人工智能賦能汽車制造業探析
2024-11-04 00:00:00王宏寬陳少偉崔偉陸宏杰蔡燕君
自動化與信息工程 2024年5期
摘要:目前,汽車制造產線基本實現了自動化,產線中的工業機器人等設備按照預設程序進行自動化作業。針對汽車制造產線的產品需求或車間環境變化時,工業機器人等設備的預設程序需要重新設計,導致產線靈活性不足、應變能力差等問題,探析基于人工智能技術驅動的汽車制造產線自主感知、學習、規劃和決策的發展方向,旨在提高產線面對新產品、新工藝、新設備的適應能力,增強產線設備面對多變環境中突發事件的應對能力。
關鍵詞:汽車制造業;人工智能;交互協同;事件推演;自主決策
中圖分類號:TP311.5 文獻標志碼:A 文章編號:1674-2605(2024)05-0002-04
DOI:10.3969/j.issn.1674-2605.2024.05.002 開放獲取
Exploration of Artificial Intelligence Empowering the Automotive Manufacturing Industry
WANG Hongkuan CHEN Shaowei CUI Wei LU Hongjie CAI Yanjun
(China Academy of Electrical Sciences Co., Ltd., Guangzhou 510300, China)
Abstract: Currently, automobile manufacturing production lines have basically achieved automation, and industrial robots and other equipment in the production line perform automated operations according to preset programs. In response to the product demand or workshop environment changes in the automotive manufacturing production line, the preset programs of industrial robots and other equipment need to be redesigned, and the flexibility and adaptability are poor. This article explores the development direction of autonomous perception, learning, planning, and decision-making in the automotive manufacturing production line driven by artificial intelligence technology, aiming to improve the adaptability of the production line to new products, processes, and equipment, and enhance the ability of the production line equipment to respond to emergencies in changing environments.
Keywords: automobile manufacturing industry; artificial intelligence; interactive collaboration; event deduction; autonomous decision-making
0 引言
汽車行業作為規模經濟的典型范例,具有資本密集性、設備密集性與勞動密集性等特征。隨著“工業4.0”的推進,自動化技術在汽車制造業得到了廣泛應用。目前,汽車制造產線已基本實現自動化,產線中的工業機器人[1]等設備按照預設程序進行自動化作業。然而,當產品需求或車間生產環境發生變動時,工業機器人等設備的預設程序需要重新設計。考慮到汽車實際生產過程中設備繁多、環境多變且存在各種突發情況,
有必要開發一條自主感知、學習、規劃和決策的全智能汽車制造產線,以減少人力成本,提高生產效率。
近年來,隨著算法創新、算力提升和數據增長,人工智能技術在語義理解、知識表示、邏輯推理等方面實現了跨越式突破。深度融合人工智能技術,不斷提升汽車制造效率[2],推動汽車產業向更加智能、高效的方向發展已成為行業共識[3]。
基于上述現狀,本文提出一種基于群體智能算法、跨媒體事件推演算法、大模型技術的汽車制造產線自主感知、學習、規劃和決策的未來方向探析,旨在提高產線面對新產品、新工藝、新設備的適應能力,增強產線設備面對多變環境中突發事件的應對能力。
1 多異構機器人交互協同
汽車生產任務需要多個機器人相互協同完成,汽車自動化制造產線包含大量的機器人,如焊接、涂膠、搬運、檢測等機器人。為了建立全智能汽車制造產線,需要解決這些機器人之間的異質性。本文通過分析多異構機器人的特性,構建多異構機器人交互協同模型,研究群體智能算法,基于不同復雜環境制定多異構機器人通用協同控制框架[4],關鍵技術路線如下:
1) 根據焊接、涂膠、搬運、檢測和自動導引車等機器人在感知、運動、通信等方面的異構特性,確定多異構機器人的層次結構,明晰層次與機器人之間的通信協議,制定適用的數據信息交互標準和策略,實現多異構機器人交互協同體系建模;
2) 根據多異構機器人之間的約束與依賴關系,整合機器人的多源數據信息,建立多約束、多目標的數學模型,構建多模態群體智能算法,得到其在目標分配、任務規劃、軌跡優化等模塊的最優解;
3) 針對汽車制造產線的復雜任務和多變環境,通過強化學習使機器人與環境交互,獲得最優控制策略;基于遷移學習加速新環境下的知識學習和策略遷移,實現多異構機器人在復雜多變環境下建立通用的協同控制框架。
2 跨媒體事件推演
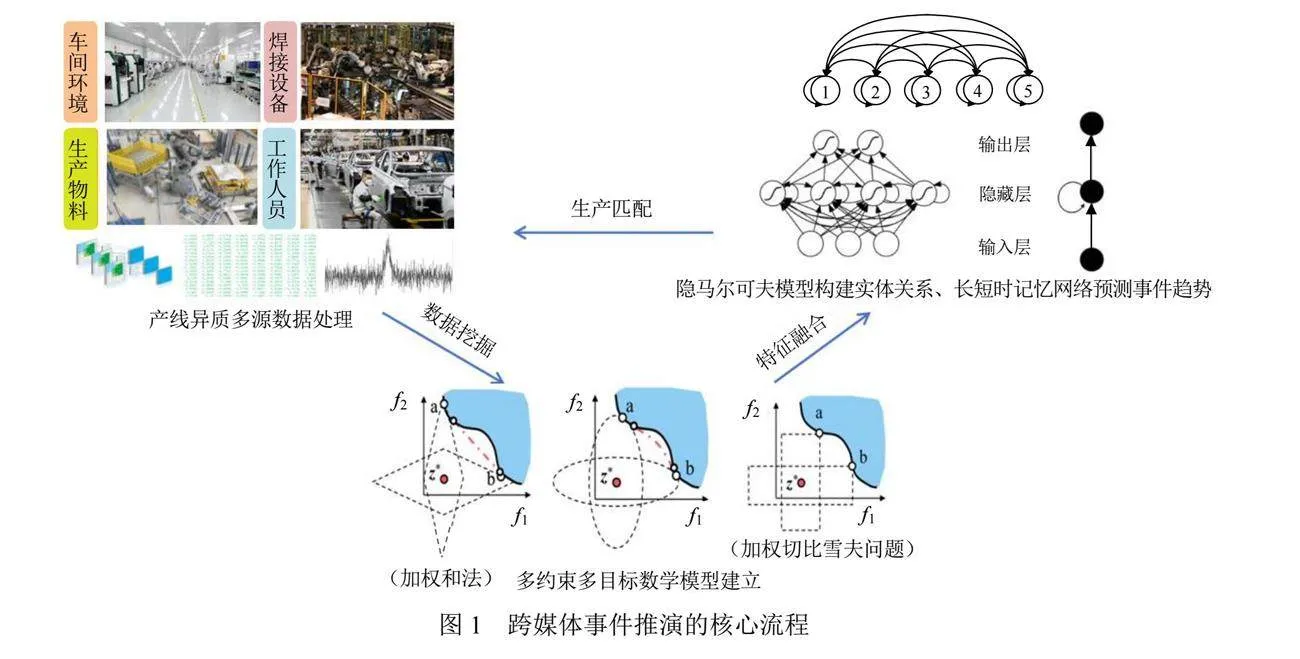
多異構機器人實現相互協同后,需結合產線上所有機器人的感知數據,匹配生產計劃,完成汽車生產任務的推演。跨媒體事件推演核心流程如圖1所示。
跨媒體事件推演實現方式如下:
1) 通過數據挖掘、模式識別、關聯規則挖掘、分類聚類等操作,提取多異構機器人中有價值的數據信息和潛在規律[5],構建多異構機器人的數字化模型,建立多異構機器人行為特性與事件要求之間的映射關系;
2) 使用對象檢測、行為識別、場景理解等算法,從文本、圖像和視頻中提取有意義的特征和事件,通過多模態融合算法對不同媒體特征進行有效融合,形成統一的跨媒體特征表示。通過分析不同事件之間的關聯性,構建事件演進的邏輯關系;采用隱馬爾可夫、長短時記憶網絡等模型預測事件的發展趨勢 [6],實現跨媒體事件的推演;
3) 采用循環神經網絡及其變體、生成對抗網絡捕捉序列數據之間的長期依賴關系,從汽車制造產線的歷史數據中學習,增強模型的泛化能力;同時,利用在線梯度下降算法,在每個新的數據點到達時更新模型參數[7],實現自適應學習,并通過強化學習算法與環境交互學習策略,利用歷史數據構建狀態轉移概率和獎勵函數的估計,實現推演算法的自適應學習與優化。
3 生成式大模型微調訓練
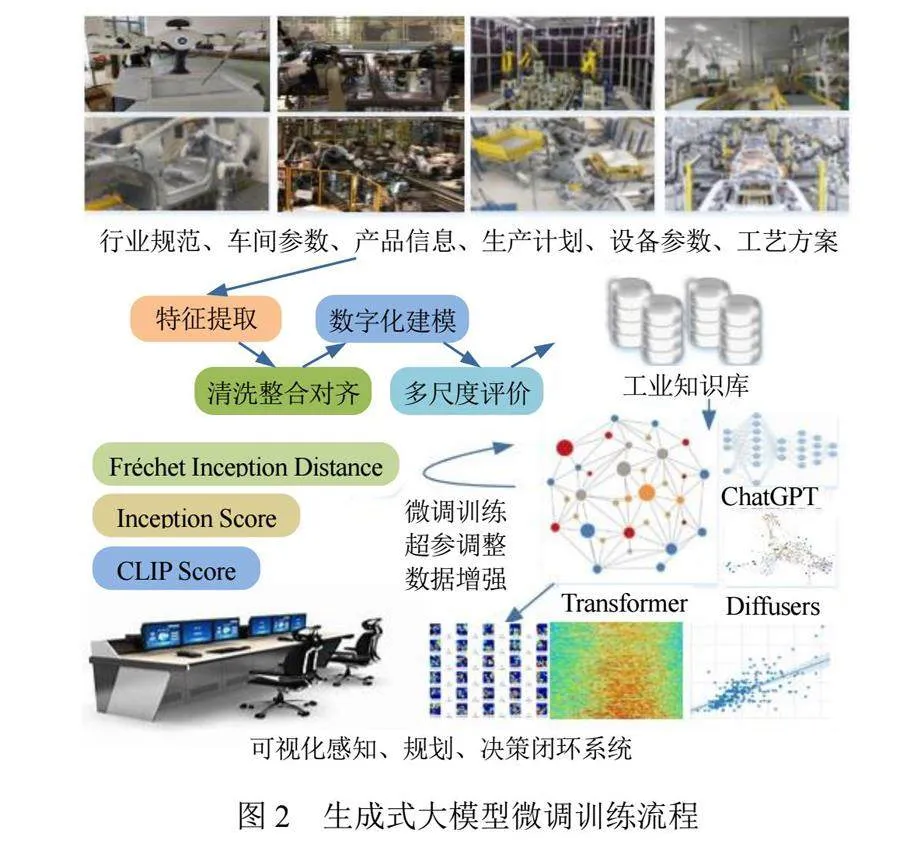
生成式大模型是構建全智能汽車制造產線及實現多異構機器人交互協同的核心[8]。生成式大模型微調訓練流程如圖2所示。
圖2 生成式大模型微調訓練流程
本文基于Transformer模型收集多源數據,建立工業知識庫,結合ChatGPT、Diffusers等大模型進行微調訓練,并利用CLIP Score、Inception Score、Fré-chet Inception Distance等作為模型評價指標[9-12],構建基于反饋機制的全智能汽車制造產線大模型,核心步驟如下:
1) 通過對汽車制造產線中大量的工業數據,如行業規范、車間參數、產品信息、生產計劃、設備參數、工藝方案等進行清洗、整合、對齊,分析多源數據與生產任務相關的特征,構建真實需求與設計方案之間映射關系的汽車制造產線工業知識庫;
2) 通過工業數據特征提取及實際生產任務深度理解的方法,設計生成式大模型架構,并利用生產數據進行針對性地微調訓練;在迭代訓練過程中,持續監督模型在獨立驗證集上的性能指標,采取超參數調整、數據增強技術、模型結構改造及集成學習算法融合等優化策略,構建在協同作業任務中具有優異性能和泛化能力的生成式大模型;
3) 通過分析模型的決策過程和內部邏輯,基于特征重要性分析和可視化技術,解釋生成式大模型在汽車制造產線中的行為和生成結果,增強模型的透明度和可靠性;同時,考慮到突發事件、環境變化、異常數據與噪聲等因素的影響,通過對抗性訓練等方法,提高模型在實際生產中的魯棒性,增強模型對復雜多變環境的適應能力。
4 方案構想
上述方案若在實際的汽車制造產線中實現,需要搭建算法平臺,以驗證算法和模型的有效性。然而在實際的汽車制造產線環境中,不僅要保證平臺的實時性、安全性、高效性,還要保證平臺在不同場景下的有效性[13]。因此,需要在產線數據收發、模型運行、可視化驗證等方面進行研究,其關鍵點在于:
1) 針對汽車制造產線中跨媒體數據實時傳輸帶寬資源占用大的問題,基于實時傳輸協議、壓縮編碼等技術,實現跨媒體數據傳輸的質量和穩定性;通過加密、身份驗證和訪問控制等方式,保證跨媒體數據的安全性;
2) 利用分布式計算技術,將汽車生產任務分解成多個小任務,并分配給多個計算節點進行并行處理,以提升模型訓練與推理的速度;采用分布式存儲技術,將數據分布在多個存儲節點上,以提高系統的存儲效率;構建一種分布式熔斷機制,當服務出現故障或異常時,自動切斷該服務的訪問,保證分布式計算與存儲的穩定性;
3) 針對生成式大模型與事件推演模型的可用性與解釋性,開發可視化工具,展示模型的輸入、輸出和決策過程,結構化存儲模型的輸入數據、參數和計算過程,并在實際的汽車制造產線中進行驗證與應用。
5 結束語
人工智能技術在汽車制造業領域的應用正深刻改變著行業面貌。為了提高汽車制造產線面對新產品、新工藝、新設備的適應能力,增強產線設備面對多變環境中突發事件的應對能力,本文提出了一種基于群體智能算法、跨媒體事件推演算法、大模型技術的汽車制造產線自主感知、學習、規劃和決策的方案構想,為最終形成一個基于動態復雜環境的生成式計算與事件推演平臺提供探索路徑。未來,隨著技術的不斷進步,人工智能將在汽車制造業中發揮更加重要的作用,引領行業邁向新的高峰。
?The author(s) 2024. This is an open access article under the CC BY-NC-ND 4.0 License (https://creativecommons.org/licenses/ by-nc-nd/4.0/)
參考文獻
[1] 代辛宇.人工智能在工業機器人系統中的應用[J].中阿科技論壇(中英文),2021(1):99-101.
[2] 王玲.人工智能技術在汽車制造業復雜機器人工位的應用[J].汽車制造業,2024(3):36-38;42.
[3] 白旭航.人工智能技術在工業機器人系統中的應用研究[J].信息系統工程,2018(12):91;93.
[4] 賈英霞,王東輝.基于自適應神經網絡的工業機器人雙臂協同魯棒控制[J].現代制造工程,2024(6):61-68.
[5] 王澤桐.智能控制策略在機械自動化系統中的應用研究[J].造紙裝備及材料,2023,52(9):50-52.
[6] 袁海亮,薛強,王海玲,等.基于工業機器人與機器視覺的紅外傳感器裝配系統設計[J].制造技術與機床,2023(6):33-38.
[7] 姚翔宇.多機器人系統分析及分布式協同控制研究[D].武漢:中國地質大學,2021.
[8] 王耀南,江一鳴,姜嬌,等.機器人感知與控制關鍵技術及其智能制造應用[J].自動化學報,2023,49(3):494-513.
[9] 張彥敏,陳明.制約中國智能制造發展問題探討[J].金屬加工 (冷加工), 2023(4):1-9.
[10] 林錦州,于英杰,郝樹新.人工智能在汽車制造智能化升級中的應用[J].新型工業化,2019,9(9):58-62.
[11] 丁惟云,張殿平,馬春輝,等.基于人工智能平臺的汽車制造技術發展分析[J].中國設備工程,2022(23):24-25;266.
[12] 姚芳,彭德奇.人工智能技術在汽車制造領域的應用研究[J].汽車測試報告,2023(7):34-36.
[13] 董傳龍,戈月紅.人工智能技術在汽車制造中的應用[J].汽車測試報告,2023(19):29-31.
作者簡介:
王宏寬,男,1989年生,本科,工程師,主要研究方向:公司汽車制造工藝。E-mail: wanghk@cei1958.com
陳少偉,男,1981年生,博士研究生,工程師,主要研究方向:整車集成設計與制造。E-mail: shaowei.chen@live.com
崔偉,男,1971年生,本科,正高級工程師,主要研究方向:汽車制造工藝。E-mail: cuiw@cei1958.com
陸宏杰,男,1982年生,本科,高級工程師,主要研究方向:汽車裝備研發。E-mail: luhj@cei1958.com
蔡燕君,女,1981年生,本科,高級工程師,主要研究方向:軟件開發。E-mail: caiyj@cei1958.com
