基于西門子傳動裝置的電機匹配性優化研究與探討
2024-11-13 00:00:00齊賦寧王西錄劉偉馮春飛
石油工程建設 2024年7期













摘" " 要:西門子大型傳動裝置是目前海洋鉆井平臺中鉆井關鍵設備配套最多的裝置,傳動裝置與電機的匹配性越好,控制就越平滑、越精準,這對鉆井設備的平穩運行至關重要。對西門子傳動裝置與鉆井絞車、頂驅和泥漿泵電機的匹配性進行了優化研究,以海洋鉆井平臺采用最多的西門子S120系列傳動裝置與電機匹配性優化研究為實例,詳細分析了傳動裝置與電機匹配性優化的意義、目的、必要條件、實現思路、優化方法、途徑和流程,并結合傳動裝置與電機匹配性優化處理的具體實例進行探討,以期為鉆井關鍵設備的平穩運行提供技術指導和參考依據。
關鍵詞:傳動裝置;電機;匹配性優化;辨識;西門子S120系列
Motor matching optimization based on Siemens transmission device
QI Funing,WANG Xilu, LIU Wei, FENG Chunfei
Drilling Branch of China" Petroleum Offshore Engineering Company Limited, Tianjin 300451, China
Abstract:Siemens large transmission device is currently the most widely equipped device for key drilling equipment on offshore drilling platforms. If the transmission device and motor match better, control will be smoother and more precise, which is crucial for the smooth operation of drilling equipment. Therefore, optimization analysis was conducted on the matching between Siemens transmission device and drilling winches, top drives, as well as mud pump motors. Matching optimization analysis between the Siemens S120 series transmission device, the most commonly used typeon offshore platforms,and the motor was taken as an example to illustrate the significance, purpose, necessary conditions, implementation ideas, methods, approaches, and processes of matching optimization between Siemens transmissiondevice and motors in detail. Besides, the discussion was carried out with specific examples of matching optimization between transmissiondevices and motors to provide technical guidance and a reference basis for the smooth operation of key drilling equipment.
Keywords:transmission device; motor; matchingoptimization; identification; Siemens S120 series
隨著海洋裝備自動化程度越來越高,鉆井關鍵設備使用的電機功率越來越大,對控制的要求越來越多。為了實現更加平滑和精準的控制效果,多數采用大型變頻傳動裝置和變頻交流電機的組合方式。目前海洋鉆井平臺中鉆井關鍵設備大多采用主流的西門子S120系列變頻傳動裝置,以實現精準控制電機速度、轉矩和位置等運行參數的目的,使電機輸出的功率和效率達到最優狀態。如何通過西門子變頻傳動裝置實現對電機的匹配性優化,使其精準和平穩地控制電機,保障鉆井生產順利進行,是本文研究的主要目標。為此需要掌握西門子傳動裝置優化電機的原理、優化方法和注意事項,通過優化能夠更加有效地控制電機,從而提高電機的性能和穩定性,這對于做好鉆井關鍵設備的維護工作至關重要。
1" " 電機匹配性優化的必要性及原理
1.1" " 電機匹配性優化的必要性
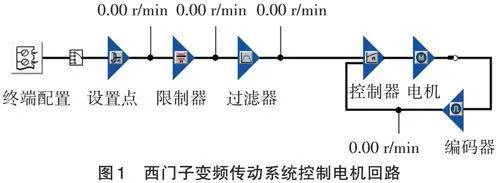
電機的工作環境和負載特性會影響電機的運行參數,而這些參數的變化會直接影響電機的控制效果和性能。因此,通過西門子變頻裝置,對配套電機的參數進行匹配性優化是非常重要的。通過對電機匹配性優化,實現對電機參數的測量和分析,測量電機的電氣特性、機械特性及靜態和動態參數等。這些參數是電機設計和調試的重要依據,也是電機維護和故障診斷的重要參考數據。通過電機匹配性優化,西門子變頻傳動裝置可以更好地控制電機的速度、轉矩和位置等參數,使電機達到最佳狀態,提高電機的穩定性和精準性能。西門子變頻傳動系統控制電機回路如圖1所示。
1.2" " 電機匹配性優化原理
任何電控系統都可以看成一個具有輸入和輸出參數的模型,而且真實系統嚴格來說是非線性且時變的。西門子變頻傳動裝置的電氣控制其實也是一種模型。在絕大多數情況下,通過機理分析很難獲得真實模型,即使能夠獲得,也極其復雜且無法使用。在這種情況下,通過對電機的匹配性辨識優化,構建一個虛擬電機等效模型,該模型的復雜度在可接受范圍內,能夠基本反映真實系統的特征,且通過構建該等效模型,可實現對電機性能的穩定、精準、平順控制,這就是對電機進行匹配性優化的最終目的。
采用西門子變頻器傳動裝置,對電機進行匹配性優化的基本原理是:通過建立一個由電機功率模塊、電纜的阻抗感抗、電機等部件構成的虛擬電機等效模型,從而實現對電機的匹配性優化。電機匹配性優化等效模型如圖2所示。
2" " 優化條件、方法和途徑
2.1" " 電機匹配性優化的條件
采用西門子變頻傳動裝置,對電機進行匹配性優化需要基于一定條件和前提。明確這些條件與前提十分重要,可以避免一些不必要的問題和故障,從而能夠實現更好的電機控制效果。
1)新配置變頻器及電機。對于新配置的變頻器和電機,在控制系統中必須要按照流程逐步開展電機匹配性優化,此外還需要在電機優化前進行必要的程序參數設置,而后才能開始電機優化流程。
2)更換不同規格型號的變頻器或者同一型號變頻器的控制參數改變較大。如果更換變頻器,無論是更換不同型號變頻器,還是使用相同型號而參數改變較大,例如輸出電壓、頻率、V/F曲線等參數發生較大改變時,建議重新進行電機優化。因為變頻器的參數設定會直接影響到電機的運行,如果電機的參數與變頻器設定的參數不匹配,那么依據原變頻器或參數構建的電機等效模型已經不適用,此時如果不進行匹配性優化而直接運行,可能會導致電機運行不穩定,從而危及整體設備的正常運行,甚至發生機械事故。
3)更換不同型號的電機,或者維修后的電機內部繞組、轉子組件和參數有較大變動。如果更換不同型號的電機,或者維修改變內部組件而導致參數有了較大變動,那么需要重新進行電機優化。因為不同型號的電機在轉矩特性、電阻、電感、慣量等方面存在差異,如果不重新進行電機辨識,則可能導致電機的運行效果不佳,甚至出現設備運行故障。
4)影響等效電機模型的其他因素也應作為必須對電機重新進行匹配性優化的考慮點。比如當電機或變頻器進行較大范圍的相對移位,導致其所使用的電纜長度有較大變化時,等效模型中電纜阻抗和感抗參數則有明顯變化,此時建議重新進行電機優化;如果電機配有編碼器作為速度環反饋信號,那么當因更換不同類型的編碼器而導致速度環控制環節參數有明顯變化時,也要進行電機匹配性優化,以實現更好的控制效果。
2.2" " 電機匹配性優化的基本方法
基于西門子變頻傳動裝置電機匹配性優化的基本過程分為兩步:第一步,通過對電機的測量,以及對動態運行數據的分析來獲得電機的各種參數值,主要包括電機的電感、電阻、轉動慣量和摩擦系數等參數。這些參數值對于電機的控制至關重要,因為電機的運行狀態和控制效果都與這些參數密切相關。第二步,在測試中,通過對這些動態運行參數值進行不斷優化識別,構建出匹配性高的等效模型。
對電機匹配性進行優化的方法很多,目前在海洋鉆井作業現場關鍵設備上使用的方法主要分為模型法和非模型法兩種。其中,模型法是指先對關鍵設備電機建立動態模型,再利用實驗數據進行參數優化;非模型法則是指先將電機作為一個黑盒進行測試,而后通過實驗數據進行專項內容的參數優化。無論采用哪種方法,都需要通過大量的實驗和數據處理才能得到準確的參數值。目前海洋鉆井關鍵設備主要采用模型法進行電機匹配性優化,另外根據現場需求,在傳動裝置基于轉速控制的矢量模式下,必要時通過對速度環參數等專項參數進行微調,由此進行特殊優化,從而使電機輸出更加符合現場使用需求。變頻傳動裝置對電機的控制模式及邏輯關系如圖3所示。
2.3" " 電機匹配性優化的途徑
基于西門子變頻傳動裝置的電機匹配性優化需要通過控制終端來實現優化命令,通過控制系統完成由功率單元、電纜、電機及編碼器等組件構成等效電機模型。目前現場較多使用西門子S120系列變頻傳動裝置,可采用以下兩種途徑實現對電機的匹配性優化。
1)使用西門子S120系列逆變控制單元上的本地操作面板AOP30(見圖4)。這種控制面板是通過RS232串行通訊方式連接到控制裝置上,實現對變頻傳動裝置的參數設定、狀態數據顯示、調試維修、控制驅動和診斷故障報警等功能。電機匹配性優化是通過該控制面板的調試維修選項,使變頻傳動裝置進入設備調試狀態來實現。需要注意的是,在激活操作鎖或參數設置鎖后,AOP會自動執行一次“從RAM復制到ROM”,將已經完成的優化參數設置備份在西門子變頻裝置控制器CU320的存儲卡中。
2)安裝使用西門子Starter軟件的PC端。Starter軟件(見圖5)是西門子變頻驅動裝置的專業調試軟件,能夠實現在線監控、修改裝置參數、故障檢測和復位,以及跟蹤記錄功能[1]。在實際調試時,推薦使用Starter軟件進行電機匹配性優化,該軟件能較好地實現西門子傳動系統對電機進行匹配性優化的實時監測和記錄,對優化前后的數據進行分析對比,判斷優化結果是否達到控制要求。
3" " 電機匹配性優化的調試要點及實現過程分析
3.1" " 前置條件和調試環境
根據海洋鉆井平臺傳動配置的特點,絞車、頂驅配置直剎車系統和速度反饋,泥漿泵無剎車系統和速度反饋。針對現場配置情況,實際工作中進行電機匹配性優化時需要注意,對絞車和頂驅電機進行匹配性優化的電氣硬件前置條件是:電機處于冷態、電機無抱閘或者抱閘必須強制松開(可通過Starter軟件將調試參數p1215設置為2,實現抱閘的強制松開),以確保機械系統無危險。電機在進行優化過程中,可能會引起某些部件轉動而造成人員受傷,應禁止無關人員在電機周圍逗留,并確保轉動部件無松動,同時必須保證緊急停機功能運行正常。
電機靜態優化測量應該在尚未啟動運行的電機上執行。估算執行測量時電機的環境溫度,并輸入到p0625中;如果使用的是KTY傳感器,需設置p0600、p0601,并讀取r0035,該值是熱電機模型和熱RS/RR適配的參考值。
對于控制系統的參數設置,需要提前將電機銘牌信息輸入至控制系統對應的電機額定信息參數項中。另外,需要明確進行電機匹配性優化的變頻器工作模式,這將決定優化控制參數的不同選擇,否則將出現優化問題[2]。目前海洋鉆井平臺通常設置的變頻器工作模式有兩種,頂驅和絞車變頻器工作模式p1300=21(轉速控制,帶編碼器形式),泥漿泵的變頻器工作模式p1300=20(轉速控制,采用無編碼器運行模式,見圖6)。
在進行電機匹配性優化前,應確認使用西門子變頻傳動裝置時的模式設置是功率單元模式還是工藝應用模式。目前針對海洋鉆井平臺推薦功率單元模式設置p0205=0、工藝應用模式設置p0500=0。
功率單元模式設置p0205=0,變頻器為重過載工作模式,用于矢量驅動。如圖7所示,即在一個工作周期中,達到150%的基本負載電流時變頻器過載60 s,達到160%時過載10 s。一旦修改該參數,所有電機參數和閉環控制單元都會根據所選應用自動設定。該參數不會影響到熱過載的計算。
設置工藝應用模式p0500=0為標準驅動(矢量),如圖8所示,該參數會影響p0578觸發的開環控制和閉環控制參數的計算。
p0500=0時,設置以下參數觸發計算:p1574=10 V(他勵同步電機:20 V),設置一個動態電壓裕量;p1750.2=0,設置電機模型的配置;p1802=4(RZM/FLB無過調制),設置調制模式;p1803=106%,定義最大的占空比。
3.2" " 調試要點
根據目前海洋鉆井平臺采用西門子S120變頻傳動裝置的特點,通常完成電機的匹配性優化分為四步,首先是確認運行環境和條件滿足優化要求,然后進行電機靜態優化和動態優化,最后測試運行效果,若還需要進一步精準調節,可對個別參數進行特定優化。整個調試過程中,最關鍵的是電機靜態和動態優化過程。所謂靜態優化也可以稱為靜態計算,就是把電機銘牌數據輸入作為變頻控制器參數,并進行電機等效模型建立和計算。在這個過程中電機不通電,只是進行控制器的參數計算;電機動態優化,是在電機通電啟動并運行時進行電機電流測試,且通過測試結果確定系統摩擦與慣性數據,確定電機運行狀態磁化曲線,確定控制系統速度調節器PI時間常數,從而對電機等效模型進行計算修正。
綜上所述,對西門子傳動控制的調試,在進行靜態優化時建議以電機轉子軸空軸測試為最佳,以便更好地對電機控制參數進行識別,建立更加符合電機參數的模型;而在進行動態優化時建議帶上電機轉子軸傳動系,空載模式下測試最佳。如果電機輸出軸懸空,沒有帶上傳動系,在電機匹配性優化的摩擦、慣性、速度調節器PI參數的識別上就會出現差別,進而對控制的精度和平順度產生影響。
經過實測,帶上電機輸出軸負載進行動態優化的效果會更好。前提是機械傳動部分允許電機自由轉動,且能夠承受急加速。如機械方面不允許脫掉負載,電機靜態優化帶載后,手動優化速度環參數,也可以達到控制要求。
3.3" " 電機靜態優化的數據項點和實現過程
為了獲取更加精準的優化數據,在現場進行電機靜態優化前需要特別注意以下幾點:第一,由于銘牌數據是用于電機識別的初始化值,所以為確定電機信息參數,應正確、一致地輸入銘牌數據,并采用正確的連接方式(星形/三角形)。第二,如果電機動力線的電阻已知,最好在靜態測量(p1910)開始前輸入該電阻(p0352),這樣在計算定子電阻p0350時,便可以將其從測得的總電阻中扣除。并且在輸入該電阻后,較長電纜上熱電阻的適配精度也會有所提高。尤其在無編碼器的矢量控制中,該精度會影響低轉速時的特性。第三,如果具備一個輸出濾波器(參見p0230)或串聯電感(p0353),同樣也應在靜態測量開始前輸入相應數據。該電感會因此從測得的總漏電感中扣除。如果采用的是正弦濾波器,則只測量定子電阻、閥門閾值電壓和閥門閉鎖時間即可。
在進行電機靜態優化時(見圖9、圖10),采用p1910的電機數據識別在靜止狀態下測定的電機參數:等效電路圖數據p1910=1,勵磁特性曲線p1910=3。電機靜態優化完成后p1910自動復位為“0”(識別成功),或輸出故障信息F07990。執行p1910過程需要使用變頻器,在電機靜態優化識別過程中,變頻器有輸出電壓、輸出電流;電機可能會略微轉動,轉動最大90°;軸端無轉矩[3]。
為滿足控制技術方面的需要,建議進行電機數據優化識別,因為從銘牌數據上僅可估算等效電路圖數據和電機電纜電阻[4]。例如,如果要使無編碼器的矢量控制保持穩定,或者要在V/F曲線控制中升高電壓,則定子的電阻尤其重要。如果電源線較長,或者使用其他廠家的電機,就必須執行電機數據識別。在開始第一次電機數據識別時,會根據銘牌數據(額定數據)使用P1910=1或3,確定如表1所示的電機優化數據。
除了通過p1910=1得到等效電路圖數據,還要通過電機數據識別(p1910=3),確定異步電機的勵磁特性曲線。由于該特性曲線的精度較高,所以應盡量在電機動態優化中確定該特性曲線(不帶編碼器時,p1960=1,3;帶編碼器時:p1960=2,4);對于需要弱磁工作的電機,在有編碼器的矢量控制VC方式下,可以選擇電機磁化曲線,計算p1910=3(計算磁化曲線磁通和勵磁電流p0362~p0369),當驅動在弱磁范圍中運行,尤其在矢量控制中,應確定該特性曲線。借助勵磁特性曲線,可以更精確地計算出弱磁運行范圍中的場電流,并由此獲得更高的轉矩精度。與靜態測量(p1910)相比,通過電機動態優化旋轉測量(p1960),能夠更精準地確定異步電機的額定勵磁電流及飽和特性曲線[5],如圖11所示。
3.4" " 電機動態優化的數據項點和實現過程
與電機靜態數據優化相比,電機動態優化的主要區別在于,會對轉速控制器優化,在優化中會確定驅動的轉動慣量并設置轉速控制器。此外,電機動態優化還會確定異步電機的飽和特性曲線和額定勵磁電流。
在電機動態優化期間,驅動不會加速到額定轉速(p0310),而是加速到在p1965中設置的某個額定轉速百分比值,該值的出廠設置為40%。在開始測量之前,可對該參數進行調整,此時推薦設置較高的轉速。同樣也可以修改p1961中的轉速,飽和特性曲線的確定和編碼器測試將在該轉速下進行。
在進行異步電機動態優化時應采取以下步驟:在接入負載前,應執行完整的“電機動態識別”;p1960=1(不帶編碼器)或p1960=2(帶編碼器)。由于此時異步電機空載,因此可以得到更準確的飽和特性曲線和額定勵磁電流;接入負載后,應基于已經改變的總轉動慣量,再次執行電機轉速控制器優化。選擇參數p1960=3(不帶編碼器)或p1960=4(帶編碼器),便可以執行電機轉速控制優化。在執行轉速控制器優化時,會自動取消參數p1959中的飽和特性曲線記錄功能,如圖12、圖13所示。
通過電機動態優化執行p1960,動作完成后,以下數據會被測試優化:第一,編碼器測試,配備轉速編碼器時會檢查編碼器旋轉方向和線數;第二,測量飽和特性曲線(p0362~p0369),測量勵磁電流(p0320)和確定變頻器相對于偏移補償的偏移電壓,測量異步電機上漏電感的飽和特性,設置電流控制器適配(p0391~p0393);第三,轉速控制器優化p1470和p1472(p1960=1,無編碼器運行)、p1460和p1462(p1960=2,帶編碼器運行),實現速度環參數優化;第四,加速度前饋控制設置(p1496)實現更好的加速度預先控制;第五,對于總轉動慣量與電機轉動慣量之比的設置(p0342),實現轉動慣量相關參數的優化。
如果在電機動態優化的測量期間發現輸入的驅動動態系數無法使驅動穩定運行或者使轉矩波動幅度太大,動態響應將自動降低,結果顯示在R1968中,應檢查驅動動態系數在整個設定范圍內是否運行平穩,必要時應降低動態系數,或者設定合適的轉速控制器Kp_n/Tn_n適配,如圖14所示。
需要特別指出的是,通過電機靜態和動態優化,系統完成自動檢測、辨識和優化,但受多種因素影響,可能需要經過多次電機匹配性優化測試才能達到符合控制精度和平穩的要求。如果經過多次優化還不能達到滿意的控制效果,對于配置西門子S120系列的變頻傳動裝置來講,比較合適的解決辦法是人為干預轉速控制參數,通過對速度環參數進行微調來測試優化效果。可通過調整p1967(速度環動態響應因子),當要求系統動態響應快時,該值需>100%,P1960優化結束后,加速度預控p1496設置為100%,若速度給定變化比較大或者齒輪傳動時,建議取消加速度預控[6-8]。
4" " 電機匹配性優化的故障實例
4.1" " 絞車在速度控制手柄零位時出現溜車現象
對于鉆井絞車手柄處于零位在未給定速度的情況下出現溜車情況,如圖15(a)所示,可通過電機優化處理。通過電機組合、監測參數發現,只要絞車B電機參與,就會出現速度未給定情況下的絞車異常運行,其余電機組合時絞車運行穩定。經過對相關因素進行排查,未發現異常,考慮B電機存在需要優化的問題,經過對B電機優化處理,絞車運行穩定,相關組合運行正常,如圖15(b)所示。
在海洋平臺鉆井過程中,鉆井絞車作為處理鉆具的關鍵設備,其平穩運行至關重要,當電機匹配性優化出現問題時,就會在實際運行中反映出來。引起絞車速度手柄未規定時絞車卻加減速的異常情況的原因很多,編碼器故障、干擾或電機優化問題都會導致該情況發生,需要通過監測系統參數的異常來進行進一步排查處理;若是硬件配置改變或是新調試的電機,則需要優先考慮電機優化,嘗試通過電機優化來解決該問題。
4.2" " 頂驅電機編碼器更換不同型號后出現電機運行不穩定現象
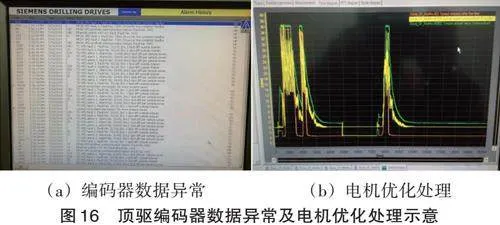
海洋鉆井平臺頂驅編碼器損壞,在更換新編碼器后控制系統頻繁出現報警編碼器差速故障,導致變頻器跳閘,無法正常進行作業生產,如圖16(a)所示。經過排查發現,頂驅原編碼器和新更換的編碼器為不同品牌型號,經過測試,發現新編碼器功能正常,接線一致,排除了新編碼器故障問題,安裝測試時出現編碼器差速報警,分析原因為更換編碼器導致其與電機原優化參數不匹配,重新進行電機優化后該頂驅電機運行平穩,再無報警情況發生,如圖16(b)所示。
在現場故障處理中經常會出現備件升級或采用其他品牌型號替換舊備件的情況,在維修過程中要充分考慮配件更換對設備運行產生的影響,對于配件更換后的異常情況要分析其影響因素。在電機匹配性優化時,功率單元、電機、編碼器等更換不同規格型號可能會與原電機優化建立的等效模型不匹配,必要情況下需要考慮重新進行電機匹配性優化,以便達到需要的控制精度和平順度,這種情況在實際設備維修維護中應引起注意[9-10]。
5" " 結束語
本文是對目前中油海主力鉆井平臺上采用的西門子S120系列變頻傳動裝置控制電機,進行匹配性優化研究工作的總結。通過對現場故障進行分析,發現對配置變頻傳動系統的電機進行優化是在實際故障處理中經常遇到的問題。這要求現場裝備維護人員需精準掌握這項專業技術,并在實際工作中熟練應用。本文參考相關資料,結合海洋平臺頂驅絞車、泥漿泵電機配置的相關情況,針對配置了變頻傳動系統的電機,給出了一些維護、維修方面的建議,以期給現場工作人員提供一些有益參考。
參考文獻
[1]" 華閏祺,徐海峰.SINAMICS G120變頻器的2線、3線控制[J].電氣自動化,2013,35(5):38-40.
[2]" 劉細平,胡衛平,丁衛中,等.永磁同步電機多參數辨識方法研究[J]. 電工技術學報,2020,35(6):1 198-1 207.
[3]" 徐強.西門子SINAMICS S120在冷軋酸洗中的應用分析[J].連鑄,2019,44(2):73-77.
[4]" 邱碧濤.連續退火爐爐輥控制系統開發與應用[J].裝備制造技術,2016(8):119-122.
[5]" 李勇,李智,牛軍浩,等.基于矢量控制的異步電機參數離線辨識策略[J].微特電機,2016,44(1):64-67.
[6]" 任仲岳,樓永樂.異步電機堵轉試驗的微機測試方法[J]. 微特電機,1986(3):26-29.
[7]" 云維祮.用感應變頻機進行低頻堵轉試驗的探討[J]. 大電機技術,1980(1):20-24,65.
[8]" 時亨嶺.西門子S120變頻器的優點及調試[J]. 電子測試,2017(12):99-100.
[9]" 陳篤超,李曉龍,董云鵬,等.西門子S120變頻器的應用與排故[J]. 電子技術與軟件工程,2020(8):78-79.
[10]" 李浩,李鋒,鄧忠彬,等.西門子S120系列變頻器常見故障分析及其解決措施[J]. 自動化技術與應用,2016,35(8):124-126.
作者簡介:
齊賦寧(1982—),男,河北石家莊人,工程師,2007年畢業于大慶石油學院電氣工程及其自動化專業,目前從事海洋石油電氣管理與技術工作。Email:qifn.cpoe@cnpc.com.cn
編輯:林" " 鮮