汽輪機調(diào)速系統(tǒng)低頻振蕩特性與抑制策略研究
2024-12-17 00:00:00劉宗強
中國新技術(shù)新產(chǎn)品
2024年7期
關(guān)鍵詞:汽輪機
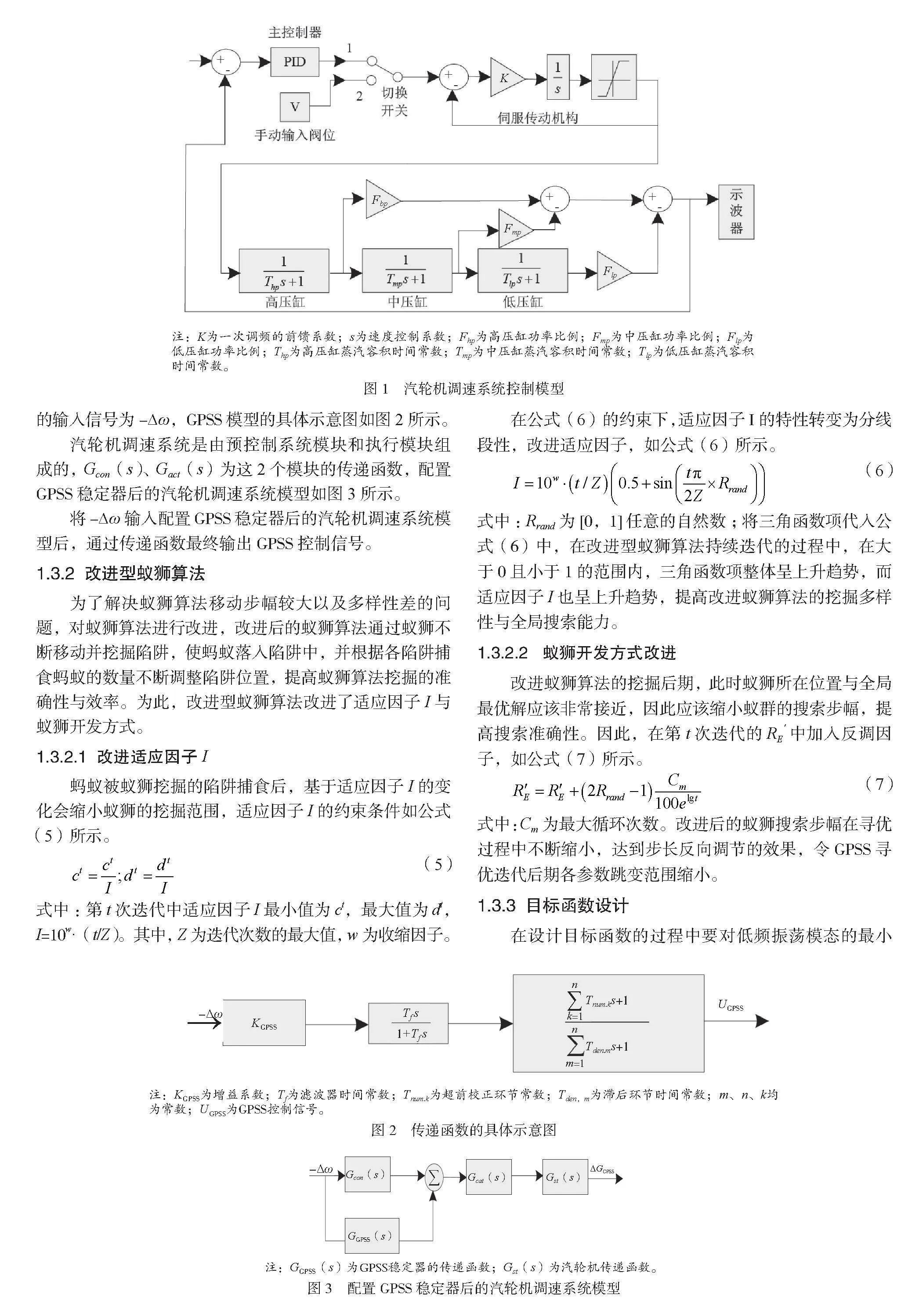
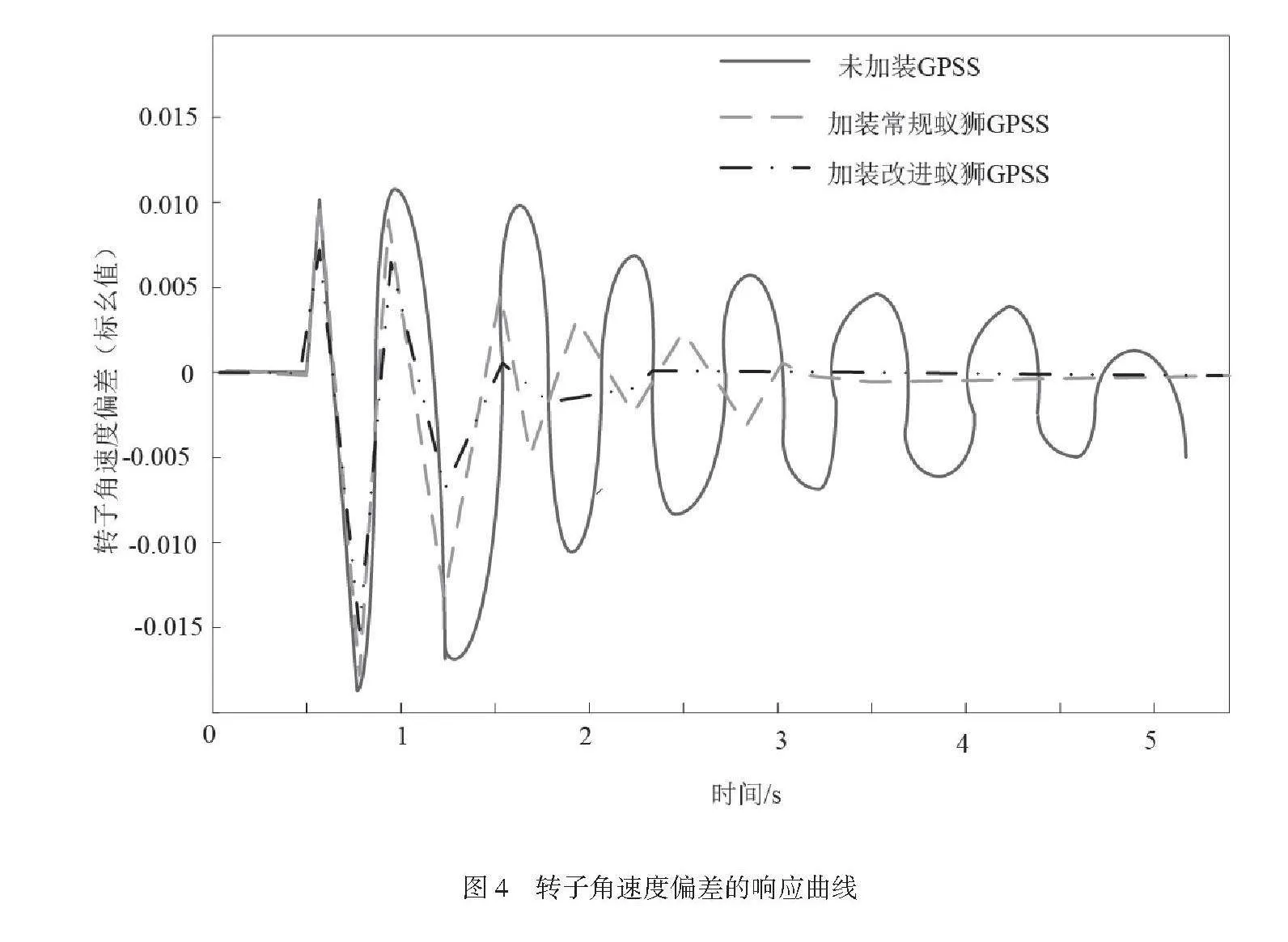


摘 要:本文研究汽輪機調(diào)速系統(tǒng)低頻振蕩特性與抑制策略,保證汽輪機調(diào)速系統(tǒng)的穩(wěn)定性。分析汽輪機調(diào)速系統(tǒng)低頻振蕩的共振原理,探究其低頻振蕩特性;汽輪機調(diào)速系統(tǒng)控制模型,對低頻振蕩進行控制;基于改進蟻獅算法的GPSS參數(shù)優(yōu)化流程,找出最優(yōu)GPSS配置參數(shù),便于從汽輪機調(diào)速側(cè)快速抑制振蕩。試驗表明,該方法能夠增強汽輪機調(diào)速系統(tǒng)阻尼特性,快速抑制轉(zhuǎn)子角速度偏差幅度,提高汽輪機調(diào)速系統(tǒng)穩(wěn)定性。
關(guān)鍵詞:汽輪機;調(diào)速系統(tǒng);低頻振蕩特性;抑制策略;蟻獅算法;GPSS配置
中圖分類號:TM 712" " " " " 文獻標(biāo)志碼:A
汽輪機調(diào)速系統(tǒng)出現(xiàn)低頻振蕩現(xiàn)象會危及整個運行機組的安全,影響系統(tǒng)工作。如果電力系統(tǒng)的穩(wěn)定性遭到破壞,那么會導(dǎo)致一個甚至多個地區(qū)停電,影響人們的日常生活,也會對國民經(jīng)濟造成巨大損失[1]。低頻振蕩抑制策略始終都是研究人員的重點研究對象。在低頻振蕩機制中,負(fù)阻尼機制是最早提出的振蕩原因,但是在實際應(yīng)用中,負(fù)阻尼機制不能很好地解釋低頻振蕩現(xiàn)象[2]。另一個低頻振蕩機制是當(dāng)汽輪機調(diào)速系統(tǒng)固有的低頻振蕩頻率和電力系統(tǒng)的自然振蕩頻率保持一致時引發(fā)的共振機制[3]。為此研究汽輪機調(diào)速系統(tǒng)低頻振蕩特性與抑制策略,在汽輪機調(diào)速系統(tǒng)中加裝參數(shù)優(yōu)化后的GPSS,增強阻尼特性,抑制低頻振蕩。
1 汽輪機調(diào)速系統(tǒng)低頻振蕩特性與抑制策略
1.1 低頻振蕩的共振機理
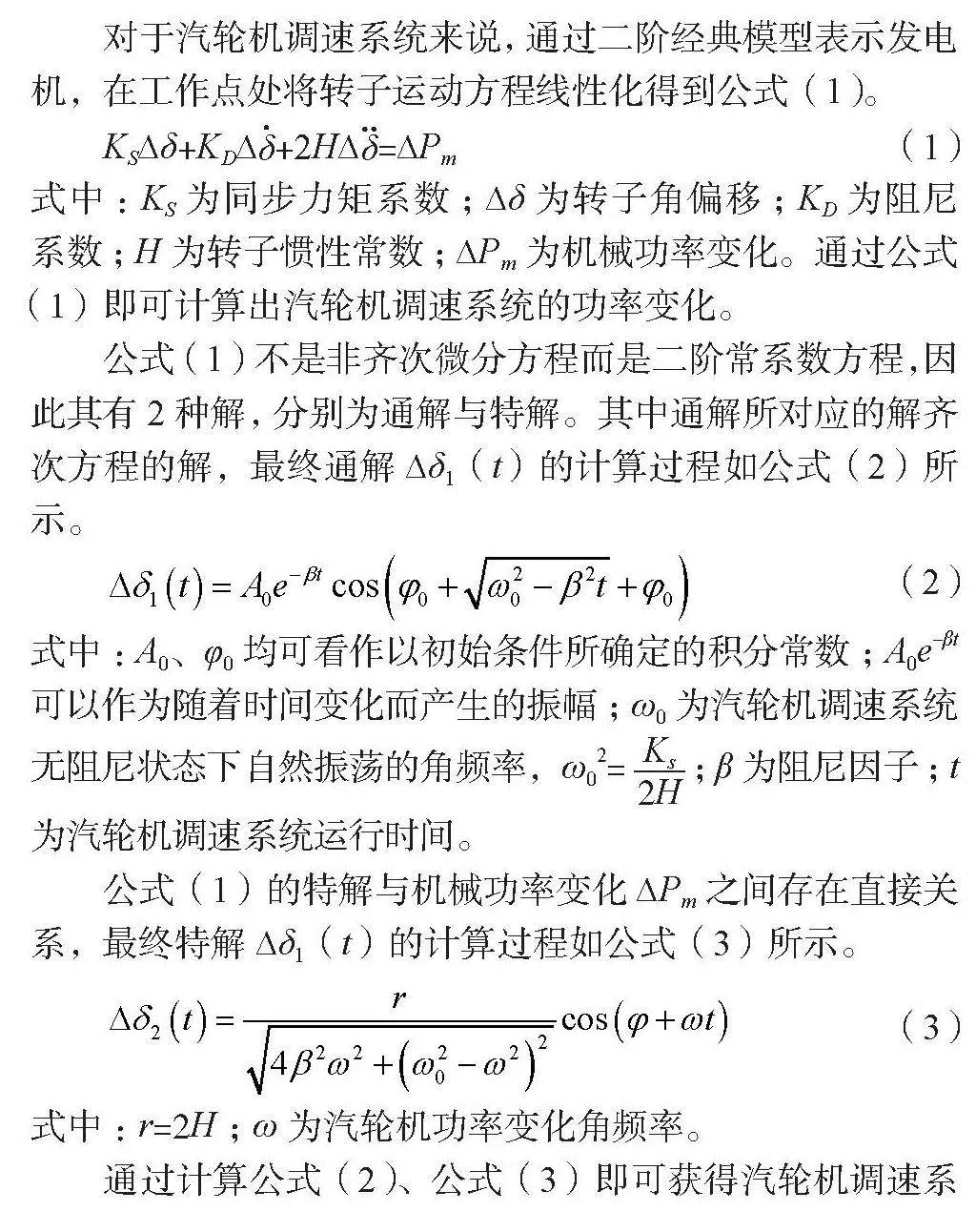
對于汽輪機調(diào)速系統(tǒng)來說,通過二階經(jīng)典模型表示發(fā)電機,在工作點處將轉(zhuǎn)子運動方程線性化得到公式(1)。……
登錄APP查看全文
猜你喜歡
能源工程(2021年3期)2021-08-05 07:25:58
能源工程(2020年5期)2021-01-04 01:29:00
電子制作(2019年22期)2020-01-14 03:16:38
廣西電力(2016年4期)2016-07-10 10:23:38
工業(yè)設(shè)計(2016年4期)2016-05-04 04:00:23
當(dāng)代化工研究(2016年7期)2016-03-20 16:21:50
電測與儀表(2015年11期)2015-04-09 11:46:40
機械制造與自動化(2014年1期)2014-03-01 04:21:47
河南科技(2014年24期)2014-02-27 14:19:40
河南科技(2014年11期)2014-02-27 14:09:55