市政道路智能管理系統構建及車流量預測模型研究
2024-12-31 00:00:00周宗凱
西部交通科技 2024年9期
關鍵詞:模型
作者簡介:
周宗凱(1974—),工程師,主要從事高速公路監理工作。
摘要:為了提升市政主干道的通行效率,緩解市政交通擁堵程度,實現市政道路的智能管理,構建市政道路智能管理系統,文章利用GraphSAGE聚合算法對圖卷積網絡進行改進,同時引入注意力機制來計算鄰居節點的權重系數,完成對次要數據信息的篩除,簡化了圖卷積網絡的處理過程;構建了包括2圖卷積網絡層+2門控循環單元層+1全連接層的車流量預測模型。該模型較GCN-LSTM模型、GCN模型、GRU模型和LSTM模型的預測精度分別提升了17.4%、39.2%、42.1%和51.8%,具有較高的預測精度和穩定性,可全面提升系統的管理效率。
關鍵詞:市政道路智能管理系統;GraphSAGE聚合算法;圖卷積網絡;注意力機制;車流量預測模型
中圖分類號:U491.1+4文獻標識碼:A 60 198 4
0 引言
隨著經濟社會發展,城市道路車流量逐年增加,導致許多城市出現了極為嚴重的交通擁堵情況,給人們的出行帶來很多不便[1-2]。傳統的道路誘導一般采用信號燈或者限號方式來進行控制,這種方法雖然簡單,但已經不能滿足復雜市政道路的現代化管理,有必要根據交通流現狀設計市政道路智能管理系統來實現路網交通的有效疏導和協同管理,幫助管理人員對路網實現精準管控[3-5]。
計算機技術和通信技術的快速發展,為建立高效智能化的路網管理系統提供了可能。通過數據挖掘技術和各種機器學習模型,開展對交通標志的識別、車輛的檢測、行人的檢測等研究,極大地提升了交通系統的安全性和舒適性,尤其是通過遺傳算法來解決復雜路徑的車輛協調問題,很大程度上緩解了交通擁堵問題。在智能交通系統中,交通流預測是最為重要的組成部分,其發展對于交通管理系統的使用效率具有決定性的意義。當前,用于交通流預測的模型或者方法有許多,如卷積神經網絡法(CNN)、圖卷積網絡法(GCN)、長短時記憶法(LSTM)等,其中GCN法更側重于交通流的空間特征[6-8],LSTM法更側重于交通流的時間特征,因此,很多時候將兩種方法進行融合,即采用GCN-LSTM對交通流進行預測[9-10]。但該計算過程較為復雜,不易操作,有必要對現有交通流預測方法進行改進。
本文提出利用GraphSAGE聚合算法對圖卷積網絡進行改進,同時引入注意力機制來計算鄰居節點的權重系數,構建市政道路智能管理系統和車流量預測模型,以期能為緩解交通擁堵問題提供借鑒。
1 道路智能管理系統構建
1.1 系統功能需求
為了實現市政道路的智能管理,系統必須具備如下功能:(1)電子地圖的實時顯示,能夠對每條路段的預測結果進行展示,并不斷更新;(2)路網視頻實時監控,對每個路口的交通狀況和網絡攝像頭的工作狀態進行監測;(3)交通信息查詢,可以向管理人員提供各路段的交通流信息數據查詢服務;(4)信號燈同步配時,根據交通流預測結果,當路口信號燈出現配時不合理情況時,系統可以自動調整該路口的信號燈配時。
1.2 系統開發環境
系統硬件平臺處理器選用Intel(R)Core(TM)i7-9750HCPU@2.60 GHz,內存大小為16 GB,圖形處理器選用NVIDIA GeForce RTX 2060,操作系統為Windows10。系統軟件平臺開發框架為PyQt5,開發工具為PyCharm,開發語言為Python,操作工具為Qt Designer和Navicat Premium,數據庫選用MYSQL。
1.3 系統結構設計
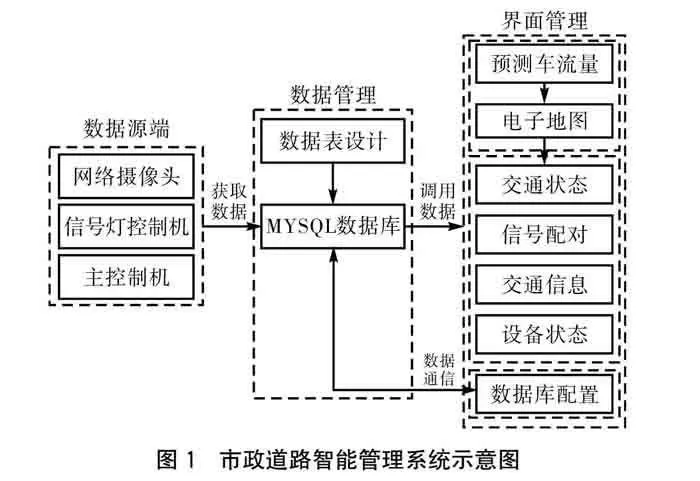
根據系統功能需求,構建市政道路智能管理系統,見圖1。系統由數據源端、數據管理以及界面管理三部分組成。
數據源端主要包括信號燈控制機、網絡攝像頭和主控制機,其中網絡攝像頭負責對車流量數據進行獲取,然后經過信號燈控制機和主控制機處理后將數據信息傳
遞給MYSQL數據庫;數據管理主要是以MYSQL數據庫為核心的存儲和管理結構;在界面管理中主要劃分為3個部分,第一部分為車流量預測和電子地圖顯示界面,第二部分為交通狀態、信號配時、交通信息和設備狀態4個功能的數據信息管理界面,第三部分為數據庫配制管理界面。在整個系統中,預測車流量是最關鍵的步驟,是實現系統功能的前提。
2 系統車流量預測算法設計
2.1 圖卷積網絡優化算法
市政道路智能管理系統構建及車流量預測模型研究/
周宗凱
傳統卷積神經網絡(CNN)只能處理平移不變性的數據,但是對于市政交通流來講具有拓撲結構關系(時空性)。為了處理這種拓撲結構關系圖上節點之間的相互依賴關系,提出利用圖間距網絡來解決拓撲結構的計算問題。然而圖卷積網絡需要在全圖上進行計算,當數據節點較多,每一層節點在進行聚合操作時,由于梯度更新速度慢,且存在數據節點的重復計算,容易導致計算效率降低,浪費大量的計算資源和時間。為提升圖卷積網絡的計算效率,本文提出利用GraphSAGE聚合算法對圖卷積網絡進行改進(GCN算法)。GCN算法的核心思想為:對聚合函數的聚合鄰居節點進行訓練,將傳統的圖卷積網絡學習轉換為歸納學習,從而完成對未知節點的泛化作用,減少后續計算時間。GCN算法表達式為:
hlN(v)=aggregatelhl-1vi
(1)
hlv=σWl·concathl-1v,hlN(v)
(2)
式中:hlN(v)——目標節點v在第l層所有鄰居節點的采樣特征值;
N(v)——目標節點v所有鄰居節點的集合;
aggregatel——第l個聚合器;
hlv、hl-1v——目標節點在第l、l-1層的特征值;
σ——sigmoid激活函數;
Wl——拼接后數據在第l圖卷積層中的比重;
concat——將前后兩層采樣聚合后的特征值進行拼接。
2.2 圖數據注意力機制
人們在處理信息數據時總會有選擇性地忽視一些次要信息,這樣可以大大提升對信息的處理效率。為了進一步提升圖卷積網絡的處理效率,在GCN算法基礎上,繼續引入圖數據的注意力機制(GAT)。在路網結構中,車流量越大,則目標節點與鄰居節點之間的注意力系數越大,也可稱之為權重系數,鄰居節點v到vi的權重系數可表示為:
eviv=LeakyReLUWlhlvi‖Wlhlv
(3)
式中:eviv ——權重系數;
LeakyReLU——圖卷積網絡的激活函數。
為了使權重分配更加合理,對所有鄰居計算得到的系數進行softmax歸一化處理,從而使所有鄰居的權重系數之和為0,歸一化處理后的權重系數為:
αviv=softmaxeviv=expeviv∑vi∈Nviexpeviv
(4)
根據注意力機制加權之后的目標節點v的特征值可表示為:
hlv=σWl·concathl-1v,∑vi∈Nviαvivhlvi
(5)
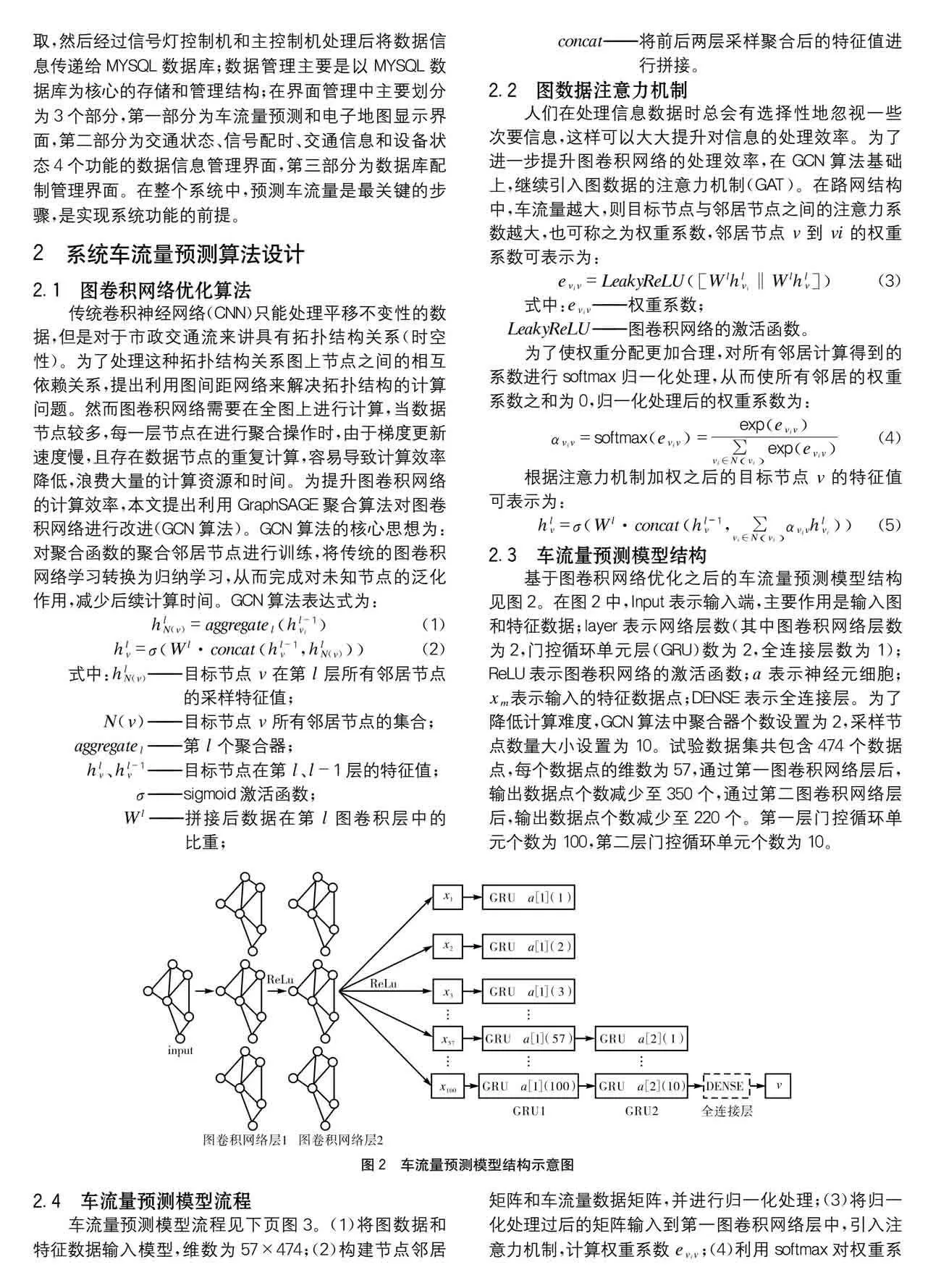
2.3 車流量預測模型結構
基于圖卷積網絡優化之后的車流量預測模型結構見圖2。在圖2中,Input表示輸入端,主要作用是輸入圖和特征數據;layer表示網絡層數(其中圖卷積網絡層數為2,門控循環單元層(GRU)數為2,全連接層數為1);ReLU表示圖卷積網絡的激活函數;a表示神經元細胞;xm表示輸入的特征數據點;DENSE表示全連接層。為了降低計算難度,GCN算法中聚合器個數設置為2,采樣節點數量大小設置為10。試驗數據集共包含474個數據點,每個數據點的維數為57,通過第一圖卷積網絡層后,輸出數據點個數減少至350個,通過第二圖卷積網絡層后,輸出數據點個數減少至220個。第一層門控循環單元個數為100,第二層門控循環單元個數為10。
2.4 車流量預測模型流程
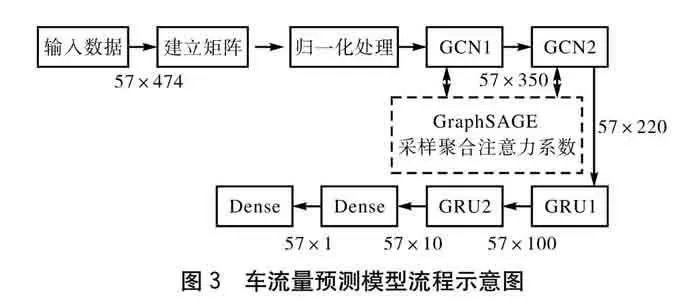
車流量預測模型流程見下頁圖3。(1)將圖數據和特征數據輸入模型,維數為57×474;(2)構建節點鄰居矩陣和車流量數據矩陣,并進行歸一化處理;(3)將歸一化處理過后的矩陣輸入到第一圖卷積網絡層中,引入注意力機制,計算權重系數eviv;(4)利用softmax對權重系數eviv進行歸一化處理,得到αviv;(5)選擇加和聚合算子,得到聚合后的一階鄰居節點特征,此時數據維數為57×350;(6)將一階鄰居節點經過Relu變換后輸入到第二圖間距網絡層中,重復(3)~(5)步驟,得到二階鄰居節點特征,此時數據維數為57×220;(7)將節點特征經Relu變換后輸入到GRU1層中,此時數據維數為57×100,將GRU1層的輸出數據作為GRU2層的輸入數據,此時數據維數為57×10;(8)將經過GRU2層的數據作為全連接層的輸入數據,最終得到模型預測結果y(數據維數為57×1)。
3 系統應用效果
3.1 應用背景
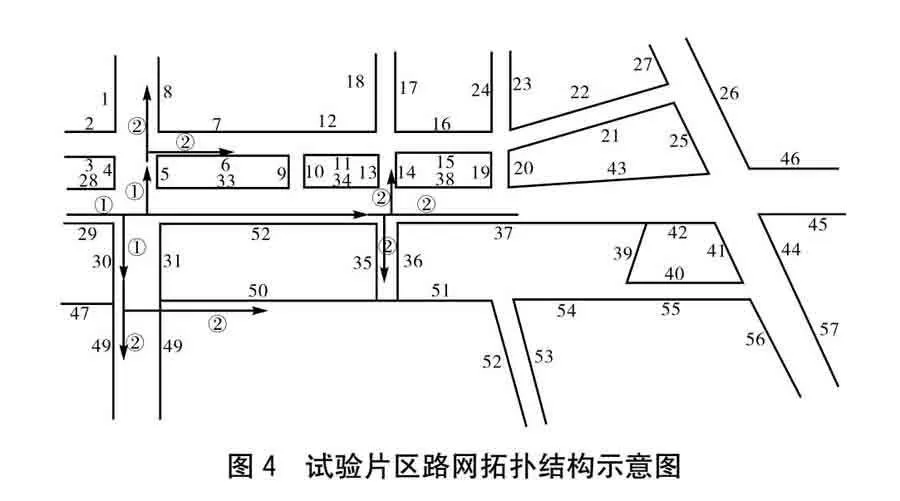
某片區共有57條路和16個路口,為便于觀察,對片區內所有路和路口進行了編號,見圖4。以每10 min為一個周期數據點,對該路段進行了連續10 d的監測,每天監測時間為8:30-21:30,然后取前6 d的車流量數據作為訓練集,第7~8 d的車流量數據作為驗證集,第9~10 d的車流量數據作為測試數據集。將測試得到的數據構造為特征數據集,并隨監測圖像一起輸入到系統中。
3.2 預測模型訓練參數
在訓練過程中加入正則化項,以防止模型在訓練過程中出現過度擬合問題。初始學習率設置為0.1,權重衰減值設置為5×10-4,訓練次數為200次。為了使訓練過程更加高效化,使用adam優化器對模型網絡進行優化。該優化器可以自動調整學習速率,使學習速率始終保持在合理范圍內,同時具有計算速度快、對內存要求低的特點。
3.3 評價指標
為了驗證本文提出的車流量預測模型所具備的良好預測性能,選擇GCN模型、GRU模型、LSTM模型和GCN-LSTM模型與本文提出車流量預測模型的預測效果進行對比,主要對比評價指標包括損失值(LOSS)和準確率(ACC)。具體計算式為:
LOSS=1M∑Mi=1xi-xi∧
(6)
ACC=1-1M∑Mi=1xi∧-xixi×100%
(7)
式中:M——樣本數據點數量;
xi——第i路段的車流量真實值;
xi∧——第i路段車流量模型預測值。
3.4 系統預測結果
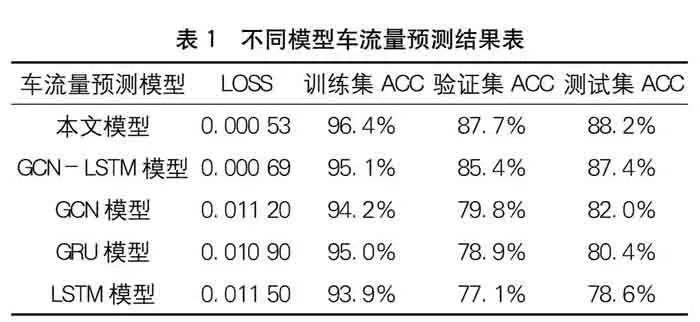
不同模型車流量預測結果見表1。由表1可知,對于模型預測損失值而言:LSTM模型gt;GCN模型gt;GRU模型gt;GCN-LSTM模型gt;本文模型;對于訓練集ACC而言:本文模型gt;GCN-LSTM模型gt;GRU模型gt;GCN模型gt;LSTM模型;對于驗證集ACC和測試集ACC而言:本文模型gt;GCN-LSTM模型gt;GCN模型gt;GRU模型gt;LSTM模型。這表明,本文模型的預測性能最佳,不僅具有較高的穩定性,而且測試集ACC較GCN-LSTM模型、GCN模型、GRU模型、LSTM模型分別提高了0.8%、6.2%、7.8%和9.6%。
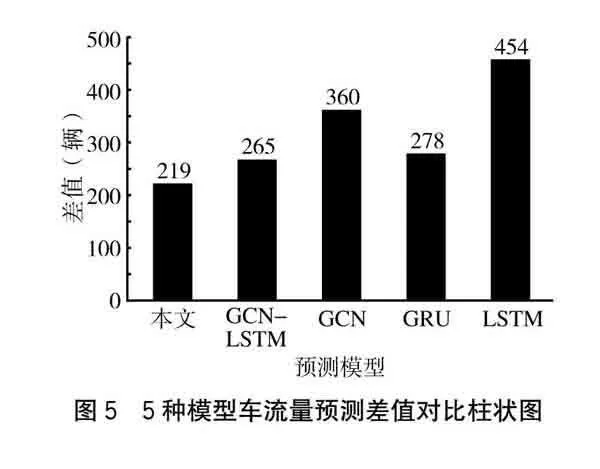
由于包含了57條路段的車流量信息,對每一條路段的預測結果進行分析不太現實,故將每種模型預測結果與實際車流量的差值進行疊加,得到5種模型的車流量預測差值對比情況(見圖5)。由圖5可知:在57條路段中,采用本文預測模型差值僅為219,而采用GCN-LSTM模型、GCN模型、GRU模型和LSTM模型的差值分別達到了265、360、378和454,本文預測模型差值分別較后面4種模型降低17.4%、39.2%、42.1%和51.8%,這說明本文提出的車流量預測模型預測精度要優于其他傳統模型,更加適用于市政道路路網的車流量預測。
4 結語
(1)本文構建了市政道路智能管理系統,該系統包括數據源端、數據管理以及界面管理三部分,預測車流量的準確程度是實現系統功能的關鍵。
(2)提出利用GraphSAGE聚合算法對圖卷積網絡進行改進,并引入注意力機制來簡化計算過程,得到車流量預測模型。該模型由2圖卷積網絡層+2門控循環單元層+1全連接層構成。
(3)本文提出的車流量預測模型較傳統模型具有更高的穩定性,車流量預測誤差僅為0.000 53,預測模型差值分別較GCN-LSTM模型、GCN模型、GRU模型和LSTM模型降低17.4%、39.2%、42.1%和51.8%,具有更高的預測精度,更加適用于市政道路路網的車流量預測,可以顯著提升系統的管理效率。
參考文獻
[1]岳 昊,任孟杰,楊子玉,等.考慮擁堵空間排隊與溢出的道路網靜態交通流分配[J].中國公路學報,2022,35(7):241-250.
[2]馮海霞,王 琦,楊立才,等.擁堵環境下道路交通對城市空氣質量的影響[J].山東大學學報(工學版),2021,51(1):128-134.
[3]滕 威.城市智能交通管理系統開發與實現[J].微型電腦應用,2020,36(9):166-169.
[4]史 琳,林山君,曹衍龍,等.基于5G網絡的道路智能感知管理系統[J].自動化技術與應用,2022,41(5):92-96.
[5]楊凝紫.基于道路智慧養護管理系統支持的高速公路惡劣天氣保通工作模式的創新與實踐[J].城市公共交通,2020(5):25-28.
[6]殷 齊,丁 飛,朱 躍,等.基于CNN與多尺度特征融合的城市交通流預測模型[J].計算機技術與發展,2022,32(10):175-181.
[7]侯 越,韓成艷,鄭 鑫,等.基于時空融合圖卷積的交通流數據修復方法[J].浙江大學學報(工學版),2022,56(7):1 394-1 403.
[8]宋維凱,張洪海,萬俊強,等.基于動態時間規整和長短期記憶的空中交通流量短期預測[J].科學技術與工程,2022,22(25):11 256-11 261.
[9]王德廣,張軼楠.基于多種模型組合的短時交通流預測[J].微型電腦應用,2022,38(3):130-133.
[10]張 陽,胡 月,陳德旺,等.基于GCN-BiLSTM的短時交通流預測模型[J].武漢理工大學學報(交通科學與工程版),2023(5):802-806.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19