注意力機制YOLOv8在無人機鐵路異物入侵檢測中的應用
2024-12-06 00:00:00江躍龍鐘少波梁陽秀呂超鑫翁錦洲
交通科技與管理 2024年21期
摘要 鑒于無人機在軌交監測中的廣泛應用及其靈活性優勢,該研究針對無人機視角下小目標檢測的挑戰,包括檢測難度、異物遮擋、相似性干擾和相機抖動等問題,提出了改進方案。通過將SEAttention技術集成到YOLOv8檢測模型的骨干網絡中,增強了模型對小目標的識別能力。改進后的YOLOv8-fly模型經過大量數據集訓練,顯著提升了無人機在鐵路異物入侵檢測中的準確性和效率。試驗結果證明:該模型在小目標異物檢測任務中具有明顯優勢,為提升智慧軌交系統的安全性和效率提供了新的技術支撐。
關鍵詞 無人機鐵路異物入侵檢測;SEAttention;YOLOv8-fly;智慧軌交;深度學習;遷移學習
中圖分類號 TP39 文獻標識碼 A 文章編號 2096-8949(2024)21-0005-04
0 引言
隨著現代化科學技術的快速發展,智慧軌交系統的構建和升級已成為當今交通發展的重要趨勢。然而,在智慧軌交系統中,鐵路異物入侵問題日益凸顯,對列車運行安全構成了嚴重威脅。傳統的接觸式檢測方法存在精度低,無法準確定位異物位置、大小、形狀等問題,而人工巡檢則存在巡檢人員疏忽、工器具遺落、漏檢等風險。因此,開發一種高效、準確的鐵路異物入侵檢測系統具有重要的現實意義和應用價值[1]。目前,針對鐵路異物入侵問題,已有研究將人工智能技術與圖像視頻分析結合,通過對軌道異物進行目標檢測來實現入侵檢測和報警。這種方法可以有效地提高檢測精度和效率,降低人力巡檢的成本。然而,現有的目標檢測技術仍存在一些挑戰,如檢測精度、檢測速度、模型大小等問題,導致其在軌道異物檢測中不能發揮出最大價值。該研究旨在解決目前鐵路異物入侵檢測中存在的問題,通過利用無人機代替人工進行巡檢,結合圖像視頻分析技術,實現對軌道異物的精準、快速檢測。無人機巡檢不僅可以擺脫生產工作對人力的依賴,減少用工支出和成本,還能提升巡檢工作的準確性和效率,保障作業的安全。該研究以無人機為核心載體,通過收集靜(動)態圖像信息,對采集的數據進行視覺矯正。基于YOLOv8-fly模型與SEAttention技術融合的圖像特征提取方法,結合視覺顯著性的異物提取和特征學習的異物識別技術,對出現的物體進行識別并判斷其是否干擾列車正常運行。一旦識別為異物,系統將計算異物的地平面定位,并確認其在對應坐標系中的坐標。通過云平臺的方式,基于視頻內容的異物跟蹤及入侵行為預警技術,系統將自動反饋給后臺工作人員發出警報信息,并及時對列車進行限速控制[2]。此外,該研究還將探索如何最大限度降低由于事故所帶來的直接和間接影響,并指派人員到達現場進行異物處理。
1 YOLOv8目標檢測模型
YOLOv8模型,作為一種基于深度學習的目標檢測模型,相較于其他目標檢測算法,其展現出了顯著的性能優勢和廣泛的應用潛力。此外,YOLOv8在先前YOLO(You Only Look Once)版本的基礎上進行了關鍵的改進和創新[2],YOLOv8集成了多個YOLO系列模型的優勢,對模型結構進行了全面優化,不僅繼承了前代模型的優點,而且在多個關鍵領域實現了顯著的突破。得益于上述新技術的采用和結構優化,YOLOv8能在CPU至GPU的多種硬件平臺上高效運行,展現出卓越的實時性和準確性。YOLOv8支持廣泛的視覺AI任務,涵蓋檢測、分割、姿態估計、跟蹤和分類等多個方面[3]。通過采用先進的目標檢測算法和技術,YOLOv8模型能在不同場景下實現高精度的目標檢測。
2 注意力機制在YOLOv8模型的構建
構建帶有注意力機制的YOLOv8模型以優化無人機鐵路異物入侵檢測任務,是一項結合了深度學習和計算機視覺技術的復雜任務。YOLOv8是一個先進的目標檢測模型,它利用深度學習技術,特別是卷積神經網絡(CNN),實現了對圖像中目標的快速、準確的識別和定位。其基礎結構包括卷積層、池化層、全連接層等,其核心是Darknet-53網絡[4],用于高效地提取圖像特征。這一結構為無人機鐵路異物入侵檢測任務提供了堅實的基礎。為了進一步提升模型的性能,該研究引入了注意力機制[5]。在無人機鐵路異物入侵檢測中,注意力機制能夠協助模型更加聚焦于關鍵特征,如異物的形狀、大小、顏色等,從而有效提高檢測的準確性和效率。根據任務需求,我們可以選擇通道注意力、空間注意力或兩者的結合來優化模型。在YOLOv8中集成注意力模塊需要謹慎選擇其位置。通常,注意力模塊可以放置在特征提取之后或特征融合之前。根據所選的注意力機制,需要修改YOLOv8的網絡結構,添加相應的層或模塊來實現注意力機制。為了訓練帶有注意力機制的YOLOv8模型,需要準備標注的無人機鐵路異物入侵數據集。設置合適的訓練參數,如學習率、批處理大小、迭代次數等,對于模型的訓練至關重要。利用深度學習框架(如PyTorch或TensorFlow),可以高效地訓練模型,直至其性能達到預期要求。通過驗證集或測試集,可以評估模型的性能,如準確率、召回率、mAP等指標。根據評估結果,可以對模型進行調優,如調整網絡結構、優化訓練參數等。重復訓練和評估過程,直至模型性能達到最佳狀態。最后,將訓練好的帶有注意力機制的YOLOv8模型部署到無人機鐵路異物入侵檢測系統中。通過實時采集無人機拍攝的視頻或圖像數據,利用該模型進行異物的識別和定位,從而實現高效的鐵路安全監測。
3 基于注意力機制的YOLOv8-fly模型
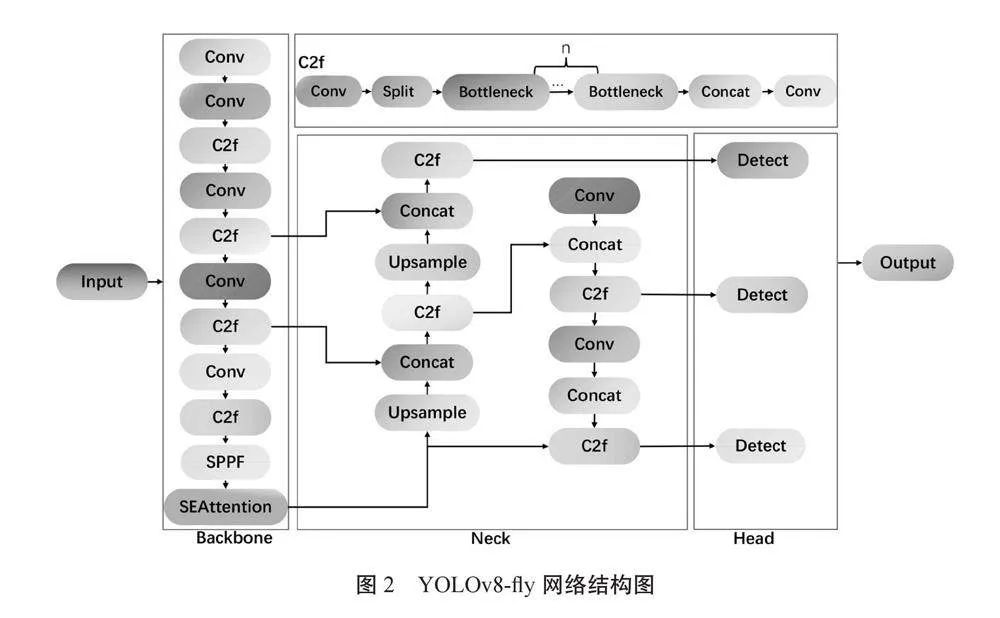
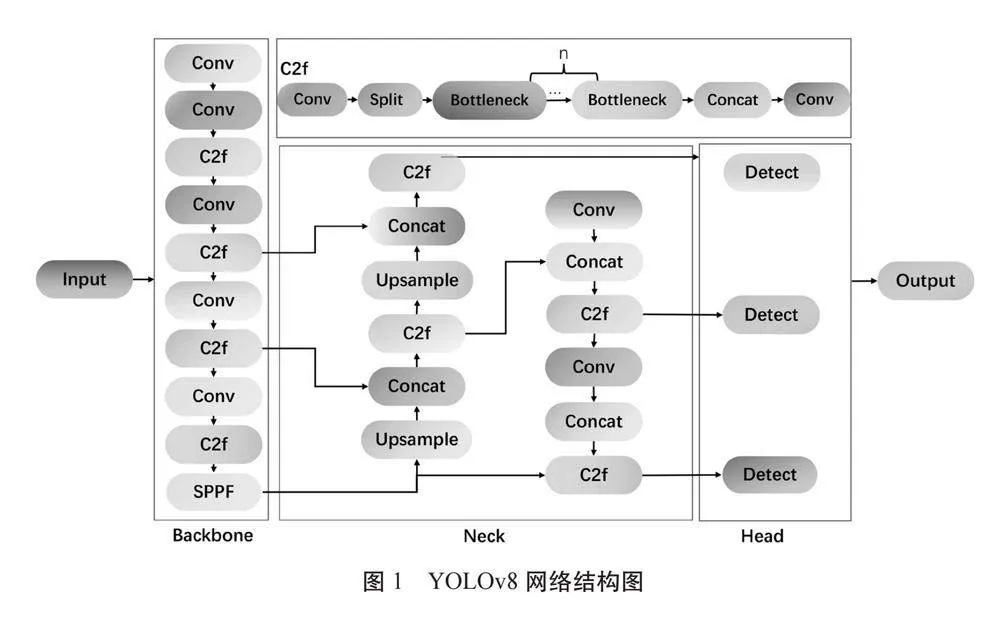
在鐵路異物入侵檢測領域,為提升檢測效率和精確性,該文選取了單階段檢測算法YOLOv8作為基礎框架。該算法具備在多尺度特征上直接預測目標類別和位置的能力,不僅提高了檢測效率,還簡化了操作流程,進而優化了不同大小目標的預測效果。YOLOv8算法框架(如圖1所示)由四大核心組件構成[6]:輸入(Input)、骨干(Backbone)、頸部(Neck)和頭部(Head)[5],每一部分均發揮著至關重要的作用,共同構成了這一高效的目標檢測算法。在眾多YOLO系列算法中,YOLOv8憑借其卓越性能,成為當前最為先進的一階段目標檢測算法之一。然而,YOLOv8在計算量、模型復雜度及識別類別上仍存在一定局限。為克服這些挑戰,該文創新性地提出了針對鐵路異物入侵檢測的改進模型YOLOv8-fly(如圖2所示)。該模型在骨干特征提取網絡中巧妙地引入了SEAttention注意力機制,革新了傳統的圖像處理任務方法,并在目標分類、檢測、分割和跟蹤等領域均取得了顯著成效,從而大幅提升了異物入侵檢測的能力。在實際應用中,通過大量數據集,結合標注圖片和遷移學習技術,對YOLOv8-fly模型進行了深入的訓練和學習。這使得模型能夠自動學習和識別多種類型的鐵路入侵異物特征,在實際檢測中展現出更高的準確性和效率。
圖1 YOLOv8網絡結構圖
圖2 YOLOv8-fly網絡結構圖
4 YOLOv8模型與無人機的深度融合
該文以無人機攝像圖傳為研究對象,通過引入先檢測后跟蹤(Tracking By Detection,TBD)模式,實現了無人機視角下的鐵路異物入侵檢測任務。在此過程中,首先運用目標檢測算法精確提取異物目標的檢測框信息,這些信息涵蓋了目標位置、類別以及置信度得分等關鍵數據。隨后,基于這些詳盡的信息,采用先進的YOLOv8-fly模型進行預測和數據關聯,確保了對目標的準確跟蹤。目標檢測算法的性能對目標跟蹤的精度具有決定性作用。然而,在無人機高空飛行場景中,由于異物目標像素點相對較少,傳統的小目標檢測方法往往效果欠佳,從而影響了整體的跟蹤性能。為應對這一挑戰,該研究創新性地將YOLOv8-fly模型與無人機技術進行了深度融合。這一技術融合不僅充分結合了目標檢測算法與無人機技術的各自優勢,更為鐵路異物入侵檢測等任務提供了高效、準確的解決方案。YOLOv8-fly模型作為當前先進的目標檢測算法,以其卓越的實時性和準確性在業界備受贊譽。它采用基于Anchor-Free的檢測策略,直接預測目標的中心點和寬高比例,從而顯著提升了檢測精度和速度。這一特性使得YOLOv8-fly模型特別適用于處理無人機捕獲的高清圖像或視頻數據,能夠迅速而準確地識別和定位軌道上的異物。與此同時,無人機作為一種高度靈活的空中平臺,具備廣泛覆蓋區域并實時捕獲鐵路沿線圖像信息的能力。其高度機動性和視角優勢使得無人機能夠在復雜環境中高效巡檢,尤其是在人力難以到達或覆蓋的區域。無人機搭載的高清攝像頭和傳感器能夠捕獲清晰的圖像數據[7],為YOLOv8-fly模型提供了豐富的輸入信息。通過將YOLOv8-fly模型與無人機進行深度融合,實現了以下顯著優勢:無人機實時采集的圖像數據能夠迅速通過高速傳輸鏈路傳輸至處理中心,并由YOLOv8-fly模型進行實時目標檢測。這一特點有助于及時發現并處理軌道上的異物,從而降低了潛在的安全風險。結合無人機的高清圖像數據和YOLOv8-fly模型的精確檢測能力,能夠對異物進行準確識別和定位。這不僅有助于避免誤報和漏報,還提高了鐵路異物入侵檢測的準確性。無人機的自主飛行和YOLOv8-fly模型的自動化處理大幅減少了人工巡檢的工作量和時間成本。同時,通過優化算法和模型結構,進一步提高了檢測速度,實現了對大量圖像數據的快速處理。
強大的擴展性:YOLOv8-fly模型與無人機的深度融合不僅適用于鐵路異物入侵檢測,還可廣泛應用于環境監測、災害救援、農業巡查等多個領域。通過調整模型和參數,能夠靈活適應不同場景和需求。綜上所述,YOLOv8-fly模型與無人機的深度融合為鐵路異物入侵檢測等任務提供了高效、準確的解決方案。這一技術的實施將顯著提升鐵路運營的安全性和效率,為智能化巡檢系統的發展注入新的活力。
5 試驗結果分析
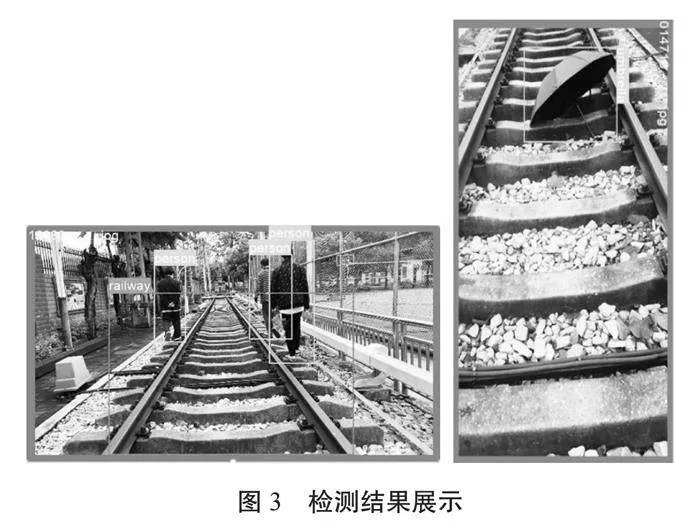
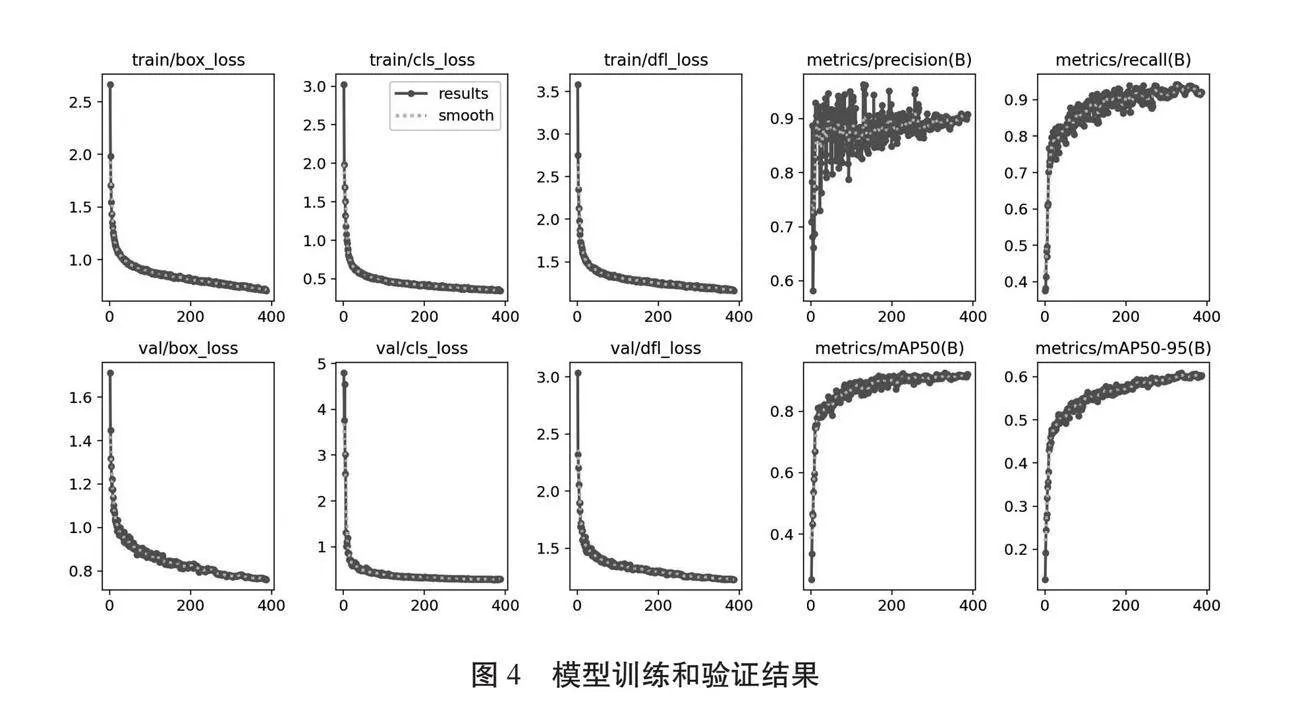
在該文深入探討了無人機視角下的鐵路異物入侵檢測任務后,通過引入先檢測后跟蹤(Tracking By Detection,TBD)模式,并結合先進的YOLOv8-fly模型,實現了對鐵路異物的高效、準確檢測(如圖3所示)。經過試驗驗證,YOLOv8-fly模型在鐵路異物入侵檢測任務中表現出了卓越的性能。通過PR曲線圖可知,YOLOv8-fly模型在精確率和召回率方面的平均精度(AP)值達到90%以上(如圖4所示)。這一結果證明了YOLOv8-fly模型在鐵路異物入侵檢測領域的優勢和潛力。通過將YOLOv8-fly模型與無人機技術進行深度融合,實現了對鐵路異物的實時、高效檢測。無人機作為一種高度靈活的空中平臺,能夠實時捕獲鐵路沿線的圖像信息,為YOLOv8-fly模型提供豐富的輸入數據。同時,YOLOv8-fly模型的快速檢測能力能夠及時發現并處理軌道上的異物,從而降低了潛在的安全風險。此外,YOLOv8-fly模型不僅適用于鐵路異物入侵檢測任務,還具備廣泛的應用前景。該模型可以通過調整參數和模型結構來適應不同的場景和需求,為環境監測、災害救援、農業巡查等領域提供有效的解決方案。未來的工作將聚焦于算法的精細調整、網絡結構的優化改進以及數據增強技術的深入應用等方面。通過進一步研究,能夠有效提高YOLOv8-fly模型的檢測精度和實時性,為鐵路運營的安全性和效率做出更大的貢獻。該研究通過引入YOLOv8-fly模型與無人機技術的深度融合,實現了對鐵路異物的高效、準確檢測。這一技術的成功應用不僅為鐵路運營的安全性和效率提供了有力保障,也為智能化巡檢系統的發展注入了新的活力。
6 結論
該文研究了一種創新的基于YOLOv8模型的鐵路異物入侵檢測系統,該系統結合了YOLOv8和無人機技術,顯著提升了異物入侵預測和監測的準確性和實時性,從而提高了檢測系統整體的工作效率和安全性。通過引入了優化后的YOLOv8-fly模型,并集成SEAttention注意力機制,進一步增強了模型的檢測性能。試驗結果顯示,基于YOLOv8-fly模型的鐵路異物入侵檢測方法在精確率和實時性方面均表現出色,能夠實現對鐵路異物入侵的精準監測,為智慧軌交異物檢測提供了強有力的技術支撐。未來將繼續探索更為復雜的模型結構,并考慮結合多模態數據和遷移學習等先進技術,以進一步提高異物檢測的準確性和模型的泛化能力。該研究的方法不僅適用于鐵路異物入侵檢測,還具有廣泛的推廣潛力,可應用于其他類型的軌道交通行駛途中的異物入侵檢測,推動智慧軌交的全面發展和軌道交通業的智能化升級。
參考文獻
[1]張楠.基于視頻的鐵路異物入侵檢測技術研究[D].杭州:浙江大學,2022.
[2]李丹丹.鐵路軌道異物入侵的智能識別研究[D].蘭州:蘭州交通大學,2016.
[3]張碧川,劉衛東,米浩,等.基于輕量化YOLOv8的安全帽檢測[J].電腦與電信,2024,(Z1):35-39.
[4]謝有浩,魏保良,姜闊勝,等.嵌入自適應注意力機制YOLOv3的類圓桿物計數方法研究[J].邵陽學院學報(自然科學版),2023(1):24-31.
[5]左歡.基于深度學習的鋼材表面缺陷檢測[D].西安.西安工業大學,2024.
[6]李金靈,李維剛,陳燕才,等.基于改進YOLOv5算法的帶鋼表面缺陷檢測[J].鋼鐵研究學報,2023(6):767-777.
[7]李海濤.淺談配電網無人機自主巡檢注意事項[J].農村電工,2024(5):38-39.
收稿日期:2024-06-03
作者簡介:江躍龍(1984—),男,碩士研究生,研究方向:人工智能技術。
基金項目:2023年廣東省科技創新戰略專項資金“基于無人機智能感知的軌道異物入侵巡檢系統”(pdjh2023b0950);廣東省普通高校創新團隊項目(自然科學)“面向軌道交通的智能巡檢算法研究及應用創新團隊”(2021KCXTD068);2022年州市高等教育教學質量與教學改革工程“計算機應術專業群“雙師型”教師培養培訓基地”(2022SSPRJD004);2024年廣東省科技創新戰略專項資金“基于注意力機制的深度學習列車司機 BCG 信號心率健康檢測研究”(pdjh2024b629)。