基于多源時空點云融合技術的高標準農田建設規劃
2024-12-31 00:00:00劉遐齡崔兆巖葉航王曉強鄭禮
中國農業科技導報 2024年7期




摘要:為解決在高標準農田建設規劃中存在的田間道路不完整,部分田塊大小不一、散亂、不規則,農田挖填方量評估不準和建設工期過長等問題,基于多源時空點云融合技術,提出了一種多源數據融合技術,該技術結合了機載激光雷達、高清數碼相機等多種數據,利用機載激光雷達獲取的高精度數字高程模型和數字正射影像獲取現勢性強且分辨率高的影像數據,并結合大比例尺地形要素數據,為高標準農田建設提供精確量化的前端基礎數據,實現高標準農田建設工程的快速規劃和精準實施。結果表明,該多源時空點云融合技術能夠有效地應用于高標準農田建設前期規劃,不僅可以提高工作效率、降低成本,在減少數據缺失和錯誤方面還具有較大潛力。
關鍵詞:多源時空;機載激光雷達;高標準農田;前期建設
doi:10.13304/j.nykjdb.2023.0228
中圖分類號:S28 文獻標志碼:A 文章編號:1008?0864(2024)07?0080?13
高標準農田主要是指土地平整、集中連片、設施完善、農田配套、土壤肥沃、生態良好、抗災能力強,與現代農業生產和經營方式相適應的旱澇保收、高產穩產,劃定為永久基本農田的耕地。我國正處于從傳統農業向現代農業過渡的關鍵時期,人們對糧食等農產品的需求日益增長。高標準農田建設不僅是深入實施“藏糧于地、藏糧于技”戰略和實現鄉村振興的重要抓手,也是農民持續增收的重要保障[1?2]。全國各地大力推進高標準農田建設,但在部分地區,特別是大面積地形復雜、植被茂森區域的高標準農田建設工程中,存在部分田塊大小不一、散亂、不規則,高標準農田劃分不精確,田間道路不完善,人力成本過高,現代農業發展水平較低等問題。針對這些問題,有必要對高標準農田建設前期農田情況通過遙感進行實時、精準監測,為高標準農田建設工程的順利實施提供準確的數據支撐,以實現工程科學規劃,科學施工。
機載激光雷達(LiDAR)作為一種重要的對地觀測技術手段,其激光探測及測距系統集成了全球定位系統(global positioning system,GPS)、IMU(inertial measurement unit)、激光掃描儀等傳感器,可全天候工作,穿透植被,同時測量地面和非地面層,獲取點間距小于1 m的密集點陣數據,其數據的平面、高程絕對精度在0.3~0.1 m內。相比衛星遙感監測技術,LiDAR不僅能獲取高精度的數字地面模型,滿足高精度影像微分糾正的需要,還可獲取多次回波、反射強度、反射點RGB(red、green、blue)值等數據,為目標識別、地物精確分類提供參考數據[3]。另外,無人機航空攝影技術憑借飛行、續航等優勢,成為當前航空遙感監測的重要手段,在工程建設中得到廣泛應用,其獲取的高分影像可為國土土地利用調查和情況摸查提供基礎數據。總的來說,這些多源數據為高標準農田建設前期規劃提供了實用、可靠的技術支持。
近年來,隨著高標準農田建設工程的推進,學者展開了一系列相關研究。許夢夢[2]基于耕地圖斑,通過從區域自然條件、位置、基礎設施情況、生態4個方面,對研究區高標準農田建設區域進行劃分。陳震等[4]利用國產高分2號衛星影像作為數據源,基于分形圖像分割并結合BP(backpropagation)神經網絡對高標準農田進行分類。Admire[3]也利用國產高分2號衛星對高標準農田建設,特別是違規行為進行動態監測。張華平等[5]基于高標準農田建設前后的高程點加密,對比分析加密前后生成的地表模型及土方量計算結果,評估了優化后的地表模型,該研究僅對高標準農田建設后的地面整治進行了評價,而未對建設前提供實際規劃。宗銘銘[6]提出了基于K-D樹(Kdimensiontree)結構改進的K近鄰距離的去噪算法,盡可能保留了點云數據的場景信息和地形的結構特征。陳鵬等[7]在不同手段獲取土石方測量數據的基礎上,研究了點云數據密度與獲取土方準確率的關系,驗證了傳統全站儀或RTK(realtimekinematic)離散點獲取方式。
綜上,國產高分衛星的總體精度較高,可基本滿足高標準農田建后利用情況的遙感監測。但因其透視幾何定位成像的基本工作原理,在高程精度上難以進一步提高,從而限制了在精細規劃上的應用能力,且因光照條件和季節變化等因素干擾,影像獲取周期較長。無人機機載LiDAR及三維激光掃描技術則在根源上解決了大量高精度地面高程數據快速獲取的難題,能更好地滿足高標準農田建設工程對更為精細的地表數據的需求。同時,該技術還可為農田水利設施配套規劃、數字農業和智慧農業相關現代農業設施裝備的安置安排等服務,以及對高標準農田建設施工單位任務完成情況的核查、高標準農田建后利用情況的實時監管提供高效、精準的決策信息,為國家耕地保護、糧食安全提供技術支撐。因此,本研究以四川省宜賓市蕨溪鎮黃金村為研究區,選取該地區機載激光雷達點云數據、高分航攝影像等多源數據作為數據源,開展高標準農田建設前期的田塊規劃、生產道路調整、土方量精確估算等應用分析,以期為解決高標準農田建設難題提供參考。
1 材料與方法
1.1 研究區概況
四川省宜賓市蕨溪鎮黃金村,作為敘州區岷江蔬菜現代農業園的核心區域,位于四川盆地南緣,長江上游,金沙江、岷江下游,川滇兩省結合部。地勢西南高、東北低。地貌以平原丘陵為主,平均海拔300 m左右。該村水資源豐富,有6大支流干線穿越村內,河網分布密集。且該區屬亞熱帶季風濕潤氣候,四季分明,氣候溫和,雨水充沛,光照充足,土壤肥沃,特別適合蔬菜、曬煙、花生等農作物生產。
1.2 總體技術流程
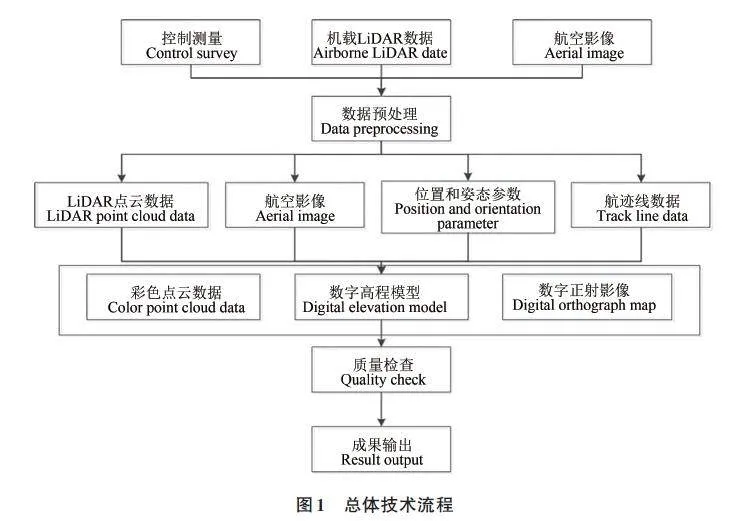
總體工藝流程如圖1所示。首先分析研究區已有資料,了解基本自然地理、交通、氣象、空域等情況;然后再申請空域,制定相應的航攝規劃,獲取機載LiDAR點云數據、航空影像、位置和姿態參數(position and orientation system,POS);最后處理機載 LiDAR 的點云數據、航空影像數據、后差分定位和姿態參數數據、航跡線數據。
1.3 數據獲取
1.3.1 數據獲取裝備
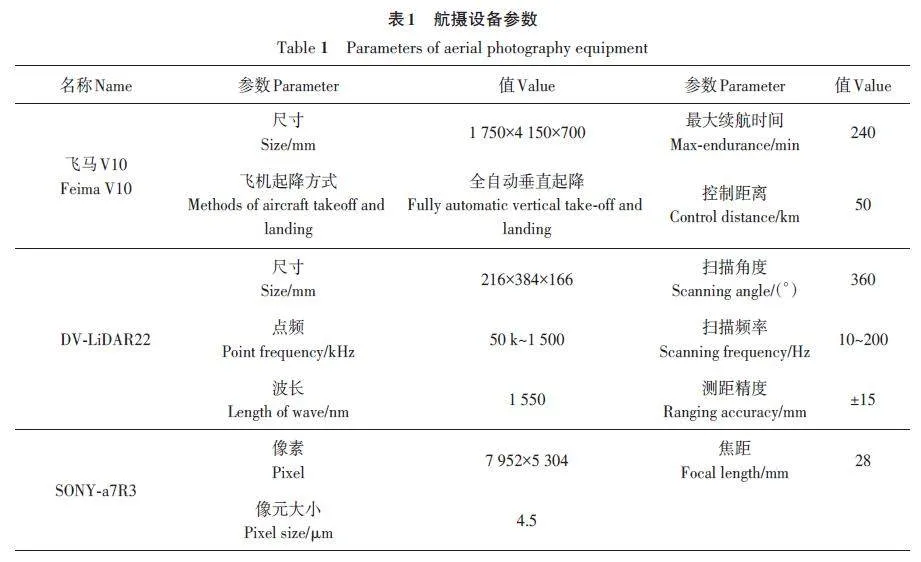
根據研究區狀況,選用飛馬V10垂直起降長航時固定翼無人機作為飛行平臺,并搭載DV-LiDAR22 激光雷達模塊和SONYa7R3相機開展航攝作業,航攝設備及其參數如圖2、表1所示。
1.3.2 數據獲取流程
按照航攝影像技術相關標準先后開展空域申請、航線設計、飛行檢校、數據獲取、外業控制測量、精度檢校等工作,數據獲取流程如圖3所示。
1.4 數據處理。
參照機載激光雷達數據處理相關技術規范,采用TerraSolid、PhotoMap等軟件對Lidar點云、航攝影像等數據進行處理,獲取研究區數字正射影像、數字高程模型、地貌暈渲圖等成果。
2 結果與分析
2.1 數據獲取結果
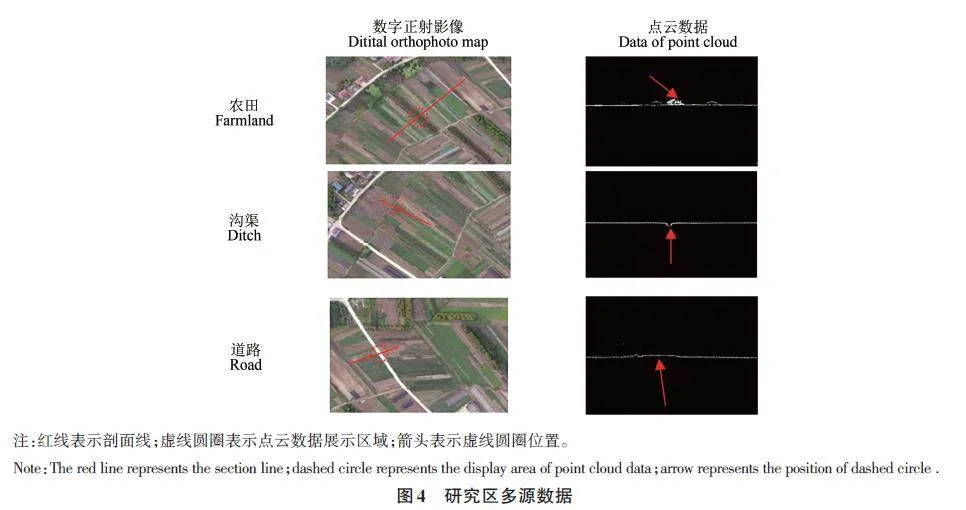
本研究共獲取研究區12.5×106 m2 多源遙感數據,其中,機載激光雷達點云密度不低于16 個·m-2,數字影像分辨率優于0.2 m。分別在農田、溝渠、道路位置各提取1條剖面線,獲取該位置處的剖面點云,如圖4所示。基于數字正射影像和LiDAR點云的優勢,不僅可以從影像獲取不同地物的色調和紋理特征,還可基于點云獲取不同地物較為精準的高程信息,如農田、農作物和道路。另外,還可以識別出影像上難以識別的隱藏地形特征,如溝渠的位置、深度以及走向信息。
2.2 研究區數據成果概況
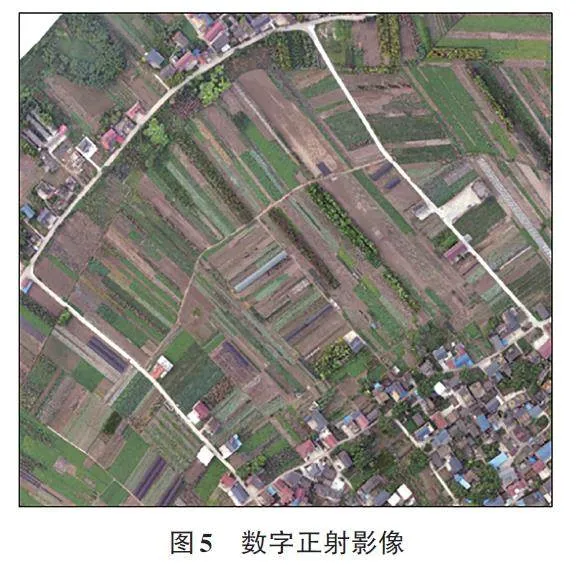
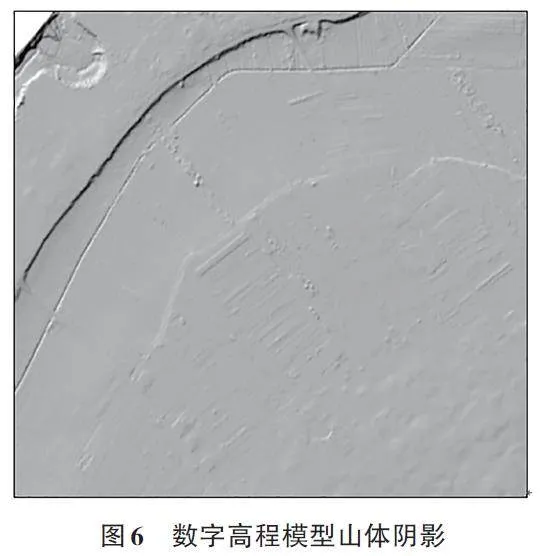
選取研究區中局部區域作為試驗區,約153 333 m2,如圖5和6所示。從試驗區數字正射影像可以看出,該區域田塊區劃較為散亂、田坎較多,農作物大部分屬于低矮植被(圖5)。通過量測試驗區數字高程模型發現,相鄰田塊面高差較小,約0.005 m,田坎高差不一,局部存在高程低于相鄰田塊等情況,一條溝渠貫穿研究區(圖6)。
2.3 田塊規劃
通過試驗區數字高程模型高程起伏形態可知試驗區主要為平壩地形。在高標準農田“田網”建設標準中要求地塊規范且田型方正。因此,基于該區域數字高程模型生成的等高線、地形高程走勢,以現狀道路(機耕路)為骨架,按照“小并大、彎改直”的原則,設計格網田塊長100~140 m,寬80~100 m,共劃分12個塊田[10?11],如圖7所示。
2.4 田間道路調整
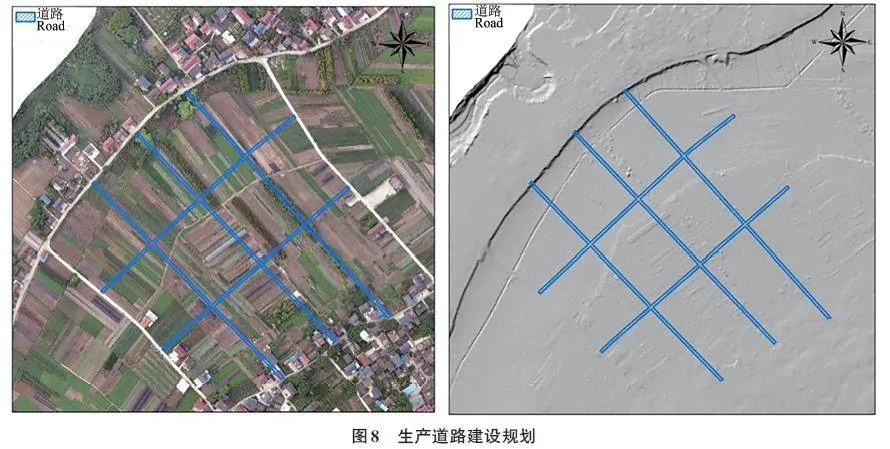
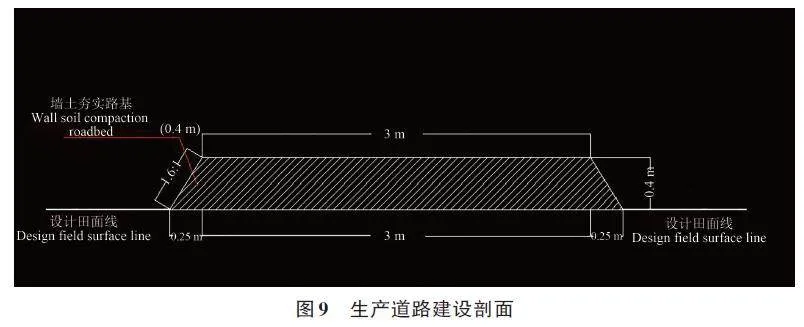
按照試驗區生產作業需要、農業機械化以及高標準農田“路網”建設要求[10?11],按照田型調整田塊劃分,結合現有農村道路聯結成網,田塊之間生產道路設計為寬3 m,路肩寬度0.25 m,高于田塊0.4 m,結果如圖8、9所示。
2.5 溝渠地形
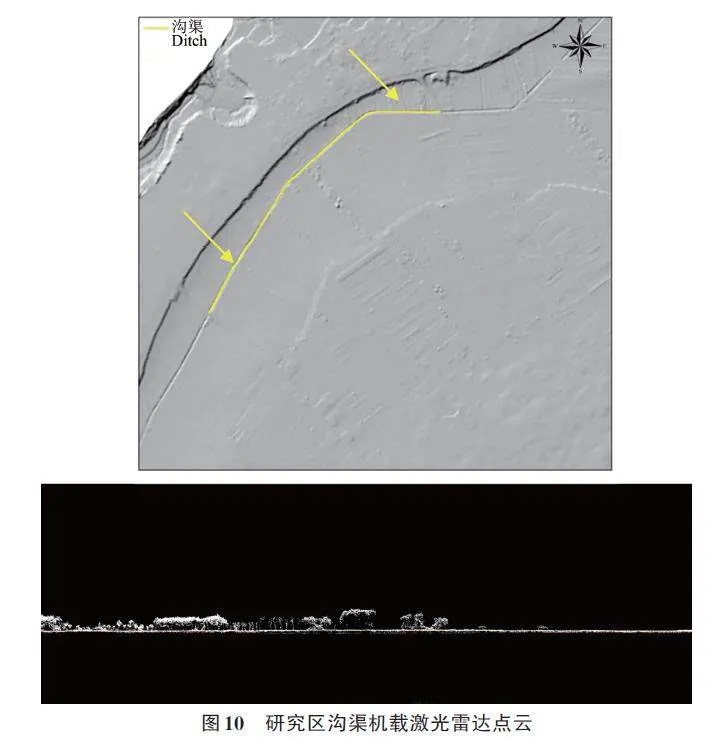
基于高精度的數字高程模型,可識別研究區內的溝渠現狀,包括溝渠走向、溝渠分布等信息,如圖10所示,圖中黃線標注為試驗區溝渠。
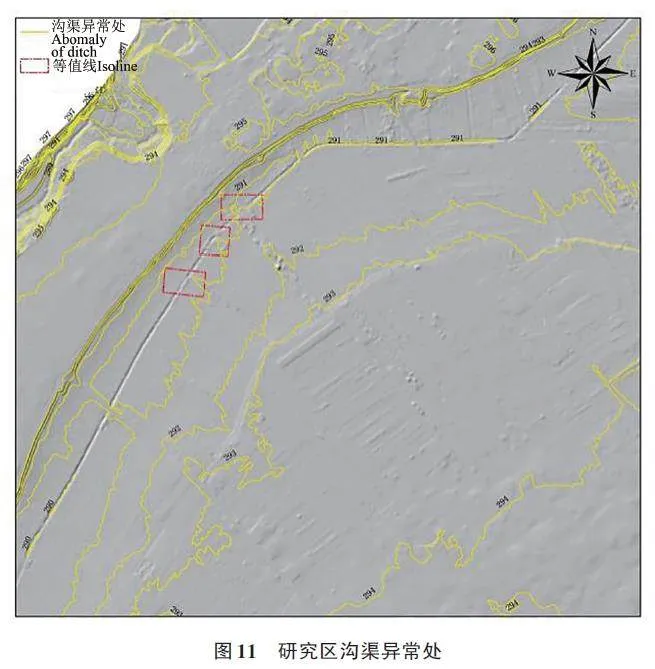
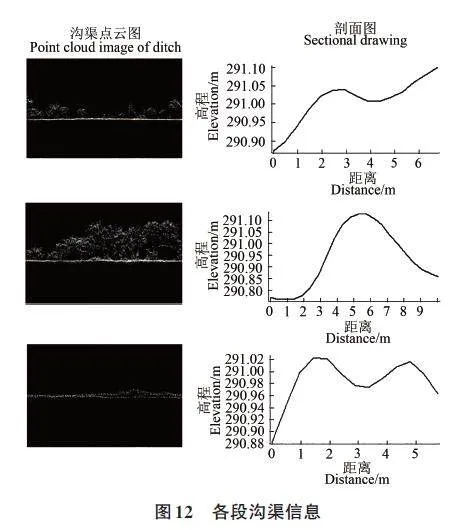
通過拉取試驗區溝渠LiDAR點云剖面線(圖11)可以看出,區域內溝渠底部基本平整且結構穩定,可用于高標準農田建設完成后農田水利灌溉工程建設;僅3處地形等高線的分布和走向存在異常。進一步對這3處等高線異常位置進行剖面分析(圖12)發現,排水渠底局部區域高程偏高、不平整,可能會導致渠道水流不貫通,后續農田水利灌溉使用之前,可針對溝渠底部隆起、凹陷等位置,采取人工配合機械設備作業及時順平和回填凸出、凹陷部位,全力保障農田溝渠水流通暢。
2.6 機耕路邊坡挖填土方量計算
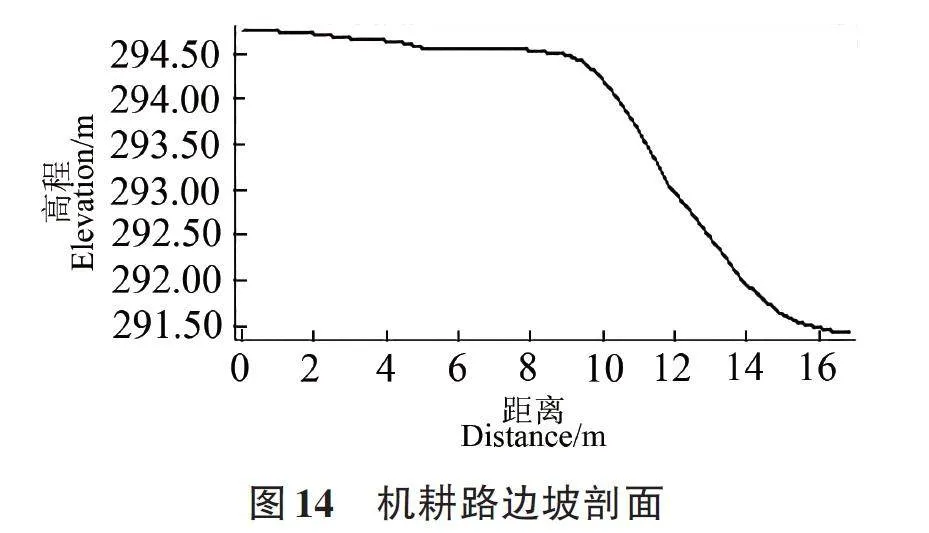
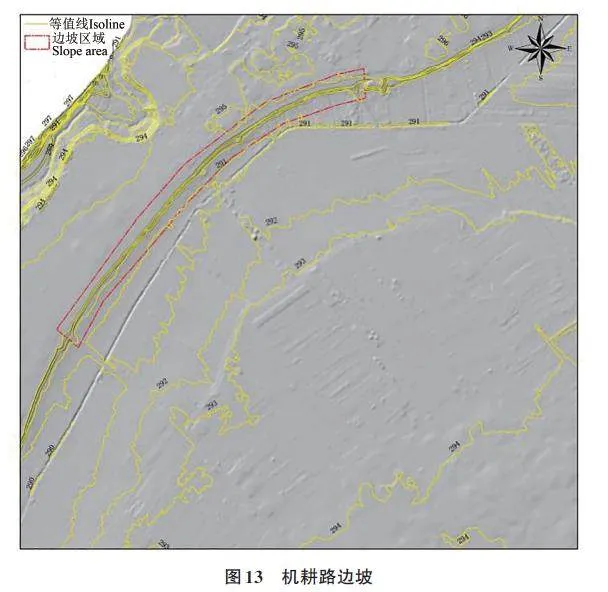
從山體地形分析(圖13、14),該研究區邊坡等高線走勢大致平滑,存在局部異常區域,如圖14中紅色剖面線所示。。
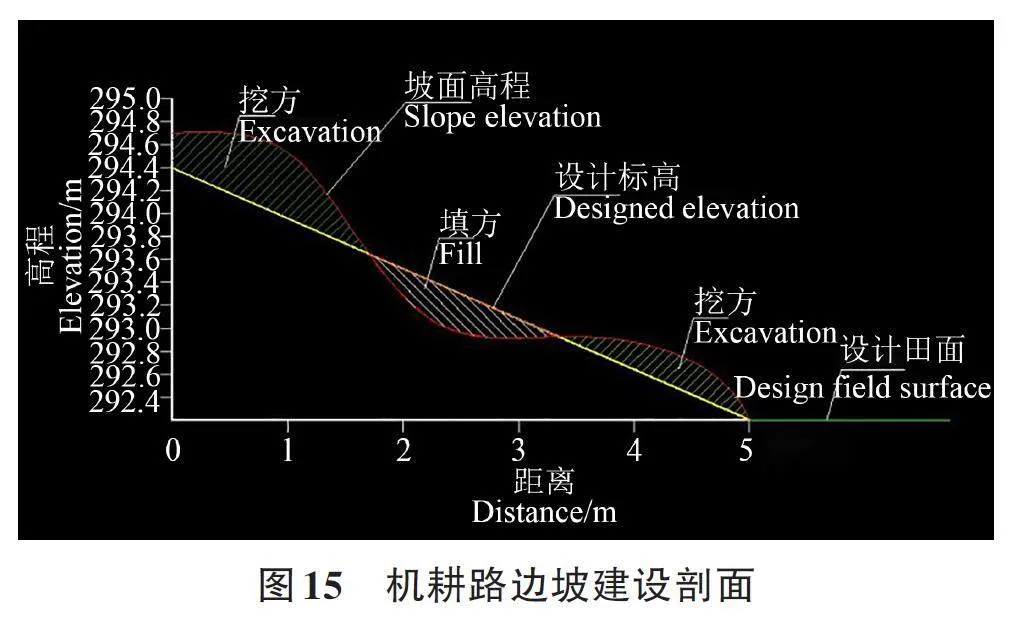
為了防止特殊邊坡走向,如路塹邊坡等對已有機耕道路邊坡和路基穩定性造成影響,對隱患邊坡行優化設計治理,及時清除坡面松動凸起石塊、回填土,治理建設設計方案如圖15所示。
2.7 田塊填挖土方量計算
2.7.1 計算方案
根據等高線基本走勢和研究區地形特點,共設計3種方案進行田塊填挖土方量計算,具體如下。
方案1:由于根據平均高程統一設計填挖后的高程,因此填方量和挖方量相等,計算公式如下。
w = s × (hx - h0 ) (1)
式中,w 為填/挖方量,s 為田塊面積,hx 為設計高程,h0 為原高程。
方案2:按照梯級設計填挖后的高程,需要根據每個梯級計算填挖方量,并累加到總的填方量和挖方量中,計算公式如下。
w1 = s1 × (h1 - h0 ) (2)
w2 = s2 × (h2 - h1 ) (3)
w3 = s3 × (ht - h2 ) (4)
wt = w1 + w2 + w3 (5)
式中,w1為第1梯級填/挖方量;w2第2梯級填/挖方量;w3第三梯級填/挖方量;wt為總的填/挖方量;s1 為第1梯級田塊面積;s2 為第2梯級田塊面積;s3 為第三梯級田塊面積;h0 為原高程;h1為第1梯級設計高程; h2 第2梯級設計高程; ht為總設計高程。
方案3:按照逐級放坡的方式設計填挖后的高程,需要計算每個梯級的填、挖方量,并累加到總的填方量和挖方量中,計算公式如下。
w1 = s1 × (h1 - h0 ) (6)
w2 = s2 × (h2 - h1 ) (7)
w3 = s3 × (h3 - h2 ) (8)
…w
n = sn × (ht - h(n - 1) ) (9)
wt = w1 + w2 + … + wn (10)
式中,w1 為第1梯級填/挖方量;w2 為第2梯級填/挖方量;w3 為第三梯級填/挖方量;wn 為第n 梯級填/挖方量;wt 為總的填/挖方量;s1 為第1梯級田塊面積;s2 為第2梯級田塊面積;s3 為第三梯級田塊面積;sn 為第n 梯級田塊面積;h0 為原高程;h1為第1梯級設計高程;h2 第2梯級設計高程;ht 為總設計高程。
2.7.2 計算結果
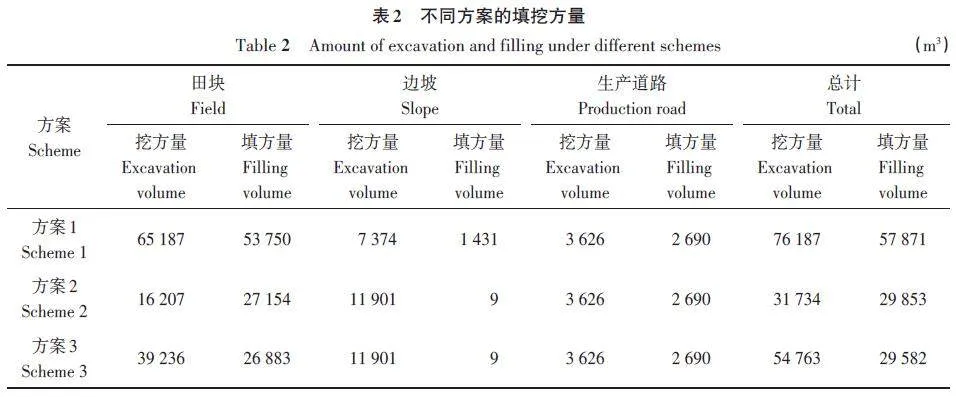
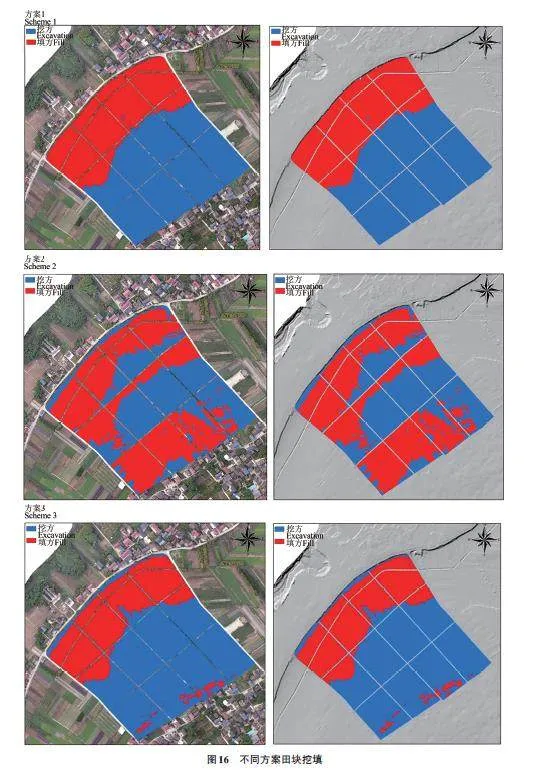
從圖16可以看出,不同方案的田塊挖填方分布不一致,方案2挖填方位置分布較零散;方案1和3相似,不同處主要集中道路邊坡位置。由表2可知,雖然方案1和3的挖填方位置分布較一致,但挖填方的量卻不同,方案1的挖填方量約為方案3挖填方量的2倍。
在邊坡挖填土方量工程中,方案2和方案3的邊坡與田塊相交處高程基本一致,故合并處理。由圖17可知,3個方案都是挖方面積大于填方面積,其中方案2和3的填方面積較小。不同方案的邊坡挖方量和填方量差距也較大,特別是方案2和3,邊坡挖方量遠大于填方量,其中填方量僅9 m3(表2)。
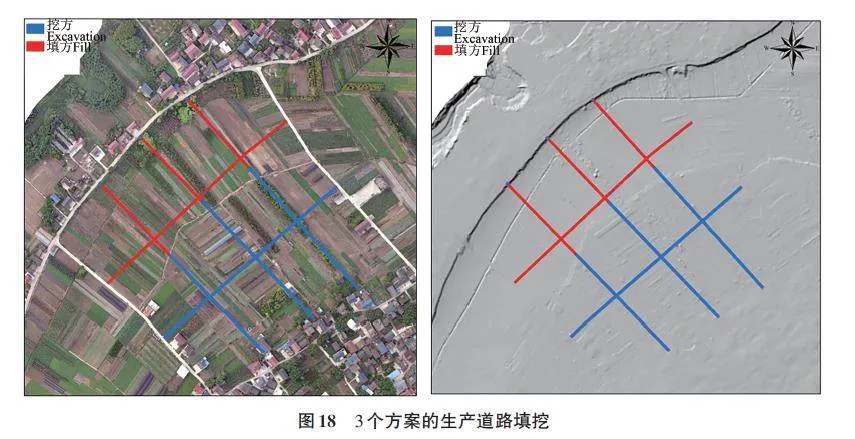
由圖18可知,由于試驗區地勢較為平坦,3個方案的生產道路挖方量均位于地勢較高處,其挖方面積大于填方面積。由表2可知,生產道路的挖方量大于填方量。
對比3種方案,方案2和3比方案1更加精準,且適用于各種復雜的地形條件,可更精確地計算填挖土方量。方案1 所需填方量最大,達53 750 m3,挖方量為65 187 m3,總計119 937 m3,其中生產道路部分只需填方1 431 m3,量較少;方案2所需填方量和挖方量相對均衡,其中填方量27 154 m3,挖方量16 207 m3,總計43 361 m3,但田塊的挖方面積較大,達11 901 m3;方案3的填方量最少,為26 883 m3,而挖方量為39 236 m3,總計66 119 m3,該方案的優勢在于能夠減少邊坡面積,從而減少填方量。因此,在選擇方案時,需要根據具體情況進行綜合考慮,包括地形復雜程度、工程規模和預算、項目時限等因素。在實際應用中,可以通過現場勘測和驗證,確保設計方案的準確性和可行性。
3 討論
目前,大多數高標準農田建設主要依靠衛星影像、無人機影像、實地量測等方法開展相關規劃工作,此類方法流程復雜、耗時耗力、精度低,極易造成前期規劃不合理。為克服上述難題,本研究利用機載激光雷達、高清影像等多源遙感數據,具有現勢性強、分辨率高、高精度三維坐標等優勢,生成高精度數字正射模型、數字高程模型等二、三維成果應用于高標準農田建設前期田塊規劃、田間道路調整、地形異常檢查、農田土地整理土方量計算等多項建設任務中,經過驗證,應用效果良好。
一方面,單獨利用衛星、無人機二維數字正射影像開展高標準農田格網劃分和田間道路整理工作,受限于影像分辨率、天氣情況以及獲取周期等,難以全面、準確地反映高標準農田建設區各農田間真實的位置關系。同時基于遙感影像透視幾何定位成像的基本工作原理,其高程精度也存在局限性。而機載激光雷達數據不僅可以提供建設區精確的平面位置,其形成的高精度數字高程模型成果還可以為地形異常處的檢查工作提供直觀可視化的現場真實地形和細微地貌等情況。另一方面,以往土地整治工作都是在現場量測,采用全野外數字化測量,測定項目的位置、形狀、面積等地籍相關要素,只能在小面積進行,難以滿足大面積區域的高效要求,易造成部分工程任務重復、浪費等現象,從而影響建設進度。而數字高程模型可為土地整治田塊的挖填方案選擇提供高精度、現勢性強的三維坐標信息,實現效率和精度的完美結合。
高標準農田是糧食安全的關鍵保障,是通過科技手段解決高標準農田建設工程實施與管理過程中存在的規劃不合理、建設浪費嚴重、建設效率低等諸多問題的重要路徑。本研究通過在試驗區的探索研究,驗證了多源時空點云融合技術在高標準農田建設規劃中應用的可行性。今后,應將機載激光雷達、無人機高清影像等現代空間技術多尺度、多角度、高精度的二、三維數據成果廣泛用于高標準農田建設工作,為國土部門農田土地整理方面提供高精度立體時空數據參考,幫助其做出科學、合理、準確的建設規劃方案,進一步保證農業再上新臺階,真正實現農業農村現代化。
在本研究的3個方案中,方案1是最簡單的方案,直接按照平均高程值設計填挖后的高程,操作簡單,但并沒有考慮到試驗區內地形的變化和不均勻性,可能會造成填挖方量的不準確;方案2則考慮到試驗區內的地形變化和不均勻性,將試驗區按照等高線走勢分成3個梯級設計填挖后的高程,相對于方案1更為精確,但是該方案在具體實施過程中可能存在一定的難度,需要對每個梯級進行精細的設計和計算,增加了工作量和難度,適合梯田式高標準農田建設;方案3則是在方案2的基礎上進一步考慮了試驗區內的最高高程和最低高程,按照等高線趨勢和設計高程值進行逐級放坡,使得設計更為合理和精確,但是該方案的計算難度相對較高,需要綜合考慮到每個梯級的長度和高差,以及每級的坡度等因素,計算工作量較大。綜合來看,方案3相對于方案1和2,具有更高的精度和合理性,但是需要付出更多的計算工作量。具體選擇哪種方案還需根據實際情況進行考慮和決策。
方案2和3的挖填方量差別較大,且方案3的方量更大。因此,在確定方案時需要綜合考慮方案的可行性、經濟性和環保性,能就地取材的盡量采用高標準農田建設區周圍或現有土壤,不僅節約成本,還保護環境、減少浪費。同時,還需要結合實際情況對方案進行調整和優化,例如對于一些高度變化較大的田塊(梯田式農田),可以采用分段填挖的方法進行設計,以減少邊坡的坡度和高度,從而減少挖填土方量,提高經濟效益和環保性。綜合考慮,試驗區高標準農田建設應該選擇方案3進行填挖土方量計算,因為它能夠在減少填方量的同時減少邊坡面積,從而降低工程成本。同時,該方案在生產道路的填方量和挖方量上也相對均衡,不會造成過多的浪費或補充需求,是最優方案。
參考文獻
[1] 新華社記者.推進農業現代化,建設農業強國[N].新華每日電訊,2023-03-19(004).
[2] 許夢夢.縣域高標準農田建設區域劃定研究——以湖北省大悟縣為例[D].武漢:華中農業大學,2022
XU M M. Study on zoning of high-standard farmland construction in county—a case study of Dawu county Hubei province [D]. Wuhan: Huazhong Agricultural University, 2022.
[3] ADMIRE M M.利用高分辨率遙感監測高標準農田:方法與機制研究[D].北京:中國地質大學,2018.
ADMIRE M M. Monitoring the usage of the high standard farmland by high resolution remote sensing: a study of methods and mechanisms [D]. Beijing: China University of Geosciences, 2018.
[4] 陳震,張耘實,陳建平,等.基于分形特征的高標準農田遙感分類方法研究[J].現代地質,2018,32(3):595-601.
CHEN Z, ZHANG Y S, CHEN J P, et al .. Remote sensing classification for high standard farmland based on fractal characteristics [J]. Geoscience, 2018, 32(3):595-601.
[5] 張華平,鄭輝.高標準農田建設土方量計算精度優化研究[J].江西測繪,2022,133(3):1-3,48.
ZHANG H P, ZHENG H. Study on optimization of earthwork calculation accuracy for high standard farmland construction [J].Jiangxi Cehui, 2022, 133(3):1-3,48.
[6] 宗銘銘.基于激光雷達點云的復雜地形DEM構建研究[D].桂林:桂林理工大學,2021.
ZONG M M. Research on the construction of complex terrain DEM based on LiDAR point cloud [D]. Guilin: Guilin University of Technology, 2021.
[7] 陳鵬,胡玉祥,尹相寶,等.土石方工程多手段測量及計算方法對比分析[J].測繪與空間地理信息,2022,45(11):213-216.
CHEN P, HU Y X, YIN X B, et al .. Comparative analysis of multi-means measurement and calculation methods in earthwork engineering [J]. Geomat. Spat. Inform. Technol.,2022, 45(11):213-216.
[8] 柳克松.無人機激光點云礦區土方量計算系統的設計與開發[J].科技與創新,2023(4):94-96.
[9] 劉志寬.航道疏浚及后方陸域景觀帶土方平衡計算[J].港口科技,2022(7):34-38.
[10] 嚴之堯,吳海洋,范樹印,等. 高標準農田建設通則:GB/T30600—2014 [S].北京:標準出版社,2014.
[11] 中華人民共和國國土資源部.高標準基本農田建設標準:TD/T 1033—2012 [S].北京:標準出版社,2012.
基金項目:四川省自然資源廳科研項目(KJ-2023-002);自然資源部科技項目(102121212040070009002)。