天基分布式無源探測的空間多目標跟蹤方法
2024-11-26 00:00:00江林海龔柏春劉傳凱YANGYang張仁勇
系統(tǒng)工程與電子技術(shù) 2024年8期











摘 要: 針對巨型星座群等空間非合作目標實時跟蹤難題,提出一種天基分布式協(xié)同無源探測的多目標跟蹤方法。首先,建立了地球非球形J2項攝動和大氣阻力攝動條件下的軌道動力學(xué)模型,并建立了星載的單位視線矢量測量模型。然后,建立了基于勢均衡概率假設(shè)密度濾波的多目標跟蹤算法,并采用高斯混合方法求得多維積分的近似封閉解,降低算法的計算復(fù)雜度,以解決星載實現(xiàn)問題。接著,設(shè)計了多平臺多目標跟蹤交互的一致性信息融合方案,引入標簽進行目標區(qū)分,減少不同平臺之間信息傳遞與融合帶來的計算匹配問題,并使用一致性信息濾波進行信息融合。最后,以某星座局部區(qū)域的15顆軌道相近的星座衛(wèi)星作為跟蹤目標,對所提方法進行仿真實驗驗證。仿真結(jié)果表明所提方法有效,跟蹤性能比傳統(tǒng)方法提升了約60%,在協(xié)同構(gòu)型不奇異情況下跟蹤的位置誤差在5 km以內(nèi)。
關(guān)鍵詞: 無源探測; 多目標跟蹤; 一致性信息濾波; 分布式協(xié)同觀測
中圖分類號: V 488.2
文獻標志碼: A
DOI:10.12305/j.issn.1001-506X.2024.08.26
Space multi-target tracking method for space-based distributed
passive detection
JIANG Linhai1, GONG Baichun1,*, LIU Chuankai2,3, YANG Yang4, ZHANG Renyong5
(1. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China;2. Beijing Aerospace Control Center, Beijing 100190, China;3. Key Laboratory of Science and Technology on Space Flight Dynamics, Beijing 100190, China;4. School of Mechanical and Manufacturing Engineering, University of New South Wales, Sydney 2052, Australia;5. Technology and Engineering Center for Space Utilization, Chinese Academy of Science, Beijing 100094, China)
Abstract: In view of the real-time tracking problem of space non-cooperative spatial targets such as constellation groups of giant stars, a space-based distributed cooperative passive detection method for multi-target tracking is proposed. Firstly, a dynamic model of satellite orbit under the conditions of Earth’s non-spherical J2 perturbation and atmospheric drag perturbation is established, along with a unit line-of-sight vector measurement model onboard. Then, a multi-target tracking algorithm based on cardinalized probability hypothesis density filtering is developed, and an approximate closed-form solution to multidimensional integrals is obtained using the Gaussian mixture method to reduce computational complexity and address onboard implementation issues. Furthermore, a consistency information fusion scheme for multi-platform multi-target tracking interaction is designed, incorporating labels for target discrimination to mitigate computational matching issues arising from information exchange and fusion between different platforms, and employing consistency information filtering scheme for information fusion. Finally, the proposed method is validated through simulation experiments using 15 orbitally proximate constellation satellites in a local region of a constellation as tracking targets. Simulation results demonstrate the effectiveness of the proposed method, with a tracking performance improvement of approximately 60% compared to traditional methods, and position tracking errors within 5 km under non-singular cooperative configurations.
Keywords: passive detection; multi-target tracking; consensus-based information filtering; distributed collaborative observation
0 引 言
當(dāng)前,隨著巨型星座的開發(fā)和部署,近地軌道空間日益擁擠,軌道安全問題也越來越突出。例如,2021年7月和10月,SpaceX的兩顆衛(wèi)星通過一系列軌道機動靠近—國空間站,最近距離為1 km,為了規(guī)避碰撞風(fēng)險空間站不得不緊急調(diào)整軌道。因此,對巨型星座等非合作目標進行跟蹤是應(yīng)對潛在威脅的必然要求[1]。
若受地緣政治影響只在有限區(qū)域部署了測控站或測量船,跟蹤與探測覆蓋能力不足的問題更加凸顯。此外,地面測控站受天氣、地球自轉(zhuǎn)等因素限制和影響較多,發(fā)展天基探測跟蹤系統(tǒng)作為補充是大勢所趨[2]。而在眾多天基觀測手段當(dāng)中,無源光學(xué)相機由于質(zhì)量輕、能耗低、無源性等優(yōu)勢而成為了最為重要的手段之一[3-4]。因此,依賴天基無源光學(xué)平臺實現(xiàn)大量空間目標的探測跟蹤是現(xiàn)實需求,更是必然趨勢。國內(nèi)外眾多學(xué)者對多目標跟蹤進行了研究。
具有代表意義的數(shù)據(jù)關(guān)聯(lián)類跟蹤算法有聯(lián)合概率數(shù)據(jù)關(guān)聯(lián)算法[5]、多假設(shè)跟蹤算法[6]等。這些算法在面對多目標跟蹤任務(wù)時,通過數(shù)據(jù)關(guān)聯(lián),將多目標跟蹤問題轉(zhuǎn)化為單目標跟蹤問題進行解決。但是,數(shù)據(jù)關(guān)聯(lián)過程復(fù)雜、計算量大,在工程實踐上存在一定困難。隨著隨機有限集理論在多目標跟蹤領(lǐng)域的發(fā)展,新的多目標跟蹤方法被實現(xiàn)。該理論將目標狀態(tài)和該時刻的量測分別建模為隨機有限集,避免了數(shù)據(jù)關(guān)聯(lián)。基于隨機有限集發(fā)展出一系列新方法,主要有概率假設(shè)密度(probability hypothesis density, PHD)濾波器[7-9]、泊松多伯努利混合濾波器[10-12]。由于PHD濾波器只傳遞一階矩,不能對多目標的數(shù)目進行有效估計,又出現(xiàn)了勢均衡PHD(cardinalized PHD, CPHD)濾波器,該濾波器不僅傳遞后驗概率密度的一階矩,同時還傳遞勢分布[13-14]。上述濾波器存在多維積分的復(fù)雜運算且不具有解析解,于是分別采用了高斯混合實現(xiàn)[13]和序貫蒙特卡羅方法[14]進行實現(xiàn)。目前,基于隨機有限集理論的多目標跟蹤已經(jīng)在多個領(lǐng)域獲得應(yīng)用[15-19]。
當(dāng)采用無源光學(xué)相機進行探測時,只能獲得目標的視線角信息,缺少距離信息。這種欠測量的模式不僅會對多目標跟蹤的狀態(tài)估計精度、數(shù)目精度帶來較大影響,甚至在某些情況下出現(xiàn)不滿足可觀測條件的問題[20],為此有學(xué)者提出了多觀測平臺協(xié)同觀測,來彌補觀測信息缺失帶來的問題。何友等[21]詳細地闡述了多星協(xié)同信息融合的發(fā)展現(xiàn)狀與難點;Li等[22]研究了PHD濾波器在分布式多傳感器多目標跟蹤中的應(yīng)用,并且提出一種基于廣義協(xié)方差交叉融合規(guī)則的分布式融合跟蹤算法。此外,目前分布式協(xié)同跟蹤算法主要有一致性濾波算法,丁自然等[23]研究了一種基于節(jié)點通信度的信息加權(quán)一致性濾波算法,并將其應(yīng)用在無人機集群的傳感器網(wǎng)絡(luò)中;Millan等[24]考慮了數(shù)據(jù)丟包情況下的分布式卡爾曼濾波;Li等[25]分別針對空間機動目標與雷達有色噪聲場景,提出兩種自適應(yīng)無跡信息濾波;Liu等[26]利用五階球面單-徑向求積規(guī)則來處理系統(tǒng)非線性,提出一種新的一致性的分布式混合平方根容積求積信息濾波器,但是該算法對計算能力要求較高。然而,以上多種分布式一致性濾波都沒有考慮天基無源空間多目標跟蹤任務(wù)場景下的軌道特征及約束。
因此,本文面向巨型星座目標的天基無源跟蹤難題,提出一種隨機有限集方法與多目標一致性信息濾波相結(jié)合的天基分布式多目標無源跟蹤新方法。首先建立多目標運動學(xué)模型與測量模型的隨機有限集模型,然后設(shè)計基于高斯混合形式實現(xiàn)的CPHD濾波算法,并提出帶標簽的CPHD與一致性信息濾波結(jié)合方案,最后進行數(shù)值仿真實驗和結(jié)果分析。
1 空間多目標跟蹤系統(tǒng)建模
1.1 攝動條件下的軌道動力學(xué)模型
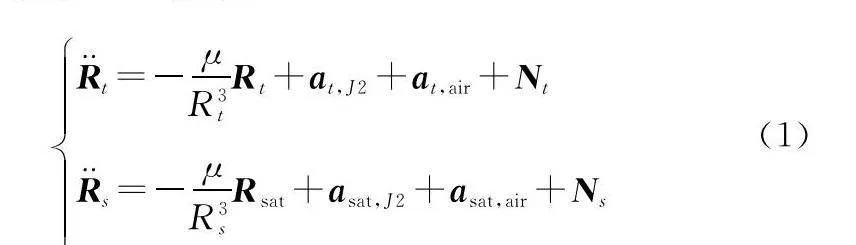
由于空間非合作目標跟蹤運動尺度較大,本文將在慣性系下建立動力學(xué)模型。這里采用經(jīng)典的J2000地心慣性坐標系,該坐標系原點位于地球質(zhì)心,X軸指向2000年1月1日12時的平均春分點,Z軸指向?qū)?yīng)時刻的平均北極,Y軸與X軸、Z軸滿足右手系規(guī)則。由于巨型星座目標主要分布在中低軌道,因此在不考慮多體引力和太陽光壓的條件下,建立地球非球形J2項引力攝動與大氣阻力攝動下的軌道動力學(xué)[27]模型:
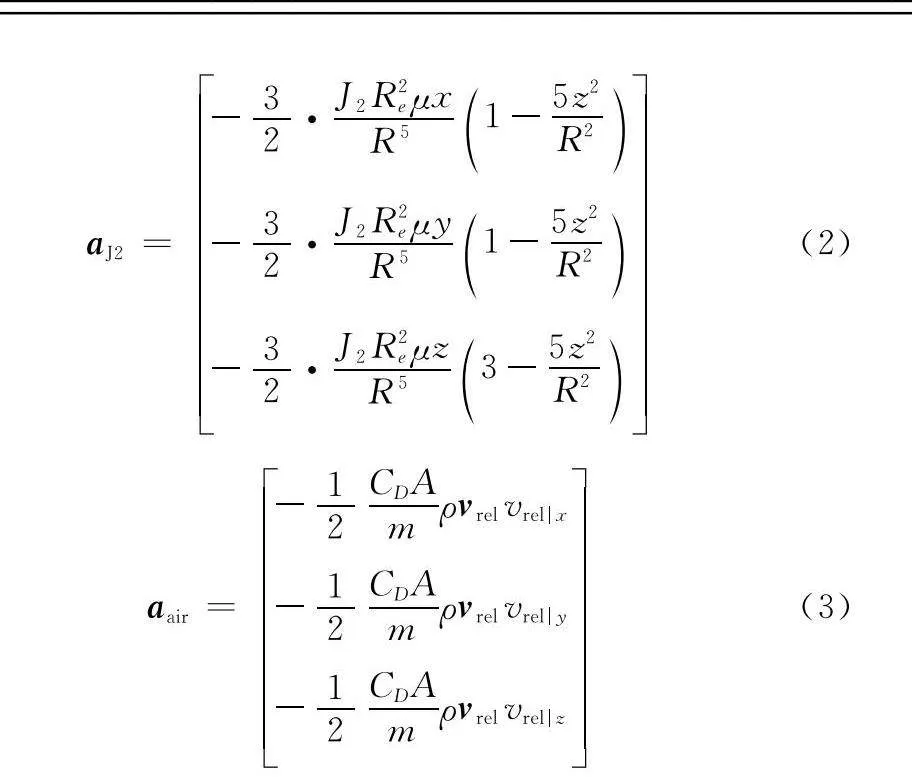
式中:R為J2000系下的軌道位置矢量;μ為標準地球萬有引力常數(shù);aJ2和aair分別表示地球非球形J2項引力攝動與大氣阻力攝動的加速度;下標t表示與空間目標相關(guān)的量;下標s表示與無源探測衛(wèi)星相關(guān)的量;N表示未建模的系統(tǒng)噪聲,假設(shè)其為零均值的高斯白噪聲。aJ2和aair分別建模如下:
式中:x,y,z為R的三軸分量;Re表示地球半徑;J2表示J2項引力攝動系數(shù);CD為大氣阻力系數(shù);A為衛(wèi)星的迎風(fēng)截面積;m為衛(wèi)星質(zhì)量;ρ為大氣密度;vrel為衛(wèi)星相對于當(dāng)?shù)卮髿獾乃俣?vrel|x,vrel|y,vrel|z分別表示vrel在J2000系下的三軸分量。vrel的計算方法如下:
式中:we為地球自轉(zhuǎn)角速度,方向指向z軸正向,大小約為7.292 115×10-5 rad/s;大氣密度模型采用簡單的指數(shù)函數(shù)大氣密度模型[28],在此不再贅述。
1.2 光學(xué)測量模型
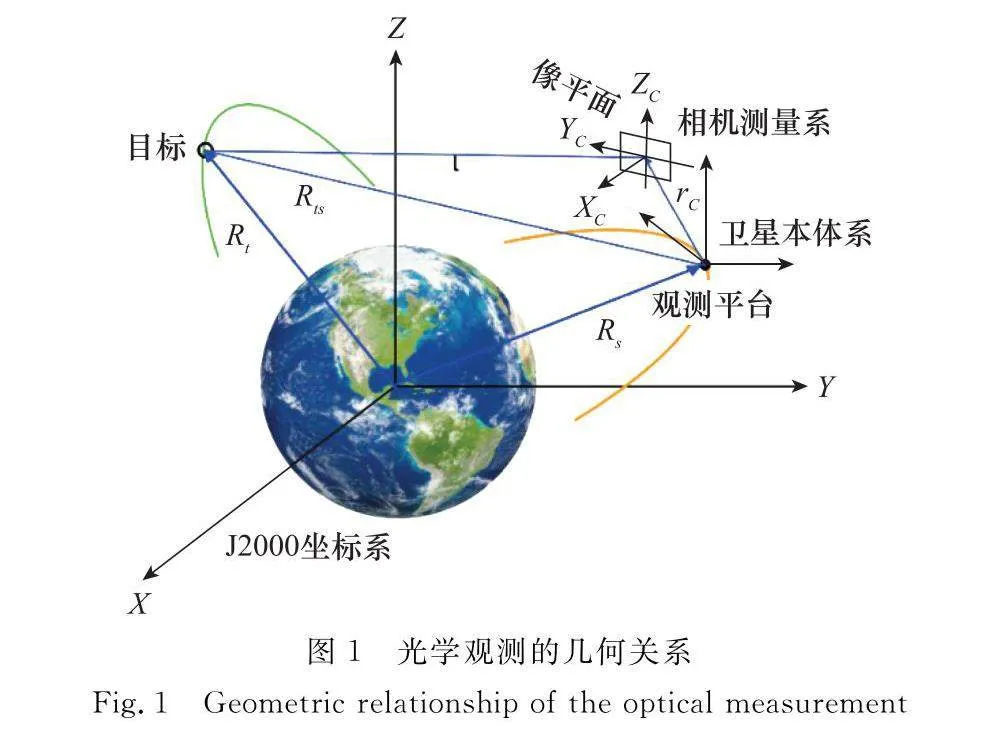
在天基觀測場景中,空間非合作目標、探測衛(wèi)星以及星載無源光學(xué)相機的相對觀測幾何關(guān)系如圖1所示。這里包含了相機測量坐標系、探測衛(wèi)星本體坐標系和J2000地心慣性坐標系,分別用m、s和i表示。其中,相機測量坐標系m的原點在光心,三軸指向由相機光軸和像平面定義并構(gòu)成右手系;衛(wèi)星本體系s的原點在衛(wèi)星質(zhì)心,三軸指向是由慣性主軸確定的右手系;J2000地心慣性坐標系已在第1.1節(jié)中定義,這里不再贅述。
為了方便論述,定義符號Cis表示從s系到i系的坐標變換矩陣,Csm 表示從m系到s系的坐標變換矩陣。其中,Cis是衛(wèi)星本體的慣性姿態(tài),通常由星載的慣性導(dǎo)航、星敏感器等設(shè)備測量解算得到;Csm代表相機在衛(wèi)星本體下的安裝方位,通過出廠前標定或星上標定得到。另外,定義符號rc表示相機在衛(wèi)星本體系下的安裝位置矢量。
根據(jù)圖1所示的測量幾何關(guān)系,可以得到慣性系下目標的相對位置矢量Rts:
Rts=Rt-Rs=CisCsmlm+Cisrc(5)
式中:lm為目標在相機測量坐標系下的位置矢量。
由式(5)可以進一步計算得到lm的表達式:
lm=CmsCsi(Rt-Rs)-Cmsrc(6)
進而,在空間非合作目標與探測衛(wèi)星距離較遠、只能點成像的條件下,可以建立如下的單位視線矢量測量模型:
式中:Nsensor為相機的測量誤差,通常建模成零均值高斯白噪聲。
2 協(xié)同多目標跟蹤濾波算法
2.1 CPHD濾波
基于隨機有限集理論的多目標貝葉斯濾波器在理論上是最優(yōu)的,但是由于該算法存在多維積分運算,實現(xiàn)難度過大。因此,PHD濾波不直接計算多目標完全后驗概率密度函數(shù),只計算多目標后驗分布的一階矩。為了保證多目標數(shù)目的估計精度,CPHD在多目標后驗分布的一階矩的基礎(chǔ)上,額外傳遞了勢的概率分布[13]。
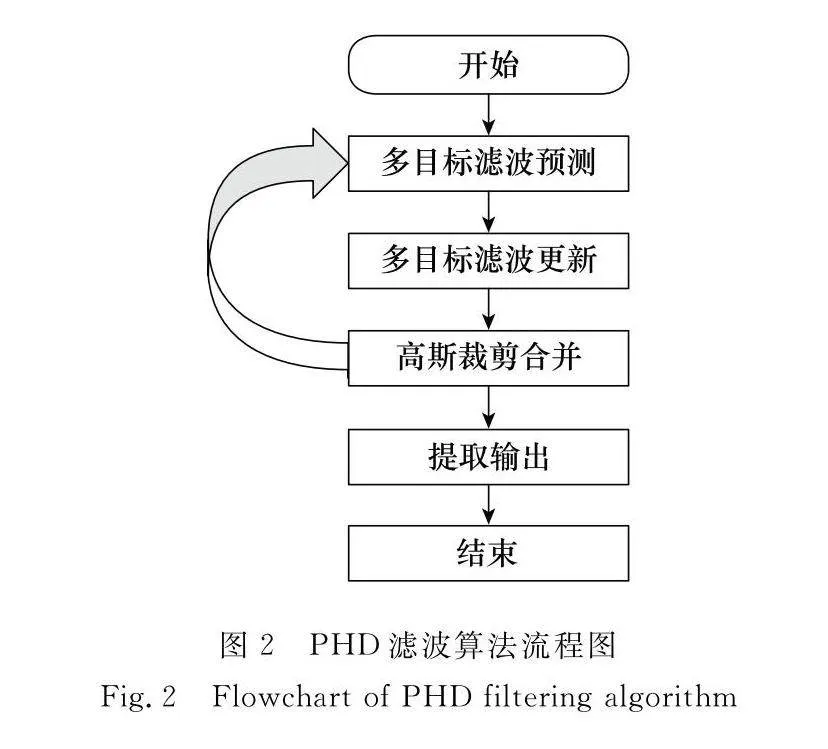
建立如圖2所示的CPHD濾波流程。通過第1.1節(jié)提出的攝動條件下軌道動力學(xué)模型建立預(yù)測狀態(tài)的隨機有限集。考慮到多目標跟蹤的運動特性,目標會存在4種運動形式,即新生(第一次出現(xiàn)在觀測平臺的編目中)、消失(從觀測的視場中消失)、衍生(在觀測視場下,單目標衍生分裂出其他目標)、運動(在平臺視場內(nèi)一直存在的空間目標)。更具體地,在本文中新生目標是指初次進入觀測衛(wèi)星平臺視場且沒有相關(guān)編目信息的空間目標;而消失目標是指離開觀測衛(wèi)星平臺視場無法被觀測的空間目標;衍生目標是指被母星在軌釋放的子目標;運動目標(也稱存活目標)是指正常在軌運動且不曾離開觀測視場的目標。
本文考慮以上特性建立多目標運動學(xué)的隨機有限集。Xk-1表示k-1時刻可能存在目標的集合,F(xiàn)k|k-1表示第1.1節(jié)中的動力學(xué)遞推模型,并將目標從k-1時刻遞推到k時刻。Bk|k-1表示k-1時刻的目標又衍生出k時刻的新目標,Γk表示k時刻的新生目標,則k時刻的多目標運動學(xué)的隨機有限集可以表示為
同時,通過第1.2節(jié)的光學(xué)觀測模型,建立了量測隨機有限集合。設(shè)定目標狀態(tài)為X={x1,x2,…,xm},第i個目標根據(jù)上述觀測場景獲得的量測為zi,其中觀測噪聲應(yīng)服從零均值、相互獨立的高斯分布。多目標跟蹤場景中傳感器得到的量測隨機有限集一般分為兩部分,一方面是來自目標狀態(tài)的量測Z={z1,z2,…,zm},另一方面是來自雜波的量測。整個測量組成的隨機有限集為meas=K∪Z。
2.2 CPHD濾波預(yù)測
CPHD的濾波預(yù)測分為高斯分量的強度預(yù)測與勢分布預(yù)測[13],分別由下式遞推得到:
式中:vk|k-1(xk)表示從k-1時刻預(yù)測k時刻PHD;ps,k|k-1(ζ)表示k-1時刻到k時刻目標存活概率;βk|k-1(xk|ζ)是衍生目標的PHD;bk(xk)表示為出生目標的PHD;pk(n′)表示k時刻的勢分布函數(shù);n′是k時刻代表目標數(shù)目的變量;Pbirth(n-i)表示k-1時刻到k時刻新生n-i個目標的概率;n是k時刻代表目標數(shù)目的變量;Cin為組合數(shù)。式(9)中的預(yù)測方程由3個部分相加得到,并與上述建立的多目標運動學(xué)隨機有限集的3個部分分別對應(yīng)。
2.3 CPHD濾波更新
CPHD的濾波更新同樣分為高斯分量的強度與勢分布更新,分別用下式更新:
式中:
式(11)中,PD表示目標能被檢測到的概率;〈·,·〉表示內(nèi)積;\z表示不包括z元素。式(13)中,λk表示k時刻平均雜波數(shù)目;gk(z|x)表示k時刻目標的狀態(tài)似然函數(shù);ck(z)為雜波的概率密度。式(14)中,pK,k表示k時刻的雜波的勢分布;M~k為k時刻量測集合的勢;ej表示j階的對稱函數(shù)。獲得勢分布函數(shù)后通過下式可以計算出期望目標數(shù)目numk:
numk=[arg max(pk(n))]int(16)
式中:[·]int表示四舍五入進行取整操作。
2.4 CPHD濾波的高斯混合實現(xiàn)
由于上述公式仍然存在多重積分、計算實現(xiàn)難度大等問題,一般采用粒子實現(xiàn)和高斯混合實現(xiàn),而本文采用高斯混合實現(xiàn)方法。高斯混合實現(xiàn)方法是將多目標先驗與后驗用高斯分量的形式進行表示,其可表示為如下遞推更新結(jié)構(gòu)。
假設(shè)k-1時刻多目標后驗分量可表示為如下所示的高斯混合形式:
式中:Jk-1|k-1表示k-1時刻的高斯分量的數(shù)目;wik-1|k-1是第i個高斯分量的權(quán)重;x^ik-1|k-1和P^ik-1|k-1分別表示第i個高斯分量的均值和協(xié)方差。通過多目標運動學(xué)模型,考慮目標新生、衍生、留存等情況,可以得到如下高斯分量與勢分布函數(shù):
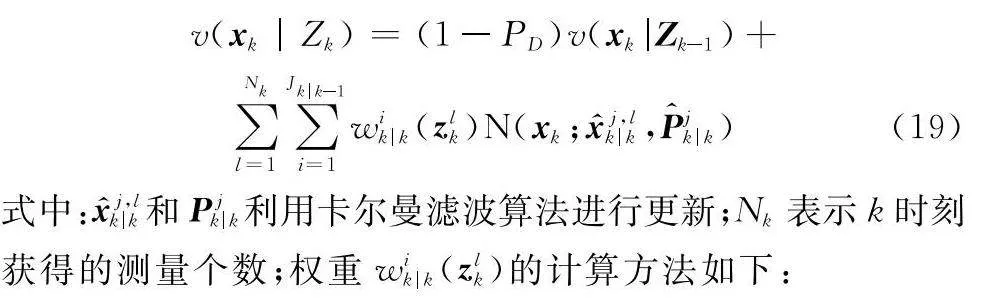
預(yù)測以上情形的高斯分量后,通過傳感器中的量測數(shù)據(jù)進行濾波更新,獲得后驗高斯分量如下:
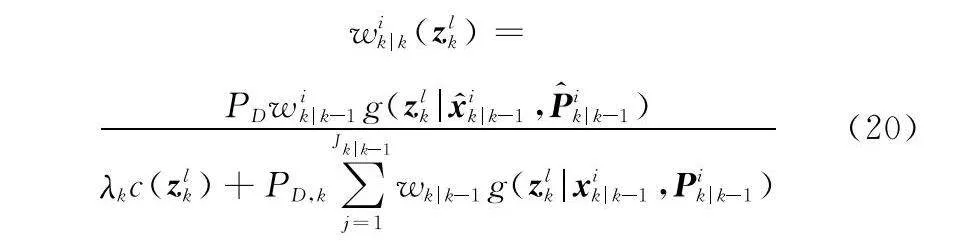
式中:x^j,lk|k和Pjk|k利用卡爾曼濾波算法進行更新;Nk表示k時刻獲得的測量個數(shù);權(quán)重wik|k(zlk)的計算方法如下:
通過式(10)、式(12)~式(16)計算出勢分布函數(shù)與在編目標的期望數(shù)目。然后,將獲取到的后驗高斯分量通過高斯裁剪和高斯并枝操作將數(shù)目維持在合理水平,以降低運算復(fù)雜程度。
2.5 分布式信息傳遞的空間多目標跟蹤濾波
考慮到觀測平臺之間的相互協(xié)同需要大量的通信資源,本節(jié)提出一種基于CPHD帶標簽的一致性信息融合方法。通過標簽將目標進行區(qū)分,使其在信息交流后進行信息融合時不進行目標關(guān)聯(lián),減少聚類算法等融合規(guī)則的使用,在有限的時間內(nèi)完成信息交流,達到一致性,從而在減少計算量的同時獲得較高的精度。
帶標簽的CPHD即為在上述的高斯分量中加入標簽量,該標簽不進行濾波更新,但是預(yù)測、測量更新、剪枝合并得到的新的高斯分量必須保持與原高斯分量的標簽一致。標簽一般為離散空間,不同目標的標簽互不相同。本文每個目標被分配的標簽為[k, l],其中k表示該目標出生時刻,l區(qū)分同一時刻的其他新生目標。因此,每個目標有固定的標簽,而從屬于同一目標的高斯分量具有相同的標簽,標簽不會隨著濾波器的預(yù)測、更新而發(fā)生改變,但是會隨著高斯分量的新生而賦予標簽。
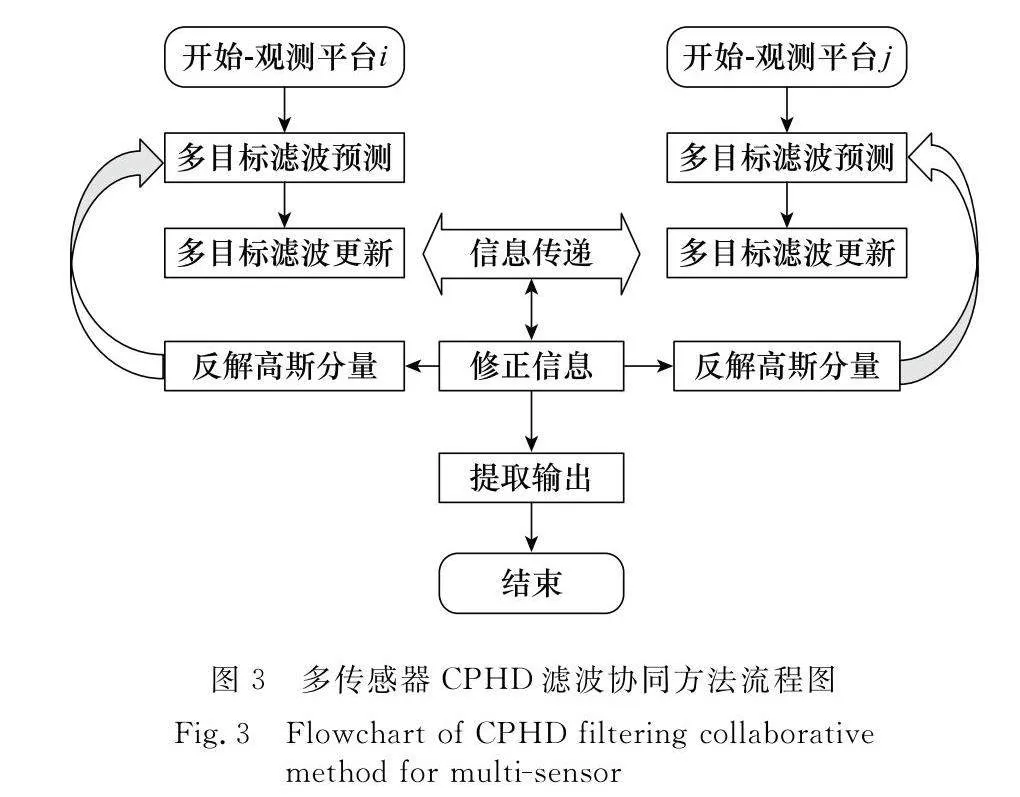
當(dāng)觀測平臺具有相同的標簽,傳遞的信息就可以通過標簽快速匹配。為了減少通信壓力,可以將高斯分量權(quán)值較大的目標進行傳遞,進行信息融合以提高精度。由于在同一標簽下利用K-means進行分類可以減少大量非同一目標的聚類計算,節(jié)省融合過程中的計算時間[29],這里引入K-means方法進行目標分類,并設(shè)計采用多次迭代信息交流實現(xiàn)一致性信息融合的方案。具體流程如圖3所示。
此外,本文不對一致性信息濾波做過多討論,直接引入常用的一致性無跡信息濾波[30]。綜合上述設(shè)計的方案和方法,最終本文所提的帶標簽的CPHD一致性信息濾波(labelled CPHD consistency information filtering, L-CPHD-CUIF)算法的具體步驟和偽代碼設(shè)計包括如下6個步驟。
步驟 1 節(jié)點i本地通過帶標簽的CPHD計算出預(yù)測高斯均值mi,lk|k-1 與協(xié)方差矩陣Pi,lk,0;
步驟 2 節(jié)點i本地獲取量測信息,并計算信息向量vi,lk,0與信息矩陣Vi,lk,0;
步驟 3 執(zhí)行信息交流
for g=1 to G
節(jié)點j向鄰居節(jié)點發(fā)送信息向量與信息矩陣
節(jié)點i接受j等鄰居節(jié)點的信息向量與信息矩陣
節(jié)點i更新一致性項
步驟 4 節(jié)點i計算最終后驗
步驟 5 獲取新的高斯權(quán)值與決定是否傳遞
步驟 6 傳遞給多目標濾波器
yi,lk|k-1,?i,lk,Yi,lk|k-1,Φi,lk 的計算方法如下:
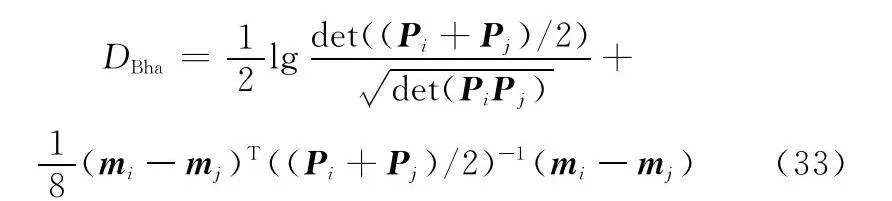
式中:mi,lk|k-1與Pi,lk|k-1表示節(jié)點i預(yù)測的l高斯分量的均值與協(xié)方差矩陣;ξ為權(quán)值系數(shù);DBha為初始交流階段高斯均值與協(xié)方差組成的兩個高斯分布距離,其計算公式為
式中:mi和Pi分別表示平臺i傳遞的高斯均值與協(xié)方差;下標j表示平臺j傳遞同類型數(shù)據(jù);θ為信息傳遞過程中的共識率,取值范圍一般為0lt;θlt;Δmax;Δmax表示圖論中的圖的最大度;N表示節(jié)點的數(shù)目;G表示公式迭代次數(shù);wmax為權(quán)重截斷參數(shù);zik|k-1,Pixz,k是傳統(tǒng)的無跡卡爾曼濾波中的變量,分別表示預(yù)測的測量值與預(yù)測狀態(tài)和測量量的協(xié)方差矩陣,具體求法不再贅述。
3 仿真校驗
3.1 仿真參數(shù)設(shè)置
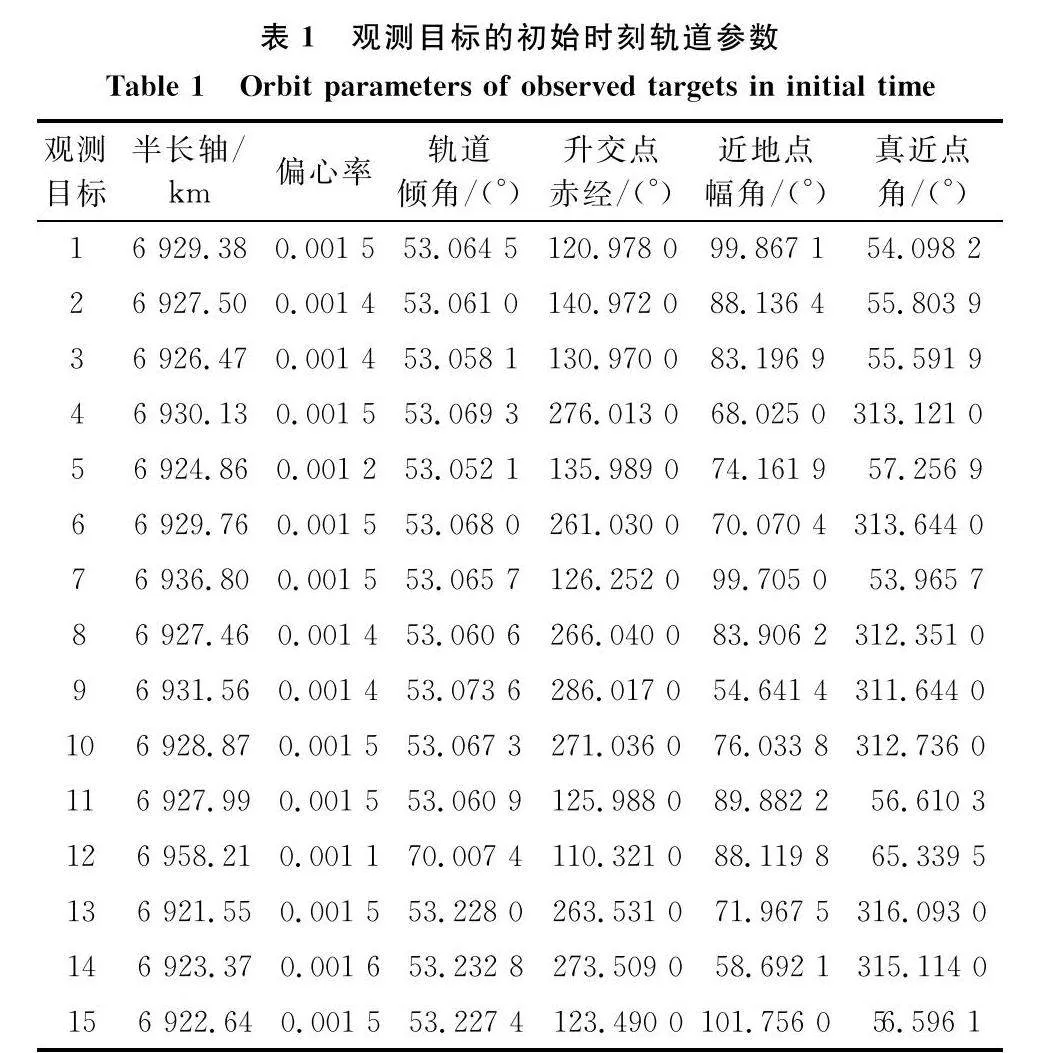
本文選取2022年6月7日18時局部區(qū)域下一星座的15顆衛(wèi)星作為觀測目標進行算法驗證,這些衛(wèi)星公開的初始軌道六根數(shù)如表1所示。
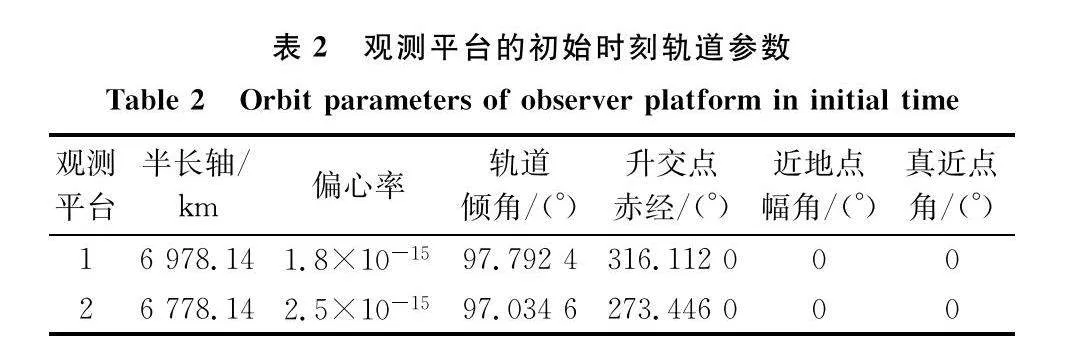
由于晨昏軌道上的衛(wèi)星對地球方向觀測時,太陽光照角幾乎相同、視野極廣,可以實現(xiàn)地球全天候、多角度的監(jiān)測和探測,在工程實際中,常用作地球觀測、監(jiān)測偵察等應(yīng)用。本文假設(shè)觀測平臺由兩顆運行在晨昏軌道的光學(xué)衛(wèi)星組成,初始軌道六根數(shù)如表2所示。假設(shè)兩觀測平臺之間可以相互通信,且觀測與交流不受到地球遮擋等約束影響,僅通過仿真討論所提方法的協(xié)同跟蹤有效性。設(shè)共識率為0.425;傳感器測角分辨率為0.005 rad,測量輸出的頻率為1 Hz;設(shè)置共識迭代次數(shù)為3,高斯裁剪閾值為10-4,高斯合并閾值為4,高斯混合PHD濾波的提取閾值為0.5。
3.2 跟蹤性能對比仿真
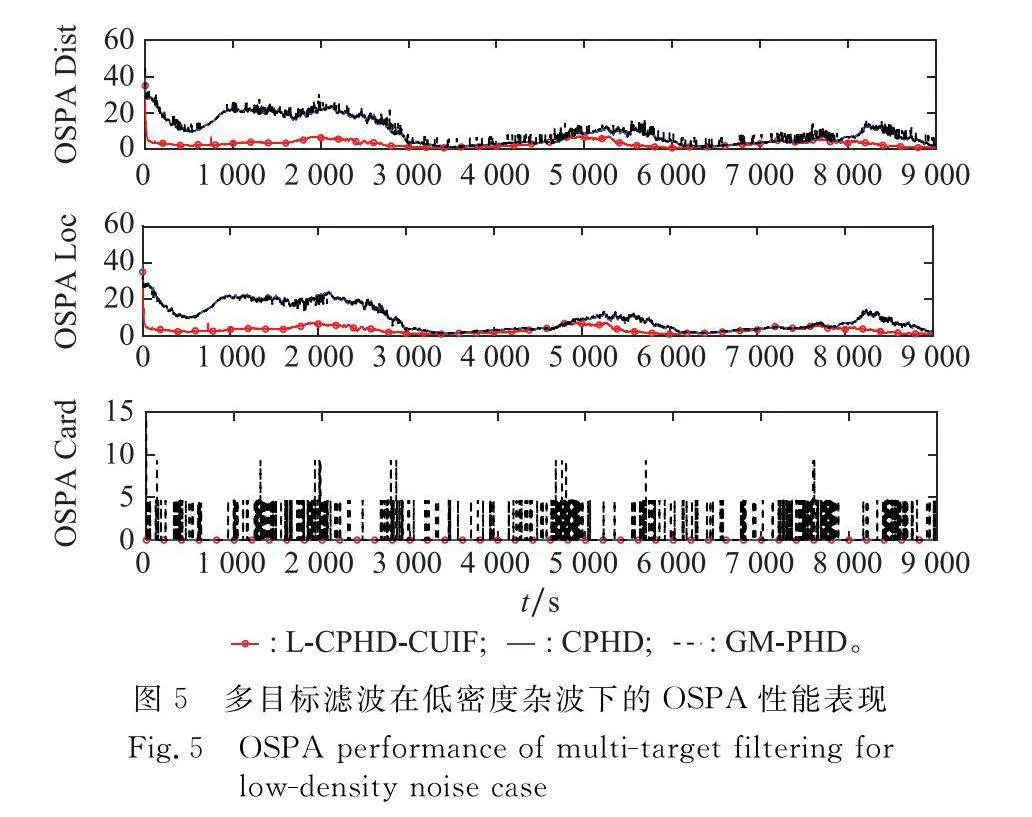
為了充分驗證所提算法的長期性能,設(shè)定仿真時長為9 000 s(覆蓋時間超過了1個軌道周期),設(shè)定仿真步長為1 s,對比使用CPHD與L-CPHD-CUIF在最優(yōu)子模式分配(optimal sub-pattern assignment, OSPA)下的性能表現(xiàn),OSPA的具體定義可參見文獻[31]。OSPA評估方法將誤差解釋為3個部分,即距離OSPA(OSPA distance, OSPA Dist),位置OSPA(OSPA location, OSPA Loc)與勢OSPA(OSPA cardinality, OSPA Card)。OSPA Dist是OSPA性能總體表現(xiàn)情況,OSPA Loc反應(yīng)整體的距離誤差水平,OSPA Card為估計目標數(shù)目的精準情況。這3個指標越小,跟蹤性能越好。下面的仿真分析將主要以這3個指標對跟蹤性能進行評價。
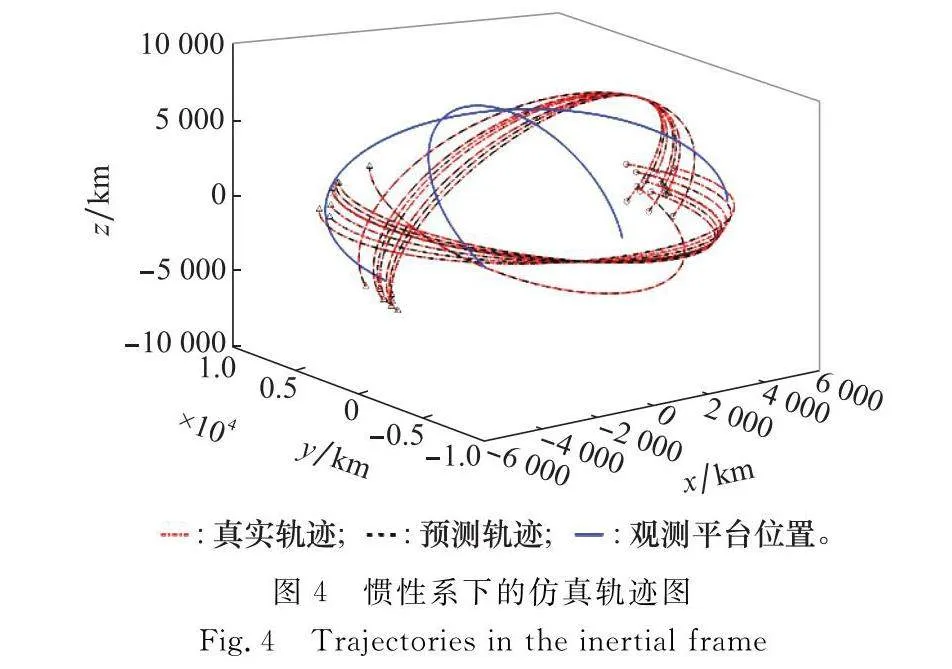
慣性系下整體仿真效果如圖4所示,由于曲線過多且仿真時間較長,這里僅展示前1 h的軌跡曲線。由圖4可見,基于所提方法能精確地完成多目標的無源跟蹤任務(wù)。考慮到實際環(huán)境中雜波情況更為復(fù)雜,即在不同載荷、不同工作環(huán)境、不同觀測區(qū)域中,雜波數(shù)目皆有可能不相同,所以設(shè)計了兩種典型的工況,接下來將在不相同雜波密度條件下分析這兩種工況下的濾波跟蹤性能。
工況1 設(shè)平均雜波數(shù)目為10,初始時刻目標位置誤差為70 km,跟蹤性能指標如圖5所示。由圖5可知,高斯混合概率(Gaussian mixture probability hypothesis density, GM-PHD)濾波器的數(shù)目估計時常出現(xiàn)誤差,而采用勢分布函數(shù)時目標數(shù)目估計精度大幅度提高,但狀態(tài)估計精度是相差無幾的。而采用L-CPHD-CUIF不僅在數(shù)目估計上非常精準,而且在狀態(tài)估計上收斂速度加快。此外,在觀測位置不佳時段(如700~1 000 s),波動幅度也非常有限,尤其在初始跟蹤階段收斂速度更快,優(yōu)勢明顯。而在整個仿真的9 000 s內(nèi),本文方法跟蹤性能超過CPHD 60%的時間段,為4 030 s,占總仿真時長的44.78%,僅有0.23%的時間段遜色于CPHD,誤差整體提升了62.53%。
工況2 設(shè)平均雜波數(shù)目為70,初始時刻目標位置誤差為70 km, L-CPHD-CUIF與分別來自跟蹤衛(wèi)星平臺S1和S2的CPHD的性能表現(xiàn)如圖6所示。由于雜波數(shù)目較多,CPHD在初始時刻出現(xiàn)偶發(fā)性目標丟失或目標誤判的情形,而雙平臺協(xié)同跟蹤數(shù)目估計依舊十分精準,且通過一致性交流雙平臺修正己方的估計結(jié)果,使初始誤差迅速下降,即便在高密度雜波的干擾下也很少出現(xiàn)誤識別情形。圖5與圖6中不同平臺的CPHD數(shù)目估計和狀態(tài)估計結(jié)果皆劣于L-CPHD-CUIF,總體上提升效果高于60%的時間段占總仿真時長的52.69%,而遜色于CPHD的時間段僅有4.3%,誤差整體提升了66.5%,證明了所提協(xié)同方案的有效性。
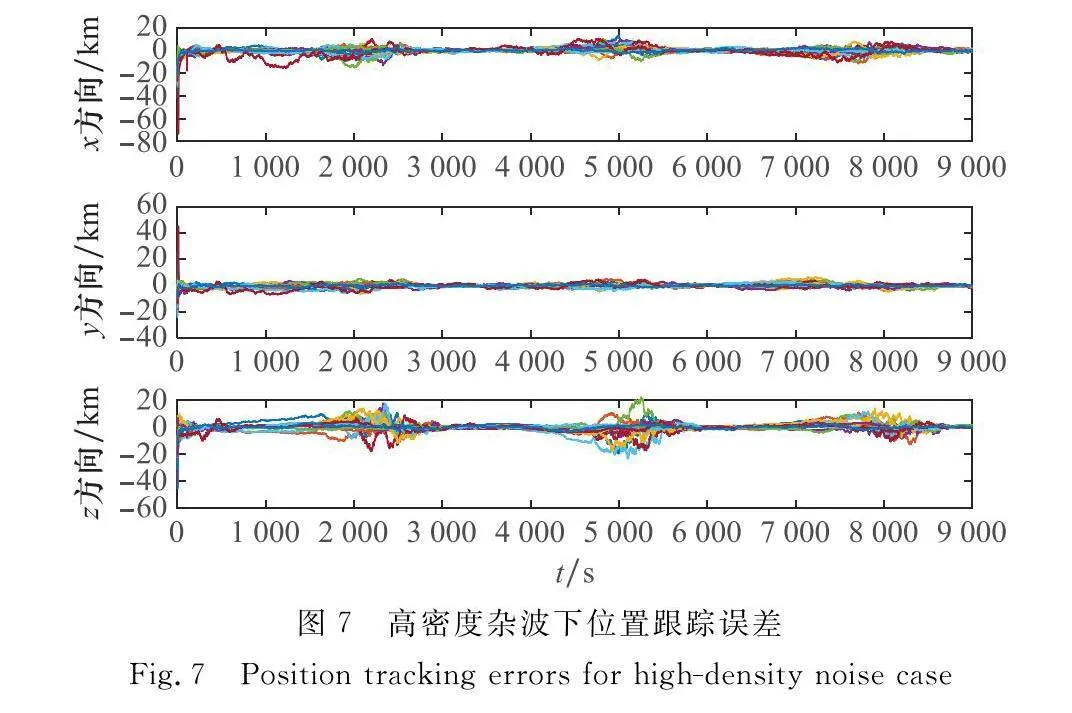
圖7展示了本文所提方法在高密度雜波條件下的跟蹤誤差,其中大部分時刻大部分目標的位置跟蹤誤差都在5 km內(nèi),而在2 000 s、5 000 s和8 000 s左右部分目標的跟蹤誤差出現(xiàn)了較大幅度的跳變,最大超過了20 km。這是由于兩顆協(xié)同觀測平臺以及對應(yīng)目標位置處于同一直線、協(xié)同觀測的幾何構(gòu)型不佳導(dǎo)致的,這可以用單目標無源協(xié)同跟蹤的可觀測性理論解釋[20]。此外,多目標跟蹤中存在個別奇異時刻,由于實際跟蹤存在虛警與漏測,即目標測量未檢測到的同時,又出現(xiàn)虛警雜波,此時濾波誤差將會進一步變大。
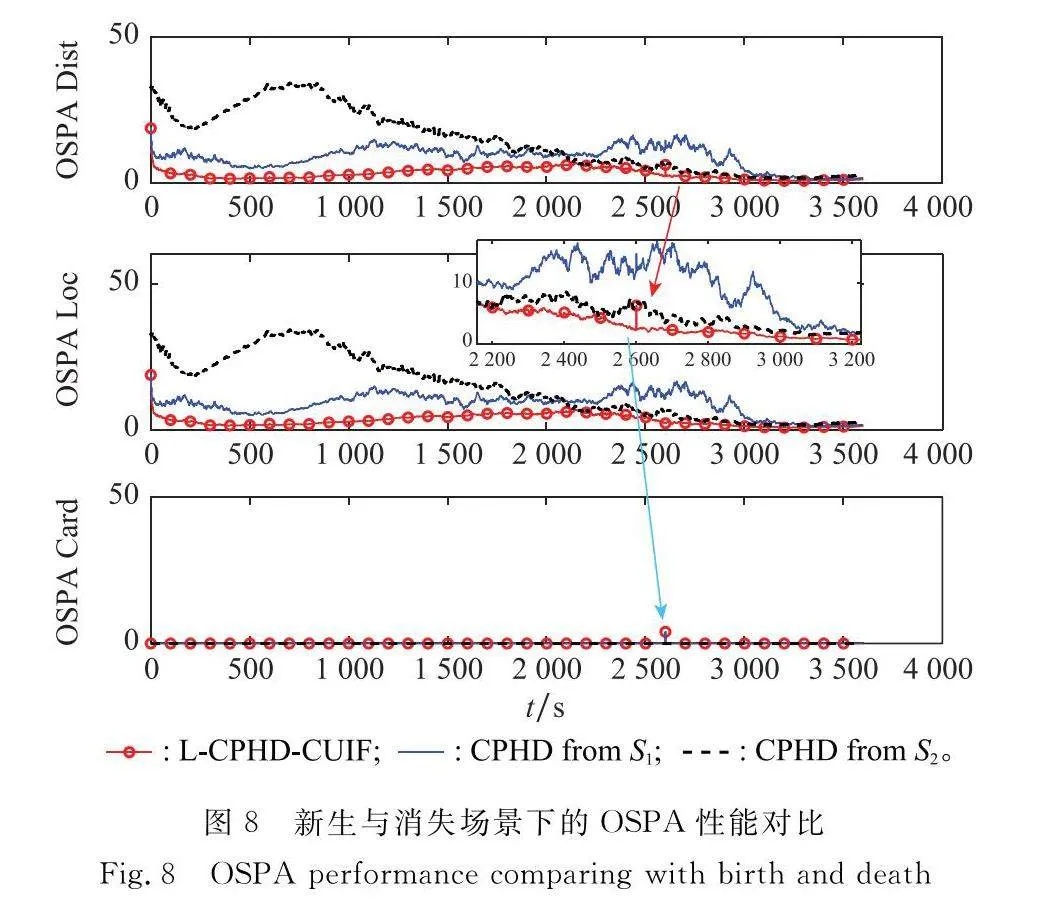
3.3 目標新生與消失的對比仿真
采用上述相同目標參數(shù)和相同觀測平臺,假設(shè)目標13在2 600 s出現(xiàn)較大機動,直接從雙觀測平臺的視場中消失,而目標14和目標15分別在第110 s與第600 s同時出現(xiàn)在視場當(dāng)中。這里要說明的是,星座小衛(wèi)星大多采用電推力機動,很難瞬間消失在視場中,本文僅做假設(shè)來驗證目標消失場景下的跟蹤能力;其次,當(dāng)目標14和目標15不同時出現(xiàn)在視場中,可以不進行信息交流融合,本文不做討論。此外,目標的新生狀態(tài)一般由天基或地基觀測平臺探測識別后通過初始定軌方法獲取。而本文重點研究多目標軌道跟蹤方法本身,因此當(dāng)新生目標出現(xiàn)時,默認可以通過星載自主或地面上行獲得目標的初始軌道信息。
本文所提方法面對目標新生與消失場合下的監(jiān)視能力如圖8所示。由圖8可見,當(dāng)目標消失時,并沒有出現(xiàn)波動,這是由于目標同時在兩顆衛(wèi)星平臺的視場中消失,未檢測到相關(guān)測量,且算法上目標數(shù)目得到了更新,誤差圖未發(fā)生波動。當(dāng)2 600 s時出現(xiàn)目標新生,所提算法在數(shù)目估計上出現(xiàn)波動,而算法上未能在該時刻檢測到新生目標,因此分別在OSPA Dist和OSPA Card的仿真圖上有所體現(xiàn),出現(xiàn)數(shù)目估計誤差。
4 結(jié)束語
本文針對巨型星座群等空間非合作目標無源跟蹤問題,提出一種天基多平臺對多目標的一致性無源跟蹤新方法,通過數(shù)值仿真驗證了有效性,并與現(xiàn)有的多種方法進行了性能對比分析,主要結(jié)論如下。
(1) 在天基無源跟蹤場景下,提出一種多平臺分布式協(xié)同的L-CPHD-CUIF濾波跟蹤估計方法,該方法通過一致性信息濾波修正高斯分量。仿真結(jié)果表明在高密度雜波的場景下,L-CPHD-CUIF對目標數(shù)目的估計依舊準確。
(2) 與現(xiàn)有的協(xié)同跟蹤方法相比,本文提出的L-CPHD-CUIF方法不僅減少了信息交流量,降低了融合計算難度,還通過信息交流達成一致性,提升了狀態(tài)估計精度。在不同雜波環(huán)境下的仿真結(jié)果表明,所提方法的跟蹤性能提升了60%以上。
(3) 基于本文提出的L-CPHD-CUIF方法可以實現(xiàn)15個空間目標的跟蹤,仿真驗證了該方法在目標新生和消失場景下的跟蹤能力。
盡管本文僅以晨昏軌道觀測平臺對星座目標的跟蹤為例驗證了所提方法的有效性,但是不影響該方法在其他觀測軌道上的泛化應(yīng)用,只需要針對性地調(diào)整部分閾值參數(shù)。后續(xù)的研究工作可以從解決多平臺協(xié)同觀測幾何構(gòu)型奇異性問題、任務(wù)規(guī)劃與觀測資源調(diào)度等方向展開。
參考文獻
[1]CAI H, YANG Y, GEHLY S, et al. Sensor tasking for search and catalog maintenance of geosynchronous space objects[J]. Acta Astronautica, 2020, 175: 234-248.
[2]HU Y P, LI K B, LIANG Y G, et al. Review on strategies of space-based optical space situational awareness[J]. Journal of Systems Engineering and Electronics, 2021, 32(5): 1152-1166.
[3]ZHANG Y J, WANG J Q, HOU B W, et al. Optimal maneuvering strategy of spacecraft evasion based on angles-only measurement and observability analysis[J]. Journal of Systems Engineering and Electronics, 2023, 34(1): 172-184.
[4]龔柏春, 金鑫, 張仁勇, 等. 基于相對角動量的空間非合作目標機動僅測角檢測方法[J]. 系統(tǒng)工程與電子技術(shù), 2023, 45(3): 814-821.
GONG B C, JIN X, ZHANG R Y, et al. Angle-only measurement maneuver detecting method for space non-cooperative target based on relative angular momentum[J]. Systems Engineering and Electronics, 2023, 45(3): 814-821.
[5]JIANG K, ZHOU J J, LYU R G, et al. Multi-target tracking algorithm of vehicle-mounted millimeter-wave radar based on IMM-JPDA-STUKF[C]∥Proc.of the 4th International Confe-rence on Electronic Engineering and Informatics, 2022.
[6]MORAWSKA B, LIPINSKI P, LICHY K, et al. Transfer learning-based UWB indoor localization using MHT-MDC and clusterization-based sparse fingerprinting[J]. Journal of Computational Science, 2022, 61: 101654.
[7]LINDENMAIER L, ARADI S, BECSI T, et al. GM-PHD filter based sensor data fusion for automotive frontal perception system[J]. IEEE Trans.on Vehicular Technology, 2022, 71(7): 7215-7229.
[8]XU C A, YAO L B, LIU Y, et al. A novel SMC-PHD filter for multi-target tracking without clustering[J]. Displays, 2022, 71: 102113.
[9]LI T, HLAWATSCH F. A distributed particle-PHD filter using arithmetic-average fusion of Gaussian mixture parameters[J]. Information Fusion, 2021, 73: 111-124.
[10]GARCIA-FERNANDEZ A F, RALPH J, HORRIDGE P, et al. Gaussian trajectory PMBM filter with nonlinear measurements based on posterior linearisation[C]∥Proc.of the IEEE 25th International Conference on Information Fusion, 2022.
[11]WANG Y, RAO P, CHEN X. Robust PMBM filter with unknown detection probability based on feature estimation[J]. Sensors, 2022, 22(10): 3730.
[12]LI G C, KONG L J, YI W, et al. Multiple model Poisson multi-Bernoulli mixture filter for maneuvering targets[J]. IEEE Sensors Journal, 2020, 21(3): 3143-3154.
[13]HUANG Q, XIE L, SU H Y. Estimations of time-varying birth cardinality distribution and birth intensity in Gaussian mixture CPHD filter for multi-target tracking[J]. Signal Processing, 2022, 190: 108321.
[14]KIM S Y, KANG C H, PARK C G. SMC-CPHD filter with adaptive survival probability for multiple frequency tracking[J]. Applied Sciences, 2022, 12(3): 1369.
[15]LEONARD M R, ZOUBIR A M. Multi-target tracking in distributed sensor networks using particle PHD filters[J]. Signal Processing, 2019, 159: 130-146.
[16]LIU Z, JI L N, YANG F B, et al. Cubature information Gaussian mixture probability hypothesis density approach for multi extended target tracking[J]. IEEE Access, 2019, 7: 103678-103692.
[17]KIM H, GRANSTROM K, GAO L, et al. 5G mmWave coope-rative positioning and mapping using multi-model PHD filter and map fusion[J]. IEEE Trans.on Wireless Communications, 2020, 19(6): 3782-3795.
[18]TANG T, HONG T, HONG H H, et al. An improved UAV-PHD filter-based trajectory tracking algorithm for multi-UAVs in future 5G IoT scenarios[J]. Electronics, 2019, 8(10): 1188.
[19]KIM H, GRANSTROM K, SVENSSON L, et al. PMBM-based SLAM filters in 5G mmWave vehicular networks[J]. IEEE Trans.on Vehicular Technology, 2022, 71(8): 8646-8661.
[20]GONG B C, WANG S, LI S, et al. Review of space relative navigation based on angles-only measurements[J]. Astrodynamics, 2023, 7(2): 131-152.
[21]何友, 姚力波, 李剛, 等. 多源衛(wèi)星信息在軌融合處理分析與展望[J]. 宇航學(xué)報, 2021, 42(1): 1-10.
HE Y, YAO L B, LI G, et al. Summary and future development of on-board information fusion for multi-satellite collaborative observation[J]. Journal of Astronautics, 2021, 42(1): 1-10.
[22]LI G, BATTISTELLI G, YI W, et al. Distributed multi-sensor multi-view fusion based on generalized covariance intersection[J]. Signal Processing, 2020, 166: 107246.
[23]丁自然, 劉瑜, 曲建躍, 等. 基于節(jié)點通信度的信息加權(quán)一致性濾波[J]. 系統(tǒng)工程與電子技術(shù), 2020, 42(10): 2181-2188.
DING Z R, LIU Y, QU J Y, et al. Information weighted consensus filter algorithm based on node communication degree[J]. Systems Engineering and Electronics, 2020, 42(10): 2181-2188.
[24]MILLAN P, ORIHUELA L, VIVAS C, et al. Distributed consensus-based estimation considering network induced delays and dropouts[J]. Automatica, 2012, 48(10): 2726-2729.
[25]LI Z, WANG Y D, ZHENG W. Adaptive consensus-based unscented information filter for distributed space target tracking[C]∥Proc.of the 5th Chinese Conference on Swarm Intelligence and Cooperative Control, 2023: 964-974.
[26]LIU J, LIU Y, DONG K, et al. Distributed hybrid consensus-based square-root cubature quadrature information filter and its application to maneuvering target tracking[J]. International Journal of Distributed Sensor Networks, 2019, 15(12): 155014771989595.
[27]CURTIS H D. Orbital mechanics for engineering students[M]. Oxford: Butterworth-Heinemann, 2013.
[28]靳旭紅, 黃飛, 程曉麗, 等. 超低地球軌道衛(wèi)星大氣阻力預(yù)測與影響因素分析[J]. 清華大學(xué)學(xué)報(自然科學(xué)版), 2020, 60(3): 219-226.
JIN X H, HUANG F, CHENG X L, et al. Atmospheric drag on satellites flying in lower low-earth orbit[J]. Journal of Tsinghua University (Science and Technology), 2020, 60(3): 219-226.
[29]FELDMAN D, SCHMIDT M, SOHLER C. Turning big data into tiny data: constant-size coresets for K-means, PCA, and projective clustering[J]. SIAM Journal on Computing, 2020, 49(3): 601-657.
[30]LIU G L, TIAN G H. Square-root sigma-point information consensus filters for distributed nonlinear estimation[J]. Sensors, 2017, 17(4): 800.
[31]RISTIC B, VO B N, CLARK D, et al. A metric for perfor-mance evaluation of multi-target tracking algorithms[J]. IEEE Trans.on Signal Processing, 2011, 59(7): 3452-3457.
作者簡介
江林海(1998—),男,碩士研究生,主要研究方向為空間多目標跟蹤定軌。
龔柏春(1987—),男,副研究員,碩士研究生導(dǎo)師,博士,主要研究方向為空間非合作目標態(tài)勢感知、飛行器集群導(dǎo)航與控制。
劉傳凱(1983—),男,高級工程師,博士,主要研究方向為視覺導(dǎo)航、空間機械臂操作規(guī)劃。
YANG Yang(1988—),男,講師,博士,主要研究方向為空間飛行導(dǎo)航、態(tài)勢感知。
張仁勇(1984—),男,副研究員,博士,主要研究方向為軌道動力學(xué)與控制。
