無人機集群智能反制技術的研究現(xiàn)狀及展望
2024-10-24 00:00:00陳麗蓉羅俊松寧進胡艷梅多濱
無線電工程 2024年9期




關鍵詞:無人機集群;無人機集群脆弱性;智能反制技術;電子對抗;信息對抗
0引言
無人機(Unmanned Aerial Vehicle,UAV)集群隨著SG、AI、物聯(lián)網等前沿技術的演進加速發(fā)展,滿足了測繪航拍、物流運輸、災害救援和軍事作戰(zhàn)等各個領域的需求。然而,UAV集群的反制體系和監(jiān)管體系尚不完善,導致其破壞生態(tài)平衡、構成機場威脅等問題越發(fā)突出,為了抵抗UAV集群帶來的威脅,反UAV集群技術開始從概念走向雛形。近年來,Lyu等總結了各種反UAV技術和武器,并對每種技術的特點進行了分類。張冬冬等分析了針對UAV蜂群的防御技術和策略。張海龍等從探測識別、軟硬毀傷等方面對國外反集群裝備技術發(fā)展趨勢進行了分析。李姝等比較了幾種典型的反UAV蜂群技術。
上述文獻雖然對反制技術的原理介紹得很詳細,但鮮少總結技術在防御UAV集群這種大規(guī)模群體上所做的算法上的改進,以至于反UAV集群技術還停留在概念階段,發(fā)展并不迅速,因此研究適用的反UAV集群技術相關的的智能算法,可以給未來反UAV集群技術該向哪些方面研究提供一些啟發(fā)。本文將依次介紹UAV集群的特性、危害性和脆弱性,再全面總結現(xiàn)有文獻提出的適用于反UAV集群技術及其相關的智能算法,并針對技術存在的問題提出了算法上的研究建議,以實現(xiàn)集群入侵后高效攔截的設想。
1UAV集群特性
1.1UAV集群
UAV集群是一群部分具有自主能力的UAV智能體,相互協(xié)作而組成的多智能體系統(tǒng)。系統(tǒng)大小數(shù)量和編隊形態(tài)根據(jù)需求部署,一般來說,用于軍事偵查或情報收集的UAV可能相對較小,而用于遠程打擊或運輸任務的UAV可能更大、更重。同時,一些先進的UAV具備較長的續(xù)航能力,能夠支持數(shù)百甚至數(shù)千平米的飛行距離和數(shù)十小時的續(xù)航。
此外,多智能體系統(tǒng)的控制方式主要包括集中式和分布式,在分布式控制方式下,集群中的UAV具有更強的智能自治性,機間通過UAV自組網進行數(shù)據(jù)通信,有較高的自組織和自適應能力,母機和子機的作戰(zhàn)角色和任務分配更加自主和靈活,可以通過信息交互和協(xié)同處理實現(xiàn)任務完成。同時,系統(tǒng)的自組織網絡具有稀疏性、異構性、多跳性、無中心和多路由的特點,使UAV集群能適應節(jié)點高速移動引起的網絡拓撲變化,容錯包容度高,可以高效地執(zhí)行超大規(guī)模的情報偵測、信息中繼等協(xié)同行動,為軍事提供保障。
因此,世界各國都在競相加強UAV集群在軍事領域的應用,比如早在2021年以色列就使用UAV集群摧毀了敘利亞的數(shù)個軍事設施;2022年,英國宣布將在十年內投資超過16億英鎊開發(fā)UAV集群作戰(zhàn)系統(tǒng)。2023年,英國國防部公布,澳英美三國的科學家將共同研發(fā)UAV集群技術。
1.2UAV集群危害性
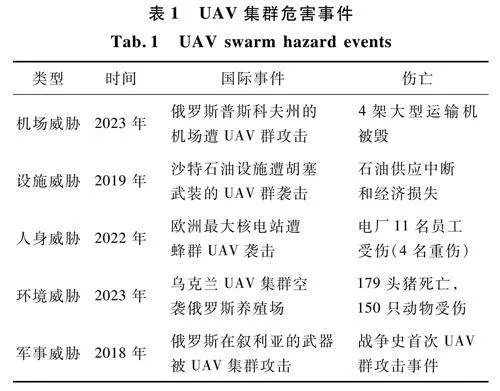
隨著UAV集群技術的發(fā)展,人們逐漸意識到UAV集群帶來了很多潛在的危險,如表1所示,UAV集群危害事件大體上為機場威脅、安全威脅和軍事威脅這3類。其中,機場威脅會干擾飛機的起降,導致航班延誤或取消,如果攜帶攻擊性武器或爆炸物,那么會對機場設施和人員造成嚴重傷害。同時安全威脅涉及設施安全、人身安全和環(huán)境安全,目前軍事威脅類問題最為嚴峻,UAV集群可攜導彈載荷進行打擊,是艦艇直接的威脅,UAV集群的出現(xiàn)不僅加劇了地區(qū)緊張局勢,也加重了軍民傷亡。因此,如何反制UAV集群成為國內外熱點。
1.3UAV集群脆弱性
UAV集群數(shù)量龐大,破壞力大,且在空間上三維分布,協(xié)同程度高。在協(xié)作過程中,UAV集群通過衛(wèi)星通信等定位技術相互連接,形成一個緊密的協(xié)同網絡,集群成員之間通過共享其位置、速度和任務狀態(tài)等信息,使得每個UAV都能夠了解整個集群的狀態(tài),并根據(jù)需要進行調整和優(yōu)化。同時,UAV集群會根據(jù)任務需求進行合理的任務分配,提高整體的任務效率。其次,UAV集群有特定的編隊形態(tài),通過編隊飛行,通過共享周圍環(huán)境的信息,UAV能夠及時發(fā)現(xiàn)并避免與其他UAV或障礙物的碰撞,確保整個集群的安全飛行。此外,如果集群采用了集中控制方式,通過一個中心節(jié)點來控制整個集群的行為,可以實現(xiàn)全局的協(xié)調和控制,對整個集群的行為進行精確的規(guī)劃和管理。因此,UAV集群高度協(xié)同增加了反制難度,尤其是其擁有自主導航控制算法,不完全依靠衛(wèi)星通信設施,能實現(xiàn)態(tài)勢感知交換、自主作業(yè)和自我修復,因此UAV集群很難被防范或攔截。
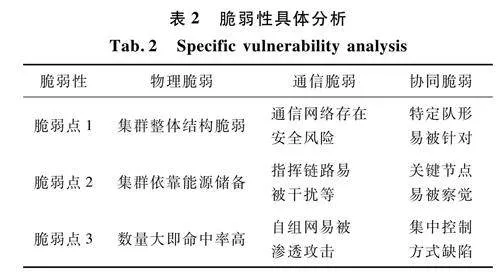
由于UAV集群在協(xié)同作戰(zhàn)時,過于依賴集群效應,簡單來說,需要大量UAV協(xié)同分工和通信來提高作戰(zhàn)效果,如果破壞了協(xié)同機制,集群將完全失去協(xié)同配合的能力,因此,可以分析UAV集群脆弱性來開發(fā)適當?shù)姆粗萍夹g,破壞其協(xié)同行動。脆弱性具體可以體現(xiàn)在:物理脆弱、通信脆弱和協(xié)同脆弱。表2對各個方面進行了分析。
從上表來看,物理脆弱性主要是由于UAV集群采用了輕金屬等輕型材料,使集群整體結構較脆弱,高能量的爆炸攻擊會對機體造成重創(chuàng),對能源供應產生中斷,導致UAV集群無法正常運作,而且集群中UAV數(shù)量密度大,武器擊中其面積越大,擊中率就越高,進而能破壞系統(tǒng)的正常運行。因此,物理脆弱性對UAV集群的傷害是致命的。
同時,UAV集群的通信脆弱性也可能會帶來嚴重的危害。首先,UAV集群需要通過通信網絡實時交換資源以保持協(xié)同合作,而通信網絡存在漏洞、授權機制缺陷或弱密碼等安全風險,容易受到干擾、延遲、篡改指令和偽裝攻擊等危險;其次,如果UAV集群的整體與地面指揮中心的通信鏈路出現(xiàn)問題,可能導致整個集群失去控制,從而影響任務的完成;最后,如果UAV集群內部的自組網出現(xiàn)問題,可能會導致網絡內的UAV無法相互通信或被誤解,無法協(xié)同完成任務,進而影響整體的表現(xiàn),甚至可能導致整個集群癱瘓。
當然,協(xié)同脆弱性對集群的傷害也不容小覷,首先是因為集群中UAV按照任務分工,在空中形成了特定的編隊形態(tài),如果根據(jù)編隊形態(tài)制定反制策略,敵方UAV集群的通信性能和任務執(zhí)行度會大受影響;其次,編隊飛行雖然減少UAV間碰撞的風險,但是如果采取交叉干擾或攻擊關鍵節(jié)點等方式,集群編隊會被強制解散,既定任務無法完成,使集群作戰(zhàn)能力大大降低;特別是針對采用集中控制方式的UAV集群,一旦指揮中心被摧毀,集群將會群龍無首,可能導致敵方任務失敗或中斷。
因此,針對UAV集群的脆弱性研究反制產品,對惡意入侵的UAV集群打擊力度可能會大大提升。
2反UAV集群技術國內外現(xiàn)狀
如今,集群威脅迫在眉睫,反制行動刻不容緩,國內外在政府的支持下大力研發(fā)反UAV集群技術,以共同應對黑飛風險。
2.1產品現(xiàn)狀
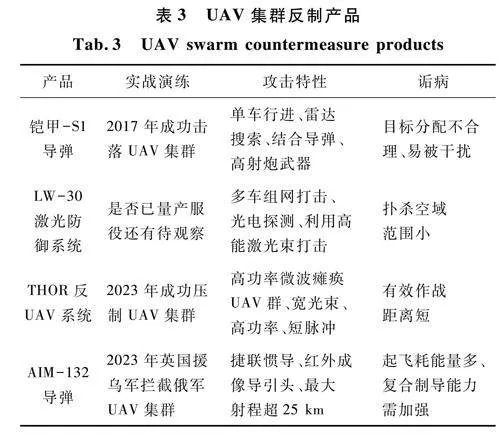
從資料來看,反UAV集群產品類型很多,主要分為電子干擾、導彈、激光、微波四大主流武器,顯然這些產品已經可以投身反UAV集群事業(yè),但是這些技術仍處于瓶頸階段,比如干擾打擊效果不如導彈等武器,導彈武器無法合理分配攻擊目標,且制導能力綜合性不強,會造成跟蹤目標丟失,激光武器撲殺面積較小,相較之下微波武器撲殺距離又較短。表3展示了部分反制產品的實戰(zhàn)效果,反制產品智能化程度不高,以至于在實戰(zhàn)演練中存在能量消耗大但目標未完全落網的情況。
2.2技術現(xiàn)狀
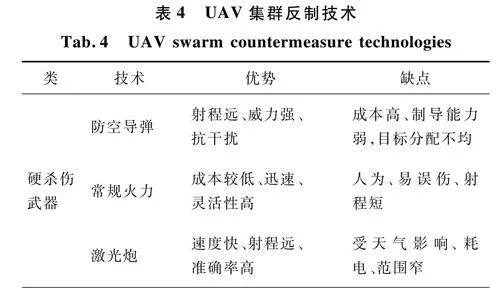
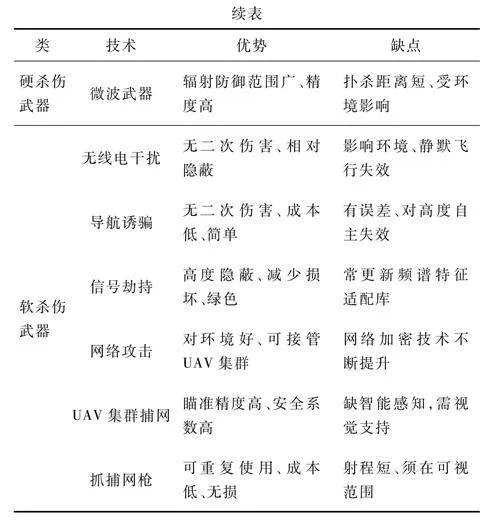
從近幾年的綜述論文分析來看,反UAV集群的手段依然以硬殺傷為主、軟殺傷為輔。硬殺傷武器是指使用物理動能類攻擊方式破壞敵機的武器,例如通過防空導彈、常規(guī)火力和激光炮等對UAV集群進行直接性摧毀。同時,軟殺傷武器可以分為通信阻斷和協(xié)同破壞兩主流支類,通過阻斷傳輸鏈路和破壞編隊機制,逼迫UAV集群懸停或降落。這兩大類技術的相關信息如表4所示。
①硬殺傷武器:在眾多UAV集群攻擊方式中,戰(zhàn)場上使用最多的是硬殺傷武器,硬殺傷武器采用防空導彈、激光炮等高價值技術,通過發(fā)射導彈、激光束等來擊穿目標UAV集群的整體結構。因此,這類武器擁有共同的優(yōu)勢,即射程遠、打擊速度快、殺傷力強。
②軟殺傷武器:目前在城市環(huán)境應用最廣,通過采用干擾、欺騙的方式阻斷UAV之間的鏈路聯(lián)系,以及利用網絡技術攻擊UAV自組網、UAV集群點對點捕捉敵機等方式破壞UAV之間的協(xié)同行為。相對來說,通信阻斷干擾類技術比較成熟,在天氣狀況理想時,干擾距離可達很遠,比物理摧毀類技術對環(huán)境更加友好。
同時,這2類技術存在一些共同的局限性。
①智能自主程度低。需要人為參與,難以適應現(xiàn)代化電子戰(zhàn)中的復雜環(huán)境和快速變化的戰(zhàn)爭態(tài)勢。比如協(xié)同破壞類技術中的UAV集群捕網還未展現(xiàn)群體智能高度的自主性,像抓捕網槍技術和UAV集群捕網技術等需要操作員控制UAV集群的飛行方向和手動分配UAV的跟蹤目標,缺乏智能感知,難以及時對抗敵方UAV集群。此外,隨著UAV集群在自主避障和隱身技術等方面的不斷提升,這對反制技術的智能化水平提出了更高要求。
②部分技術不適用。如導航誘騙技術不適用反分布式編隊集群或高度自主的UAV集群,因為分布式編隊的集群可自主導航、協(xié)同定位,而高度自主的UAV集群采用圖像識別、地圖匹配輔助定位,因此對其發(fā)送假的GPS定位信號并不能使UAV集群改變航行的方向。另外,在所有反制手段中,信號劫持技術屬于難度系數(shù)較大的反制手段,通過無線電監(jiān)聽UAV,偽造相同的通信信號,注入到鏈路中,達到接管UAV集群的目的。文獻[7-8]研究表明,這種技術需要破解通信協(xié)議,而通信協(xié)議種類繁多且在不斷更新?lián)Q代,因此,應當定期更新UAV頻譜特征適配庫,長此以往,信號劫持技術的更新和維護難度變得很大。
③反制裝備效費比低。首先,硬殺傷武器受天氣影響較大,導致精準度忽高忽低,容易造成誤傷,而且對付UAV集群這種低成本的目標,難免成本耗費過高,顯得大材小用;其次,軟殺傷武器截獲目標通信信息需要時間,可能會造成目標丟失;最后,UAV集群攻擊方式之間缺乏協(xié)同機制和融合能力,無法發(fā)揮多技術的綜合疊加效應。
因此,反UAV集群武器需要更高效的智能算法和更適用的技術支持,以對抗UAV集群威脅,于是如何利用人工智能,讓反UAV集群技術達到更高的效費比,成為了國內外競相研究的熱點課題。
3UAV集群智能反制技術
通過查閱大量文獻,總結了幾種可行的UAV集群智能反制技術,可以分為范圍反制和定點反制兩大類,范圍反制即采用具有殺傷范圍的武器對集群目標進行集體反制,定點反制則通過點對點對集群進行瞄準打擊。這些智能反制技術在傳統(tǒng)反制技術的基礎上對算法進行了改進,能夠有效對抗UAV集群這種“低小慢”飛行器。接下來,將進行算法分析來展示這些反UAV集群技術現(xiàn)有的優(yōu)勢和局限性。
3.1范圍反制技術
3.1.1智能防空網絡武器
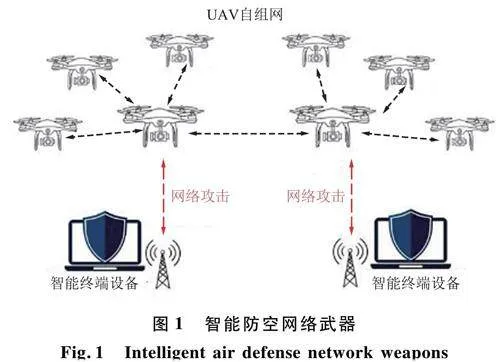
智能防空網絡武器,通過攻擊UAV集群自組網,達到驅趕或接管集群的目的,如圖1所示。根據(jù)通信脆弱性分析,網絡滲透可以對UAV的WiFi鏈路劫持,進而抵御入侵UAV。2018年,GeekPwn黑客大賽上一位研究員通過劫持通信鏈路實現(xiàn)了對UAV的接管控制,而UAV之間的通信鏈路是自組網的一部分,因此,通過攻擊自組網可以攔截UAV集群。同時,由于自組網采用的網絡協(xié)議是通信協(xié)議的一個子集,它專注于在計算機網絡中的數(shù)據(jù)傳輸、路由協(xié)議和管理,相對于通信協(xié)議來說,破解自組網的更新和維護適配庫成本更小,于是智能防空網絡武器具有更高的普適性。
然而,UAV自組網無中心節(jié)點,每個節(jié)點通過自組織網絡互相通信,若僅切斷一個節(jié)點,各節(jié)點會重新組網。而路由協(xié)議為自組網內部數(shù)據(jù)的傳輸提供路徑決策,是集群協(xié)調完成各項任務的基礎,攻擊路由無疑對整個集群影響最大。文獻[11]將現(xiàn)有的路由協(xié)議分為了幾大類,并羅列了不同的缺陷,因此可以采取不同的方式進行攻擊。
首先,針對地理位置輔助路由,雖然通過獲取節(jié)點位置信息,減少了路由發(fā)現(xiàn)的開銷,縮小了路由請求洪泛的范圍,但此類路由弊端是網絡中的節(jié)點必須明確自身的物理位置。因此,可以通過截獲自組網數(shù)據(jù)包,注入虛假地理位置信息,欺騙集群選擇錯誤的路由路徑,從而攪亂通信連接,導致集群無法正常傳輸數(shù)據(jù),失去集群作戰(zhàn)能力。
其次,平面路由的節(jié)點間存在多條路徑,雖然該路由的UAV集群網絡健壯性強,可修復性好,但是該路由很難有效管理大規(guī)模的UAV集群,若占用過多帶寬會使數(shù)據(jù)無法傳輸。對此,文獻[ 12]指出,向自組網的各節(jié)點泛洪大量的虛假路由信息或無用的數(shù)據(jù)包,可以導致網絡中的路由表過載,使網絡癱瘓,影響路由決策。
總之,防空網絡武器搭載在智能終端設備上,中斷網絡信息的傳遞,甚至接管UAV集群。如今,UAV集群作為信息化設備.對信息較為依賴,這種軟殺傷手段或將成為未來反制領域的“制高點”。
3.1.2智能無線電干擾
土耳其反UAV系統(tǒng)采用智能無線電干擾技術抵御UAV威脅,如圖2所示,此技術通過對目標集群中每個UAV實行干擾,從而實現(xiàn)對目標集群的干擾。文獻[13]證實了對采用跳頻擴頻通信的UAV集群進行壓制,跟蹤干擾的效果比多音、線性調頻和隨機跳頻干擾這3個方法好得多,因為跟蹤干擾的波束更窄,能量消耗更少,附帶殺傷也更低。但是跟蹤干擾時,UAV通信頻率跳變的時間極短,干擾機分析目標信號中各種參數(shù)、對準跳頻頻率調整干擾參數(shù)、實施干擾的時間就更短,因此,很多文獻都在嘗試提高時頻分析的效率和干擾頻率調制的自適應能力。
首先,UAV識別模型的建立是干擾方案的第一步,為了提高信號識別效率,很多研究都做出了努力,如文獻[11]采用了短時傅里葉變換(Short Time Fre-quency Transform,STFT)算法,以分析一段時間內非平穩(wěn)信號的頻率成分,然后在頻譜圖上應用CNN方法進行分類,能有效識別信號。但STFT算法需要確定窗函數(shù),由于集群中UAV眾多,時頻較為復雜,該算法缺少靈活性。文獻[14]則采用小波變換算法對調制信號進行分類識別,以對信號的時頻特性更快速的分析。同時,文獻[15]采用基于譜差分的導頻頻率估計方法,對快速傅立葉變換得到的頻譜進行譜差分計算,從而得到UAV精確通信頻率。
其次,為了提高干擾調制的自適應能力,許多文獻在信號的生成到功率放大階段做出了努力,文獻[16]使用帕克斯一麥克萊倫算法,對干擾信號的主瓣波束寬度進行調整,彌補了探測的UAV的位置偏差;文獻[17]在傳統(tǒng)的II型匹配網絡的基礎上增加了T型網絡,擴展了放大器的帶寬;文獻[18]采用了三維電磁干擾模型,通過協(xié)同打擊方式來共同對付來自各個方向的集群UAV。
總之,在干擾各個環(huán)節(jié)進行算法的改進,是提升智能無線電干擾自主化能力的必由之路。
3.1.3高能微波武器
高能微波(High Power Microwave,HPM)武器是一種集波束寬、角度大、容錯率高、動態(tài)可調節(jié)于一體的新概念武器,能夠發(fā)射超高頻微波波束,以前門耦合和后門耦合的方式共同影響UAV集群電子系統(tǒng)的脆弱部分,并伴隨電磁持續(xù)干擾,導致目標基帶誤碼率增加,從而癱瘓敵方UAV集群。
目前許多文獻都對微波武器的性能進行了精確的評估。這是因為HPM武器在攻擊UAV集群時,UAV數(shù)量、UAV飛行速度和攻擊角度都會影響毀傷效果,毀傷能量損耗大,打擊距離相對有限。圖3是美空軍微波武器THOR,文獻[1]根據(jù)THOR已完成的定向能系統(tǒng)的工作及靠集裝箱中的發(fā)電機供電的事實,證實THOR有效射程可能不超過幾百米。同時,為了更好地評估HPM武器的毀傷性能,文獻[20]提出了專家打分法和熵權法,并建立了毀傷評估模型,綜合提高了毀傷評估精度。
還有一些文獻對微波武器的算法提出了改進。比如文獻[21]利用傅里葉變換等方法,通過調整HPM武器信號的主瓣和離散頻譜帶寬的有效范圍,實現(xiàn)了更高效的毀傷UAV集群。目前,HPM武器已進入實戰(zhàn)化階段,在射程、功率和性能方面都有進步。2023年THOR高功率作戰(zhàn)系統(tǒng)在科特蘭空軍基地試驗場進行了測試,成功癱瘓了UAV集群。文獻[22]表示俄國防部的微波炮摧毀區(qū)域可達10km。
同時,鮮少有文獻提及應對電磁波屏蔽設備的措施,目標屏蔽這一外部因素會影響HPM武器的性能,敵方UAV集群若加裝電磁波屏蔽設備,武器的殺傷力會大大受限,因此HPM技術在克服外部因素方面還有待提升。
3.1.4智能導彈武器
導彈是具有一定殺傷范圍的武器,可以根據(jù)導引系統(tǒng)提供的引導信息調整航向和高度,具有較遠的射程和較強的穿透能力。導彈系統(tǒng)可以將多枚導彈進行快速編組[23],形成協(xié)同打擊編隊,對遠距離的UAV集群的多架UAV進行集體殲滅。
未來精確制導成為了現(xiàn)實需求,因而對導彈武器的改進部分包括制導系統(tǒng)。而無線電制導是一種廣泛應用于導彈防御系統(tǒng)的制導方式,這種制導容易受到電子干擾,因此不同國家都對導彈武器的制導系統(tǒng)進行了改進。如中國的紅旗-6A彈炮防空系統(tǒng)添加了半主動雷達制導模式,不僅避免了電子干擾還可提供更遠的射程和更高的精度;英國的AIM-132導彈防空系統(tǒng)使用紅外成像制導模式,額外增加了更清晰的瞄準點;Kh-47“匕首”高超音速導彈使用慣性導航系統(tǒng)如圖4所示,其加速度和位置可以提供連續(xù)制導,能夠持續(xù)抵御干擾。
另外,文獻[24]提及硫磺石導彈、超遠距離反艦導彈LRASM、聯(lián)合空地導彈JAGM等,這些復合制導武器都增加了導彈系統(tǒng)的抗干擾能力和多維度的識別能力。但目前復合制導技術還是以雙模為主.而多模的自適應能力更強,智能化程度更高,并且模塊化設計能根據(jù)目標遠近靈活更換導引。因此智能導彈武器應朝著多模復合制導的方向發(fā)展。
同時,針對復合制導精度較低的問題,多篇文獻在博弈策略上進行了研究。文獻[25]提出了一種角速度閾值的制導律和更節(jié)能的切換條件,提高了制導精度,并縮短了復合控制的工作時間。文獻[26]提出了一種新的構造點火邏輯系數(shù)的函數(shù)形式,能根據(jù)不同的直接側向力和飽和氣動力來改變直接測量力的點火閾值,以適應不同的作戰(zhàn)情況。另外,文獻[27]研究了多模復合制導時的信息融合算法,先將數(shù)據(jù)對齊,然后利用最小方差全局最優(yōu)融合算法完成雙模目標視距信號濾波值的數(shù)據(jù)融合,最終生成跟蹤回路的失準角指令,控制導引頭穩(wěn)定跟蹤目標。綜上,改進制導律和切換條件,并利用時空配準、模式識別和機器學習等,設計特征級、決策級的復合制導融合算法,能夠提高導引系統(tǒng)的精度。
此外,反UAV集群技術目前的研究還集中在動態(tài)武器目標分配(Dynamic Weapon TargetAssignment,DWTA)的問題上,智能導彈編組時必須考慮對多目標如何進行多導彈分配的問題。為此,文獻[28]提出并驗證了一種改進的粒子群優(yōu)化算法,粒子適應度值是各導彈對各UAV的期望剩余威脅,其適應度值最小粒子的位置視為粒子群算法優(yōu)化DWTA方案,從而實現(xiàn)對多導彈DWTA的有效性。文獻[29]提出了一種基于精英策略的多種群自適應遺傳算法,通過精英選擇算子選擇當前種群的最優(yōu)解并進行精英備份,有效抑制算法陷入局部最優(yōu),從而獲得更高精度的分配方案。隨后,文獻[30]提出基于雙序列編碼的多種群NSGA-Ⅱ算法,通過深度優(yōu)先搜索-Dijkstra算法、改進的染色體交叉與變異操作、多種群策略等,提升了算法性能。
總之,導彈武器需要在目標分配、復合制導和信息融合上不斷提升算法性能,提高智能化程度,以最少的彈量對抗鋪天蓋地來襲的UAV集群。
3.2定點反制技術
3.2.1智能集群對抗
智能集群對抗技術利用多智能體對抗集群,是一種大規(guī)模、高密度的殺傷行為。如圖5所示,該技術通過編隊協(xié)同組成多智能體戰(zhàn)斗小組,各智能體可以自主決策,通過協(xié)作達共識,共同跟蹤敵方UAV集群的多架UAV,并攜帶干擾[31]、導彈攔截和激光等武器及捕網等方式,對UAV集群進行干擾、打擊和攔截。為保證追蹤者之間相互協(xié)調和對所有逃避者的全面攔截,需要該技術從多維度提升。
(1)提高相對定位能力
多智能體需協(xié)同共享位置等信息,保持距離和速度相對平穩(wěn),避免相互干擾,同時對目標集群協(xié)同搜索和多角度跟蹤,保持與逃避者的距離,避免目標逃逸。文獻[32]提出了一種基于KHOPCA的自動平衡聚類算法,實現(xiàn)了攔截和捕獲編隊的平衡分簇,保證了編隊內智能體間距離相差小,避免目標逃逸。文獻[33]采用了一種有效追擊逃避者的算法,即智能體與目標距離小于閾值時,發(fā)起干擾,若小于第二閾值時,執(zhí)行相對位置算法,實現(xiàn)了對目標的有效反制和精確定位,但捕捉者本身定位誤差大。因此,文獻[34]在此基礎上,提出了在線多智能體干擾算法,多智能體之間可通過融合機會信號(Signal ofOpportunity,SOP)信息與視覺和慣性數(shù)據(jù),合作相對定位,彌補了追捕者自身定位的不足,實現(xiàn)了更高的定位精度。
(2)提高目標狀態(tài)估計能力
首先需要提高目標檢測和目標跟蹤的準確度,文獻[33]采用了基于YOLOv4模型的目標檢測算法,并采用了一種使用交集分數(shù)方法和匈牙利算法的跟蹤器算法,來實現(xiàn)檢測和跟蹤附近的入侵UAV。文獻[35]提出了Deep SORT目標跟蹤算法,通過深度學習提取特征,將前后2幀的目標特征匹配后,輸出目標軌跡,再使用卡爾曼濾波技術進行目標位置的預測和修正,并為每一個目標分配ID標識,解決在多目標跟蹤中目標重合和遮擋的問題。文獻[36]采用矩陣分解和匈牙利算法來加速預測框的匹配和關聯(lián),更新目標新的軌跡。另外,文獻[37]為了高效估計目標狀態(tài),使用了貝葉斯濾波器計算后驗密度,各智能體交換它們的估計,并通過協(xié)方差交集獲得目標最終狀態(tài)。文獻[38]結合了計算機視覺技術和Dijkstra動態(tài)路徑規(guī)劃算法,以便多智能體在定位目標后,能盡快找到最快的路線跟蹤目標。文獻[39]引入注意力機制,基于不同通道的重要程度去調整關注度,顯著改善了目標分類準確度;文獻[4]引人多尺度特征融合機制構建高分辨特征圖,使算法適應不同大小的UAV。
(3)提高自主控制決策能力
文獻[31]建立了基于MADDPG算法的UAV群智能模型,將算法與規(guī)則耦合,減少了無效探索動作,有效地提高多智能體的對抗能力。文獻[40]設計了用于追蹤控制優(yōu)化MACNET深度強化學習算法,集成了DeepSet架構、近似策略優(yōu)化(ProximalPolicy Optimization,PPO)算法和基于控制屏障函數(shù)(Control Barrier Function,CBF)的安全層,以在避免碰撞的同時協(xié)作捕獲逃亡者,還能處理時變維度的觀察值。同時,文獻[41]提出了多智能體追蹤多逃避者的分布式算法,每個智能體只需要通過Voronoi鄰居選擇最近的逃避者作為它的目標,就能避免與共享同目標的其他全部智能體協(xié)調,保證了有限時間內捕獲所有逃避者。文獻[42]也在集中式級聯(lián)決策算法高性能的基礎上,提出了分布式決策控制算法,降低了時間復雜度,并在實際部署中,使決策系統(tǒng)在集中式和分布式算法中切換,基于多智能體的數(shù)量、移動性和功率,組合對抗UAV集群。
綜上可知,智能集群對抗技術已具備一定的相對定位、目標狀態(tài)估計和自主決策能力,但在提高檢測跟蹤精確度和降低決策復雜度方面還需要不斷加強,以最大化反制效能。
3.2.2智能激光武器
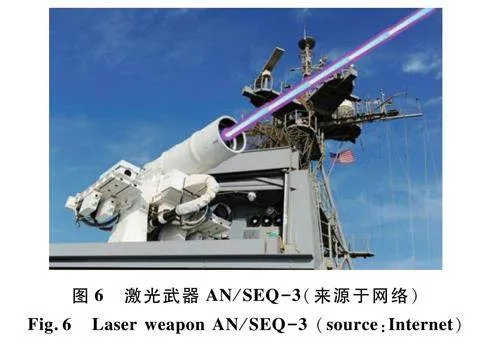
激光武器系統(tǒng)(Laser Weapon System,LaWS)屬于光束的攻擊形態(tài),作為一種定向能武器,通過致盲目標集群中每個UAV的通訊設備或摧毀其機身材料[43],進而摧毀整個集群,激光武器AN/SEQ -3如圖6所示,AN/SEQ-3系統(tǒng)是LaWS的典型應用,可在2s內擊落一架UAV。
LaWS采用激光雷達技術發(fā)射脈沖激光,來測量UAV集群的距離和編隊形態(tài)。在發(fā)射激光束后,點云分割算法會對返回的三維點云數(shù)據(jù)進行分割,如基于平面擬合的RANSAC算法可以將點云數(shù)據(jù)分為不同的部分,然后點云聚類算法會對目標點云數(shù)據(jù)進行聚類,如基于歐式距離的聚類算法通過計算點云數(shù)據(jù)的歐氏距離,將同一對象的點云數(shù)據(jù)進行聚類。
為了在短時間內獲得目標完整的點云數(shù)據(jù),以快速估計UAV集群的運動狀態(tài),點云配準是最關鍵一步。考慮到傳統(tǒng)配準算法速度慢,且UAV集群的點云距離較遠,數(shù)據(jù)量較大,文獻[44]提出了一種基于正態(tài)分布變換(Normal Distributions Transform,NDT)和最近點迭代(Iterative Closest Points,ICP)的快速點云配準法,使點云數(shù)據(jù)量較大或較遠的情況下,算法能夠達到較快的配準速度與較高的配準精度,能準確地判斷UAV集群特征點,快速獲得完整的點云數(shù)據(jù)。同時,點云數(shù)據(jù)包括深度圖像和強度圖像,目標檢測和跟蹤算法可以檢測深度圖像中的距離信息,實現(xiàn)對目標UAV集群中每一個UAV的定位和追蹤。文獻[45]證實了跟蹤精度和傳輸距離對目標點功率密度的響應靈敏度變化很大。
為了實現(xiàn)更大精度的監(jiān)測跟蹤系統(tǒng),避免目標因小而被漏檢,文獻[46]在YOLO網絡引入了空間金字塔池(Spatial Pyramid Pooling,SPP),實現(xiàn)3個尺度的特征提取,達到了較高的檢測精度和檢測的每秒幀數(shù)。同時,文獻[47]提出采用貝葉斯估計器或一些更復雜和精確的估計器,來預測目標下一時刻的位置。另外,文獻[48]使用了卡爾曼濾波法來消除狀態(tài)估計時的噪聲干擾,解決延遲測量的問題,保證激光束能精準擊中目標。
為了攔截超大規(guī)模的UAV集群,針對UAV集群中多目標,激光技術需要更多考慮算法的時效性和準確性。首先,可以采用陣列式排列或多波束技術同時向多個方向發(fā)送多次激光脈沖,通過對這些返回的點云數(shù)據(jù)進行處理,實現(xiàn)對UAV集群中多目標的同時檢測和跟蹤。其次,可以將通頻率調制、脈沖寬度調制和偏振調制等方式結合,形成高階的混合調制技術,提升LaWS的調制效率,以適應不同速度和距離范圍的目標。此外,文獻[50]利用等離子體通道來加速控制光束生成,進一步提高了LaWS的毀傷效果和作戰(zhàn)性能。
總之,目前智能激光武器可以為UAV集群提供一個合適的防御手段,能夠克服目標小而漏檢、不能快速控制光束、帶寬自適應性不強等問題,但是高質量的激光武器應盡可能地減少體積,并適當?shù)卦黾硬ㄊ鴮挾龋钥刂平徊婀馐芰哭D移和其他不穩(wěn)定性,要有效地克服信道中大氣湍流和背景光噪聲帶來的影響因素,從而提升LaWS的效費比。
4未來展望
目前,各種反制技術在現(xiàn)有研究中,已經能應對網絡拓撲變化、頻率跳變頻繁、目標分配不合理、制導能力弱和協(xié)同定位差等方面的挑戰(zhàn),但在實際應用方面還需要進一步考慮更多的情況,而且在面對UAV集群的區(qū)域自動化防御方面還需要迭代升級。因此,結合最新研究提出了反UAV集群技術未來可能的發(fā)展方向。
(1)提升防空網絡武器技術
鮮少有文獻考慮分級路由的情況,導致在不同的UAV自組網應用場景中存在局限性。分級路由下的UAV集群由多個簇構成,每個簇的簇頭作為控制中心,協(xié)調簇成員的協(xié)同行動,保證UAV集群能按既定策略行動。
對付分級路由的UAV集群,可先用無線電頻譜偵測特定信號的交互位置來找到簇頭,或對集群的航跡數(shù)據(jù)挖掘后,使用聚類算法或模式識別來識別集群中的特定行為,從而推測簇頭的位置。再對簇頭逐個網絡攻擊,破壞集群的協(xié)同行動。
如何對簇頭攻擊?可根據(jù)文獻[51]提及的一些類型的主動攻擊,如拒絕服務、路由表溢出、信息泄露等針對自組網有效。先對簇頭根訪問攻擊,以完全控制簇頭,再插入誘導指令或木馬程序,發(fā)送給簇內其他UAV,誘導集群集體返航,可使集群內部出現(xiàn)錯誤的路由信息,無法正常路由通信。
(2)提升高能微波武器技術
未來應尋找能自適應不同的UAV發(fā)生故障的功率和頻率,并適當增加二者的調整范圍,使HPM武器能夠在合適的頻段和功率水平上干擾,增強對不同電磁波屏蔽設備的適應性。同時,可使用跳頻技術、脈沖干擾等干擾模式,以繞過電磁波屏蔽設備的干擾對策,另外,可以對HPM武器的脈沖寬度、脈沖重復頻率等參數(shù)進行調制,實現(xiàn)更好的熱效應效果和能量穿透能力。
(3)提升智能導彈武器技術
在復雜的多目標協(xié)同下,多篇文獻考慮了如何進行動態(tài)目標分配,但鮮少同時考慮如何使導彈飛行軌跡全局最優(yōu),事實上可以利用一些最優(yōu)控制算法或強化學習算法,通過在線優(yōu)化飛行軌跡,來最大程度地對導彈的飛行軌跡做出調整。
(4)提升智能集群對抗技術
目前多智能體未完全智能化,需要人為充拔電,無法全天自主作業(yè),應升級為無線充電技術,這樣不僅能被遠程控制,而且能自主返回充電倉待機充電。
同時,技術的檢測跟蹤方面還需要提升。如Mask R_CNN目標檢測模型,這是兩階段模型,在目標檢測精度方面通常更好,能實現(xiàn)精細化目標實例分割,并且Mask R-CNN增加一個卷積網絡預測分割,對于檢測速度的影響很小,卻大大提高了目標狀態(tài)估計的準確率。
另外,UAV集群密度大,目標之間易交叉遮擋,影響跟蹤算法的性能,可以考慮對卡爾曼濾波進行調參,探索增量學習等,適應動態(tài)場景下的目標跟蹤。此外,應用時多考慮通信中斷等各種故障:采用容錯編碼、多路徑通信和多傳感器冗余等技術提高多智能體系統(tǒng)的容錯性;采用基于自主診斷、重構的自修復等算法提高自恢復能力;采用加密防護程序、安全驗證保護UAV間數(shù)據(jù)傳輸。
(5)提升智能激光武器技術
識別UAV集群時易受雜波干擾,可以在雜波抑制算法進行提升,增加檢測準確性,也可以采用一些更適用的自適應信號處理技術,如背景建模、動態(tài)閾值等,或者根據(jù)不同場景選擇適合的恒虛警率檢測算法,降低虛警概率,提高智能激光武器的精準度。
(6)構建一體化智能反制系統(tǒng)
為了保證反制行動的智能自主性和全面覆蓋性,使所有反制裝備取長補短,避免2019年鎧甲一SI導彈系統(tǒng)因無法同時運用2種武器,而丟失目標還被反向摧毀的類似事件再次發(fā)生,搭建一個能實現(xiàn)1+1gt;2組合增益效果的完整反制體系將是今后技術研發(fā)的主要方向。
在架構上,系統(tǒng)應包括地面和空中2個平臺[54],通過彌補每個平臺的局限性,最大限度地提高空間增益和防御力度,系統(tǒng)還應采用分布式異構網絡,平衡魯棒性和性能的關系,不過子網絡失控會導致特定任務不能完成,直接影響系統(tǒng)。因此,應在以往架構上進行優(yōu)化,確保系統(tǒng)持續(xù)可靠運行。
在系統(tǒng)設計上,察打一體、多層次防御、集成與協(xié)同、智能決策等主要模塊需要不斷更新完善。
(1)察打一體
當前各種探測、反制技術不能信息融合,造成了資源浪費,因此要加強多源數(shù)據(jù)融合算法研究,著力構建融合體系。既要對目標多維數(shù)據(jù)交叉融合,聯(lián)合分析研判,提高UAV集群的識別率,也要對復合反制信息進行特征融合,提高反制效能比,引入貝爾曼方程指導決策和更新值函數(shù)。從而形成一個組網聯(lián)動、優(yōu)勢互補、高低協(xié)同的多元一體反制體系,更有效地應對UAV集群入侵。
(2)多層次防御
多層次防御系統(tǒng)應包括早期預警系統(tǒng)、遠程攔截系統(tǒng)和近程武器系統(tǒng),共同集群中應對不同距離和高度的UAV。
早期預警系統(tǒng)識別UAV集群后,構建全連通圖模型[55],通過對節(jié)點密度聚類估計集群狀態(tài),一旦識別到威脅行為后會立刻報警。然而,如今UAV集群具有更強的隱蔽性和機動性,使得反制系統(tǒng)還屬于在普通場景下識別率才高的范疇,易導致系統(tǒng)產生虛警。因此,要不斷更新識別算法,降低虛警率。
遠程攔截系統(tǒng)包含微波、導彈和激光武器,同時,近程武器系統(tǒng)包含電子戰(zhàn)、集群對抗和防空網絡武器等多種技術手段,這2層防御相互協(xié)作,保證無漏網之魚。實際上,反制系統(tǒng)需要在短時間內快速響應集群威脅,目標分配存在不合理。因此,可利用啟發(fā)式、強化學習等優(yōu)化算法進行武器和目標分配,從而避免武器系統(tǒng)的資源浪費。
(3)集成與協(xié)同
這是系統(tǒng)成敗的關鍵,它集成了感知、反制等設備,統(tǒng)籌協(xié)調用于對抗UAV集群,通過模塊化部署,確保整體體系的協(xié)調運作。然而,現(xiàn)有的反制系統(tǒng)缺乏通用的接口架構,影響了互操作性,且各種信息化武器之間使用時存在干擾,限制了系統(tǒng)協(xié)同作戰(zhàn)能力。可見,集成在設計上需要改進,如建立網關對多維數(shù)據(jù)進行解析,或者采用模塊化開發(fā),方便模塊間互通和擴展,避免之間相互干擾,最終實現(xiàn)跨領域設備的協(xié)同發(fā)展。
(4)智能決策
客觀而言,反制系統(tǒng)實現(xiàn)了一定程度的自動化控制,但由于決策機制不夠全面,系統(tǒng)還未完全實現(xiàn)智能決策。為了改變這種現(xiàn)狀,應從場景、脆弱性角度來補充決策機制:分軍民場景部署硬軟殺傷武器,避免二次傷害,實現(xiàn)平戰(zhàn)一體,多重防控;根據(jù)編隊部署反制策略,面對規(guī)則編隊,自組織定點打擊,面對分布式編隊,可先干擾協(xié)同鏈路,或打擊通信最密點,破壞其協(xié)同行動后,再對集群范圍攻擊,一網打盡。
增強反制實際效能。比如反制系統(tǒng)如何部署才能確保有效覆蓋整個保護區(qū)域,以及在面對大規(guī)模UAV集群時,雖然結合使用不同的反制手段和策略,提高了反制效果,但能否實現(xiàn)對上千臺UAV規(guī)模的集群中每一架UAV的準確偵測和干擾,反制效果還待考察。為了攻克這一問題,系統(tǒng)應不斷提升自動化區(qū)域防護技術,為反制系統(tǒng)提供更多模擬場景,通過反復測驗,不斷改進,加強防護覆蓋率和反制性能。
總之,如何在保證反制裝備互不干擾、正常運行的前提下,實現(xiàn)反制系統(tǒng)的整體效能最大化是反UAV集群技術未來的主要發(fā)展方向。
5結束語
近年來,出現(xiàn)了多層次、多領域的UAV集群反制技術,并先后研究了網絡滲透、目標跟蹤、復合制導、點云數(shù)據(jù)處理和自主決策等算法的改進,使反UAV集群技術實現(xiàn)了一定的智能自主化能力。
在未來的工作中,反制技術需要在現(xiàn)有基礎上,著重以下三方面的工作:①注入最新的人工智能算法,準確監(jiān)測UAV集群的狀態(tài),加強各類反制技術的效能比,賦能反UAV集群技術產業(yè);②采用多模態(tài)的信息融合算法,避免傳統(tǒng)反制的資源分散、信息孤島等問題,加強反制設備之間的協(xié)作性;③選擇適合的智能決策算法,提高系統(tǒng)的自主學習能力,最大化系統(tǒng)的整體效能,以應對不同UAV集群的威脅。
總之,未來需要配合公安工作,形成理論與多元共治的復合式UAV集群防御解決方案,并加大對反制算法的研究力度,提高反制系統(tǒng)的偵測率和多目標處理能力,降低響應時間和虛警率,為國家空防和社會穩(wěn)定提供更加可靠的保障,為維護全球和平與安全貢獻一份力量。
