狀以及周圍遮蔽情況,估算三維激光掃描中所需測站數(shù)量以及測站位置。結(jié)合數(shù)碼相機拍攝的照片,確定建筑物表面的紋理特征。
1.2" 準備工作
使用Riegl VZ-1000型三維激光掃描儀采集數(shù)據(jù),該儀器激光發(fā)射頻率可以達到30萬點/s,最大掃描范圍可以達到1 400 m,每100 m掃描范圍內(nèi)的誤差控制在±5 mm以內(nèi)。內(nèi)置高精度單反數(shù)碼相機,在獲取點云數(shù)據(jù)的同時也能拍攝建筑物的高分辨率照片。該儀器支持線掃描(垂直掃描)和面掃描(水平掃描)2種工作模式,掃描參數(shù)見表1。
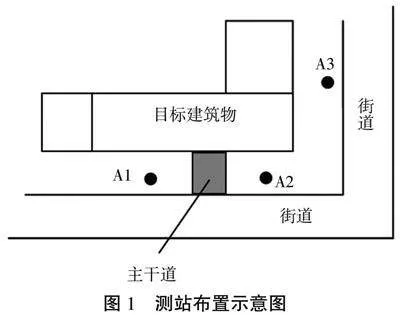
在準備工作中,檢查三維激光掃描儀運行工況是否正常,配套的三腳架、筆記本電腦等是否準備齊全,保持電池為滿電狀態(tài),避免因為電池沒電造成點云數(shù)據(jù)丟失的情況。同時,結(jié)合現(xiàn)場踏勘信息,進一步確定測站的精確位置和具體數(shù)量。本項目中分別在目標建筑物樓前主干道兩側(cè)以及側(cè)面設(shè)置了3個測站(A1~A3),測站與目標建筑物之間的距離為25 m,具體布設(shè)情況如圖1所示。使用全站儀和GPS進行控制測量,獲取3個測站在國家大地坐標系中的坐標。
1.3" 數(shù)據(jù)采集
在測點上架設(shè)儀器,啟動筆記本電腦上的RiSCAN PRO軟件控制三維激光掃描儀開始數(shù)據(jù)采集。在軟件上設(shè)置各項參數(shù),例如將掃描模式設(shè)置為“全景掃描”,將分辨率設(shè)定為“10 mm”,確定目標建筑物的范圍和方位以后,再將分辨率調(diào)整為“2 mm”進行精細掃描,獲取建筑物的點云數(shù)據(jù)。當(dāng)儀器完成一遍掃描后,檢查點云數(shù)據(jù)的質(zhì)量,如果局部數(shù)據(jù)缺失或者明顯異常,需要對該區(qū)域進行補測,提高點云數(shù)據(jù)的完整性和可用性[1]。最后將點云數(shù)據(jù)保存到新建文件中,并按照順序開始下一個測站的掃描工作,重復(fù)上述操作步驟直到3個測站的掃描任務(wù)全部結(jié)束。在采集數(shù)據(jù)時發(fā)現(xiàn),由于視場角限制,三維激光掃描儀在垂直方向上掃描時會存在一定的“盲區(qū)”,導(dǎo)致點云數(shù)據(jù)不完整。因此相鄰2個測站之間需要有一定的重疊區(qū)域,方便后期數(shù)據(jù)配準。本項目中將重疊區(qū)域設(shè)置為最大掃描區(qū)域的20%,配合數(shù)碼相機拍攝的照片,可以提供更加完整的建筑物表面特征信息。
2" 建筑物點云數(shù)據(jù)的預(yù)處理
使用三維激光掃描儀獲取海量的點云數(shù)據(jù)后,考慮到其中摻雜著一部分模糊、重復(fù)的冗余數(shù)據(jù),因此需要通過數(shù)據(jù)預(yù)處理提高建模效率和保證建模精度。本項目使用Geomagic Studio 2012軟件進行點云數(shù)據(jù)的配準、去噪、精簡等一系列操作,處理流程如圖2所示。
2.1" 點云數(shù)據(jù)配準
在三維激光掃描儀采集點云數(shù)據(jù)時,由于產(chǎn)品精度、外界環(huán)境等因素的干擾,不可避免會出現(xiàn)誤差,點云數(shù)據(jù)配準可以減小這種誤差進而提高建模的準確性。常用的點云數(shù)據(jù)配準方法有基于標靶的配準、基于公共點的配準等若干種,本項目中選用基于公共點的配準方法,并結(jié)合數(shù)碼相機提供的影像信息完成點云的配準。操作方法如下:啟動Geomagic Studio 2012軟件,導(dǎo)入任意2個測站的點云數(shù)據(jù),選擇“手動注冊”方式將2個測站的點云視圖拖動到一個視圖窗口中,使其處于相近位置后,從2個測站點云中選取3個帶有明顯標識的公共點(如拐點),通過對齊公共點的方式完成點云數(shù)據(jù)的初始拼接。拼接后檢測2個測站點云間的平均距離為0.008 m,標準偏差為0.019 m,符合初始配準精度要求。
2.2" 點云數(shù)據(jù)去噪
點云數(shù)據(jù)中的噪聲點主要來源于2方面,其一是三維激光掃描儀自身產(chǎn)生的粗差點云;其二是建筑物周邊環(huán)境,如移動的行人、雜亂的電線等。去除噪聲點對提高建模精度以及生成信息更加豐富、紋理更加清晰的建筑物立面圖有積極幫助。常用的點云數(shù)據(jù)去噪方法有3種:對于可以觀察發(fā)現(xiàn)的較為明顯的噪聲點,手動框選或者點選后將其刪除即可;對于樹木、空氣中的粉塵顆粒等,使用該軟件自帶的“采樣”功能,采集噪聲點后分離出去;對于其他密度不均、靠近建筑物的噪聲點,可通過軟件提供的“去噪”功能完成處理[2]。
在點云數(shù)據(jù)去噪中,為了較為徹底地去除噪聲點需要反復(fù)進行迭代,合理設(shè)置迭代次數(shù)是保證去噪效果的關(guān)鍵。如果迭代次數(shù)太少,點云數(shù)據(jù)中仍然保留一些噪聲點,達不到提高建模精度的效果;如果迭代次數(shù)太多,耗費時間太長,影響建模效率。本項目中采用逐次增加的方式,探究了迭代1~4次的去噪效果,噪聲點剔除量以及偏差情況見表2。
由表2數(shù)據(jù)可知,隨著迭代次數(shù)的增加,從點云數(shù)據(jù)中剔除的噪聲點數(shù)量越多,相應(yīng)的標準偏差與運行時間也會同步增加。橫向?qū)Ρ瓤梢园l(fā)現(xiàn),前3次迭代的去噪效果較好,第4次迭代時剔除噪聲點僅減少了1 278個,比第3次迭代(2 932個)少了1 654個。因此,迭代次數(shù)為3次時綜合效果較好,在本項目的點云去噪中將迭代次數(shù)設(shè)定為3次。
2.3" 點云數(shù)據(jù)精簡
目標建筑物的建筑面積越大,掃描分辨率越高,獲取到的點云數(shù)據(jù)就會越多,基于公共點的點云配準雖然提高了數(shù)據(jù)的完整性,但是也會帶來數(shù)據(jù)冗余問題,因此為了提高建模速度還需要對點云數(shù)據(jù)進行精簡處理。Geomagic Studio 2012軟件提供了“統(tǒng)一采樣”功能,通過均勻抽稀的方式調(diào)整點云間的疏密程度,對于過于密集的點云隨機剔除一部分,并且重新調(diào)整間距保證點云疏密均勻,達到精簡數(shù)據(jù)的目的[3]。本項目中經(jīng)過點云配準、降噪2個處理步驟后,共有點云數(shù)量940萬個,經(jīng)過數(shù)據(jù)精簡處理后減少到370萬個。
3" 目標建筑三維模型的構(gòu)建
3.1" 建筑點云模型的構(gòu)建
對于完成配準、去噪、精簡等預(yù)處理的點云數(shù)據(jù),使用 Geomagic Studio 2012軟件的“封裝”功能進行封裝,并將原來的“點對象”轉(zhuǎn)換成“多邊形對象”,得到建筑物立面的拓撲連接。此時得到的建筑立面存在許多孔洞,這些孔洞的形成原因有多種,例如掃描時目標物被樹木、行人遮擋造成局部點云數(shù)據(jù)丟失,或者是目標物表面材料有很強的吸光性導(dǎo)致激光產(chǎn)生散射無法獲取點云數(shù)據(jù)等。對于這類問題可通過Geomagic Studio 2012軟件中的“填充孔”命令完成對模型孔洞的填補。對于不同面積、不同形狀的孔洞,修補方式也不盡相同。如果是面積較小、形狀比較規(guī)則的孔洞,可以從“填充孔”的子菜單中選擇“完整孔”,逐個完成單孔填充;如果是面積較大且形狀復(fù)雜的孔洞,首先通過“搭橋”處理填補邊角位置,得到一個形狀規(guī)則的孔洞后,再使用“完整孔”功能進行修補。在孔洞修補完畢后,可以得到較為完整的建筑物點云模型。
在建立建筑點云模型后還要檢測模型精度。選擇相同的特征線,將實地測量結(jié)果與Geomagic Studio 2012軟件測量結(jié)果進行對比,根據(jù)兩者之間的誤差判斷精度是否達標。使用鋼尺實地測量特征線的長度,為了消除誤差可以多次測量后計算平均值;使用Geomagic Studio 2012軟件自帶的“測距”功能獲得特征線的長度。本項目中選取了一樓層高作為特征線,鋼尺測量結(jié)果為3.303 m,軟件測量結(jié)果為3.306 m,兩者的誤差為0.003 m,說明使用三維激光掃描技術(shù)構(gòu)建的點云模型能夠精確地反映建筑物表面的三維信息[4]。
3.2" 生成建筑物立面圖
建筑物立面圖中展示了建筑外貌、外部結(jié)構(gòu)以及裝飾造型等信息。理論上來說,使用點云數(shù)據(jù)作為原始數(shù)據(jù),可以按照1∶1的比例直接繪制出建筑立面圖,并且能精確、全面地反映建筑表面的紋理特征。但是在實際操作中,由于點云數(shù)據(jù)多達幾百萬個,繪圖軟件處理數(shù)據(jù)耗費時間較長。因此,為了提高工作效率需要對點云數(shù)據(jù)進行分割處理,然后再由AutoCAD軟件分別繪制建筑物立面圖,最后再進行拼接。建筑物立面圖的繪制流程如圖3所示。需要注意的是,點云數(shù)據(jù)為rcp格式,而AutoCAD不支持該格式,需要將rcp格式數(shù)據(jù)轉(zhuǎn)換成las格式后再輸入到AutoCAD中。
3.3" 生成建筑物三維實體模型
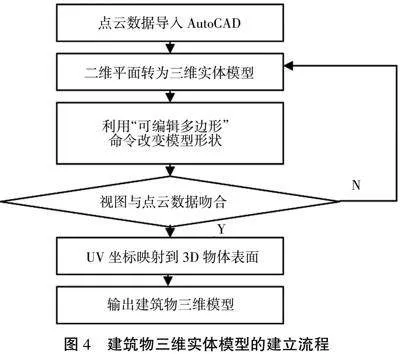
三維實體模型具有“所見即所得”的效果,對建筑物的管理維護可以提供幫助,可以根據(jù)點云數(shù)據(jù)直接生成三維模型,也可以根據(jù)建筑物立面圖反演出三維模型。為了更好地體現(xiàn)建筑物的結(jié)構(gòu)特征,保證模型盡可能還原真實建筑物,本文結(jié)合數(shù)碼相機拍攝所得照片,使用反演法構(gòu)建建筑物三維實體模型。具體流程如下:將轉(zhuǎn)換成las格式的點云輸入導(dǎo)入AutoCAD軟件中,通過點云數(shù)據(jù)及數(shù)字圖片勾勒出建筑物的基本形狀,然后使用軟件中的“擠出”命令把二維平面轉(zhuǎn)化成三維實體模型。再使用“可編輯多邊形”命令對三維實體模型進行修整,然后判斷視圖與點云數(shù)據(jù)尺寸信息是否匹配[5]。如果不匹配,則重復(fù)上述步驟,直到信息完全匹配。利用軟件提供的“UV貼圖”功能,將UV坐標(二維坐標)映射到3D物體表面,展現(xiàn)模型表面的紋理特征,讓模型的紋理貼圖與真實建筑物的外觀樣貌相同。目標建筑物三維實體模型的構(gòu)建流程如圖4所示。
4" 結(jié)束語
三維激光掃描技術(shù)具有精度高、效率快、模型可視化等特點,在建筑工程的建設(shè)、維護、管理等方面發(fā)揮著重要作用。在應(yīng)用該技術(shù)時,一方面要合理布置測點盡可能全面地獲取建筑表面的點云數(shù)據(jù),另一方面還要對采集到的點云數(shù)據(jù)進行一系列的處理,包括點云配準、點云去噪等,提高點云數(shù)據(jù)的利用價值。在此基礎(chǔ)上使用點云數(shù)據(jù)構(gòu)建點云模型,繪制目標建筑物的立面圖與三維實體模型,實現(xiàn)對建筑物的數(shù)字化管理。
參考文獻:
[1] 楊其璇,任瑞亮,馬全明.三維激光掃描與BIM技術(shù)融合的城市軌道交通地下建筑物三維建模方法[J].測繪通報,2024(4):119-123.
[2] 王宇翔,沈月千.基于三維激光掃描技術(shù)的巖體結(jié)構(gòu)面智能識別方法[J].激光與光電子學(xué)進展,2024,61(14):138-147.
[3] 李友兵.基于傾斜攝影測量技術(shù)和點云數(shù)據(jù)的古建筑三維模型構(gòu)建[J].測繪科學(xué)技術(shù),2023,11(4):334-341.
[4] 朱冬.協(xié)同三維激光掃描技術(shù)和傾斜攝影測量的歷史建筑建檔[J].華北自然資源,2024(1):88-93.
[5] 孫博,白樹海,華遠峰.三維激光掃描儀在建筑立面測繪中的應(yīng)用研究[J].山西建筑,2019,49(14):159-160.
作者簡介:徐晶鑫(1991-),男,碩士,工程師。研究方向為測繪。