無人直升機(jī)斜坡起降操縱技巧研究
2024-10-29 00:00:00范帆李瑜強(qiáng)劉明琦
無人機(jī) 2024年7期
無人直升機(jī)是一種不需要人員搭乘,通過自主控制和導(dǎo)航系統(tǒng)實(shí)現(xiàn)飛行任務(wù)的直升機(jī)。近年來,無人直升機(jī)在各個(gè)領(lǐng)域展示了巨大的應(yīng)用潛力,包括軍事偵察、災(zāi)害監(jiān)測、物資運(yùn)輸?shù)取S捎跓o人直升機(jī)具有靈活性高、成本低以及能夠進(jìn)入人類無法到達(dá)的危險(xiǎn)環(huán)境等優(yōu)勢,其應(yīng)用范圍不斷擴(kuò)大,并成為研究和工業(yè)界的熱點(diǎn)領(lǐng)域。
斜坡起降是指直升機(jī)在傾斜的地面或斜坡上進(jìn)行起降操作。相較于傳統(tǒng)平地起降,斜坡起降具有一定的挑戰(zhàn)性和特殊性。傳統(tǒng)的無人直升機(jī)起降主要依賴于平坦的場地,而在實(shí)際應(yīng)用中,往往需要在復(fù)雜地形條件下執(zhí)行任務(wù)。斜坡起降可以允許無人直升機(jī)在地形崎嶇、有限空間或隱蔽區(qū)域等條件下進(jìn)行安全起降,擴(kuò)展了無人直升機(jī)的應(yīng)用范圍。如在救災(zāi)救援、環(huán)境監(jiān)測等任務(wù)中,無人直升機(jī)斜坡起降可以提供更多的靈活性和操作空間,以支持關(guān)鍵的任務(wù)執(zhí)行。
國內(nèi)針對直升機(jī)斜坡起降的研究大多僅局限于有人機(jī),在無人機(jī)領(lǐng)域少有涉及,在飛行手冊中會(huì)給出坡度限制,機(jī)型不同,坡度限制要求也不同,但飛行手冊中對斜坡起降的操作要領(lǐng)和注意事項(xiàng)并沒有給出詳細(xì)的內(nèi)容可供參考。試驗(yàn)中使用滑撬式起落架常規(guī)構(gòu)型的無人直升機(jī)進(jìn)行斜坡起降飛行,對飛行操縱技巧進(jìn)行總結(jié),供無人直升機(jī)操作人員參考。
斜坡起降的前提條件
(1)無人直升機(jī)的重心在正常重心范圍內(nèi);
(2)懸停時(shí)的風(fēng)速在飛行手冊規(guī)定的風(fēng)速范圍內(nèi);
(3)著陸的坡度角在飛行手冊所規(guī)定的范圍內(nèi);
(4)機(jī)上各個(gè)系統(tǒng)工作正常;
(5)保證油量充足;
(6)機(jī)上配重等固定牢固。
無人直升機(jī)斜坡起降試驗(yàn)研究
典型場景設(shè)計(jì)
試驗(yàn)平臺:某型滑撬式起落架常規(guī)構(gòu)型無人直升機(jī)
試驗(yàn)場地搭建:根據(jù)飛行手冊要求,斜坡坡度角不大于6.8°。使用硬質(zhì)泥土鋪建長10m、寬15m的坡面,斜坡與水平面夾角約6.5°。
起降方式:根據(jù)無人直升機(jī)機(jī)頭朝向與斜坡坡降線間關(guān)系的不同將斜坡起降分為逆(仰)坡起降、順坡起降和橫坡起降,試驗(yàn)采用逆(仰)坡起降,操作人員和地面控制站位于無人直升機(jī)正后方。
逆(仰)坡起降:無人直升機(jī)機(jī)體縱軸線平行于斜坡坡降線,機(jī)頭指向斜坡上方方向進(jìn)行起降;
順坡起降:無人直升機(jī)機(jī)體縱軸線平行于斜坡坡降線,機(jī)頭指向斜坡下方方向進(jìn)行起降;
左橫坡起降:無人直升機(jī)機(jī)體縱軸線垂直于斜坡坡降線,斜坡上方在機(jī)頭的左側(cè)進(jìn)行起降;
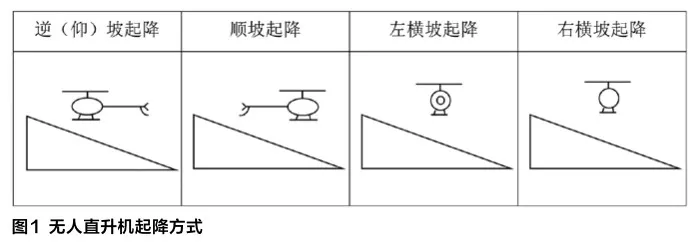
的右側(cè)進(jìn)行起降;
試驗(yàn)?zāi)康模簾o人直升機(jī)斜坡起降的相關(guān)信息稀缺,在試驗(yàn)時(shí)沒有現(xiàn)成的經(jīng)驗(yàn)去參考,試驗(yàn)過程出于安全考慮,只進(jìn)行逆(仰)坡起降。通過經(jīng)驗(yàn)總結(jié)以此類推即可得出其他起降方式以及其他構(gòu)型無人直升機(jī)的通用起降操作方法。
試驗(yàn)流程
無人直升機(jī)難以直接推至斜坡上,因此選擇平地起飛,設(shè)計(jì)試飛流程如下:
斜坡降落:
S1:無人直升機(jī)從平地起飛,到達(dá)斜坡上方進(jìn)行懸停;
S2:無人直升機(jī)操作員調(diào)整無人直升機(jī)位置,選擇坡面上相對平整的地方降低高度;
S3:緩慢降距,直至無人直升機(jī)完全停靠在斜坡;
斜坡起飛:
S4:緩慢提距,使得無人直升機(jī)完全離開坡面;
S5:根據(jù)無人直升機(jī)移動(dòng)趨勢進(jìn)行打桿操作,使無人直升機(jī)在坡面上方懸停;
S6:操縱無人直升機(jī)返回平地上方并降落。
數(shù)據(jù)采集
(1)飛行時(shí)對現(xiàn)場飛行情況進(jìn)行多角度視頻錄像;
(2)無人直升機(jī)地面指揮方艙對無人機(jī)回傳的數(shù)據(jù)進(jìn)行記錄;
(3)飛行控制系統(tǒng)對原始飛行數(shù)據(jù)進(jìn)行記錄。
試驗(yàn)分析
試驗(yàn)過程分析
試驗(yàn)計(jì)劃一個(gè)架次完成,但由于經(jīng)驗(yàn)不足在S3步驟中,無人直升機(jī)落在斜坡上之后出現(xiàn)了溜坡現(xiàn)象,隨即進(jìn)行了正常的停車流程打算阻止溜坡,結(jié)果導(dǎo)致無人直升機(jī)后仰并尾撐觸地,于是重新進(jìn)行試驗(yàn)。下面對兩次試驗(yàn)過程中的現(xiàn)象分別進(jìn)行描述:
(1)斜坡上停車的斜坡起降
斜坡降落:在斜坡上尋找合適的著陸點(diǎn),無人直升機(jī)無明顯位移時(shí)降距著陸,觀察到前起落架接觸坡面時(shí)繼續(xù)降距著陸,當(dāng)后起落架也接觸到坡面,此時(shí)無人直升機(jī)開始沿著坡面下滑,立刻下達(dá)慢車指令,在無人直升機(jī)下滑了2m左右后發(fā)動(dòng)機(jī)進(jìn)入慢車,無人直升機(jī)后仰,尾撐觸地,此時(shí)下達(dá)暖車指令,暖車狀態(tài)無人直升機(jī)姿態(tài)回正。
斜坡起飛:檢查飛機(jī)后重新開車,到起飛準(zhǔn)備以后,飛行控制系統(tǒng)開始介入,提距起飛,起飛瞬間無人直升機(jī)略有抬頭,繼續(xù)提距后無人直升機(jī)離開坡面開始向后運(yùn)動(dòng),共運(yùn)動(dòng)4m左右,隨后在飛行控制系統(tǒng)作用下回到斜坡上的起飛點(diǎn)上方并保持懸停。
(2)斜坡上不停車的斜坡起降
斜坡降落:無人直升機(jī)到達(dá)斜坡上方后尋找合適的降落點(diǎn),待無人直升機(jī)懸停穩(wěn)定后降低高度準(zhǔn)備著陸,在前起落架頂?shù)叫逼潞鬅o人直升機(jī)位置保持不穩(wěn)定,調(diào)整位置,待無人直升機(jī)穩(wěn)定后降距著陸,在坡面無滑動(dòng)。隨后總距降至最低并在斜坡上停留。
斜坡起飛:起飛時(shí)起落架后端先離地,離地后保持低頭的姿態(tài)向前飛行,向前運(yùn)動(dòng)大約15s,運(yùn)動(dòng)30m左右,隨后返回起飛場上方著陸。
試驗(yàn)數(shù)據(jù)分析
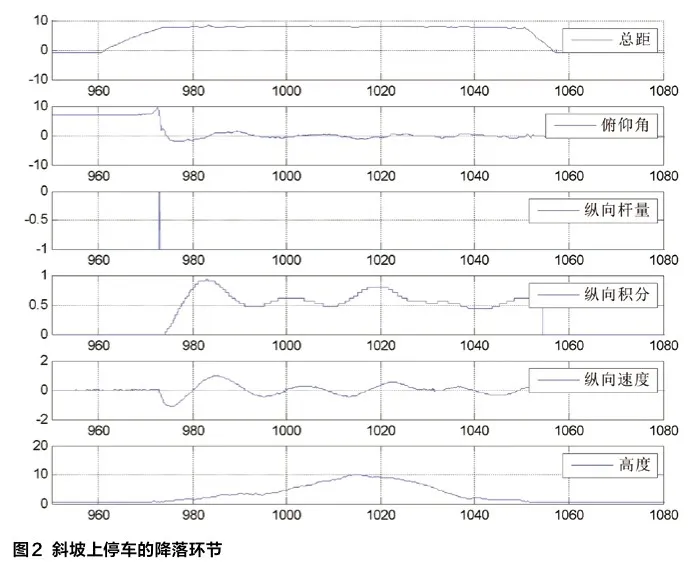
(1)斜坡上停車的斜坡起降
如圖2所示,由于降落過程中向前的縱向邊距給的量不足,導(dǎo)致落地后出現(xiàn)滑坡現(xiàn)象,此時(shí)發(fā)送了慢車指令,由于慢車時(shí)飛行控制系統(tǒng)開環(huán),原本向前的變距回零,這個(gè)過程產(chǎn)生的力使無人直升機(jī)后仰并造成尾撐觸地的現(xiàn)象,待進(jìn)入慢車后發(fā)動(dòng)機(jī)轉(zhuǎn)速變慢,旋翼轉(zhuǎn)速變慢,無人直升機(jī)在自身重力的作用下姿態(tài)回正。重新進(jìn)行開車,如圖3所示,待無人直升機(jī)進(jìn)入額定狀態(tài)時(shí),飛行控制系統(tǒng)閉環(huán),產(chǎn)生了向前的變距,但是斜坡坡度較大,產(chǎn)生的量不足,且飛行操作員此時(shí)沒有向前打縱向桿,因此無人直升機(jī)起飛瞬間有抬頭且向后運(yùn)動(dòng),運(yùn)動(dòng)一段距離后在飛行控制系統(tǒng)作用下回到了起飛點(diǎn)上空。
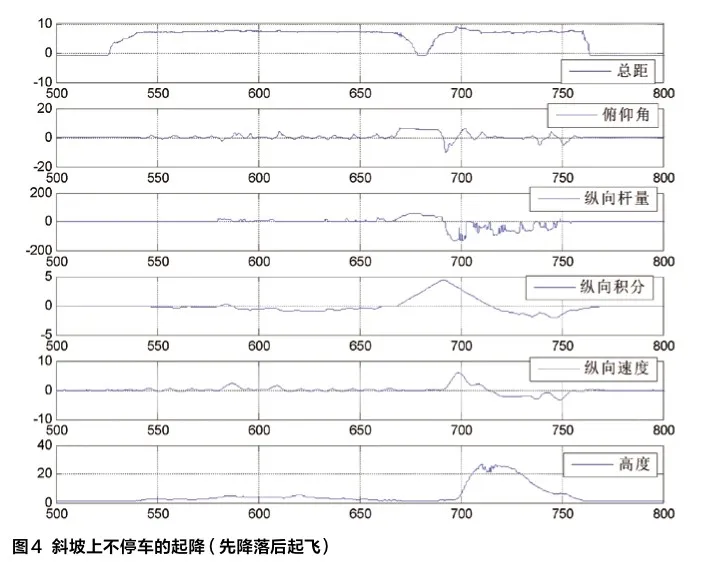
(2)斜坡上不停車的斜坡起降

如圖4所示,在對前面試驗(yàn)總結(jié)后對起降中的操作方法進(jìn)行了優(yōu)化,在降落過程中縱向向前持續(xù)壓桿,降落到斜坡后沒有出現(xiàn)滑坡現(xiàn)象,斜坡降落效果得到了極大的改善。由于擔(dān)心出現(xiàn)滑坡現(xiàn)象,在降落后仍然壓著縱向桿直到起飛時(shí)才回正,但是因?yàn)轱w行控制系統(tǒng)在不進(jìn)入慢車時(shí)一直處于參控狀態(tài),且無人直升機(jī)在斜坡上沒有移動(dòng),壓桿產(chǎn)生的縱向速度積分一直在疊加,起飛時(shí)向前的速度大,抵消原來的縱向積分花費(fèi)了較長時(shí)間,為了避開前進(jìn)方向障礙物選擇了增大總距提升高度來保證安全。
總結(jié)
根據(jù)飛行數(shù)據(jù)分析可總結(jié)推廣出滑撬式起落架無人直升機(jī)各機(jī)頭朝向的斜坡起降技巧。首先根據(jù)風(fēng)速風(fēng)向選擇合適的斜坡起降朝向,確定操作人員站位,一般位于后方便于觀察無人直升機(jī)姿態(tài)。操作技巧也同樣適用于輪式起落架無人直升機(jī),具有一定普適性。
滑撬式起落架無人直升機(jī)斜坡起降
(1)逆(仰)坡起降
降落:無人直升機(jī)飛至斜坡上方懸停,調(diào)整至要降落的位置,緩慢降距,在離斜坡很近的位置稍作停留,繼續(xù)緩慢降距,觀察起落架前端接觸到坡面時(shí)縱向桿前壓繼續(xù)降距,待起落架完全接觸到坡面觀察無人直升機(jī)是否有滑坡趨勢,有則繼續(xù)縱向壓桿,沒有則縱向桿回中,總距降至最低,無人直升機(jī)保持額定狀態(tài),降落成功。
起飛:直接提距起飛,起飛過程中觀察飛機(jī)運(yùn)動(dòng)趨勢進(jìn)行相應(yīng)調(diào)整。
(2)順坡起降
與逆(仰)坡起降類似。
(3)左橫坡起降
降落:無人直升機(jī)飛至斜坡上方懸停,調(diào)整至要降落的位置,緩慢降距,在離斜坡很近的位置稍作停留,繼續(xù)緩慢降距,觀察左起落架接觸到坡面時(shí)橫向桿左壓繼續(xù)降距,待起落架完全接觸到坡面觀察無人直升機(jī)是否有滑坡趨勢,有則繼續(xù)橫向壓桿,沒有則橫向桿回中,總距降至最低,無人直升機(jī)保持額定狀態(tài),降落成功。
起飛:直接提距起飛,起飛過程中觀察飛機(jī)運(yùn)動(dòng)趨勢進(jìn)行相應(yīng)調(diào)整。
(4)右橫坡起降
與左橫坡類似。
輪式起落架無人直升機(jī)斜坡起降
輪式起落架無人直升機(jī)分為前三點(diǎn)式無人直升機(jī)和后三點(diǎn)式無人直升機(jī)。
前三點(diǎn)式起落架的兩個(gè)支點(diǎn)(主輪)對稱的安裝在無人直升機(jī)重心后面,第三個(gè)支點(diǎn)(前輪)位于機(jī)身前部。
后三點(diǎn)式起落架的兩個(gè)支點(diǎn)(主輪)對稱的安裝在無人直升機(jī)重心前面,第三個(gè)支點(diǎn)(尾輪)位于機(jī)身尾部。
飛行操作方法與滑撬式起落架無人直升機(jī)類似,需要注意:
(1)著陸后若停留時(shí)間較長需使用輪擋剎車;
(2)確定無人直升機(jī)的重量重心以判斷機(jī)輪的著陸離陸順序;
(3)建議只使用左右橫坡起降,順逆坡起降有滑坡風(fēng)險(xiǎn)。
斜坡起降注意事項(xiàng)
(1)飛行前進(jìn)行場地勘察。起降場地應(yīng)具有一定強(qiáng)度,摩擦力足夠,若降落過程中出現(xiàn)滑坡現(xiàn)象應(yīng)立即中止降落并提距爬升高度。斜坡的前后方保持通視且無障礙物,若飛行前進(jìn)方向有障礙物應(yīng)迅速提升總距,通過提升高度避開危險(xiǎn)。確保斜坡起降場地?zé)o雜物且不會(huì)因?yàn)樾頁P(yáng)起風(fēng)沙,若無人直升機(jī)靠近過程中風(fēng)沙過大應(yīng)中止降落。
(2)斜坡上降落成功后不允許發(fā)動(dòng)機(jī)停車。停車會(huì)導(dǎo)致無人直升機(jī)發(fā)生側(cè)翻或尾撐著地等情況(坡度較小者例外),且長時(shí)間駐留會(huì)使燃油箱串油引起無人直升機(jī)重心變化,油量較少時(shí)甚至?xí)?dǎo)致供油不足。
(3)可根據(jù)無人直升機(jī)地面指揮方艙回報(bào)的周期變距度數(shù)和斜坡度數(shù)的差值來判斷是否需要在起飛時(shí)打桿。
未來展望
本文試驗(yàn)搭建的斜坡為固定角度,未來可根據(jù)無人直升機(jī)起落架摩擦系數(shù),進(jìn)行不同坡度下的斜坡起降,研究不同坡度對無人直升機(jī)斜坡起降的影響。還可以探究在斜坡上發(fā)動(dòng)機(jī)停車的條件以及斜坡起降的極限度數(shù)。
無人直升機(jī)近年來在艦船上同樣大放光彩,但是甲板會(huì)有起伏變化,降落時(shí)甲板和無人直升機(jī)存在一定夾角,情況類似于斜坡起降,相當(dāng)于由靜態(tài)斜坡轉(zhuǎn)變?yōu)閯?dòng)態(tài),其起降的操作方法與技巧是類似的。將陸地起降擴(kuò)展到艦船起降,極大地豐富了使用場景。
試驗(yàn)得到的數(shù)據(jù)同樣有助于無人直升機(jī)在斜坡自動(dòng)起降方面進(jìn)一步的研究,使得無人直升機(jī)緊急迫降更加安全,更加智能。在未來一個(gè)能應(yīng)對各種復(fù)雜環(huán)境的無人機(jī)也起到降低操作門檻、縮短使用者的培訓(xùn)周期的作用,減少用戶的使用顧慮。