智能安防巡檢機器人監控系統關鍵技術研究
2024-12-17 00:00:00劉湘黔劉海妹常浩
中國新技術新產品 2024年7期

摘 要:在當今社會,安防需求不斷升級,傳統巡檢手段難以難以符合高效、智能監控的要求。智能安防巡檢機器人具備自主感知、巡檢高效和可遠程操控等特點,逐漸成為解決方案之一。本文研究智能安防巡檢機器人監控系統的關鍵技術,通過構建穩定性測試平臺,以機器人操作系統(ROS)系統為基礎,全面評估機器人在巡檢任務中的性能。試驗結果表明,該系統表現出色,為智能安防領域提供了一套高效、可靠的監控系統。
關鍵詞:智能安防;巡檢機器人;監控系統
中圖分類號:TP 399" " 文獻標志碼:A
隨著科技迅速發展,智能安防系統在保護人們生命財產安全方面發揮了越來越重要的作用[1]。智能安防巡檢機器人以其卓越的自主性、高效的巡檢能力和靈活的應用性逐漸成為引領安防技術的關鍵力量。隨著城市化進程加速和社會安全問題多樣化,傳統的安防巡檢手段已經難以滿足復雜多變的安全需求[2-3]。智能安防巡檢機器人監控系統具備先進的傳感器技術,能夠高效感知周圍環境,實時獲取信息。在此基礎上,機器人能夠通過自主建圖技術更智能地規劃巡檢路徑,快速響應各類任務。機器人不僅在日常安防巡檢中發揮作用,還具備應變能力,能夠應對突發事件。本文研究智能安防巡檢機器人監控系統的關鍵技術,旨在通過深入探討硬件平臺、自主建圖、路徑規劃和安防巡檢等關鍵技術,提高系統的智能化水平。本研究的目的是為智能安防巡檢機器人監控系統的應用提供更完善、可行的解決方案,推動智能安防技術不斷發展,為人們創造更安全、智能的社會環境。
1 硬件設計
1.1 機器人平臺
為了保證智能安防巡檢機器人平臺具有足夠的穩定性和機動性,用DJI RoboMaster S1作為底盤平臺。該底盤配備了全向輪,操控靈活,內置的陀螺儀和加速度計保證其穩定性,模塊化設計便于后續升級和定制[4-5]。使用 Velodyne VLP-16 LiDAR 傳感器進行 360°激光掃描,其作用是構建地圖和感知環境。使用SICK LMS511激光雷達,提供更高分辨率的目標檢測和避障功能。使用FLIR Boson系列紅外攝像頭,支持夜視和溫度檢測,用于不同光照條件下的目標識別。使用Sharp GP2Y0A02YK0F,用于近距離障礙物檢測。為了保證機器人長時間工作,采用Panasonic NCR18650B作為主要電池,其高容量和高放電率能夠支持機器人不間斷工作。準備太陽能充電板,在適當的環境下提供額外的能源補充[6]。
1.2 控制系統
平臺采用NVIDIA Jetson AGX Xavier高性能嵌入式處理器,具備強大的計算能力和先進的深度學習加速能力,能夠處理復雜的圖像和傳感器數據,同時支持ROS。使用RoboClaw 2x60A Motor Controller,支持雙馬達獨立控制,保證底盤和執行器運行平穩,控制高效。使用Wirepas Mesh進行無線通信,構建可靠的機器人網絡。同時,支持Wi-Fi和4G/5G通信,保證與中央監控系統的實時數據傳輸和遠程操控。
1.3 安全裝置
智能安防巡檢機器人監控系統采用Polycarbonate/ABS混合材料制成的外殼,強度很高,能夠有效抵御外部物體的碰撞和損害。機器人外殼采用IP67級別密封設計,保證機器人在惡劣天氣和環境中能夠穩定運行,防水深度達1 m,防塵性能良好。選擇這些硬件旨在提供一個穩健、高效和可靠的機器人平臺,以適應各種環境并滿足任務要求。在實際應用中,可能需要根據具體情況進行微調和定制。
2 軟件設計
2.1 自主建圖
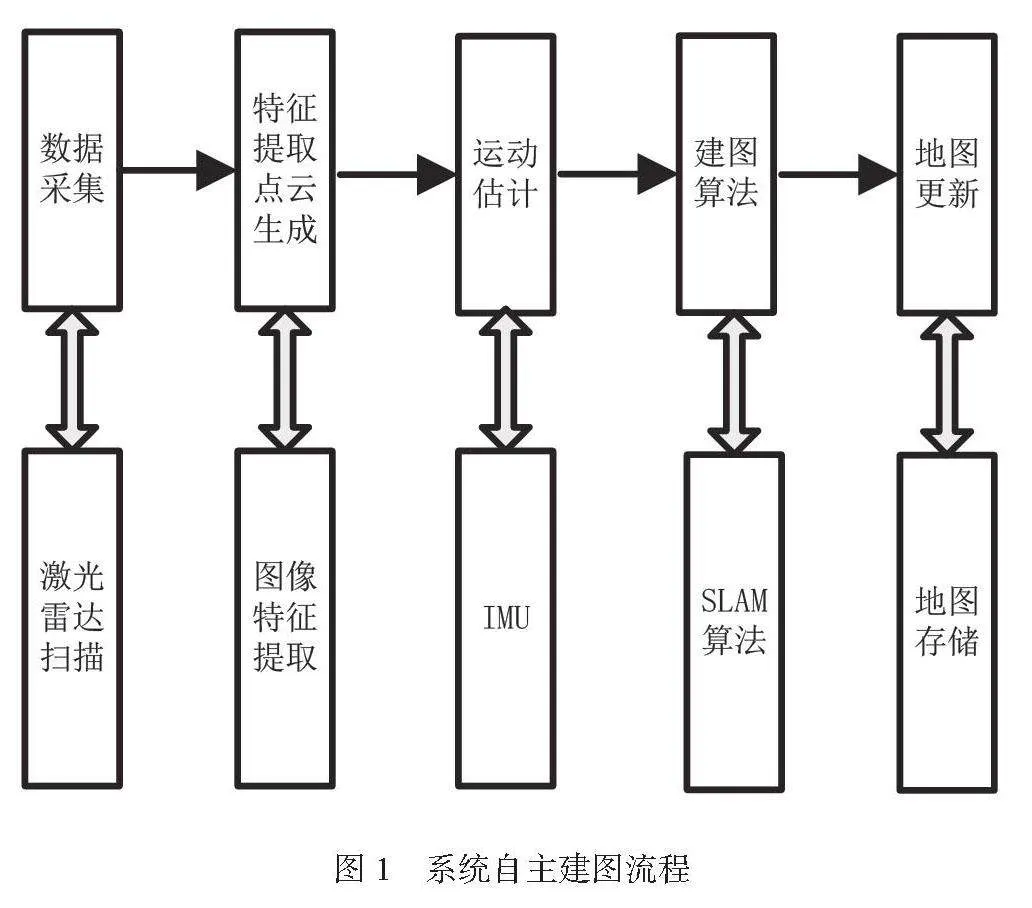
自主建圖通過激光雷達、攝像頭等傳感器獲取環境數據,實時構建機器人所在環境的地圖,使機器人能夠感知并理解其周圍的物體、結構和空間分布,有助于提高機器人對環境的認知,自主建圖流程如圖1所示。
系統集成了多種傳感器和技術,為環境感知提供全面、精確的數據。通過激光雷達360°掃描,系統能夠高效地獲取環境中各方向障礙物的距離和角度信息,全方位感知周圍環境。激光雷達的高精度測距和定位能力為系統提供了可靠的基礎數據。同時,系統還利用攝像頭拍攝實時圖像,為后續處理圖像和提取特征提供了豐富的視覺信息。圖像處理技術可以識別和分析圖像中的物體、輪廓和其他關鍵特征,為系統進一步的決策和規劃提供重要支持。結合攝像頭和激光雷達掃描數據,系統能夠在多個感知層面上獲取全面的環境信息。為了更好地整合數據,系統將激光雷達掃描數據轉換為點云數據,使用坐標轉換公式將極坐標系下的數據轉換為直角坐標系下的數據,具體計算過程如公式(1)所示。
(1)
式中:X為橫軸的坐標點位置,Y為縱軸的坐標點位置;R為距離;θ為角度。對攝像頭圖像進行計算機視覺處理,提取特征點、角點等,以輔助建圖。將激光雷達掃描數據轉換為點云數據,系統精準記錄了環境中各點的三維坐標,利用機器人底盤的里程計信息,推算機器人在運動中的位姿變化。慣性測量單元(IMU)使用機器人的陀螺儀和加速度計數據,結合卡爾曼濾波等算法,提高位姿的準確性。系統使用基于激光雷達和視覺信息的Hector SLAM算法,對機器人周圍環境進行建圖,融合激光雷達點云地圖和視覺特征地圖,得到綜合的環境地圖。持續接收傳感器數據,利用運動估計和SLAM算法實時更新機器人的位姿和環境地圖。將實時建立的地圖存儲在機器人內部,以備后續使用,可選地將地圖數據遠程同步至中央監控系統,以供全局監控和管理。
2.2 路徑規劃
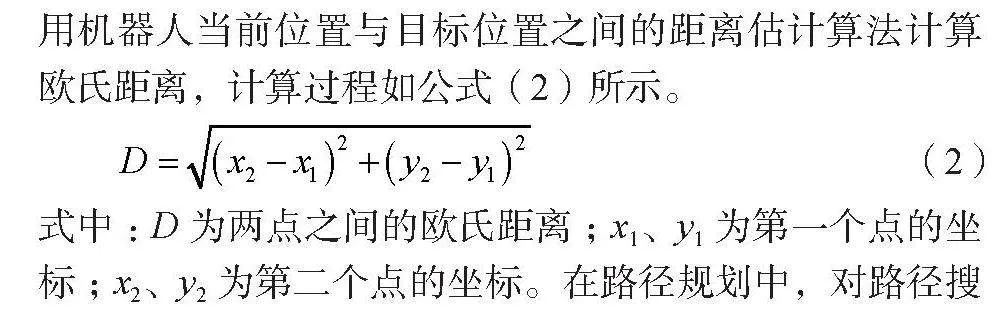
智能安防巡檢機器人監控系統的高效運行來自多個關鍵模塊的配合。中央監控系統或任務下發模塊負責向機器人傳遞具體任務,例如需要巡檢的區域或檢測的特定目標,這為機器人提供了明確的導航目標。自主建圖模塊通過實時地圖提供關鍵的環境信息,包括障礙物位置和機器人當前位置。這個模塊通過傳感器數據實時更新地圖,使系統能夠適應動態環境的變化,為路徑規劃提供準確的地理信息。在路徑規劃階段,系統根據任務性質和環境特點選擇適當的路徑規劃算法,保證當執行任務時,機器人選擇最優路徑,提高效率和準確性。為了評估路徑優劣,使用機器人當前位置與目標位置之間的距離估計算法計算歐氏距離,計算過程如公式(2)所示。
(2)
式中:D為兩點之間的歐氏距離;x1、y1為第一個點的坐標;x2、y2為第二個點的坐標。在路徑規劃中,對路徑搜索和權值計算來說,估算非常重要,估算直線距離有助于選擇更直觀和高效的路徑。路徑規劃不僅需要考慮直線距離,還需要考慮路徑中可能存在的風險和難度因素,因此,在規劃過程中,系統會為路徑中的各點分配相應權值,以便更全面地評估路徑優劣。權值分配可以反映路徑中的難度、風險或其他關鍵因素,使路徑規劃算法更智能,適應性更強。為了保證路徑規劃更高效,引入A*算法,這是一種常用于圖搜索和圖遍歷的算法。A*算法綜合考慮路徑的實際代價和估計的剩余代價,能夠在地圖中搜索一條從當前位置到目標位置的最佳路徑。A*算法的估價函數如公式(3)所示。
f(n)=g(n)+h(n) " " " " (3)
式中:f(n)為估價函數值;g(n)為起點到節點n的實際代價;h(n)為啟發函數估計的代價。該算法不僅考慮了路徑的長度,還充分考慮了路徑的權值分布,使機器人能夠智能地規劃復雜環境中的路徑。系統通過擬合光滑路徑的樣條曲線,保證路徑平滑性和可執行性。將優化后的路徑轉化為機器人底盤的控制命令,保證機器人能夠按照規劃路徑行進。機器人按照生成的控制命令執行路徑,通過里程計和傳感器反饋數據,實時更新位置。當機器人到達任務目標點時,反饋任務完成狀態至中央監控系統,以便監控和記錄。
2.3 安防巡檢
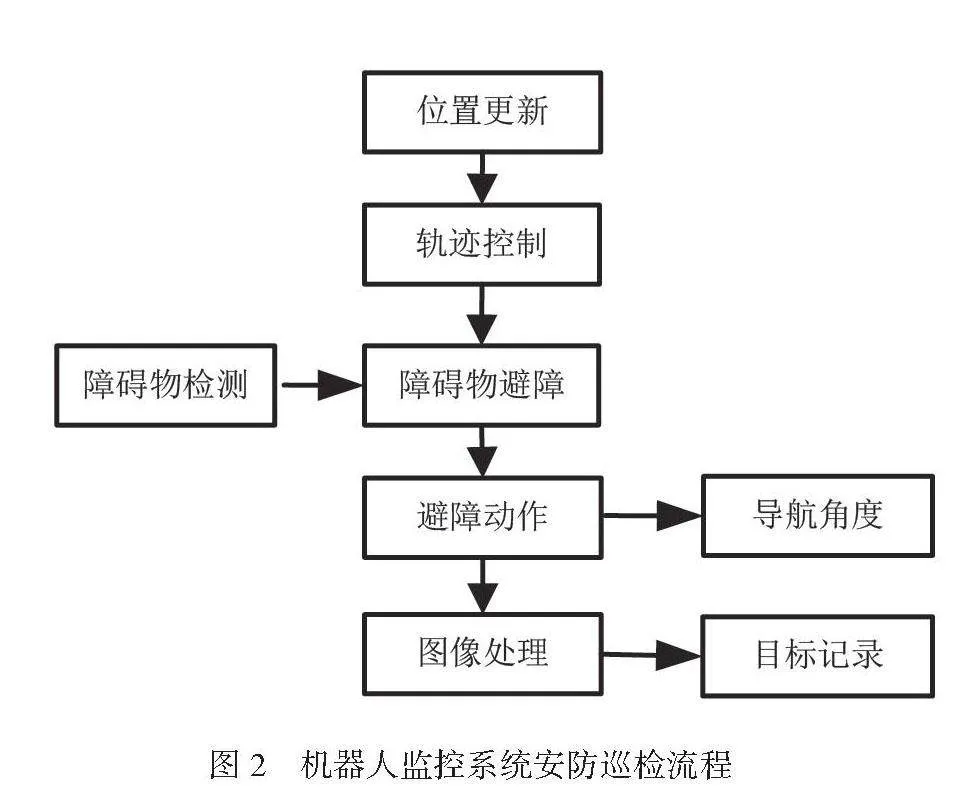
完成路徑規劃后,機器人按照規劃路徑執行導航。路徑跟蹤的目標是實時更新機器人的位置,保證其沿規劃好的路徑移動,完成安防巡檢,具體流程如圖2所示。
系統具備強大的自主導航能力,綜合利用里程計和傳感器數據,實時更新機器人的當前位置。其中,里程計提供了機器人的運動軌跡信息,激光雷達、攝像頭等傳感器負責感知周圍環境。多源數據集成為機器人提供了全面感知的基礎,使其能夠準確地沿著規劃路徑移動。在路徑跟蹤方面,系統采用PID(比例-積分-微分)控制算法,保證機器人能夠在運動過程中保持位置精確。算法不斷調整機器人的速度和方向,有效跟蹤其規劃路徑。系統通過持續監測里程計和傳感器數據,實時糾正機器人的運動狀況,保證其在巡檢過程中導航準確、穩定。
在巡檢過程中可能會遇到各種障礙物,為了應對這些情況,在系統中引入激光雷達、攝像頭等傳感器數據。這些傳感器能夠實時檢測周圍環境中的障礙物,當檢測到障礙物時就會執行相應的避障動作。執行避障動作可能涉及調整機器人的導航角度,以保證機器人能夠繞過障礙物而不發生碰撞。這個調整過程如公式(4)所示。
jx=j+jb " " " " " (4)
式中:jx為新角度;j為原角度;jb為障礙物避讓角度。在巡檢過程中,機器人需要檢測并記錄任務目標,例如異常物體或異常行為。通過攝像頭獲取圖像后,機器人檢測圖像中是否存在目標,如果存在就記錄目標的位置、類型等信息。智能導航決策使機器人能夠靈活應對復雜的環境變化,完成巡檢任務。
3 測試試驗
3.1 試驗準備
為測試智能安防巡檢機器人監控系統的穩定性,設計試驗。試驗使用TurtleBot3 Waffle型號機器人底盤,配備北陽(Hokuyo)URG-04LX-UG01激光雷達、樹莓派(Raspberry Pi)HQ Camera攝像頭等傳感器。主控制器采用Raspberry Pi 4B,運行基于ROS的ROS Noetic版本,通信模塊采用Raspberry Pi內置Wi-Fi,保證實時數據傳輸。配備大疆(DJI)RoboMaster EP Core Intelligent Battery高容量鋰電池,保證機器人能夠長時間巡檢。使用TurtleBot3 Waffle 防護外殼,其IP65級防水、防塵設計能夠適應各種環境。利用Raspberry Pi自帶的SysBench工具測試Raspberry Pi 4B的性能。使用ROS提供的rosbag錄制和回放工具,測試Wi-Fi傳輸ROS消息的穩定性和實時性。利用機器人系統實驗室(Robotics Systems Lab,RSL)的ROS 導航棧(Navigation Stack)套件,測試機器人底盤的運動精度和速度。
3.2 試驗結果
為測試智能安防巡檢機器人監控系統的各項性能,試驗選擇時間節點T1~T5,并記錄在系統運行過程中機器人接收任務指令后的響應時間、機器人每小時能夠完成的巡檢任務數量、傳感器獲取的數據準確性、機器人與中央監控系統之間的通信穩定性、機器人在巡檢過程中的導航精度以及機器人在遇到障礙物時的避障效果,試驗結果見表1。
從表1可以看出,在接收任務指令后,機器人平均響應速度為12 ms~16 ms,任務響應能力強,能夠迅速處理實時任務。機器人每小時能夠完成100~115個巡檢任務,說明其處理能力強,能夠滿足大面積區域的安防巡檢需求。傳感器數據準確性保持在97.5%~98.8%,說明傳感器數據獲取穩定可靠,有助于機器人準確感知環境。通信穩定性保持在97.9%~98.2%,說明機器人與中央監控系統之間通信穩定,有助于系統進行遠程控制和監控。機器人導航精度為0.11 m~0.15 m,說明機器人能夠精確遵循規劃路徑,高效完成任務。當遇到障礙物時機器人的避障效果良好,說明其對環境變化具有敏感度,適應能力強,安全程度高。
綜上所述,智能安防巡檢機器人監控系統是一套性能卓越的智能安防系統,在響應速度、處理能力、傳感器數據準確性、通信穩定性、導航精度和避障效果等方面都表現出色。該系統廣泛應用于現代安防領域,能夠提高安全巡檢的效率和可靠性。
4 結論
本文深入研究智能安防巡檢機器人監控系統,通過試驗數據驗證系統在多個關鍵性能指標上的表現。試驗結果表明,該系統在響應速度、處理能力、傳感器數據準確性、通信穩定性、導航精度和避障效果等方面均表現出色。這個結論不僅對學術界在機器人技術和安防領域的研究具有一定的參考價值,還為工程實踐提供了指導。未來,科研人員將繼續提升系統性能,拓展適用場景,不斷推動智能安防巡檢機器人技術的發展,為構建更安全、智能的社會做出貢獻。
參考文獻
[1]陳衛麗,黃佳浩,陳俊鋒,等.基于ROS的安防巡檢機器人設計與開發[J].工業控制計算機,2023,36(9):28-29,32.
[2]黃孟芝.基于智能安防打造智慧機場安全建設核心[J].智慧中國,2023(6):50-51.
[3]王繼能,孫敏.5G+智能安防的應用[J].信息與電腦(理論版),2023,35(5):235-237.
[4]毋毅.面向智慧樓宇的安防可視化管理系統的研究與設計[J].信息與電腦(理論版),2023,35(2):166-169.
[5]黃松濤. 基于機器視覺的電力巡檢機器人自動化系統設計 [J]. 自動化技術與應用, 2024 (1): 35-38,43.
[6]鄧志吉,林峰,孔維生.基于5G的智能安防標準化建設探究[J].標準科學,2021(增刊1):123-133.
通信作者:常浩(1988-),男,漢族,湖南長沙人,碩士研究生,講師,研究方向為機電一體化運用。
電子郵箱:657578985@qq.com。
基金項目:2023年湖南省教育廳科學研究項目(優秀青年項目)“智能安防巡檢機器人監控系統關鍵技術研究”(項目編號:23B0939);湖南省教育科學“十四五”規劃2023 年度課題“科教融匯視域下高職教師教學創新團隊建設路徑研究”(項目編號:ND233677);2021年度湖南安全技術職業學院應用技術專項課題“基于工業物聯網的安全生產裝備狀態監測系統研究”(項目編號:AY21E001)。