不同形式齒軌車輛動態特性研究
2024-10-14 00:00:00陳兆瑋袁密奧李世輝易虹雨楊吉忠陳志輝
振動工程學報 2024年9期













摘要: 為了提高軌道車輛的爬坡能力,齒軌車輛在傳統軌道車輛的基礎上加入了齒輪?齒軌嚙合系統。針對目前世界上的齒軌鐵路系統種類較多,其配備齒輪?齒軌嚙合系統多樣性所導致的齒軌車輛動態特性差異的問題,本文在解析齒輪?齒軌嚙合激擾產生機理的基礎上,考慮齒輪?齒軌嚙合沖擊,建立了兩類Strub系統、雙排齒Abt系統以及Locher系統四種不同形式的齒軌車輛動力學模型,并對模型進行了實驗驗證;采用所建立的模型,分析了齒軌車輛以不同速度在坡道嚙合路段運行時的齒輪?齒軌嚙合行為,并探究了線路不平順對齒軌車輛齒輪?齒軌嚙合中心距誤差的影響;在此基礎上研究了齒軌車輛的輪軌作用以及車輛加速度,由此分析了齒軌車輛的安全性與平穩性。結果表明:不同形式的齒軌車輛動態特性存在顯著差異,Locher系統齒軌車輛動態特性最佳;同軸Strub系統與雙排齒Abt系統的齒輪嚙合行為較差且受線路不平順影響明顯,齒輪?齒軌嚙合力最大沖擊值達20.3 kN,嚙合中心距誤差達3.73 cm;同軸Strub系統與雙排齒Abt系統車輛安全性較差,雙排齒Abt系統的輪軌垂向力最大達51.7 kN;異軸Strub系統的車輛平穩性最差,最大車體垂向加速度為0.033 m/s2,平穩性指標為1.27。
關鍵詞: 齒軌車輛; 車輛動力學; 齒軌鐵路系統; 齒輪?齒軌嚙合; 動力學性能
中圖分類號: U234;U270.1+1 文獻標志碼: A 文章編號: 1004-4523(2024)09-1564-11
DOI:10.16385/j.cnki.issn.1004-4523.2024.09.013
1 概 述
齒軌鐵路的應用至今已經有了100多年的歷史,近年來,國外有許多新建與改建的齒軌鐵路與傳統鐵路結合在一起,用于交通運輸以及旅游觀光[1?2]。在重慶大足建立的齒軌鐵路首次載人測試已經完成,主要依托都江堰?四姑娘山山地軌道交通項目進行編制的四川省地方標準《山地(齒軌)軌道交通技術規范》已經頒布[3]。現今齒軌鐵路系統形式較多,所配備的齒軌車輛的驅動結構具有多樣性[4],齒軌車輛動態特性也有可能會由此產生一定差異。因此,有必要對不同形式的齒軌車輛進行動態特性分析。目前已知的齒軌鐵路系統形式主要為Marsh,Riggenbach,Abt,Strub,Locher,Margon,Vonroll七種。Marsh,Riggenbach,Margon,Strub,Vonroll齒軌鐵路系統主要差別體現在齒軌鐵路上,而齒軌車輛驅動齒輪均為垂向嚙合單一漸開線齒輪[5],與車輛上固定橫軸鉸接,車輛結構相似,其中Strub應用最為廣泛,又分為驅動齒輪與車軸或構架相連的同軸Strub齒軌車輛和異軸Strub齒軌車輛。此外,Abt齒軌系統為多個齒輪交錯并排連接,實現與下方多個齒條交錯嚙合,Locher齒軌系統為兩個齒輪水平對稱設置,與中間齒軌橫向嚙合。因此本研究選擇對同軸Strub齒軌系統、Abt齒軌系統、異軸Strub齒軌系統以及Locher齒軌系統展開動力學分析,幾種齒軌結構如圖1所示。
齒軌車輛的牽引與制動主要靠齒輪嚙合實現,而對于齒輪嚙合行為相關的研究已經十分成熟,其中蔣建政等[6]基于齒輪嚙合剛度解析計算方法、SIMPACK225號力元以及有限元法建立了三種不同時變嚙合剛度計算模型,對比分析了不同速度工況下的直齒圓柱齒輪的嚙合力以及動態傳遞誤差。Yu等[7]以動態分形齒隙為內激勵建立了包含表面形貌和齒輪中心運動的齒輪動力學模型,分析了齒側間隙對齒輪副的影響。Neusser等[8]基于多體動力學建立了齒輪傳動系統模型,計算了不同齒面的齒輪系統傳動誤差并對結構噪聲進行了預測。陳春俊等[9]以時變嚙合剛度與軌道不平順為激勵,探究了在變載荷作用下機車傳動齒輪的振動特性。夏茂浩等[10]分析了載荷因素與安裝誤差對小模數螺旋錐齒輪嚙合特性的影響。康博強等[11]建立了5自由度彎?扭?軸耦合傳動系統動力學模型,在考慮齒輪齒面摩擦的基礎上對斜齒輪系統展開了動力學特性分析。可以得知齒輪嚙合系統是一個較為復雜的耦合動力學系統,其嚙合行為受傳動結構影響較為顯著。
目前國內外學者主要對齒軌車輛相關領域做出了以下相關研究,陳雙喜等[12]通過SIMPACK軟件建立了單節齒軌車輛動力學模型,對比分析了不同齒輪參數以及驅動方式對山地齒軌車輛動力學特性的影響。張乾等[13]基于有限元理論,建立了齒軌(鋼軌)?軌枕?橋梁?墩臺空間耦合計算模型,分析了在典型荷載作用下的齒軌鐵路軌道?簡支梁橋相互作用,并對軌縫位置提出了建議。Chen等[14]通過建立齒軌車輛耦合動力學模型對比分析了不同電機布置模式下的齒軌車輛動態特性。趙冠闖等[15]分析了轉動慣量以及重心高度對齒軌車輛動力學性能的影響。井國慶等[16]介紹了不同齒軌鐵路系統及其軌下基礎結構,從工藝性以及經濟性上提出了齒軌鐵路系統的選取考慮因素。Seo等[17]設計并通過實驗開發了帶有彈性齒輪的齒軌車輛轉向架,并對其動力學性能進行了評估。索蓓蓓等[18]分析了采煤機齒軌輪和銷軌在不同齒軌輪節距以及中心距工況下的齒軌輪?銷軌嚙合特性。上述研究從多個角度分析了齒軌車輛的齒輪?齒軌嚙合行為以及車輛動態特性,可以證明齒輪嚙合激擾對車輛動態特性有一定影響。
為探究不同形式齒軌車輛的動態特性,首先,本文在解析齒輪?齒軌嚙合激擾產生機理的基礎上,根據齒輪?齒軌嚙合方式建立了齒輪?齒軌嚙合模型;其次,考慮不同形式齒軌車輛的驅動結構以及功能特點,建立了齒軌車輛動力學模型,并對模型進行了實驗對比驗證;然后,采用所建立的模型,計算了不同齒軌系統的齒軌車輛齒輪動態接觸力,探究齒輪?齒軌嚙合系統動態特性,并展開了線路不平順下的齒輪?齒軌嚙合中心距誤差分析;最后,研究了不同齒軌系統齒軌車輛的動態響應,在此基礎上對比分析齒軌車輛的運行安全性與舒適性,并給出了最佳齒軌鐵路系統。
2 齒軌車輛系統模型
本節將簡要闡述齒軌車輛的結構,首先建立了齒輪?齒軌嚙合模型,然后根據驅動齒輪的布置方式建立齒軌車輛模型,并在此基礎上對齒軌車輛進行數學與力學表達,形成齒軌車輛動力學模型。
2.1 齒輪-齒軌嚙合模型
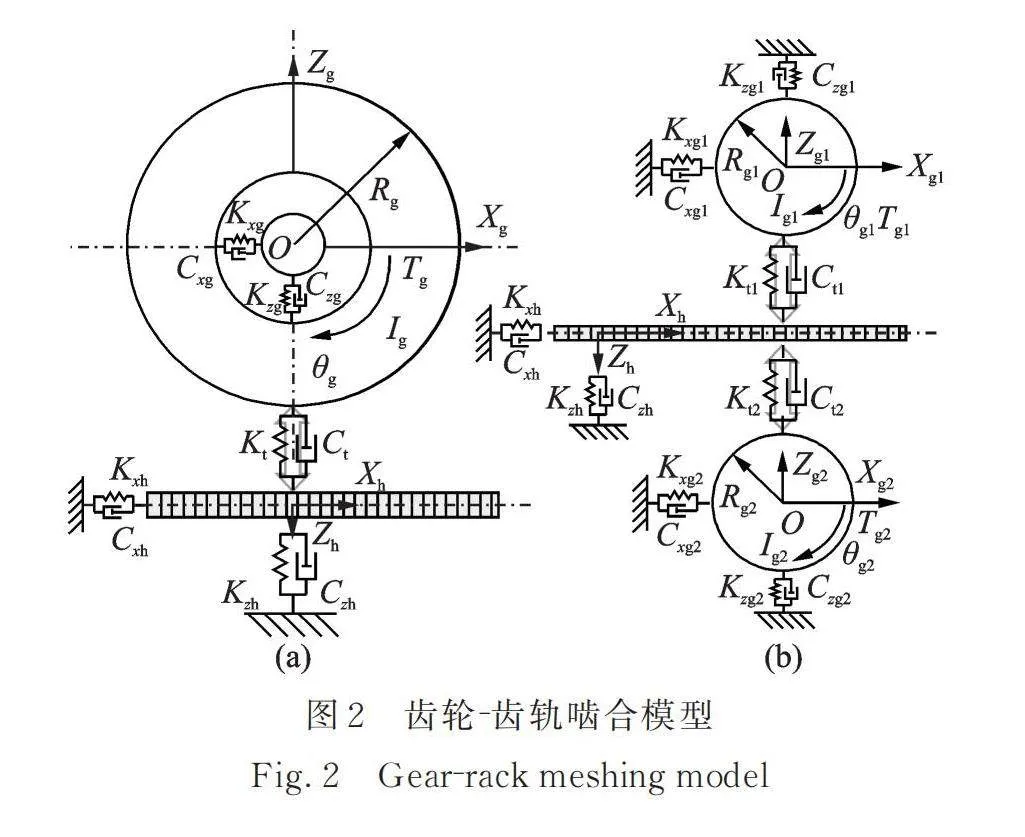
本節通過齒輪動力學,在不考慮齒側間隙等時變因素影響的情況下,根據不同齒軌鐵路系統的齒輪?齒軌嚙合驅動裝置結構和功能特點,將齒輪?齒軌系統進行局部細節簡化,建立兩種Strub系統與雙排齒Abt系統對應的五自由度和Locher系統對應的八自由度齒輪?齒軌嚙合模型,如圖2(a),(b)所示,其中y軸為嚙合線方向。
驅動齒輪以彈性旋轉鉸接的方式安裝在齒軌車輛轉向架零部件上。Ig,Tg,θg分別為驅動齒輪的轉動慣量、轉矩和扭轉角;Kxg與Cxg分別為齒輪與轉向架彈性聯結的縱向剛度和阻尼;Kzg和Czg分別為齒輪與轉向架彈性聯結的垂向(Locher齒軌系統模式下為橫向)剛度和阻尼;為驅動齒輪基圓半徑;Kxh,Cxh,Kzh,Czh分別為齒軌與軌道板的縱向和垂向扣件剛度和阻尼。Kt,Ct分別為傳動系統的嚙合剛度與嚙合阻尼:
(1)
式中 δg,δh分別為驅動齒輪與齒軌彈性變形量;Kg,Kh分別為驅動齒輪與齒軌單齒剛度;εg為輪齒嚙合的阻尼比。
根據牛頓運動定律建立動力學微分方程如下:
驅動齒輪運動方程為:
(2)
(3)
(4)
五自由度齒條運動方程為:
(5)
(6)
八自由度齒條運動方程為:
(7)
(8)
式中 Zg,Xg分別為驅動齒輪在垂向與縱向上的位移;Zh,Xh分別為驅動齒軌垂向與縱向的位移;rbg為驅動齒輪的基圓半徑;Fdpi,Ffpi分別為齒輪?齒軌嚙合的動態接觸力與動態摩擦力;為驅動齒輪質量;為齒軌質量。
此外,齒輪?齒軌嚙合受線路激勵以及轉向架自身振動等誤差激勵的影響,使得驅動齒輪在進入和退出嚙合時,嚙入嚙出點的位置偏離理論嚙合點,產生嚙合誤差[19],由此產生嚙入沖擊。
(9)
式中 Tz為理論嚙入時間,Tz=2π/(z1ω1),z1為驅動齒輪齒數,ω1為驅動齒輪轉動角速度;t0為實際的嚙入時間。
一般情況下,Δt約為Tz的5%~10%,可得出任意t時刻的嚙入沖擊力:
(10)
式中 為后一輪齒進入嚙合前,前一輪齒的動態接觸力;K1(t*),K2(t*)分別為驅動齒輪與齒軌在t*時刻嚙合點的齒節剛度;Δφ為驅動齒輪因嚙入點的變化引起的嚙合角的變化量;Δγ為在相應情況下驅動齒輪與齒軌嚙合角度變化量之和。
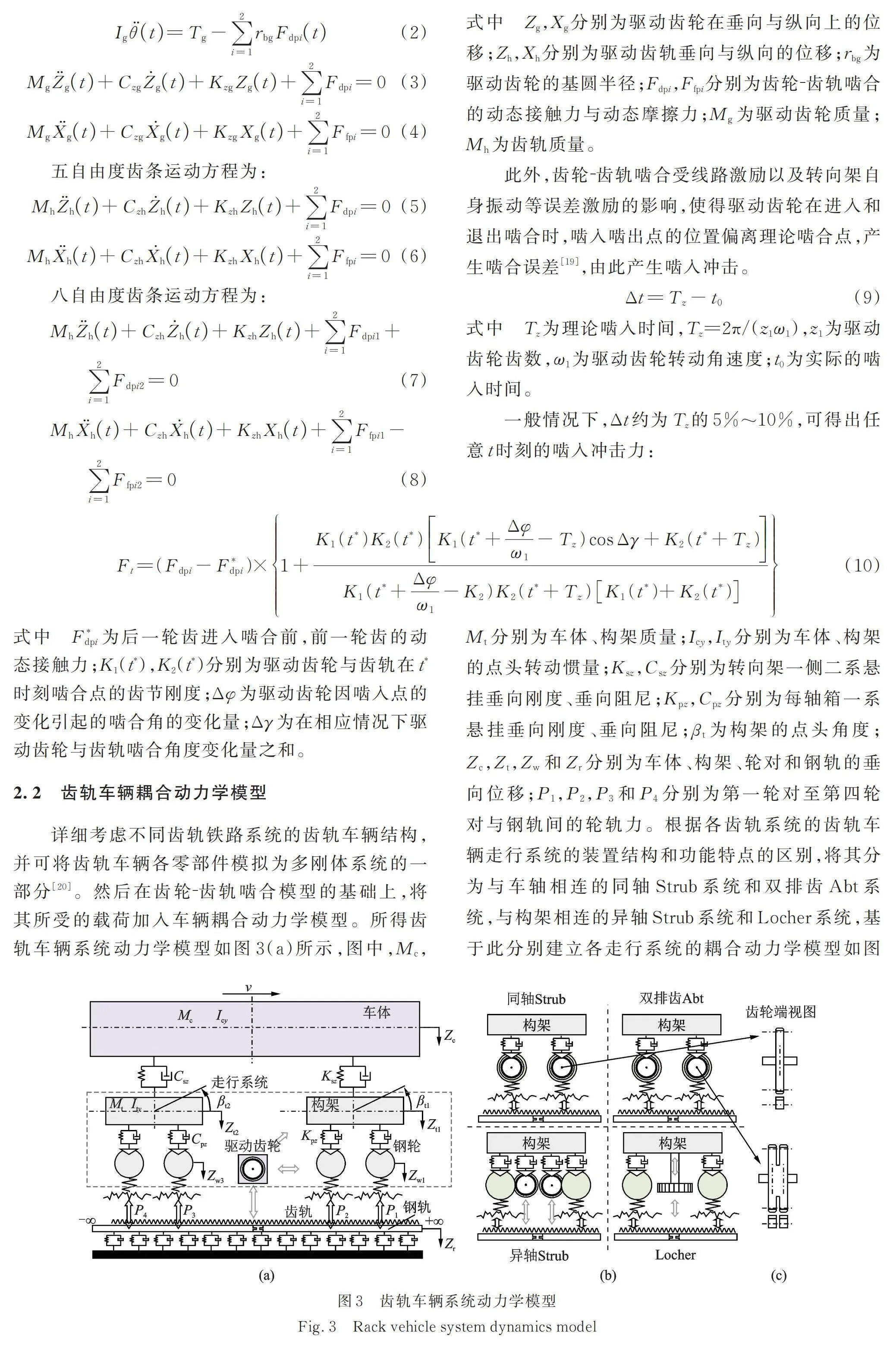
2.2 齒軌車輛耦合動力學模型
詳細考慮不同齒軌鐵路系統的齒軌車輛結構,并可將齒軌車輛各零部件模擬為多剛體系統的一部分[20]。然后在齒輪?齒軌嚙合模型的基礎上,將其所受的載荷加入車輛耦合動力學模型。所得齒軌車輛系統動力學模型如圖3(a)所示,圖中,,分別為車體、構架質量;,分別為車體、構架的點頭轉動慣量;,分別為轉向架一側二系懸掛垂向剛度、垂向阻尼;,分別為每軸箱一系懸掛垂向剛度、垂向阻尼;為構架的點頭角度;,,和分別為車體、構架、輪對和鋼軌的垂向位移;,,和分別為第一輪對至第四輪對與鋼軌間的輪軌力。根據各齒軌系統的齒軌車輛走行系統的裝置結構和功能特點的區別,將其分為與車軸相連的同軸Strub系統和雙排齒Abt系統,與構架相連的異軸Strub系統和Locher系統,基于此分別建立各走行系統的耦合動力學模型如圖3(b)所示。圖3(c)為同軸Strub與雙排齒Abt系統走行部的齒輪?齒軌嚙合部分模型端視圖,其中同軸Strub為單一漸開線齒輪齒條,而雙排齒Abt系統齒輪結構由兩排齒盤交錯排列,齒軌結構由兩根實心齒條并排組成,錯動量與齒輪保持一致。模型自由度為47,如表1所示。
根據圖2和表1可以看出,齒軌車輛動力學模型與傳統客車的主要區別體現在走行系統部分,其中同軸Strub系統、雙排齒Abt系統差異表現在輪對運動方程上,異軸Strub系統、Locher系統差異表現在構架運動方程上,其余各部件運動方程一致。因此依據達朗貝爾原理對與傳統客車相差異的各部件建立運動微分方程。
2.2.1 同軸Strub系統、雙排齒Abt系統輪對運動方程(i=1~4)
垂向運動:
(11)
橫向運動:
(12)
側滾運動:
(13)
搖頭運動:
(14)
點頭運動:
(15)
式中 Mw為輪對質量;Ywi為輪對橫向位移;FxfLi和FxfRi分別為一系懸掛左、右縱向力;FyfLi和FyfRi分別為一系懸掛左、右橫向力;FzfLi和FzfRi分別為一系懸掛左、右垂向力;Iwx,Iwy和Iwz分別為輪對側滾、點頭、搖頭轉動慣量;Igx,Igz分別為驅動齒輪側滾、搖頭轉動慣量;?wi,βwi和ψwi分別為輪對側滾、點頭、搖頭角度;MLzi和MRzi分別為第i輪對左輪、右輪所受蠕滑力矩在z軸上的分量;MLyi和MRyi分別為第i輪對左輪、右輪所受蠕滑力矩在y軸上的分量;FLxi,FRxi,FLyi,FRyi,FLzi,FRzi分別為第i輪對左、右輪所受蠕滑力在x軸、y軸和z軸上的分量;NLxi,NRxi,NLyi,NRyi,NLzi,NRzi分別為第i輪對左、右輪所受法向力在x軸、y軸和z軸上的分量;?sewi,Rwi分別為軌道線路的超高角、曲率半徑;r0為車輪的名義滾動圓半徑;a0為左右輪接觸點定距的一半;Fgz和Fgy為驅動齒輪傳遞到車軸上沿z軸和y軸方向的力; v為車輛運行速度;g為重力加速度;Ω為輪對的名義滾動圓角度;rLi,rRi分別為第i對輪對左、右輪的滾動半徑;dw為一系懸掛橫向距離的一半。
2.2.2 異軸Strub系統構架運動方程(i=1,2)
垂向運動:
(16)
橫向運動:
(17)
側滾運動:
(18)
搖頭運動:
(19)
點頭運動:
(20)
2.2.3 Locher系統構架運動方程(i=1,2)
垂向運動:
(21)
橫向運動:
(22)
側滾運動:
(23)
搖動運動:
(24)
點頭運動:
(25)
式中 Yti為構架橫向位移;FxtLi和FxtRi分別為二系懸掛左、右縱向力;FytLi和FytRi分別為二系懸掛左、右橫向力;FztLi和FztRi分別為二系懸掛左、右垂向力;Igy為驅動齒輪點頭轉動慣量;Itx,Itz分別為構架側滾、搖頭轉動慣量;?ti,ψti分別為構架測滾、搖頭角度;Hg為構架質心與驅動齒輪中心的垂向距離;dsc為抗蛇行減振器橫向距離的一半;FxsLi,FxsRi分別為抗蛇形減振器左、右側縱向力;?seti,Rti分別為軌道上第i轉向架中心所對應的外軌超高角、曲率半徑;Htw為構架質心與輪對中心線的垂向距離;HBt為構架質心至二系懸掛下平面的距離;Mri為抗側滾力矩;lt為轉向架輪對定距的一半;ds為二系懸掛橫向距離的一半;FgxL,FgxR,FgyL,FgyR,FgzL與FgzR分別為左、右側驅動齒輪沿縱向、橫向以及垂向傳遞到構架上的力; Hg為構架質心與驅動齒輪中心的垂向距離;lg為前后驅動齒輪縱向距離的一半;dg為左右驅動齒輪橫向距離的一半。
2.2.4 車體等各部件運動方程
齒軌車輛其余部件與傳統客車類似,可以作為多剛體系統來考慮。根據車輛耦合動力學和齒輪動力學可推得齒軌車輛運動方程如下:
(26)
式中 M,C,K分別為整個車輛系統的廣義質量矩陣、廣義阻尼矩陣與廣義剛度矩陣;,,X分別為車輛的廣義加速度、速度、位移矩陣;P為車輛的廣義載荷向量。詳細推導過程及運動方程可參考文獻[21?22]。
2.3 數值積分求解方法
本文建立的四種齒軌系統的齒軌車輛耦合動力學模型是基于多體動力學建立的,這是一個大型復雜的非線性動力學微分方程組。本文為提高運算求解速度,采用翟婉明所提出的新型快速顯式積分法(翟方法)對車輛模型進行求解,詳細計算推導與迭代過程參考文獻[20,23]。
2.4 系統模型驗證
為進一步驗證齒軌車輛模型的準確性,本文于重慶大足某齒軌線路設計并實施了10%坡度Strub齒軌系統齒軌車輛運行實驗測試。針對齒輪接觸力與車體加速度進行了測試,部分實測現場如圖4(a)所示。
將實驗測試與模型計算所得結果進行對比,如圖4(b),(c)所示。可以看出模型計算與實驗測試結果相比,齒輪接觸力與車體加速度的計算結果均要略小于實驗測度結果,但實驗測試結果與模型的計算結果基本接近,因此可以認為模型是準確可行的。
3 工況參數
本節將對不同齒軌系統的齒軌車輛的運行工況與相關參數進行簡要說明。
本文所選取的齒軌鐵路系統為以下三種:Strub,Abt以及Locher齒軌鐵路系統,其中Strub又分為同軸和異軸Strub齒軌系統。
為了更清晰地研究不同驅動系統的齒軌車輛動力學特性,本文只在齒輪嚙合誤差處設置了美國五級譜線路不平順。選擇了幾種工況進行對比分析,具體工況如表2所示。另外,齒軌車輛在傳統列車基礎上增加了齒輪嚙合系統,且各結構尺寸較小[24],其主要車輛參數如表3所示。
4 不同齒軌車輛齒輪-齒軌嚙合行為
本節對四種齒軌系統以20 km/h在100‰的坡度上運行時的齒輪接觸力展開分析,并探究了沖擊較大的Strub系統與Abt系統的振動特性。另外,為確定線路激勵對齒輪?齒條非線性嚙合的影響,分析了美國五級譜線路不平順對齒輪?齒條中心距的影響。
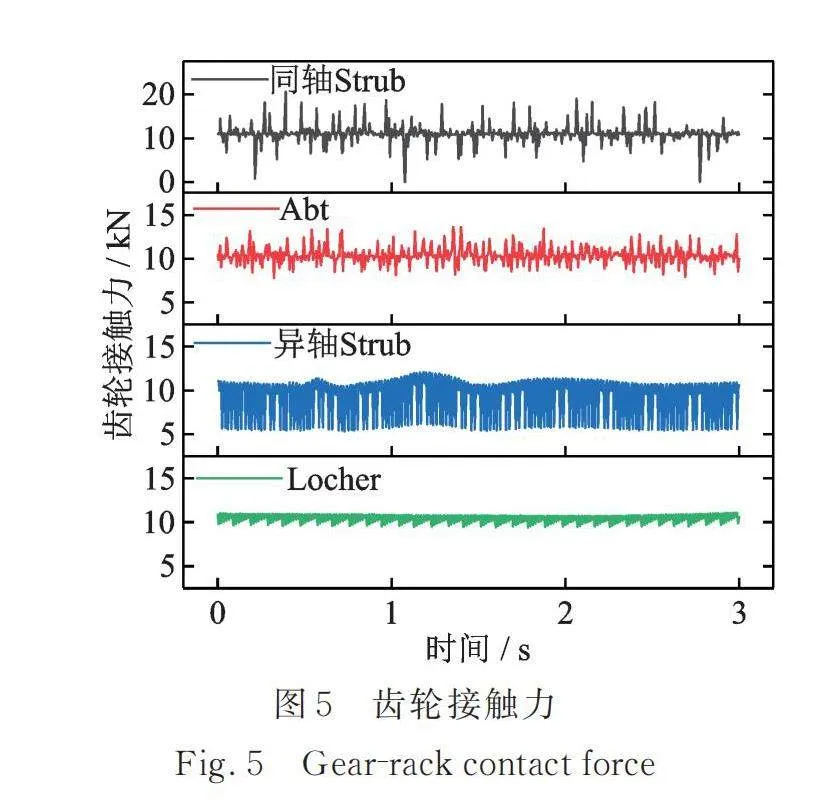
圖5為不同齒軌系統的齒軌車輛以20 km/h在100‰的坡度上運行時驅動齒輪的動態接觸力曲線,圖6和7為在嚙合過程中的齒輪垂向(Locher為橫向)位移和加速度及各自頻域分析曲線。
從圖中可以看出三種垂向嚙合的齒軌系統在嚙合過程中沖擊現象較明顯,其中與車軸相連的同軸Strub系統和雙排齒Abt系統沖擊較大,最大達到20.2 kN。Locher系統齒輪動態接觸力較為平穩,齒輪接觸力保持在11 kN左右。結合圖6與7可以得知Locher系統的驅動齒輪振動現象不明顯,而同軸Strub系統、雙排齒Abt系統與異軸Strub系統驅動齒輪振動規律相似,處于周期運動當中。
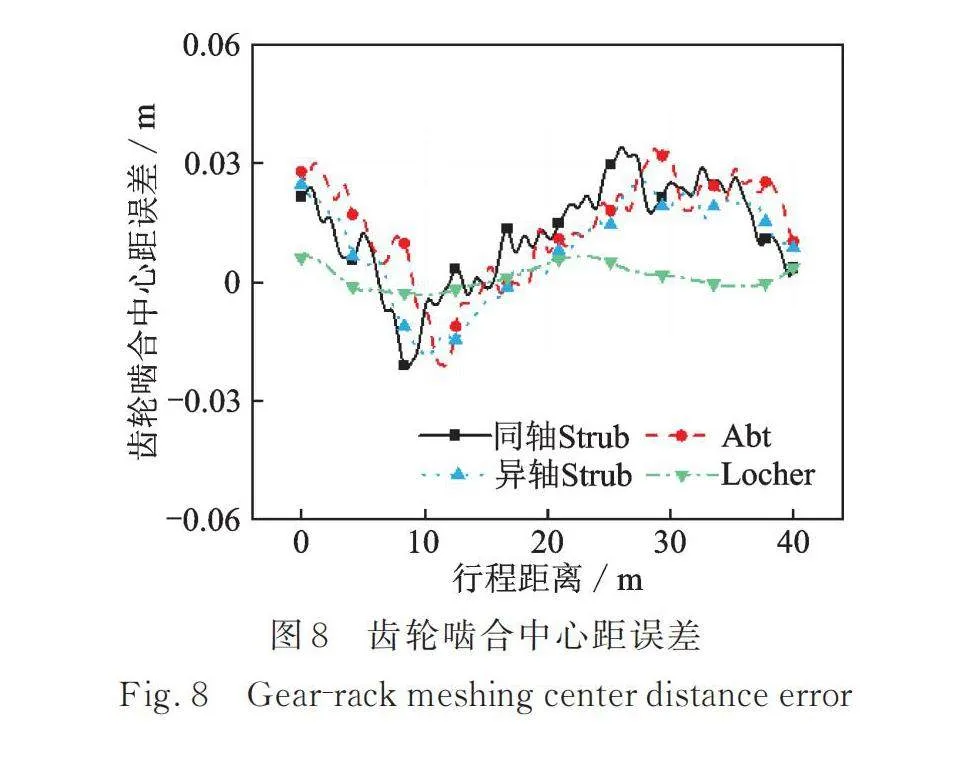
圖8為齒軌車輛在美國五級譜線路不平順的工況下運行時齒輪?齒軌系統的嚙合中心距誤差曲線。可以看出,垂向布置的驅動齒輪受線路不平順影響更加明顯,其中安裝在車軸上的同軸Strub系統與雙排齒Abt系統嚙合中心距誤差更大,最大達到0.0373 m。Locher系統驅動齒輪為橫向布置,其嚙合中心距誤差主要受左右不平順影響,因此嚙合中心距誤差較小。
5 不同齒軌車輛的動態特性
本節在考慮齒輪?齒軌嚙合行為的基礎上,研究四種齒軌系統的齒軌車輛在100‰~200‰坡度坡道上以不同速度運行時的輪軌垂向力和車體加速度,并以輪重減載率與平穩性指標為參考對比分析四種齒軌系統的齒軌車輛動力學性能。
圖9為齒軌車輛以20 km/h運行速度在100‰坡道上行駛時的輪軌垂向力時域曲線以及不同運行速度下的輪軌垂向力最大值。
可以看出Locher系統輪軌垂向力幾乎沒有變化。雙排齒Abt系統的齒軌車輛輪軌垂向力波動較大且存在更多沖擊,最大值為51.7 kN,其次分別為同軸Strub系統、異軸Strub系統,且輪軌垂向力最大值隨速度的增加呈增長趨勢。
圖10為齒軌車輛以20 km/h運行速度在100‰坡度上行駛時的車體垂向加速度及其頻域分析曲線。圖中可以看出異軸Strub系統的車體加速度遠大于另外幾種齒軌系統,最大加速度為16.1 mm/s2,其主要影響頻率為1.92 Hz。
圖11為不同速度下的齒軌車輛在100‰坡道運行時的輪重減載率以及車體垂向平穩性指標。可以看出隨著速度的增加,輪重減載率與平穩性指標逐漸增大。其中同軸Strub系統與雙排齒Abt系統輪重減載率較大,最大值達到0.0131;異軸Strub系統平穩性指標較大,最大為1.27。
圖12為齒軌車輛以20 km/h運行速度在不同坡度坡道上運行時的輪重減載率以及車體垂向平穩性指標。可以看出隨著坡度的增加,輪重減載率與平穩性指標逐漸增大。
可以認為同軸Strub系統與雙排齒Abt系統齒軌車輛安全性較差,而異軸Strub系統齒軌車輛平穩性較差,Locher齒軌系統動力學性能較好。
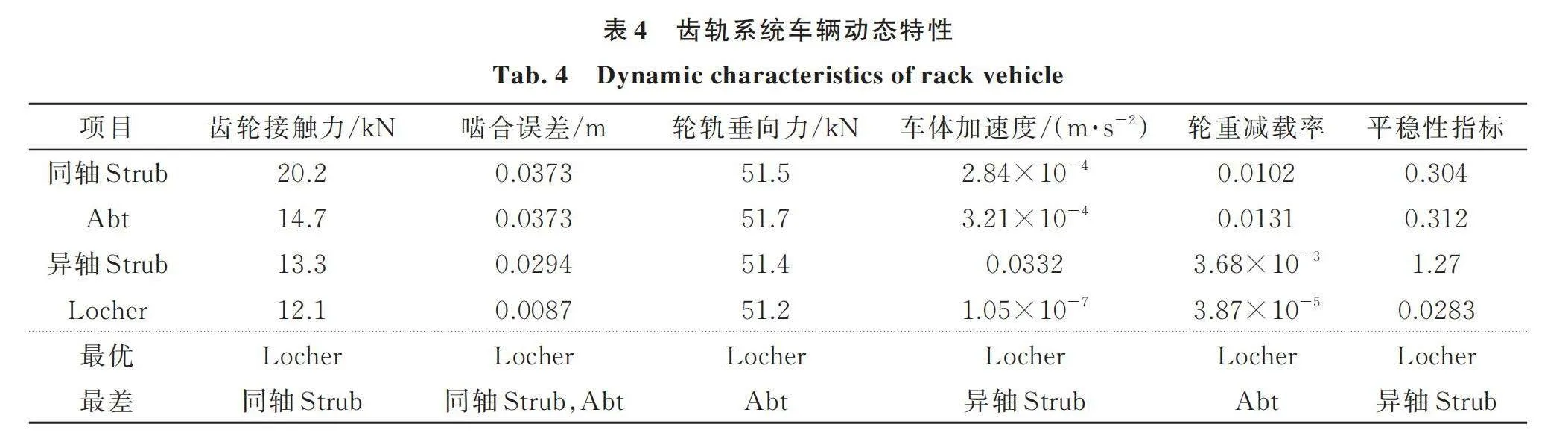
表4為不同齒軌系統的齒軌車輛以不同速度在100‰坡道上運行時的各動態特性指標,并在表格后方列出了各項指標的最優值與最差值所對應的齒軌鐵路系統。通過對比分析可以看出同軸Strub系統與雙排齒Abt系統的齒軌車輛齒輪嚙合特性和運行安全性較差,而異軸Strub系統齒軌車輛運行平穩性較差,Locher系統齒軌車輛動態特性各指標最佳。
6 結 論
本研究針對齒軌系統對車輛動態特性的影響,在解析齒輪?齒軌非線性嚙合激擾的產生機理以及考慮齒輪?齒軌嚙合沖擊的基礎上,建立了齒軌車輛系統耦合動力學模型。研究了爬坡路段下,同軸Strub齒軌系統、Abt雙排齒軌系統、異軸Strub齒軌系統以及Locher齒軌系統驅動的齒軌車輛齒輪?齒軌非線性嚙合行為以及車輛動態響應,并分析了齒軌車輛系統動力學性能。從以上研究中得出以下結論:
(1)該方法對研究不同齒軌鐵路系統齒軌車輛動態特性是有效的,不同齒軌系統的齒軌車輛動態特性有顯著差異。Locher系統的齒軌車輛動態特性最佳。
(2)針對本文所建立模型及采用的方法,同軸Strub系統與雙排齒Abt系統齒軌車輛齒輪?齒軌嚙合特性較差。同軸Strub齒輪接觸力最大值為20.2 kN,線路不平順作用下嚙合誤差達到0.037 m。
(3)針對本文所建立模型及采用的方法,同軸Strub系統與雙排齒Abt系統齒軌車輛運行安全性較差,雙排齒Abt系統輪重減載率最大為0.013;異軸Strub系統的運行平穩性較差,最大車體加速度為0.033 m/s2,平穩性指標為1.27。
參考文獻:
[1]尚勤, 李廉楓, 涂旭. 國外齒軌鐵路技術的發展及運用[J]. 機車電傳動, 2019(2): 9-15.
Shang Qin, Li Lianfeng, Tu Xu. Development and application of foreign cog railways and rack vehicles[J]. Electric Drive for Locomotives, 2019(2): 9-15.
[2]Loomis J, Keske C. The economic value of novel means of ascending high mountain peaks: a travel cost demand model of Pikes Peak cog railway riders, automobile users and hikers, automobile users and hikers[J]. Tourism Economics, 2009, 15(2): 426-436.
[3]蔡向輝, 張乾, 賀天龍. 張家界七星山齒軌鐵路軌道技術研究[J]. 鐵道標準設計, 2020, 64(7): 76-81.
Cai Xianghui, Zhang Qian, He Tianlong. Research on track technology of Qixing Mountain rack railway in Zhangjiajie[J]. Railway Standard Design, 2020, 64(7): 76-81.
[4]余浩偉, 章玉偉, 陳粒. 齒軌鐵路技術特點與應用展望研究[J]. 鐵道工程學報, 2020, 37(10): 6-10.
Yu Haowei, Zhang Yuwei, Chen Li. Research on the technical characteristics and application prospect of the rack railway[J]. Journal of Railway Engineering Society, 2020, 37(10): 6-10.
[5]宋慶偉, 王云朋, 王士強, 等. 山地齒軌鐵路的發展及關鍵技術研究[J]. 機車電傳動, 2022(4): 77-82.
Song Qingwei, Wang Yunpeng, Wang Shiqiang, et al. Research of development and key technologies for mountainous rack railway[J]. Electric Drive for Locomotives, 2022(4): 77-82.
[6]蔣建政, 陳再剛, 翟婉明, 等. 基于不同嚙合剛度計算模型的直齒圓柱齒輪傳動系統動力學特性研究[J]. 中國科學:技術科學, 2018, 48(8): 863-871.
Jiang Jianzheng, Chen Zaigang, Zhai Wanming, et al. Study on dynamic characteristics of spur gear transmission system based on different calculation models of time-varying mesh stiffness[J]. Scientia Sinica Technologica, 2018, 48(8): 863-871.
[7]Yu X, Sun Y Y, Li H G, et al. Nonlinear characteristics of gear pair considering fractal surface dynamic contact as internal excitation[J]. International Journal of Non-Linear Mechanics, 2022, 143: 104027.
[8]Neusser Z, Sopouch M, Schaffner T, et al. Multi-body dynamics based gear mesh models for prediction of gear dynamics and transmission error?[C]//SAE World Congress & Exhibition. Detroit, MI, USA, 2010.
[9]陳春俊, 張振, 劉廣. 軌道不平順激擾下機車傳動齒輪振動特性研究[J]. 中國測試, 2020, 46(6): 108-115.
Chen Chunjun, Zhang Zhen, Liu Guang. Research on vibration characteristics of locomotive transmission gear under track irregularity[J]. China Measurement and Test, 2020, 46(6): 108-115.
[10]夏茂浩, 宋朝省, 梁成成, 等. 載荷和安裝誤差對小模數螺旋錐齒輪嚙合特性影響分析[J]. 中南大學學報(自然科學版), 2022, 53(8): 2932-2945.
Xia Maohao, Song Chaosheng, Liang Chengcheng, et al. Influences of load and misalignment on contact characteristics of small-module spiral bevel gear[J]. Journal of Central South University (Natural Science Edition), 2022, 53(8): 2932-2945.
[11]康博強, 茍向鋒. 考慮齒面摩擦的斜齒輪系統建模及動力學特性分析[J]. 機械傳動, 2015, 39(7): 136-140.
Kang Boqiang, Gou Xiangfeng. Modeling and dynamics characteristic analysis of helical gear system with considering tooth surface friction[J]. Journal of Mechanical Transmission, 2015, 39(7): 136-140.
[12]陳雙喜. 基于SIMPACK的一種山地齒軌車動力學分析[J]. 鐵道機車車輛, 2022, 42(4): 74-79.
Chen Shuangxi. Dynamics analysis of a mountain rack-rail train based on SIMPACK[J]. Railway Locomotive and Car, 2022, 42(4): 74-79.
[13]張乾, 蔡小培, 蔡向輝, 等. 齒軌鐵路軌道-簡支梁橋相互作用及軌縫合理位置研究[J]. 工程力學, 2021, 38(3): 248-256.
Zhang Qian, Cai Xiaopei, Cai Xianghui, et al. Research on simply supported beam-track interaction and reasonable gap position of rack railway[J]. Engineering Mechanics, 2021, 38(3): 248-256.
[14]Chen Z W, Li S H. Dynamic evaluation and optimization of layout mode of traction motor in rack vehicle[J]. Nonlinear Dynamics, 2021, 106: 3025-3050.
[15]趙冠闖, 馮濟橋, 丁軍君, 等. 車體重心高度和轉動慣量對齒軌車輛動力學性能的影響[J]. 鐵道標準設計, 2021, 65(9): 181-186.
Zhao Guanchuang, Feng Jiqiao, Ding Junjun, et al. Influence of height of gravity center and moment of inertia on vehicle dynamic performance[J]. Railway Standard Design, 2021, 65(9): 181-186.
[16]井國慶, 杜文博, 蔡向輝, 等. 齒軌鐵路齒軌系統及軌下基礎研究[J]. 中國鐵路, 2021(3): 94-100.
Jing Guoqing, Du Wenbo, Cai Xianghui, et al. Track structure system and stress of rack railway[J]. China Railway, 2021(3): 94-100.
[17]Seo S, Mun H S, Suk M E, et al. Development of a bogie for running on a track having a steep gradient and sharp curves[J]. Proceedings of the Institution of Mechanical Engineers, Part F: Journal of Rail and Rapid Transit, 2018, 232(4): 1121-1134.
[18]索蓓蓓. 國產采煤機行走機構齒軌輪不同工況下的嚙合特性研究[J]. 煤礦機械, 2017, 38(8): 47-49.
Suo Beibei. Domestic coal-cutter pin gear characteristics under different working condition[J]. Coal Mine Machinery, 2017, 38(8): 47-49.
[19]王建軍, 李潤方. 齒輪系統動力學的理論體系[J]. 中國機械工程, 1998, 9(12): 55-58.
Wang Jianjun, Li Runfang. The theoretical system of the gear vibration theory[J]. China Mechanical Engineering, 1998, 9(12): 55-58.
[20]翟婉明. 車輛-軌道垂向系統的統一模型及其耦合動力學原理[J]. 鐵道學報, 1992, 14(3): 10-21.
Zhai Wanming. The vertical model of vehicle-track system and its coupling dynamics[J]. Journal of the China Railway Society, 1992, 14(3): 10-21.
[21]Chen Z W, Fang H. An alternative solution of train-track dynamic interaction[J]. Shock and Vibration, 2019, 2019: 1859261.
[22]Chen Z W. Dynamic contact between CRTS Ⅱ slab track and bridge due to time-dependent effect of bridge and its influence on train-track-bridge interaction[J]. Engineering Structures, 2021, 234: 111974.
[23]翟婉明. 車輛-軌道耦合動力學[M]. 4版. 北京: 科學出版社, 2015: 11-20.
Zhai Wanming. Vehicle-Track Coupled Dynamics[M]. 4th edition. Beijing: Science Press, 2015: 11-20.
[24]黃志相, 余浩偉, 李濤. 山地旅游景區齒軌鐵路總體設計研究[J]. 鐵道勘察, 2021, 47(1): 64-67.
Huang Zhixiang, Yu Haowei, Li Tao. Research on overall design of rack railway in mountain scenic area[J]. Railway Investigation and Surveying, 2021, 47(1): 64-67.
Dynamic characteristics of different rack vehicles
CHEN Zhao-wei1, YUAN Mi-ao1, LI Shi-hui1, YI Hong-yu1, YANG Ji-zhong2, CHEN Zhi-hui2
(1.School of Mechanotronics and Vehicle Engineering, Chongqing Jiaotong University, Chongqing 400074, China; 2.Science and Technology Research Institute, China Railway Eryuan Engineering Group Co., Ltd., Chengdu 610036, China)
Abstract: In order to improve the climbing ability of rack vehicles, the gear-rack system is added to the traditional rail vehicles. Aiming at the problem that there are many kinds of gear-rack systems in the world at present, and the diversity of gear-rack systems equipped with them leading to the dynamic characteristics difference of rack vehicles, this paper considers the impact of gear-rack meshing on the basis of analyzing the generation mechanism of gear-rack meshing excitation, the rack vehicle coupled dynamic models with two kinds of Strub system, double row teeth Abt system and Locher system are established, and experimental verification on the model are carried out; Based on the model, the gear-rack meshing behavior of rack vehicle running at different speeds on the engagement section of the ramp is analyzed, and the influence of track irregularities on the gear-rack meshing center distance error is explored; On this basis, the wheel/rail action and car body acceleration of the rack vehicle are studied, and the rack vehicle safety are analyzed as well as stabitity. The results show that there are significant differences in the dynamic characteristics of rack vehicles with different gear-rack systems, and the Locher system has the best dynamic characteristics; The gear-rack meshing behavior of coaxial Strub system and double row teeth Abt system is poor and affected by the track irregularity obviously. The maximum impact value of the gear-rack contact force is 20.3 kN, and the meshing center distance error is 3.73 cm; The safety of coaxial Strub system and double row teeth Abt system is poor, and the maximum wheel/rail vertical force of double row teeth Abt system is 51.7 kN; The car body stability of the differential shaft Strub system is the worst. The maximum car body acceleration is 0.033 m/s2, and the stability index is 1.27. The conclusions offer theoretical support for the design, safe operation, and maintenance of mountain rack railways in China.
Key words: rack vehicle;vehicle dynamics;gear-rack system;gear-rack meshing;dynamic characteristics
作者簡介: 陳兆瑋(1988—),男,博士,副教授。E-mail: chenzhaowei_cq@163.com。
通訊作者: 袁密奧(1998—),男,碩士研究生。E-mail: yma14789@foxmail.com。
