淺談海洋調(diào)查中的水下機(jī)器人避障技術(shù)
2024-12-17 00:00:00耿成園張亞念羅賢虎陳君賢陳萍
中國(guó)新技術(shù)新產(chǎn)品
2024年7期
摘 要:水下機(jī)器人在海洋調(diào)查、能源開發(fā)中的作用十分重要。本文通過多傳感器信息融合技術(shù),利用視覺傳感器、水聲定位系統(tǒng)、聲吶傳感器、慣性測(cè)量單元和水溫水壓傳感器采集水下機(jī)器人的數(shù)據(jù),進(jìn)行信息融合。基于卡爾曼濾波方法,判斷水下機(jī)器人的周圍環(huán)境,修改運(yùn)動(dòng)軌跡,躲避障礙物,使水下機(jī)器人在海洋中能夠自動(dòng)避障。
關(guān)鍵詞:海洋調(diào)查;多傳感器融合;水下機(jī)器人;避障
中圖分類號(hào):TP 249" " " " " " " 文獻(xiàn)標(biāo)志碼:A
海洋面積約占地球總面積的70%,海洋中資源豐富,但是海洋中的環(huán)境復(fù)雜多變,海洋開采主要集中在淺海區(qū)域,目前的探測(cè)手段不足以開采更深的區(qū)域、獲得更多的能源,因此,有必要研究水下調(diào)查的海洋設(shè)備。
水下機(jī)器人(Autonomous Underwater Vehicle,AUV)融合人工智能、自動(dòng)控制、模式識(shí)別、信息整合以及系統(tǒng)集成等技術(shù),通過遠(yuǎn)程遙控或自主操作,作為一個(gè)工作載體代替真人完成各種高難度的水下作業(yè)任務(wù)[1-3]。水下機(jī)器人廣泛應(yīng)用于海洋探測(cè)、深海打撈和石油勘測(cè)等領(lǐng)域。海洋環(huán)境復(fù)雜多變,單一的傳感器無(wú)法完成高精度自主導(dǎo)航的任務(wù),需要融合多種傳感器獲得更精準(zhǔn)的數(shù)據(jù)。
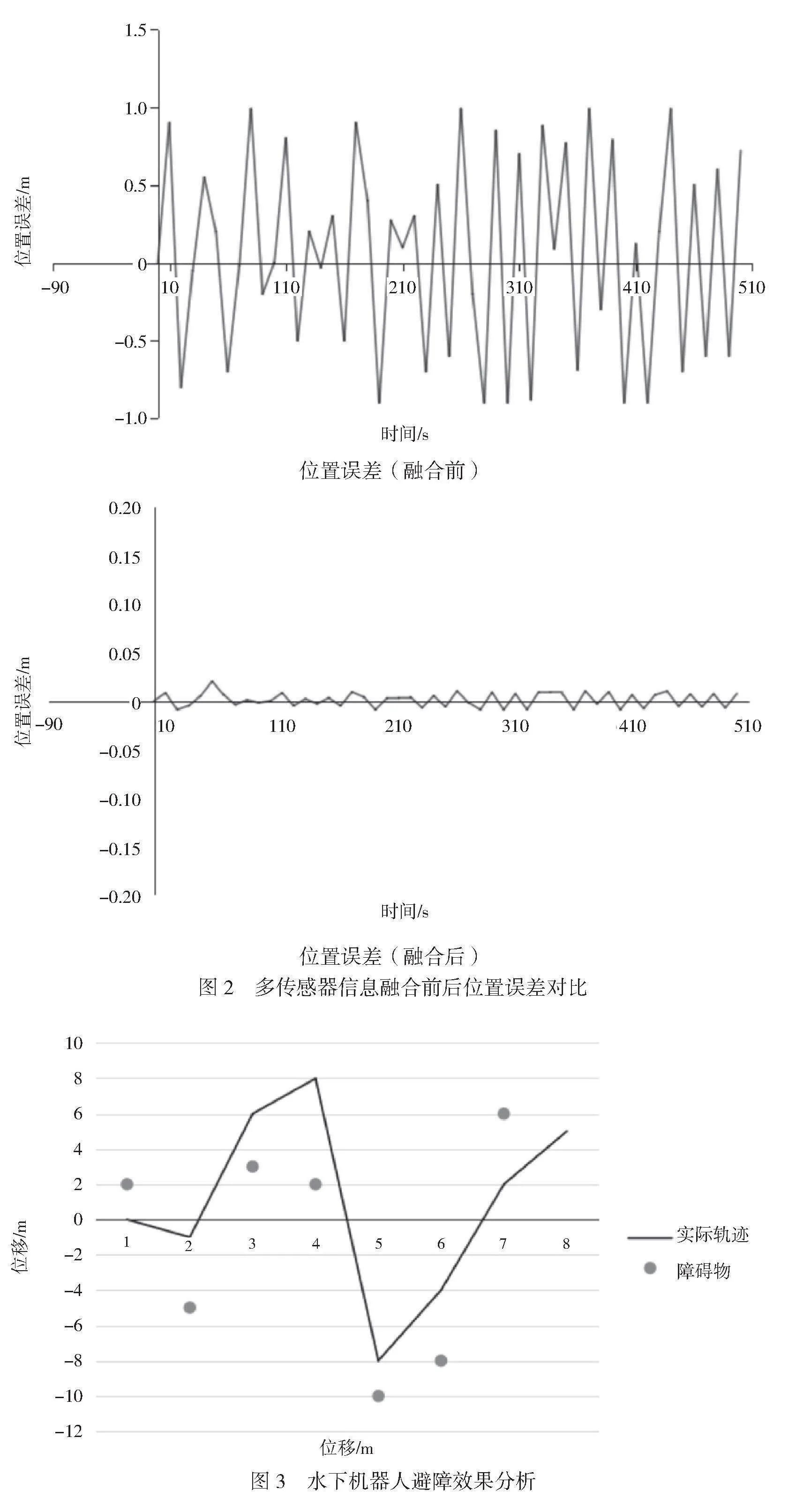
本文設(shè)計(jì)多傳感器信息融合試驗(yàn),測(cè)試水下機(jī)器人的位置誤差、運(yùn)動(dòng)軌跡以及避障性能,驗(yàn)證系統(tǒng)的應(yīng)用效果,研究水下機(jī)器人的自動(dòng)避障技術(shù)。
1 多傳感器信息融合采集模塊設(shè)計(jì)
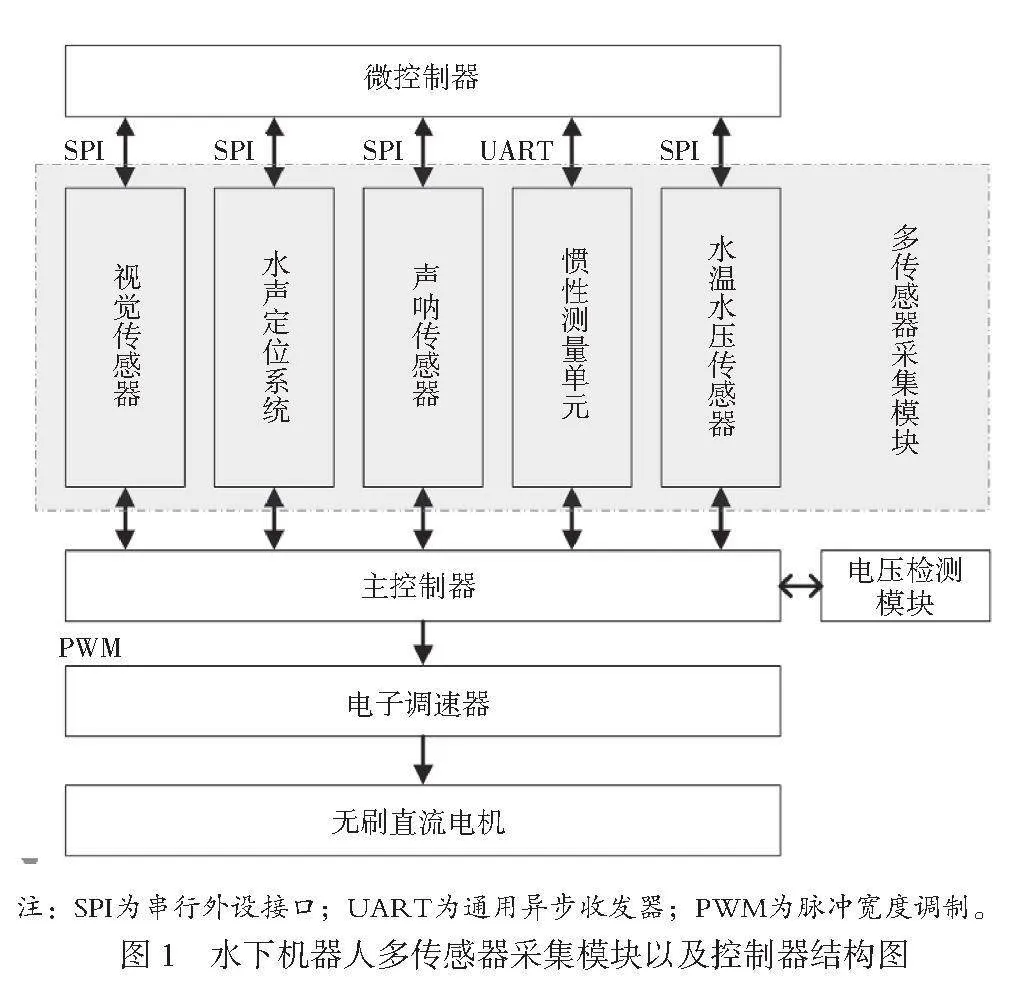
水下機(jī)器人多傳感器信息融合采集技術(shù)是利用多傳感器進(jìn)行數(shù)據(jù)采集、整合和處理的技術(shù)。在工作過程中,將獲得的多傳感器數(shù)據(jù)實(shí)時(shí)發(fā)送至水下機(jī)器人的主控制器,對(duì)機(jī)器人進(jìn)行閉環(huán)運(yùn)動(dòng)控制,提高了機(jī)器人的感知能力、定位精度和環(huán)境建模能力。……
登錄APP查看全文