自動(dòng)跟隨多功能小車的設(shè)計(jì)與實(shí)現(xiàn)
2024-10-22 00:00:00楊蒙蒙趙志崢趙家昊宋芊芃張龍威
現(xiàn)代信息科技 2024年15期

摘 要:立足倉儲(chǔ)運(yùn)輸過程中效率低的痛點(diǎn),設(shè)計(jì)了基于STC89C52RC的一種自動(dòng)跟隨多功能智能小車,小車由紅外模塊、循跡模塊、避障模塊、超聲波模塊、藍(lán)牙模塊等組成。通過兩個(gè)超聲波測(cè)出與前方物體的距離判斷出小車的跟隨狀態(tài),并由液晶顯示屏顯示,利用舵機(jī)的轉(zhuǎn)向和超聲波模塊測(cè)出三個(gè)方向的距離,實(shí)現(xiàn)超聲波舵機(jī)避障;通過藍(lán)牙模塊實(shí)現(xiàn)手機(jī)與小車的連接,通過APP控制小車的運(yùn)動(dòng)狀態(tài),小車運(yùn)行速度快、效率高。
關(guān)鍵詞:STC89C52RC;自動(dòng)跟隨;紅外遙控;藍(lán)牙遙控
中圖分類號(hào):TN709;TP273 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2024)15-0010-05
Design and Implementation of an Automatic Following Multi-function Car
YANG Mengmeng1,2, ZHAO Zhizheng1,2, ZHAO Jiahao3, SONG Qianpeng1, ZHANG Longwei1
(1.School of Mechanical and Electrical Engineering, Huanghe Jiaotong University, Jiaozuo 454950, China;
2.Henan intelligent Robot Engineering and Technology Research Center in Jiaozuo City, Jiaozuo 454950, China;
3.Henan University of Science and Technology, Luoyang 471000, China)
Abstract: Based on the pain point of low efficiency in the process of storage and transportation, this paper designs an automatic following multi-function intelligent car, and the car consists of infrared module, tracking module, obstacle avoidance module, ultrasonic module, Bluetooth module and so on. Two ultrasonic waves are used to measure the distance to the object in front to determine the following status of the car and the LCD screen displays it. The distance in three directions is measured through the steering of the steering gear and ultrasonic module, and realizes the ultrasonic steering gear obstacle avoidance. It realizes the connection between the mobile phone and the car through the Bluetooth module, and controls the motion state of the car through the APP. The small car runs fast and it is efficient.
Keywords: STC89C52RC; automatic following; infrared remote control; blue tooth remote control
0 引 言
工業(yè)4.0和5G時(shí)代的到來,意味著未來智能制造的發(fā)展速度會(huì)越來越快,智能化產(chǎn)品的應(yīng)用場(chǎng)景將更加多元化,隨著各種智能化產(chǎn)品的出現(xiàn),許多人力工作正在被智能化所替代,實(shí)現(xiàn)了更高的效率。隨著科技信息技術(shù)的快速發(fā)展,物流行業(yè)也將迎來一個(gè)智能化的時(shí)代,傳統(tǒng)的人工分揀、存儲(chǔ)、運(yùn)輸?shù)纫呀?jīng)不能滿足大時(shí)代背景下人們對(duì)物流行業(yè)的要求,因此推動(dòng)物流行業(yè)的轉(zhuǎn)型升級(jí)迫在眉睫[1]。各種人工智能技術(shù)的優(yōu)勢(shì)越來越突出,通過這些技術(shù),使得中國物流快遞行業(yè)開始進(jìn)入一個(gè)新的發(fā)展時(shí)期,智能小車的發(fā)展將促進(jìn)物流行業(yè)的發(fā)展與轉(zhuǎn)型,也可以滿足人民日益增長的美好生活需求。
國外對(duì)于智能小車的研究開始于20世紀(jì)60年代,人類歷史上第一臺(tái)智能小車是由斯坦福研究院(SRI)人工智能中心研制出了名為Shakey的自主移動(dòng)的智能小車,這輛小車的出現(xiàn)是智能小車發(fā)展的起點(diǎn),由于當(dāng)時(shí)的技術(shù)存在一些缺陷,這輛小車的運(yùn)算速度較緩慢。在之后的一段時(shí)間,各種智能小車層出不窮,如日本稻田大學(xué)研制的人形機(jī)器人,德國研發(fā)的智能工業(yè)機(jī)器人等。
清華大學(xué)在國家的資助下,從1988年開始研究智能車,并成功研制出THMR系列智能車,但還不是真正意義的智能車。在1992年,國防科技大學(xué)成功研制出了一輛智能小車,是中國自動(dòng)駕駛技術(shù)研發(fā)的開端,不通過人工干預(yù)就能實(shí)現(xiàn)自主行駛。在這之后,吉林大學(xué)研制了基于GPS的自動(dòng)駕駛智能車。
2015年宇通研發(fā)的無人駕駛客車完成了首次無人干預(yù)的道路測(cè)試并取得成功,阿里與上汽集團(tuán)合作,百度與金龍客車等,互聯(lián)網(wǎng)與汽車結(jié)合,形成了更加智能的網(wǎng)聯(lián)車。目前,我國的智能車研究已進(jìn)入了L4和L5階段,廣州生物島文遠(yuǎn)小巴的投入使用,標(biāo)志著無人智能車開始進(jìn)入了商業(yè)化應(yīng)用,諸如長城汽車、長安汽車、廣汽集團(tuán)等企業(yè)、高校等也陸續(xù)開啟了無人駕駛智能汽車等方面的研發(fā)并取得了一定成績(jī)[2-5]。
1 系統(tǒng)方案
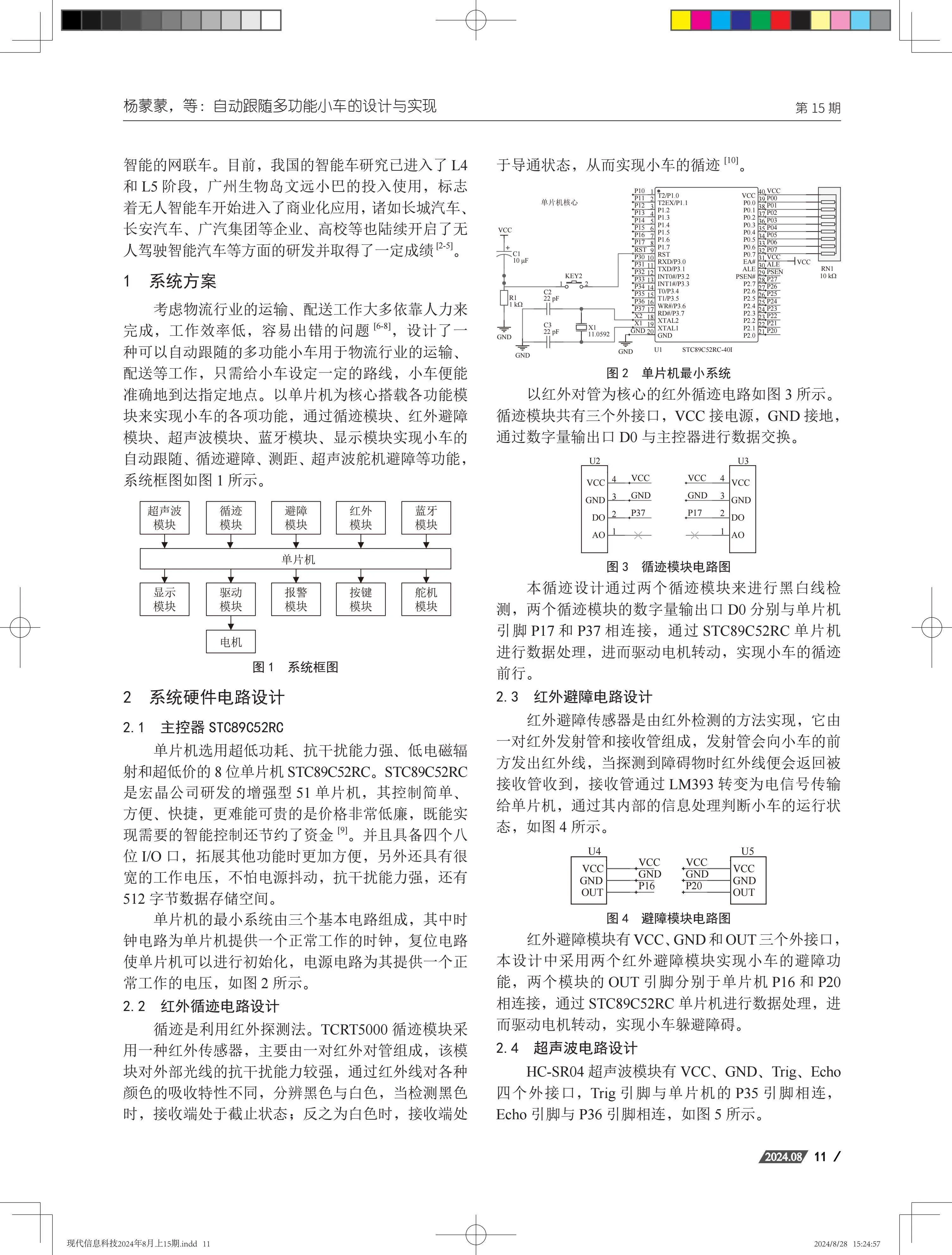
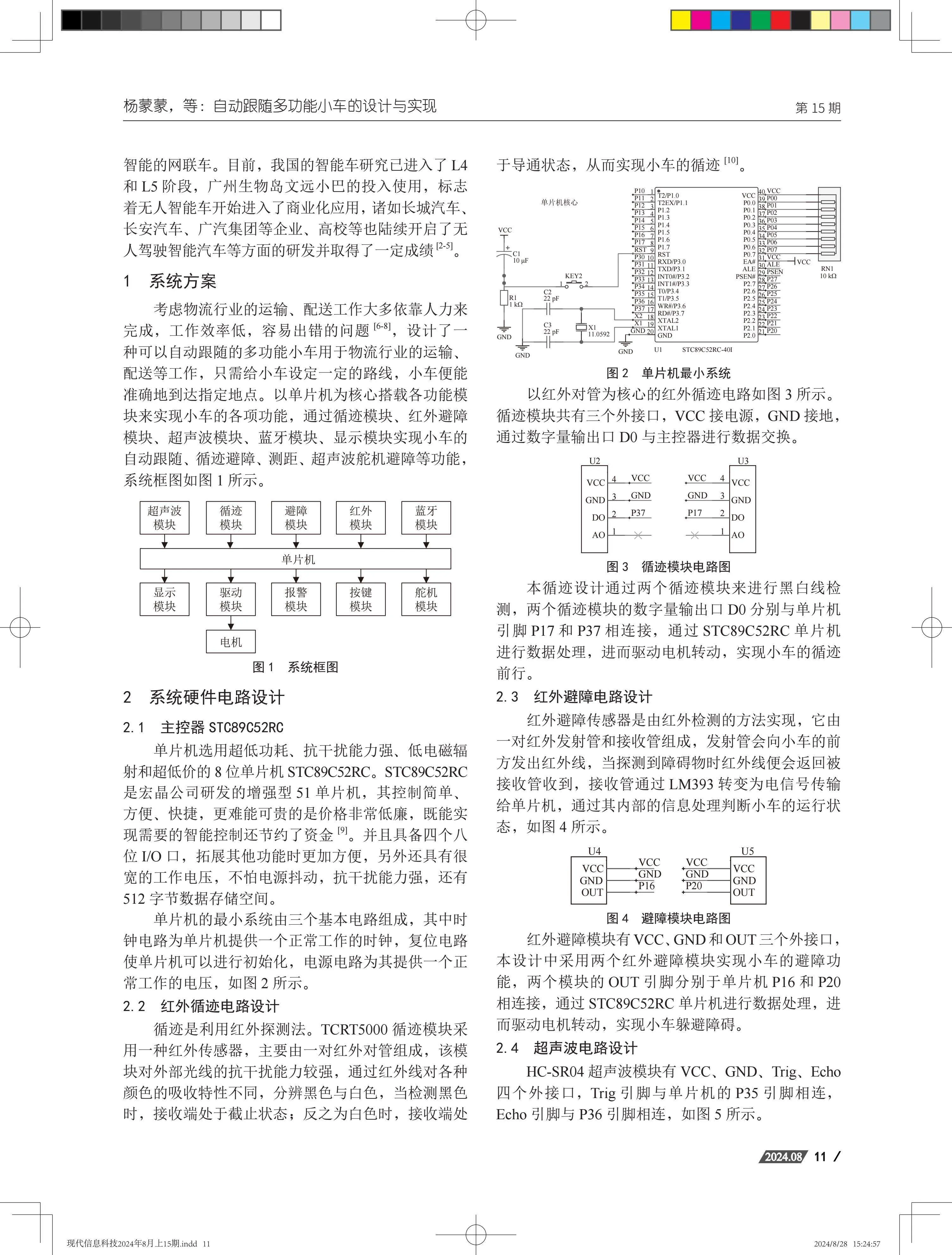
考慮物流行業(yè)的運(yùn)輸、配送工作大多依靠人力來完成,工作效率低,容易出錯(cuò)的問題[6-8],設(shè)計(jì)了一種可以自動(dòng)跟隨的多功能小車用于物流行業(yè)的運(yùn)輸、配送等工作,只需給小車設(shè)定一定的路線,小車便能準(zhǔn)確地到達(dá)指定地點(diǎn)。以單片機(jī)為核心搭載各功能模塊來實(shí)現(xiàn)小車的各項(xiàng)功能,通過循跡模塊、紅外避障模塊、超聲波模塊、藍(lán)牙模塊、顯示模塊實(shí)現(xiàn)小車的自動(dòng)跟隨、循跡避障、測(cè)距、超聲波舵機(jī)避障等功能,系統(tǒng)框圖如圖1所示。
2 系統(tǒng)硬件電路設(shè)計(jì)
2.1 主控器STC89C52RC
單片機(jī)選用超低功耗、抗干擾能力強(qiáng)、低電磁輻射和超低價(jià)的8位單片機(jī)STC89C52RC。STC89C52RC是宏晶公司研發(fā)的增強(qiáng)型51單片機(jī),其控制簡(jiǎn)單、方便、快捷,更難能可貴的是價(jià)格非常低廉,既能實(shí)現(xiàn)需要的智能控制還節(jié)約了資金[9]。并且具備四個(gè)八位I/O口,拓展其他功能時(shí)更加方便,另外還具有很寬的工作電壓,不怕電源抖動(dòng),抗干擾能力強(qiáng),還有512字節(jié)數(shù)據(jù)存儲(chǔ)空間。
單片機(jī)的最小系統(tǒng)由三個(gè)基本電路組成,其中時(shí)鐘電路為單片機(jī)提供一個(gè)正常工作的時(shí)鐘,復(fù)位電路使單片機(jī)可以進(jìn)行初始化,電源電路為其提供一個(gè)正常工作的電壓,如圖2所示。
2.2 紅外循跡電路設(shè)計(jì)
循跡是利用紅外探測(cè)法。TCRT5000循跡模塊采用一種紅外傳感器,主要由一對(duì)紅外對(duì)管組成,該模塊對(duì)外部光線的抗干擾能力較強(qiáng),通過紅外線對(duì)各種顏色的吸收特性不同,分辨黑色與白色,當(dāng)檢測(cè)黑色時(shí),接收端處于截止?fàn)顟B(tài);反之為白色時(shí),接收端處于導(dǎo)通狀態(tài),從而實(shí)現(xiàn)小車的循跡[10]。
以紅外對(duì)管為核心的紅外循跡電路如圖3所示。循跡模塊共有三個(gè)外接口,VCC接電源,GND接地,通過數(shù)字量輸出口D0與主控器進(jìn)行數(shù)據(jù)交換。
本循跡設(shè)計(jì)通過兩個(gè)循跡模塊來進(jìn)行黑白線檢測(cè),兩個(gè)循跡模塊的數(shù)字量輸出口D0分別與單片機(jī)引腳P17和P37相連接,通過STC89C52RC單片機(jī)進(jìn)行數(shù)據(jù)處理,進(jìn)而驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),實(shí)現(xiàn)小車的循跡前行。
2.3 紅外避障電路設(shè)計(jì)
紅外避障傳感器是由紅外檢測(cè)的方法實(shí)現(xiàn),它由一對(duì)紅外發(fā)射管和接收管組成,發(fā)射管會(huì)向小車的前方發(fā)出紅外線,當(dāng)探測(cè)到障礙物時(shí)紅外線便會(huì)返回被接收管收到,接收管通過LM393轉(zhuǎn)變?yōu)殡娦盘?hào)傳輸給單片機(jī),通過其內(nèi)部的信息處理判斷小車的運(yùn)行狀態(tài),如圖4所示。
紅外避障模塊有VCC、GND和OUT三個(gè)外接口,本設(shè)計(jì)中采用兩個(gè)紅外避障模塊實(shí)現(xiàn)小車的避障功能,兩個(gè)模塊的OUT引腳分別于單片機(jī)P16和P20相連接,通過STC89C52RC單片機(jī)進(jìn)行數(shù)據(jù)處理,進(jìn)而驅(qū)動(dòng)電機(jī)轉(zhuǎn)動(dòng),實(shí)現(xiàn)小車躲避障礙。
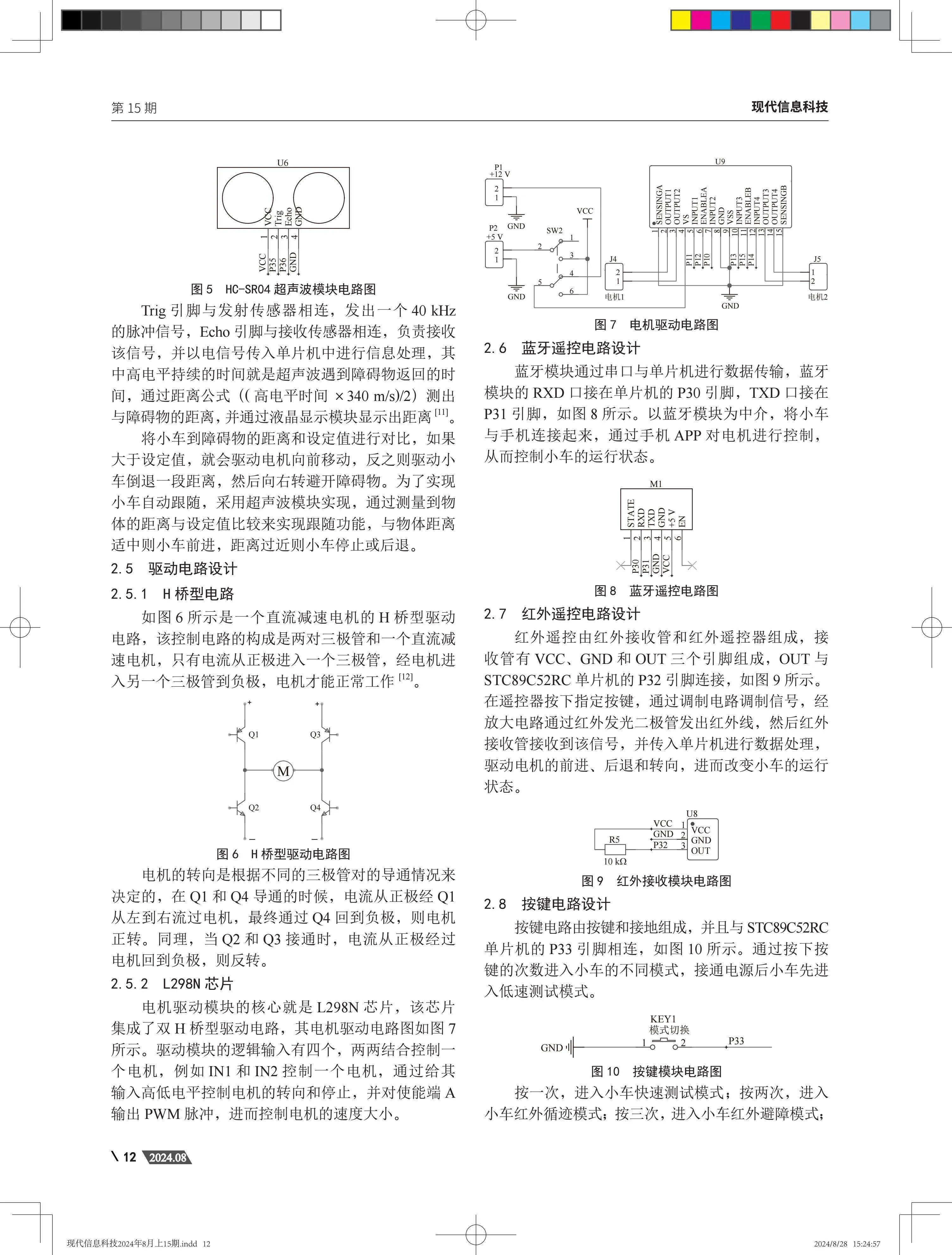
2.4 超聲波電路設(shè)計(jì)
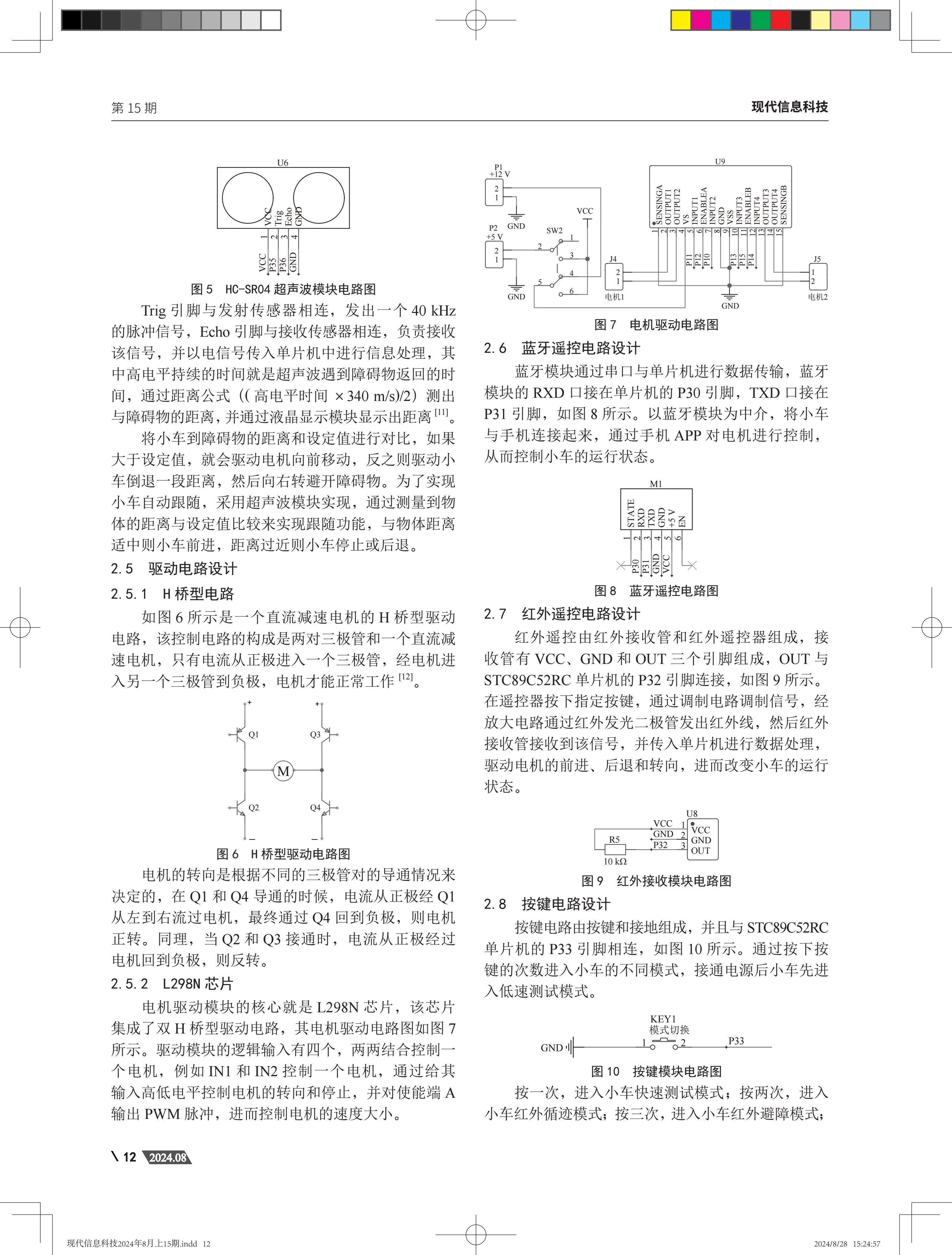
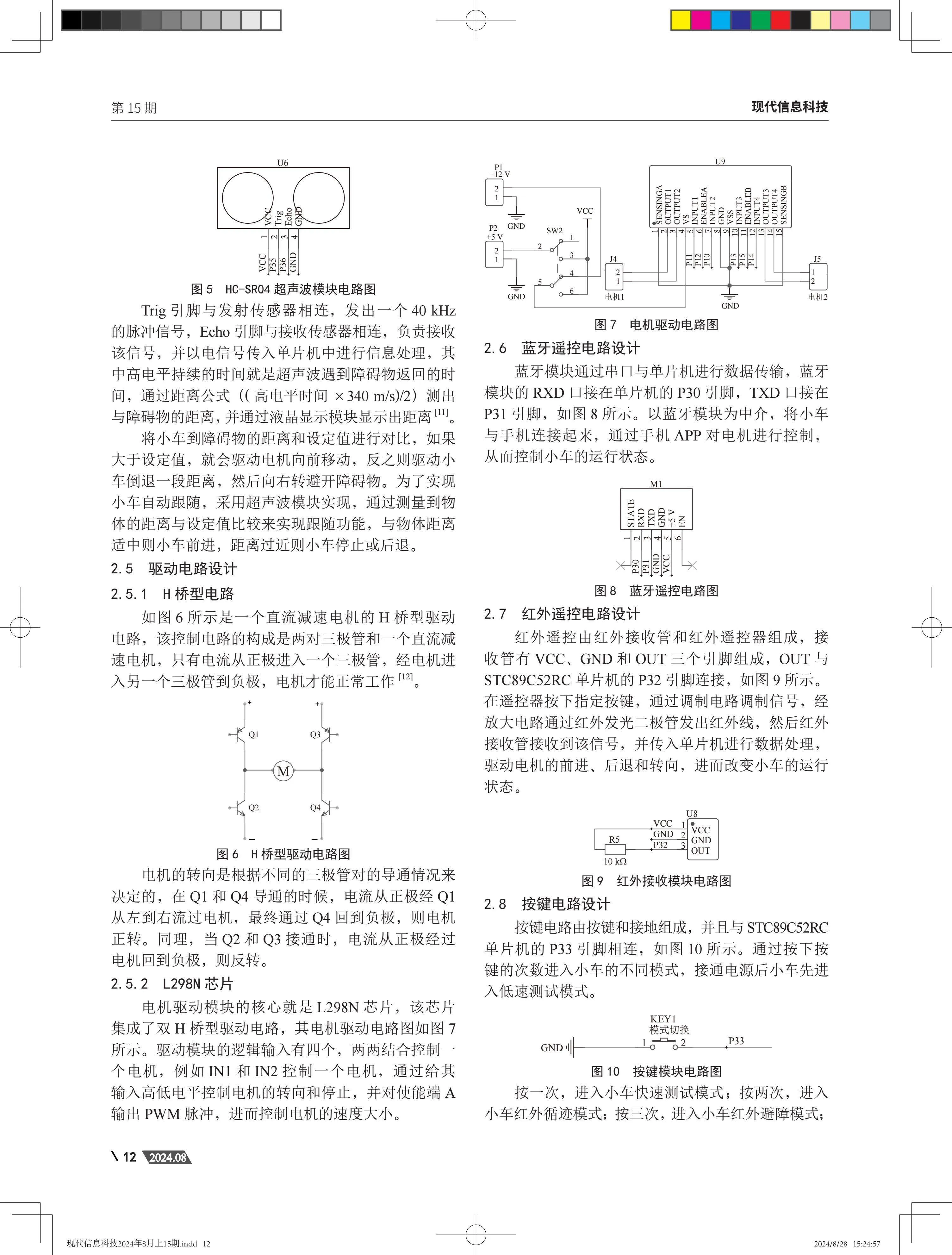
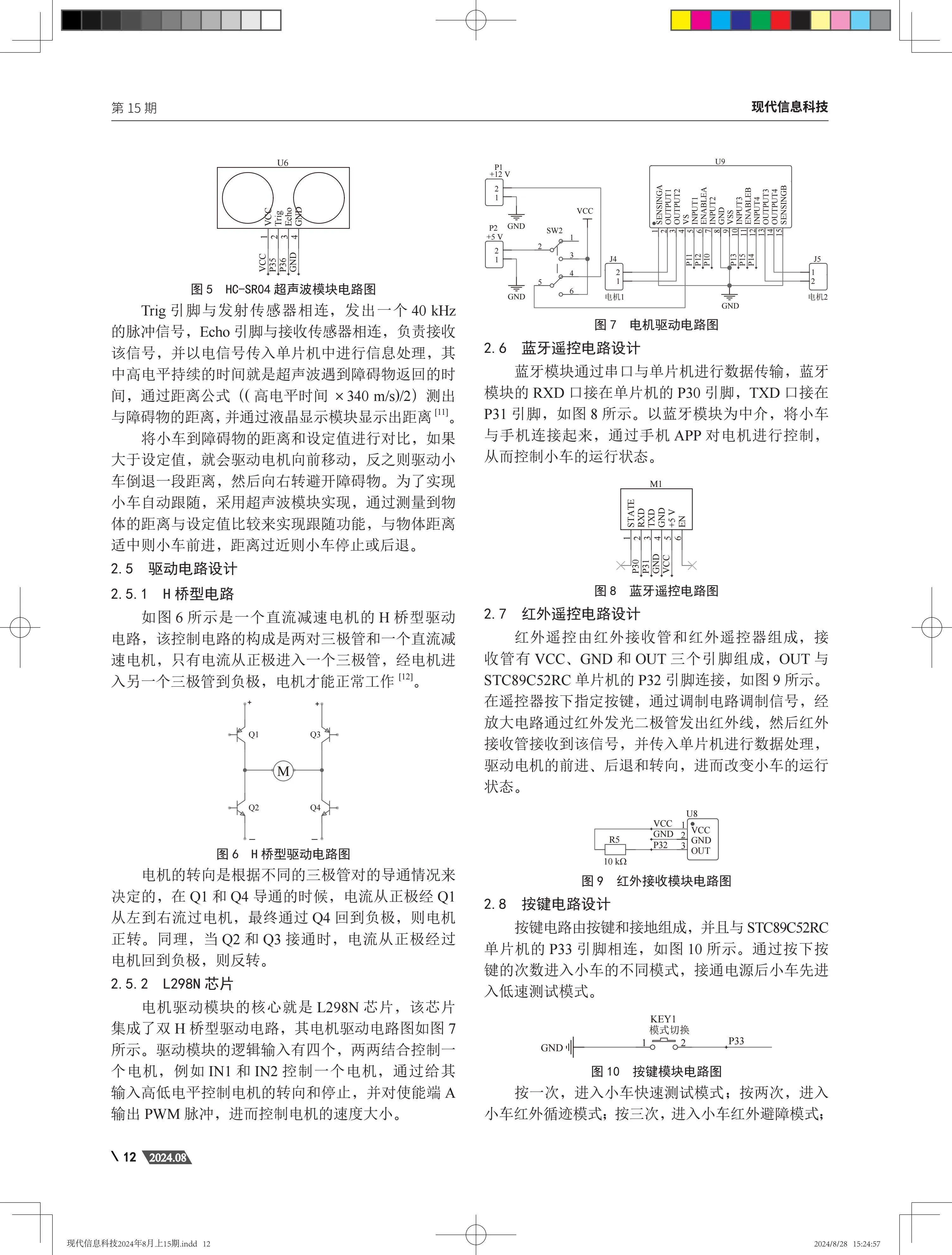
HC-SR04超聲波模塊有VCC、GND、Trig、Echo四個(gè)外接口,Trig引腳與單片機(jī)的P35引腳相連,Echo引腳與P36引腳相連,如圖5所示。
Trig引腳與發(fā)射傳感器相連,發(fā)出一個(gè)40 kHz的脈沖信號(hào),Echo引腳與接收傳感器相連,負(fù)責(zé)接收該信號(hào),并以電信號(hào)傳入單片機(jī)中進(jìn)行信息處理,其中高電平持續(xù)的時(shí)間就是超聲波遇到障礙物返回的時(shí)間,通過距離公式((高電平時(shí)間×340 m/s)/2)測(cè)出與障礙物的距離,并通過液晶顯示模塊顯示出距離[11]。
將小車到障礙物的距離和設(shè)定值進(jìn)行對(duì)比,如果大于設(shè)定值,就會(huì)驅(qū)動(dòng)電機(jī)向前移動(dòng),反之則驅(qū)動(dòng)小車倒退一段距離,然后向右轉(zhuǎn)避開障礙物。為了實(shí)現(xiàn)小車自動(dòng)跟隨,采用超聲波模塊實(shí)現(xiàn),通過測(cè)量到物體的距離與設(shè)定值比較來實(shí)現(xiàn)跟隨功能,與物體距離適中則小車前進(jìn),距離過近則小車停止或后退。
2.5 驅(qū)動(dòng)電路設(shè)計(jì)
2.5.1 H橋型電路
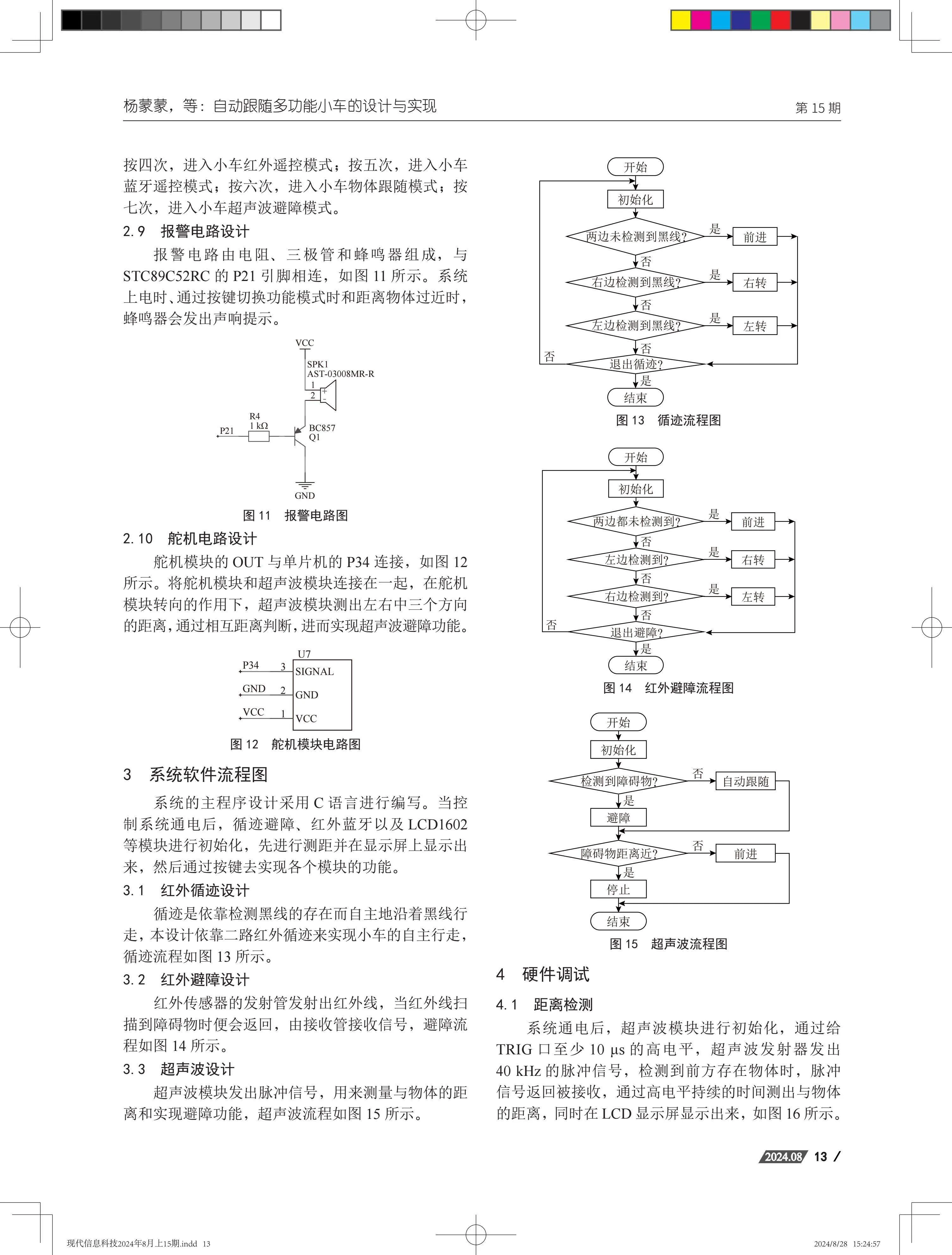
如圖6所示是一個(gè)直流減速電機(jī)的H橋型驅(qū)動(dòng)電路,該控制電路的構(gòu)成是兩對(duì)三極管和一個(gè)直流減速電機(jī),只有電流從正極進(jìn)入一個(gè)三極管,經(jīng)電機(jī)進(jìn)入另一個(gè)三極管到負(fù)極,電機(jī)才能正常工作[12]。
電機(jī)的轉(zhuǎn)向是根據(jù)不同的三極管對(duì)的導(dǎo)通情況來決定的,在Q1和Q4導(dǎo)通的時(shí)候,電流從正極經(jīng)Q1從左到右流過電機(jī),最終通過Q4回到負(fù)極,則電機(jī)正轉(zhuǎn)。同理,當(dāng)Q2和Q3接通時(shí),電流從正極經(jīng)過電機(jī)回到負(fù)極,則反轉(zhuǎn)。
2.5.2 L298N芯片
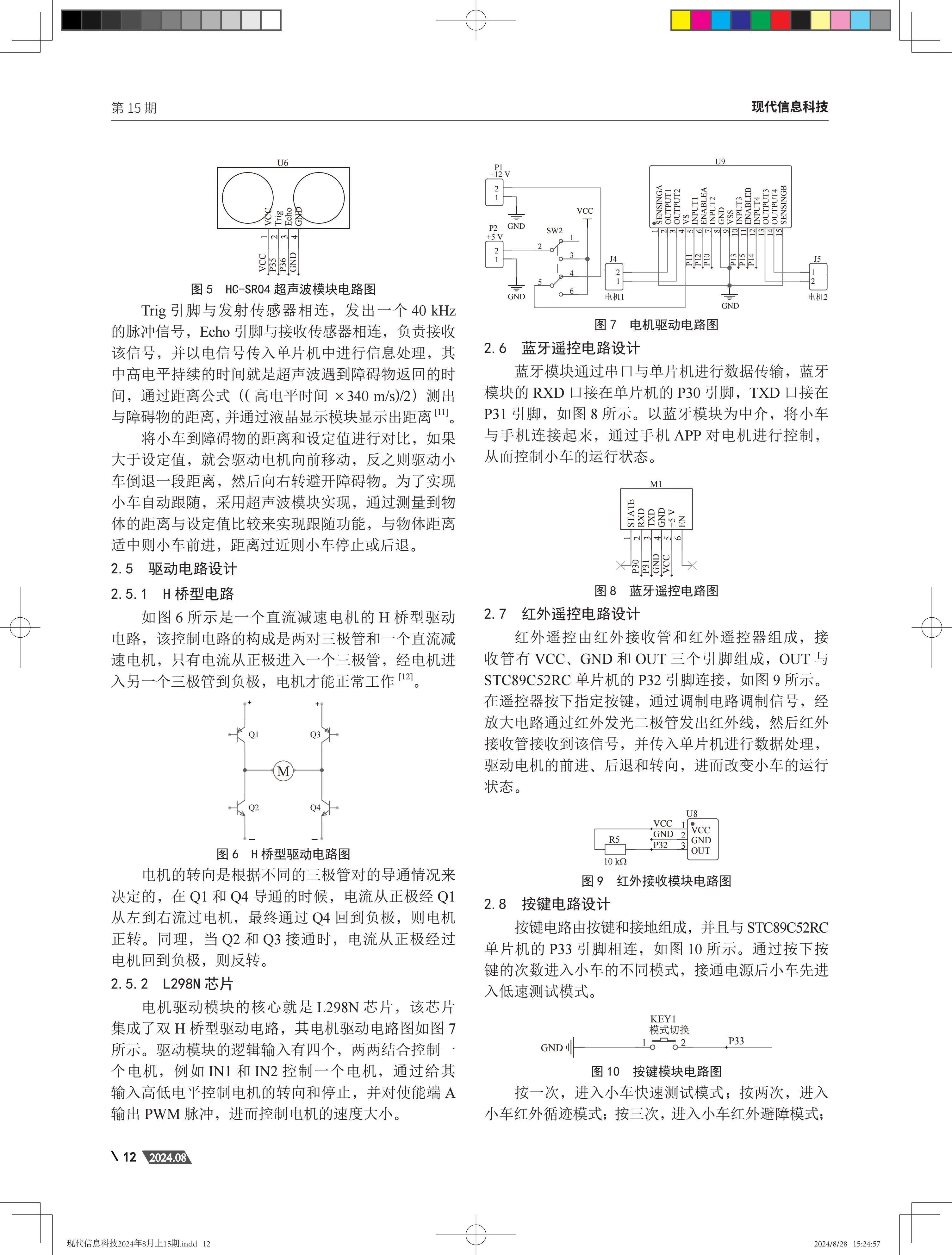
電機(jī)驅(qū)動(dòng)模塊的核心就是L298N芯片,該芯片集成了雙H橋型驅(qū)動(dòng)電路,其電機(jī)驅(qū)動(dòng)電路圖如圖7所示。驅(qū)動(dòng)模塊的邏輯輸入有四個(gè),兩兩結(jié)合控制一個(gè)電機(jī),例如IN1和IN2控制一個(gè)電機(jī),通過給其輸入高低電平控制電機(jī)的轉(zhuǎn)向和停止,并對(duì)使能端A輸出PWM脈沖,進(jìn)而控制電機(jī)的速度大小。
2.6 藍(lán)牙遙控電路設(shè)計(jì)
藍(lán)牙模塊通過串口與單片機(jī)進(jìn)行數(shù)據(jù)傳輸,藍(lán)牙模塊的RXD口接在單片機(jī)的P30引腳,TXD口接在P31引腳,如圖8所示。以藍(lán)牙模塊為中介,將小車與手機(jī)連接起來,通過手機(jī)APP對(duì)電機(jī)進(jìn)行控制,從而控制小車的運(yùn)行狀態(tài)。
2.7 紅外遙控電路設(shè)計(jì)
紅外遙控由紅外接收管和紅外遙控器組成,接收管有VCC、GND和OUT三個(gè)引腳組成,OUT與STC89C52RC單片機(jī)的P32引腳連接,如圖9所示。在遙控器按下指定按鍵,通過調(diào)制電路調(diào)制信號(hào),經(jīng)放大電路通過紅外發(fā)光二極管發(fā)出紅外線,然后紅外接收管接收到該信號(hào),并傳入單片機(jī)進(jìn)行數(shù)據(jù)處理,驅(qū)動(dòng)電機(jī)的前進(jìn)、后退和轉(zhuǎn)向,進(jìn)而改變小車的運(yùn)行狀態(tài)。
2.8 按鍵電路設(shè)計(jì)
按鍵電路由按鍵和接地組成,并且與STC89C52RC單片機(jī)的P33引腳相連,如圖10所示。通過按下按鍵的次數(shù)進(jìn)入小車的不同模式,接通電源后小車先進(jìn)入低速測(cè)試模式。
按一次,進(jìn)入小車快速測(cè)試模式;按兩次,進(jìn)入小車紅外循跡模式;按三次,進(jìn)入小車紅外避障模式;按四次,進(jìn)入小車紅外遙控模式;按五次,進(jìn)入小車藍(lán)牙遙控模式;按六次,進(jìn)入小車物體跟隨模式;按七次,進(jìn)入小車超聲波避障模式。
2.9 報(bào)警電路設(shè)計(jì)
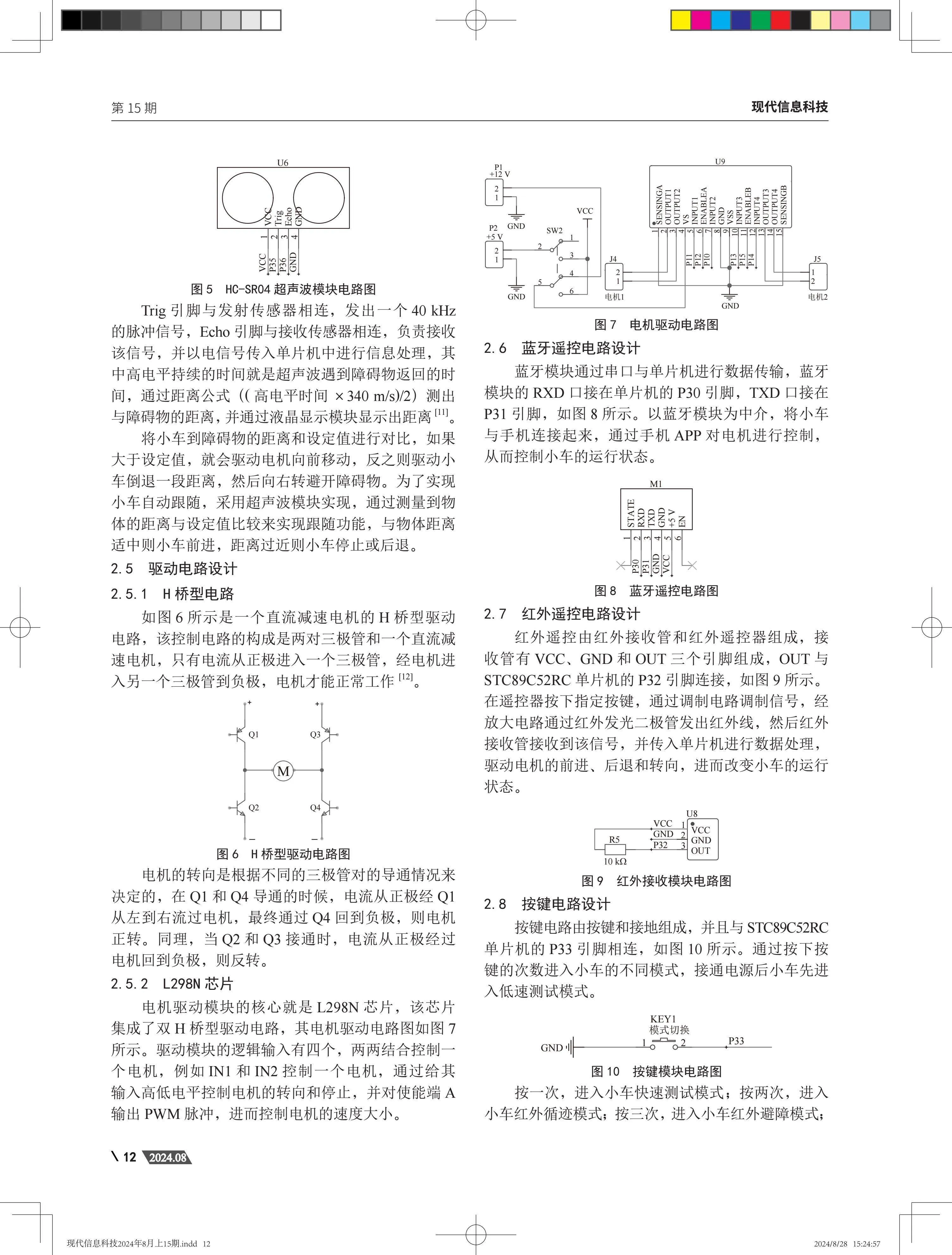
報(bào)警電路由電阻、三極管和蜂鳴器組成,與STC89C52RC的P21引腳相連,如圖11所示。系統(tǒng)上電時(shí)、通過按鍵切換功能模式時(shí)和距離物體過近時(shí),蜂鳴器會(huì)發(fā)出聲響提示。
2.10 舵機(jī)電路設(shè)計(jì)
舵機(jī)模塊的OUT與單片機(jī)的P34連接,如圖12所示。將舵機(jī)模塊和超聲波模塊連接在一起,在舵機(jī)模塊轉(zhuǎn)向的作用下,超聲波模塊測(cè)出左右中三個(gè)方向的距離,通過相互距離判斷,進(jìn)而實(shí)現(xiàn)超聲波避障功能。
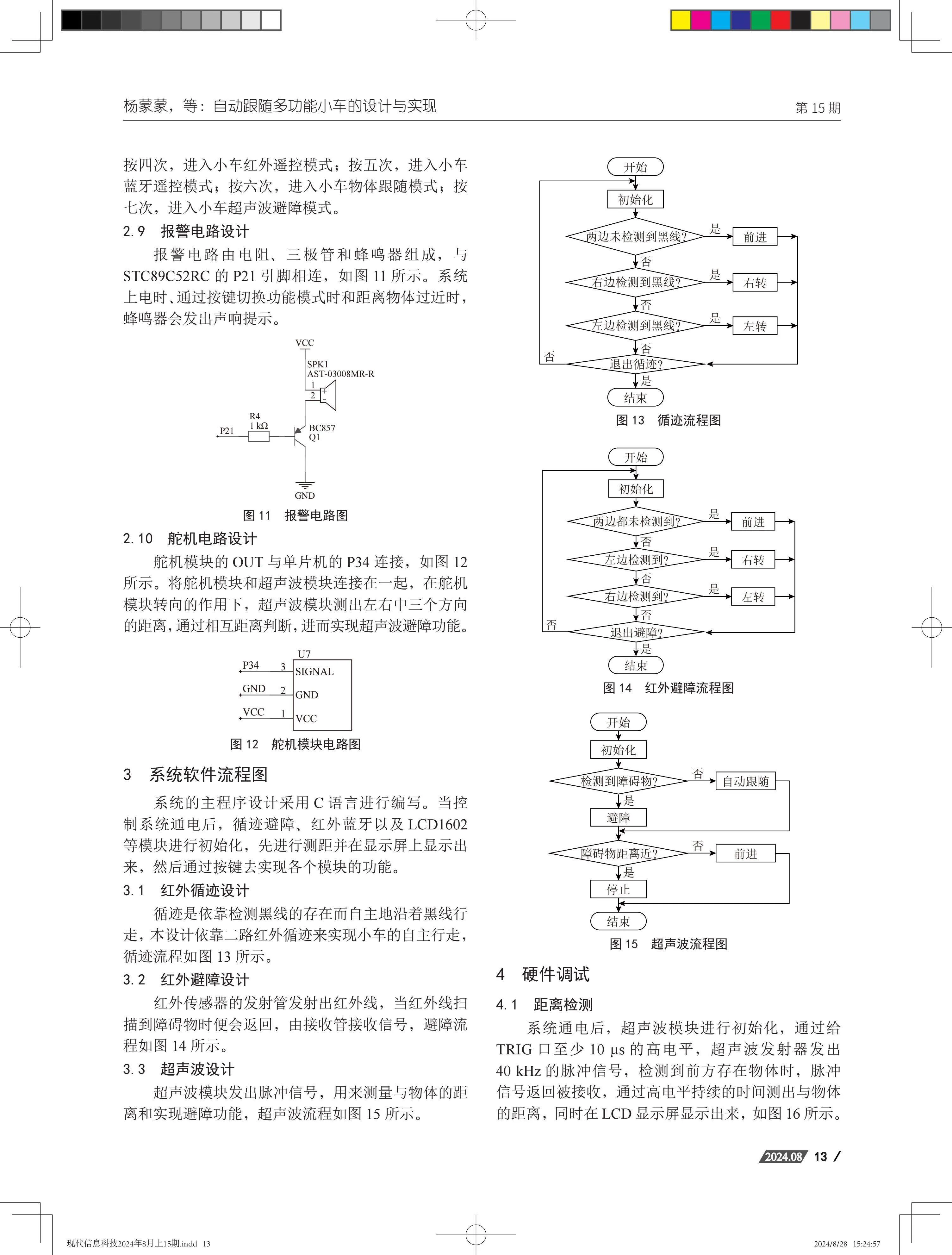
3 系統(tǒng)軟件流程圖
系統(tǒng)的主程序設(shè)計(jì)采用C語言進(jìn)行編寫。當(dāng)控制系統(tǒng)通電后,循跡避障、紅外藍(lán)牙以及LCD1602等模塊進(jìn)行初始化,先進(jìn)行測(cè)距并在顯示屏上顯示出來,然后通過按鍵去實(shí)現(xiàn)各個(gè)模塊的功能。
3.1 紅外循跡設(shè)計(jì)
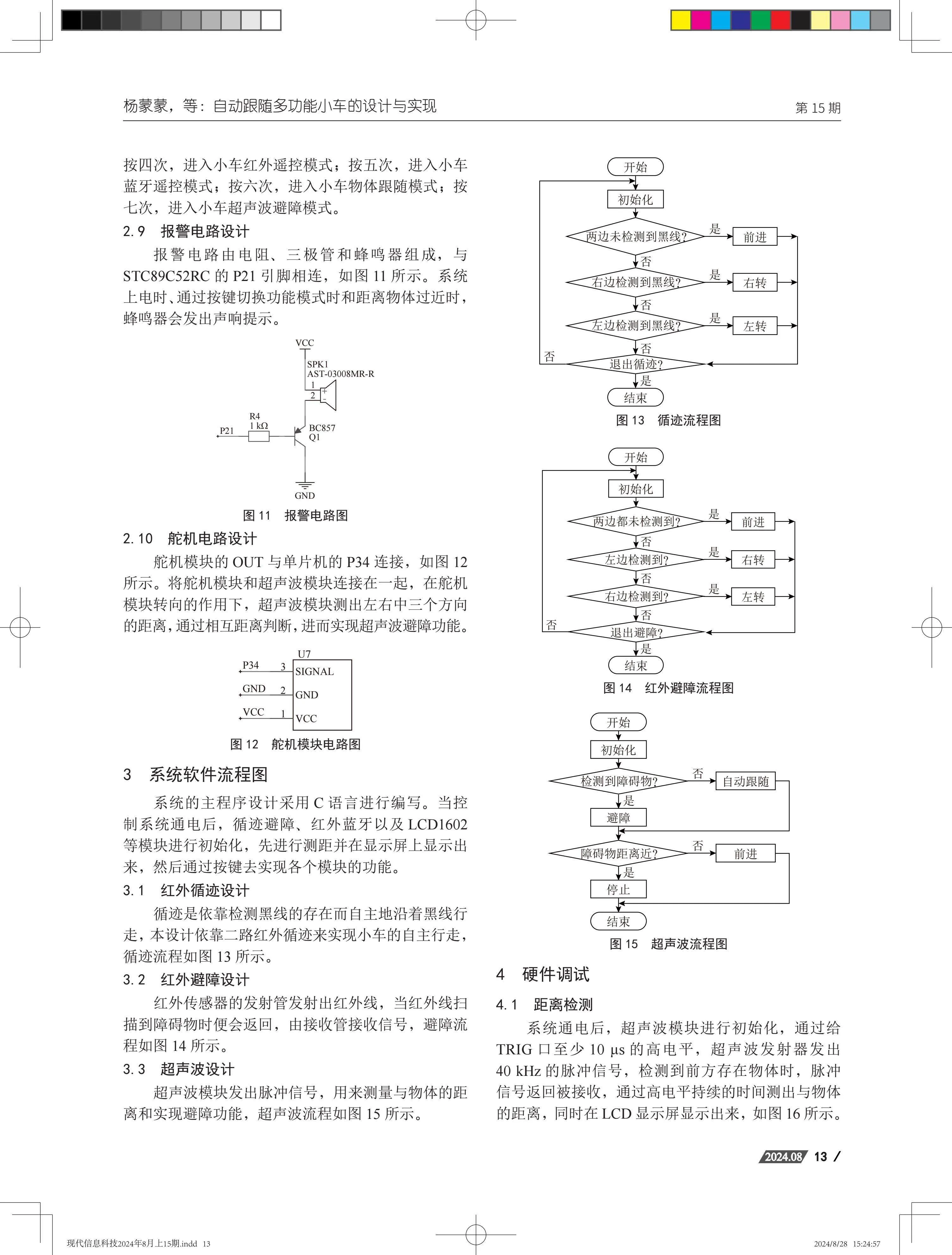
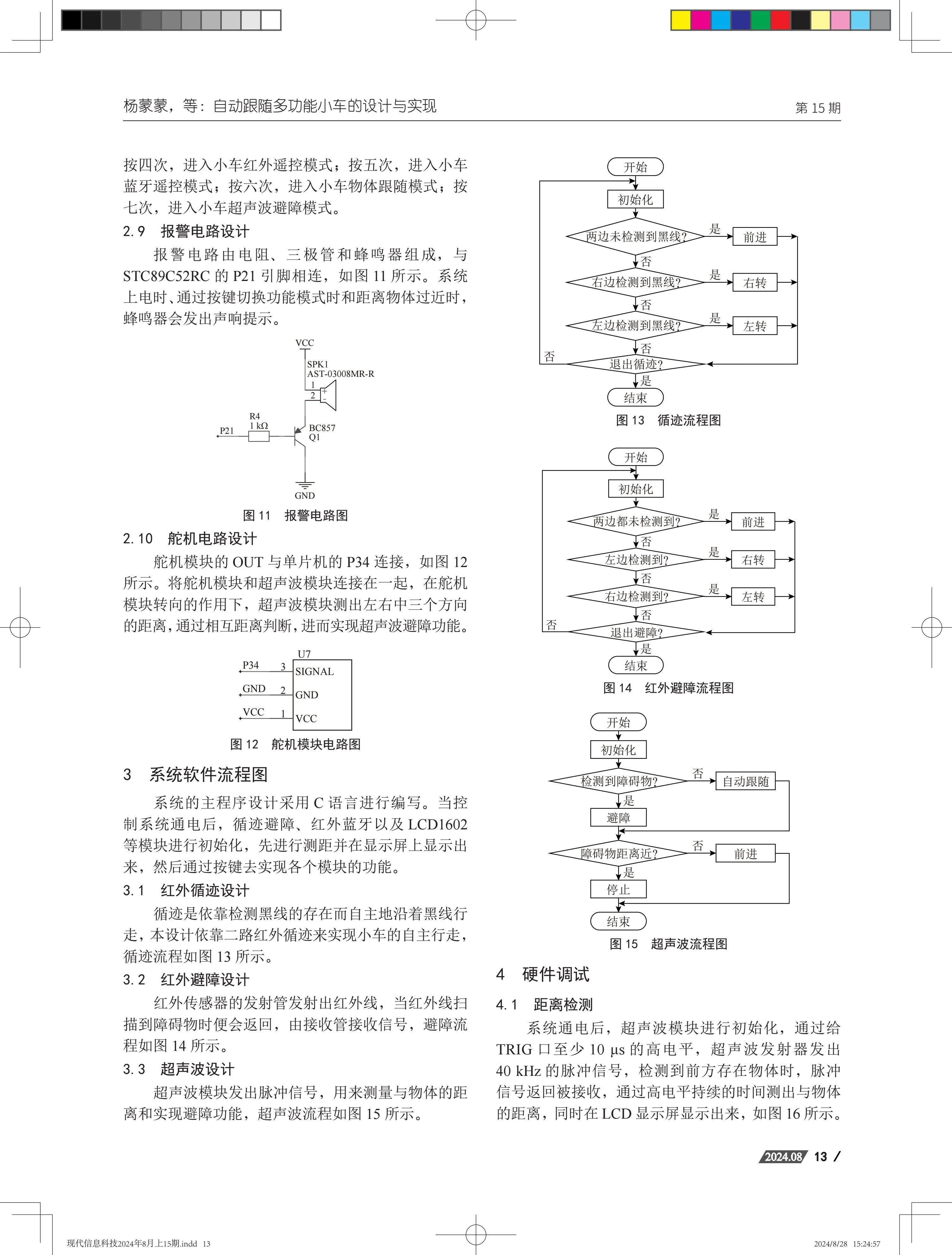
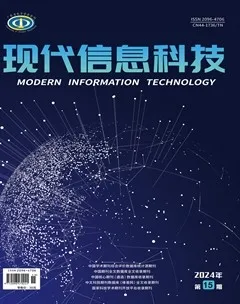
循跡是依靠檢測(cè)黑線的存在而自主地沿著黑線行走,本設(shè)計(jì)依靠二路紅外循跡來實(shí)現(xiàn)小車的自主行走,循跡流程如圖13所示。
3.2 紅外避障設(shè)計(jì)
紅外傳感器的發(fā)射管發(fā)射出紅外線,當(dāng)紅外線掃描到障礙物時(shí)便會(huì)返回,由接收管接收信號(hào),避障流程如圖14所示。
3.3 超聲波設(shè)計(jì)
超聲波模塊發(fā)出脈沖信號(hào),用來測(cè)量與物體的距離和實(shí)現(xiàn)避障功能,超聲波流程如圖15所示。
4 硬件調(diào)試
4.1 距離檢測(cè)
系統(tǒng)通電后,超聲波模塊進(jìn)行初始化,通過給TRIG口至少10 μs的高電平,超聲波發(fā)射器發(fā)出40 kHz的脈沖信號(hào),檢測(cè)到前方存在物體時(shí),脈沖信號(hào)返回被接收,通過高電平持續(xù)的時(shí)間測(cè)出與物體的距離,同時(shí)在LCD顯示屏顯示出來,如圖16所示。
4.2 紅外循跡
小車的循跡功能是根據(jù)紅外線區(qū)別黑線與其他顏色的特點(diǎn),在本設(shè)計(jì)中選擇兩個(gè)紅外避障模塊。當(dāng)兩個(gè)模塊都沒有識(shí)別到黑線,則小車前進(jìn);右邊識(shí)別到黑線,小車右轉(zhuǎn),并通過報(bào)警電路提醒;左邊識(shí)別到黑線,小車左轉(zhuǎn),并報(bào)警;左右都識(shí)別到,小車停止,如圖17所示。
4.3 藍(lán)牙遙控
通過藍(lán)牙模塊與手機(jī)的藍(lán)牙相連接,通過APP軟件控制小車的運(yùn)行狀態(tài),如圖18所示。APP軟件共有四個(gè)箭頭和一個(gè)圓圈,上下的箭頭控制著小車的前進(jìn)和后退,左右的箭頭控制著小車的左轉(zhuǎn)和右轉(zhuǎn),中間的圓圈控制小車的停止。
4.4 自動(dòng)跟隨
小車的自動(dòng)跟隨功能是通過超聲波模塊實(shí)現(xiàn),通過超聲波模塊測(cè)出與前方物體的距離,然后判斷兩者之間的距離,小于5 cm后退,大于5 cm且小于10 cm則停止,大于10 cm小于60 cm前進(jìn),大于60 cm處于停止?fàn)顟B(tài),如圖19所示。
5 結(jié) 論
本文主要是對(duì)一種具有自動(dòng)跟隨、紅外遙控、紅外循跡避障、藍(lán)牙遙控、超聲波避障和報(bào)警等功能的智能小車控制系統(tǒng)進(jìn)行了研究。采用STC89C52RC作為主控芯片,由紅外循跡、避障、電機(jī)驅(qū)動(dòng)、超聲波、紅外遙控、藍(lán)牙和報(bào)警等模塊組成控制系統(tǒng)。自動(dòng)跟隨由超聲波模塊實(shí)現(xiàn),通過兩個(gè)超聲波測(cè)出與前方物體的距離判斷出小車的跟隨狀態(tài),液晶顯示屏顯示測(cè)出的距離,通過舵機(jī)的轉(zhuǎn)向和超聲波測(cè)出三個(gè)方向的距離,實(shí)現(xiàn)超聲波舵機(jī)避障;藍(lán)牙模塊實(shí)現(xiàn)手機(jī)與小車的連接,通過APP控制小車的運(yùn)動(dòng)狀態(tài),當(dāng)紅外遙控器按下指定按鍵,經(jīng)信號(hào)調(diào)制并放大被紅外接收管接收,進(jìn)而控制小車的運(yùn)動(dòng)狀態(tài)。以上這些功能會(huì)通過按鍵切換工作模式,每切換一次蜂鳴器會(huì)發(fā)出聲音提醒。
參考文獻(xiàn):
[1] 余佳桐,孫雨婷,朱翊銘,等.基于激光雷達(dá)和視覺融合的室內(nèi)導(dǎo)航方法設(shè)計(jì) [J].傳感器與微系統(tǒng),2023,42(8):69-72.
[2] 楊釗燦,沈永峰,陳飛洋.基于LPC54606的智能小車控制系統(tǒng) [J].實(shí)驗(yàn)室研究與探索,2023,42(6):106-111.
[3] 劉西,明朗,王猛,等.基于智能小車的路徑跟蹤快速開發(fā)方法 [J].機(jī)械設(shè)計(jì)與制造,2023(4):51-55.
[4] 俞洋,李峰,繆奕揚(yáng).基于機(jī)器視覺的全元素賽道智能小車實(shí)驗(yàn)系統(tǒng)設(shè)計(jì)與應(yīng)用 [J].中南民族大學(xué)學(xué)報(bào):自然科學(xué)版,2022,41(6):689-696.
[5] 李成勇,王莎,陳成瑞.基于CMOS圖像采集的車道偏移識(shí)別系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn) [J].中國測(cè)試,2022,48(6):106-110.
[6] 李曉明,黃慧,應(yīng)毅,等.基于圖像置信度修正的智能小車導(dǎo)航目標(biāo)快速跟蹤算法 [J].國外電子測(cè)量技術(shù),2022,41(2):162-168.
[7] 李飛,胡坤,張勇.基于ROS的語音導(dǎo)航智能小車設(shè)計(jì)與研究 [J].機(jī)械設(shè)計(jì)與研究,2021,37(6):46-52+65.
[8] 王毅,王愷,張藝譚,等.基于超聲波傳感器的智能跟隨系統(tǒng)設(shè)計(jì) [J].傳感器與微系統(tǒng),2021,40(8):92-95.
[9] 楊麗莎,邵檢江.全自動(dòng)蔬菜移栽機(jī)的設(shè)計(jì)與試驗(yàn) [J].農(nóng)機(jī)化研究,2021,43(1):52-56.
[10] 朱曉艷,翁錢春.紅外近場(chǎng)輻射探測(cè)及超分辨溫度成像 [J].紅外與毫米波學(xué)報(bào),2023,42(5):569-573.
[11] 李衛(wèi)鵬,買買提明·艾尼,加合甫·阿汗,等.移動(dòng)機(jī)器人超聲波測(cè)距避障系統(tǒng)實(shí)驗(yàn)測(cè)試 [J].機(jī)床與液壓,2022,50(5):1-5.
[12] 徐婉瑩,鄭聰慧,許建中,等.級(jí)聯(lián)H橋型電力電子變壓器平均值模型 [J].電力自動(dòng)化設(shè)備,2023,43(6):190-196.
作者簡(jiǎn)介:楊蒙蒙(1989.01—),女,漢族,河南焦作人,講師,碩士,研究方向:網(wǎng)絡(luò)化控制系統(tǒng)。
- 現(xiàn)代信息科技的其它文章
- “三位一體”人才培養(yǎng)模式下帶傳動(dòng)虛擬仿真實(shí)驗(yàn)設(shè)計(jì)與教學(xué)實(shí)踐
- 基于1+X平臺(tái)的工業(yè)機(jī)器人實(shí)訓(xùn)課程虛擬仿真教學(xué)研究
- 區(qū)塊鏈技術(shù)在公路貨車動(dòng)態(tài)檢測(cè)系統(tǒng)中的應(yīng)用研究
- 三角島生態(tài)物聯(lián)網(wǎng)系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 基于STM32的多功能智慧照明系統(tǒng)設(shè)計(jì)
- DoH隱蔽隧道檢測(cè)綜述