基于數字孿生的SCARA機器人工作站在線調試研究
2024-09-30 00:00:00李嬋郭付龍
科技創新與應用 2024年28期



摘 要:由于新時期智能制造飛速發展,傳統制造產業亟待優化升級,生產線的改造又存在著開發周期長、成本高的難題。針對這一關鍵問題,利用數字孿生技術構建SCARA機器人分裝工作站在線調試系統框架,依次通過NX UG搭建數字孿生三維模型,設置物理屬性與控制信息,建立包含PLC程序、機器人程序、視覺模塊等的控制系統,并完成其通信,實現SCARA機器人分裝工作站在線調試。該調試方案證實,在升級生產線引進新的機器人工作站時,應用數字孿生技術進行實施前的優化與驗證,可以降低開發周期與成本。
關鍵詞:數字孿生;SCARA機器人;分裝工作站;在線調試;優化與驗證
中圖分類號:TP23 文獻標志碼:A 文章編號:2095-2945(2024)28-0051-05
Abstract: Due to the rapid development of intelligent manufacturing in the new era, the traditional manufacturing industry is in urgent need of optimization and upgrading, and the transformation of production lines has problems of long development cycles and high costs. Aiming at this key issue, the online debugging system framework of the SCARA robot dispensing workstation is built using digital twin technology. The three-dimensional model of the digital twin model is built through NX UG, physical attributes and control information are set, and control information is established including PLC programs, robot programs, vision modules, etc. The control system, and its communication is completed, realizing the online debugging of the SCARA robot dispensing workstation. This debugging plan confirms that when upgrading the production line and introducing new robot workstations, applying digital twin technology for pre-implementation optimization and verification can reduce development cycles and costs.
Keywords: digital twin; SCARA robot; dispensing workstation; online debugging; optimization and verification
工業機器人經歷幾十年的發展,已經在各個工業領域廣泛應用,成為了制造業生產自動化中的重要一環[1],是衡量一個國家制造業水平和科技水平的重要標志[2],其一直是各國智能制造戰略的研究熱點。工業機器人減輕了工人的勞動強度,提高了生產質量和效率,并快速拉動了宏觀經濟[3]。SCARA(Selective Compliance Assembly Robot Arm)是一種選擇順應性裝配機器手臂,是4自由度(Four degrees of freedom,4-DOF)平面關節型工業機器人,具有結構緊湊、速度快、動作靈活及位置精度高等特點,因此廣泛應用于搬運、裝配等工作場合[4-5]。近年來我國眾為興、李群、新松機器人、臺達埃斯頓和瑞松等企業都推出了較為先進成熟的SCARA機器人[6]。
進入到工業4.0時代,云計算、物聯網、大數據、CPS和人工智能等新一代信息技術將會催生大批生智能工廠,并由規模化生產轉向定制化生產,機器人的需求量持續增加[7-9],同時也要求將工業機器人融合先進智能化技術,推進機器人智能化應用系統,逐漸實現從單個工作站到整個流水線或系統的智能化升級[10]。如何幫助企業快速升級為適用的自動化生產線,并能夠達到節約成本、保證質量、盡快投產的目標,是一個具有挑戰性的關鍵問題。數字孿生技術應運而生,最早由Grieves教授[11]提出,是虛擬空間中對實體產品的鏡像,是與之相對應的物理實體的映射。數字孿生技術是指在數字化的空間當中,經過測量、仿真和數據分析,建立與物理實體一對一的現實映射模型,實現對物理實體運行狀態的實時監測、處理以及預測,并且可以通過腳本等信號指令對物理實體的行為做出調整[12]。數字孿生融合了多特性、多層次、多維度模擬技術[13],能通過創建數字孿生虛擬模型,在實體生產線建造實施之前,通過虛擬環境中仿真驗證,發現設計的不足與缺陷,并進行反復的優化與測試,最終確定最優版本后進行現場實施。因此,其在縮短設備開發周期,提高設計開發效率,減少加工、安裝、調試成本等方面起到了積極的作用。
本文運用數字孿生技術,搭建SCARA機器人分裝工作站在線調試系統框架,建立其數字模型,通過賦予模型機械、物理屬性,與控制系統交互等方法開展工作站運行過程的邏輯性、可靠性仿真及分析,進而提高系統設計的效率。
1 SCARA機器人分裝工作站
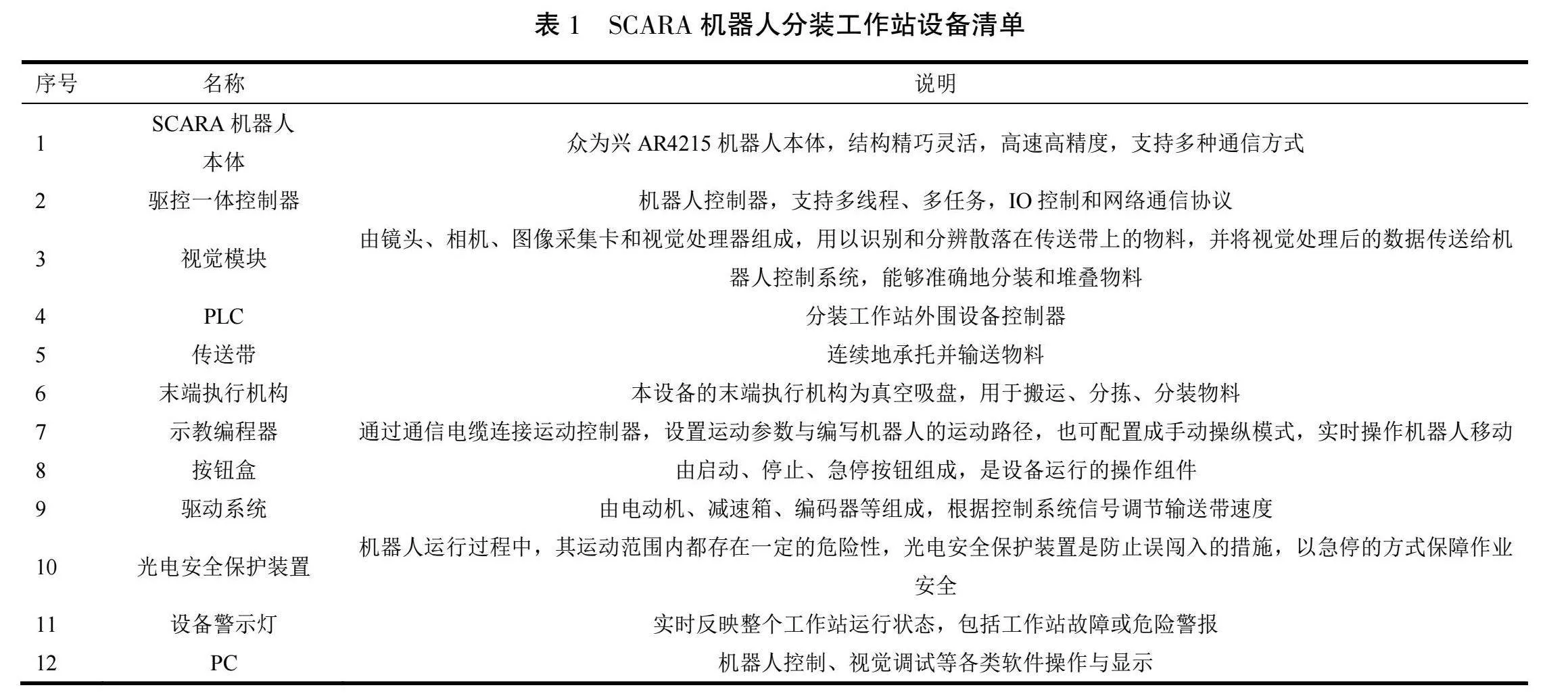
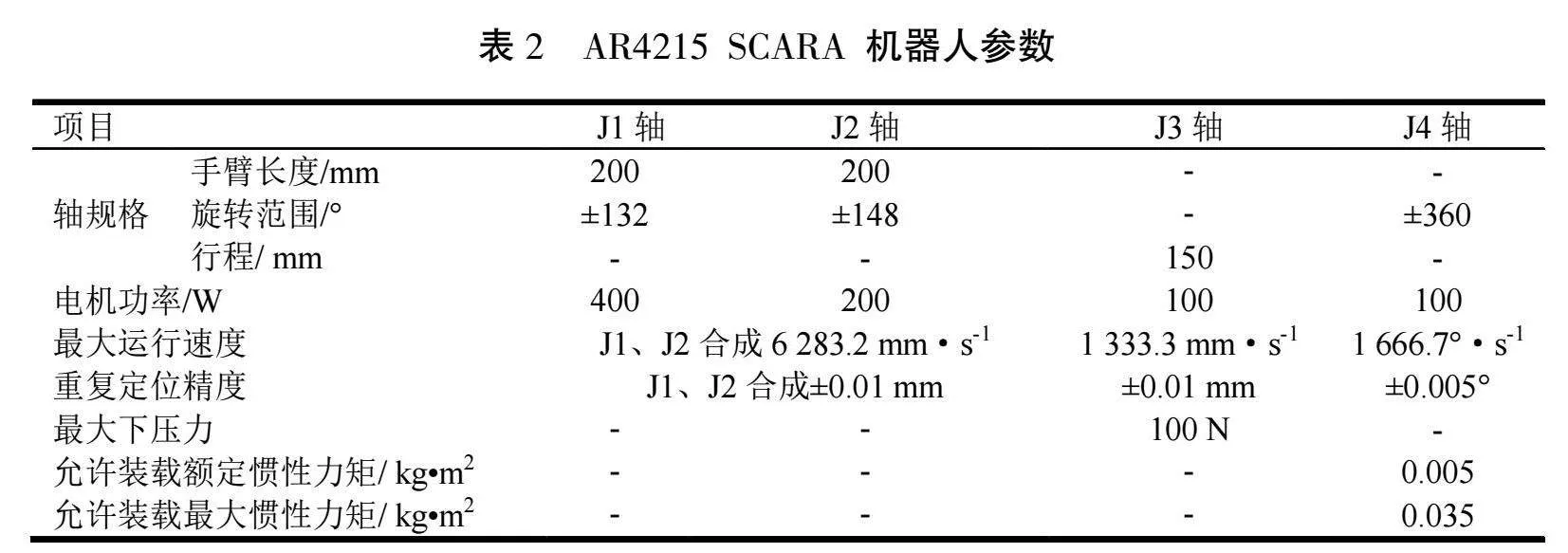
本文的研究對象SCARA機器人分裝工作站由眾為興AR4215機器人本體及其外圍設備組成,實現物料的分裝工作(將50個物料包裝成一箱),如圖1所示,詳細設備清單見表1,機器人的具體參數見表2。
2 SCARA機器人分裝工作站數字孿生系統框架
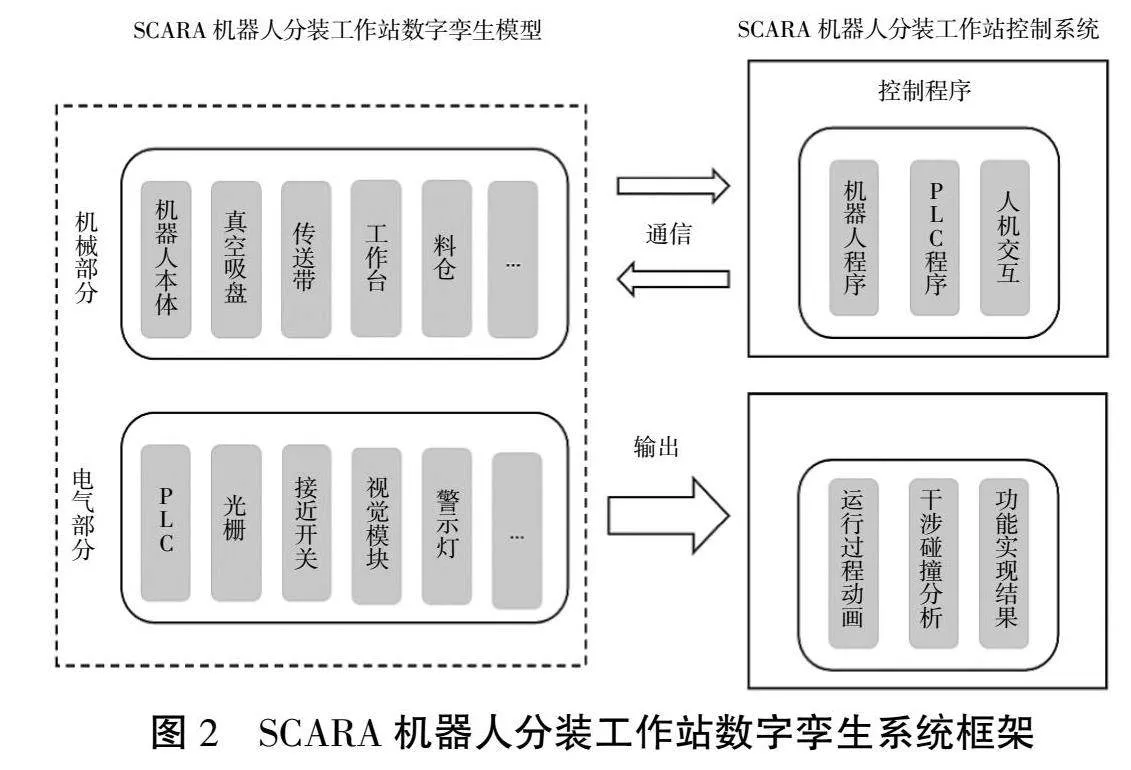
SCARA機器人分裝工作站的數字孿生系統包括數字孿生模型和控制系統2部分,其框架原理如圖2所示。
數字孿生模型與實際工作站一一對應,包括機械部分和電氣部分。機械部分由SCARA機器人本體、真空吸盤、傳送帶、工作臺和料倉等組成。電氣部分由PLC、光柵、接近開關、視覺模塊和警示燈等組成。控制程序主要包括機器人程序、PLC程序、人機交互等。通過與虛擬控制系統通信,SCARA機器人分裝中數字孿生模型的機械部分和電氣部分,按照控制系統設定的程序,完成機械作業或者電氣反饋。工作人員通過系統的運動過程動畫,進行各部分功能檢查、干涉碰撞分析、可靠性預檢等。
3 SCARA機器人分裝工作站數字孿生系統搭建
3.1 數字孿生模型建立
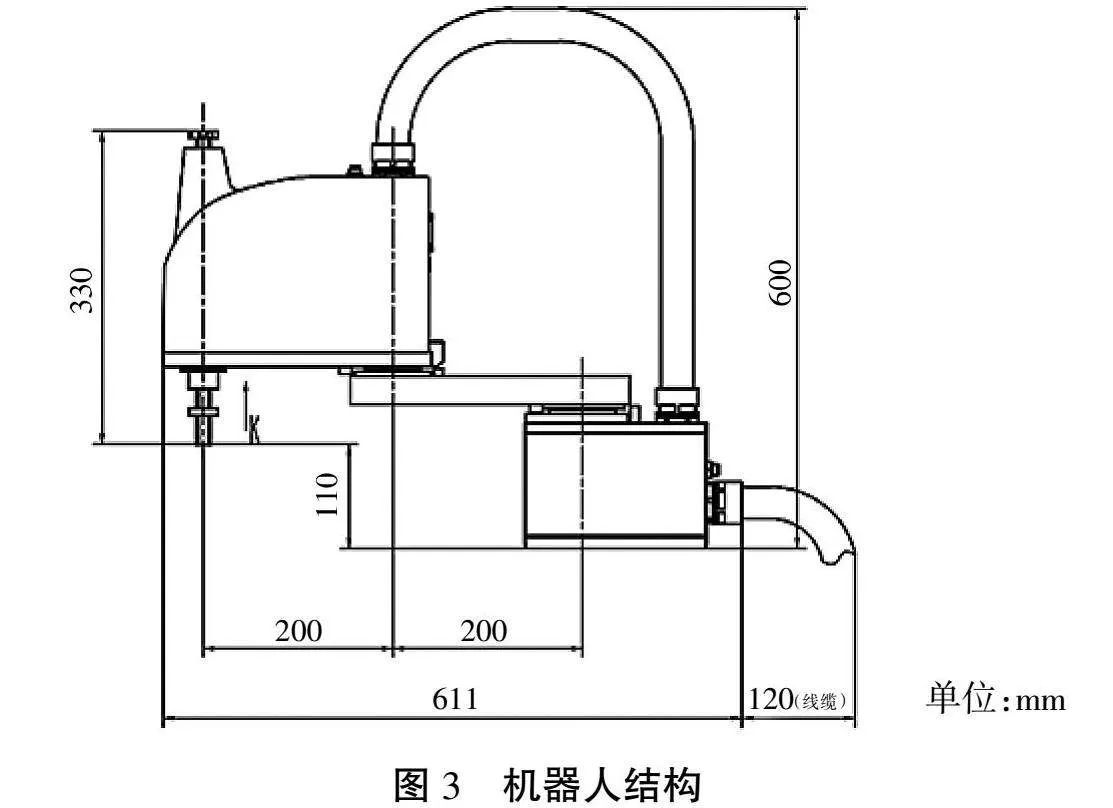
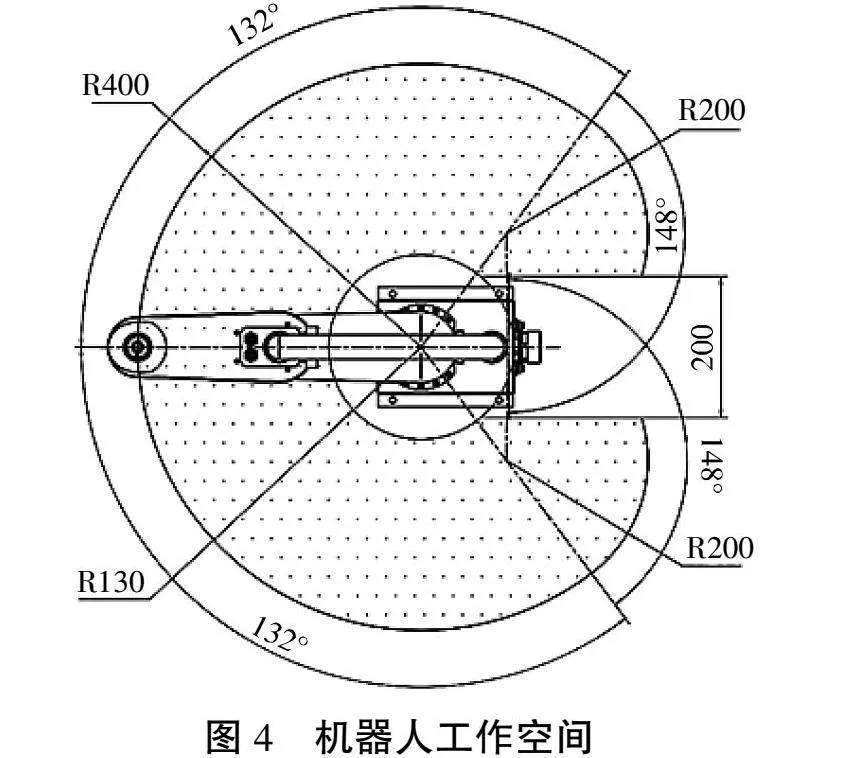
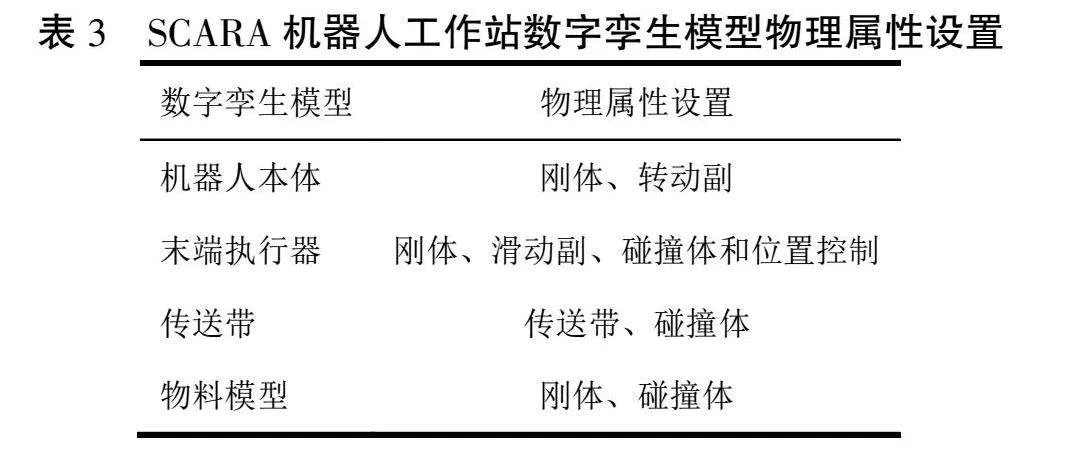
根據AR4215 SCARA機器人的結構(圖3)及運動空間(圖4), 運用NX UG軟件對SCARA機器人工作站進行三維模型建立,如圖5所示為機器人本體部分。為了數字孿生模型的可靠性,在模型簡化時,各關節的長度等關鍵尺寸采用實際1∶1尺寸。通過賦予三維模型物理屬性,包括重力、摩擦、碰撞等,使之與真實物體具有相同的物理性質[14]。對工作站模型設置物理屬性,見表3。
3.2 工作流程設計
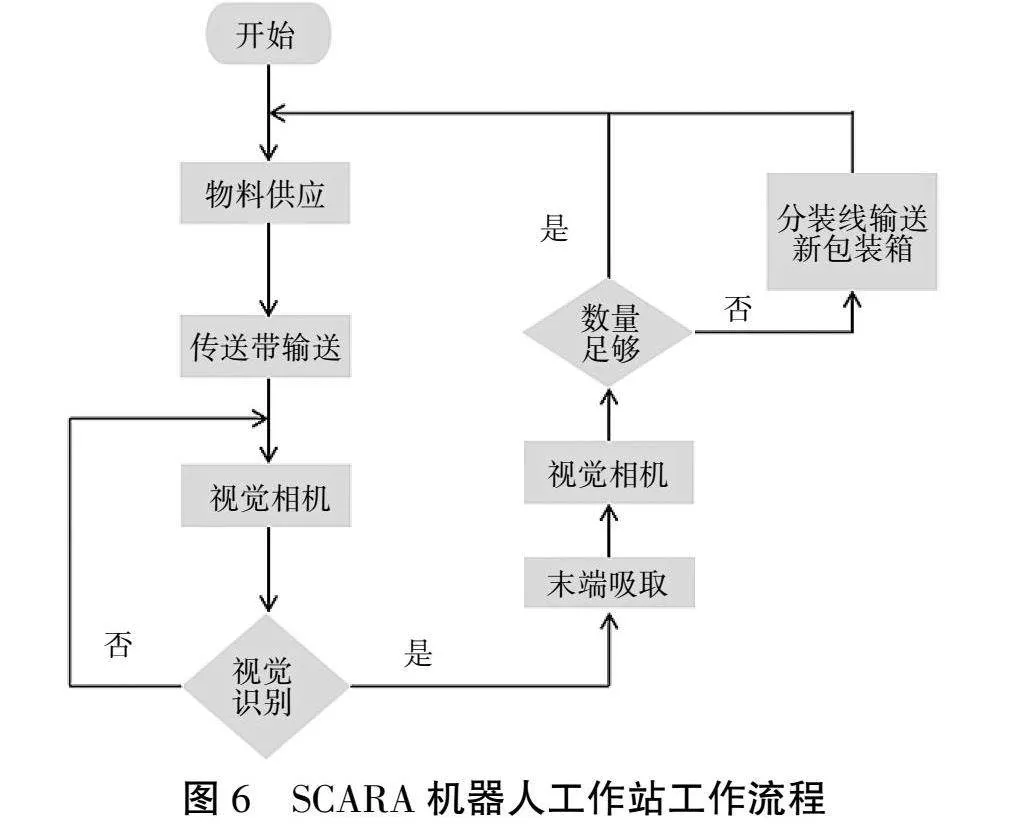
本分裝工作站中的SCARA機器人主要完成對物料的識別、搬運、分裝工作,具體的工作流程如圖6所示。當物料倉有物料,且分裝線準備好包裝箱時,物料倉以一定頻率推出物料到傳送帶,傳送帶勻速帶動物料至視覺相機拍照范圍內。視覺相機拍照后,通過跟視覺庫模板比對,識別出的物料由機器人控制系統指揮末端執行器吸取放置于包裝箱,未識別的物料通過回流的方式送回傳送帶。機器人末端進行分裝作業時,對所分裝物料進行計數,滿足包裝數量要求后,分裝線移動指定距離,輸送新的包裝箱用于下一箱的包裝工作。
3.3 控制系統的搭建
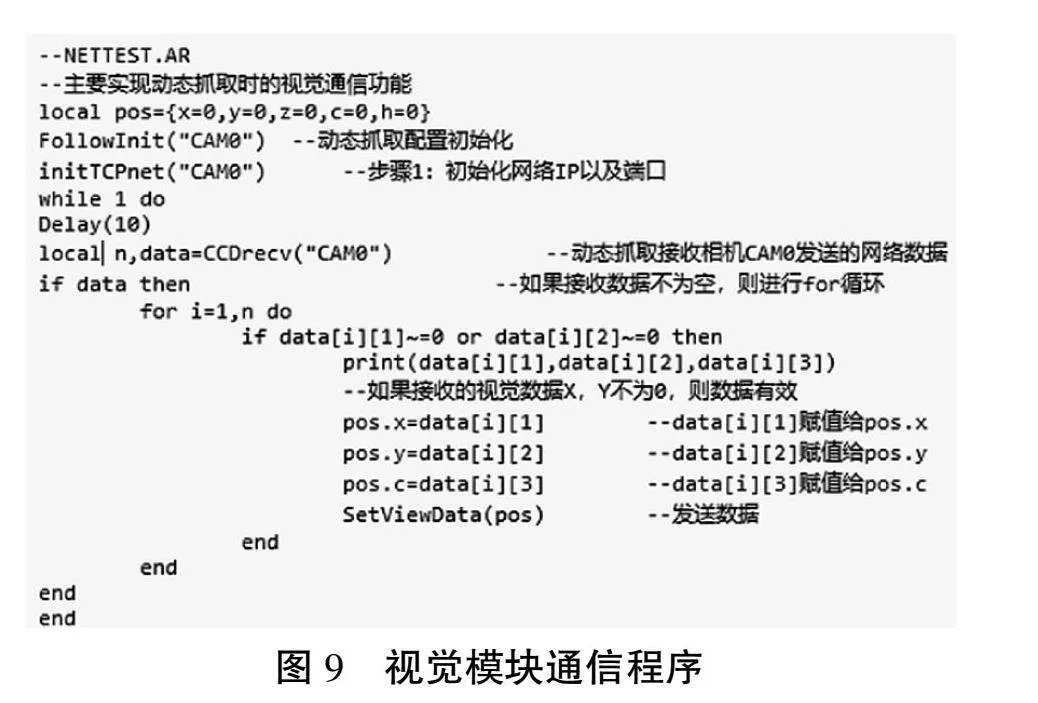
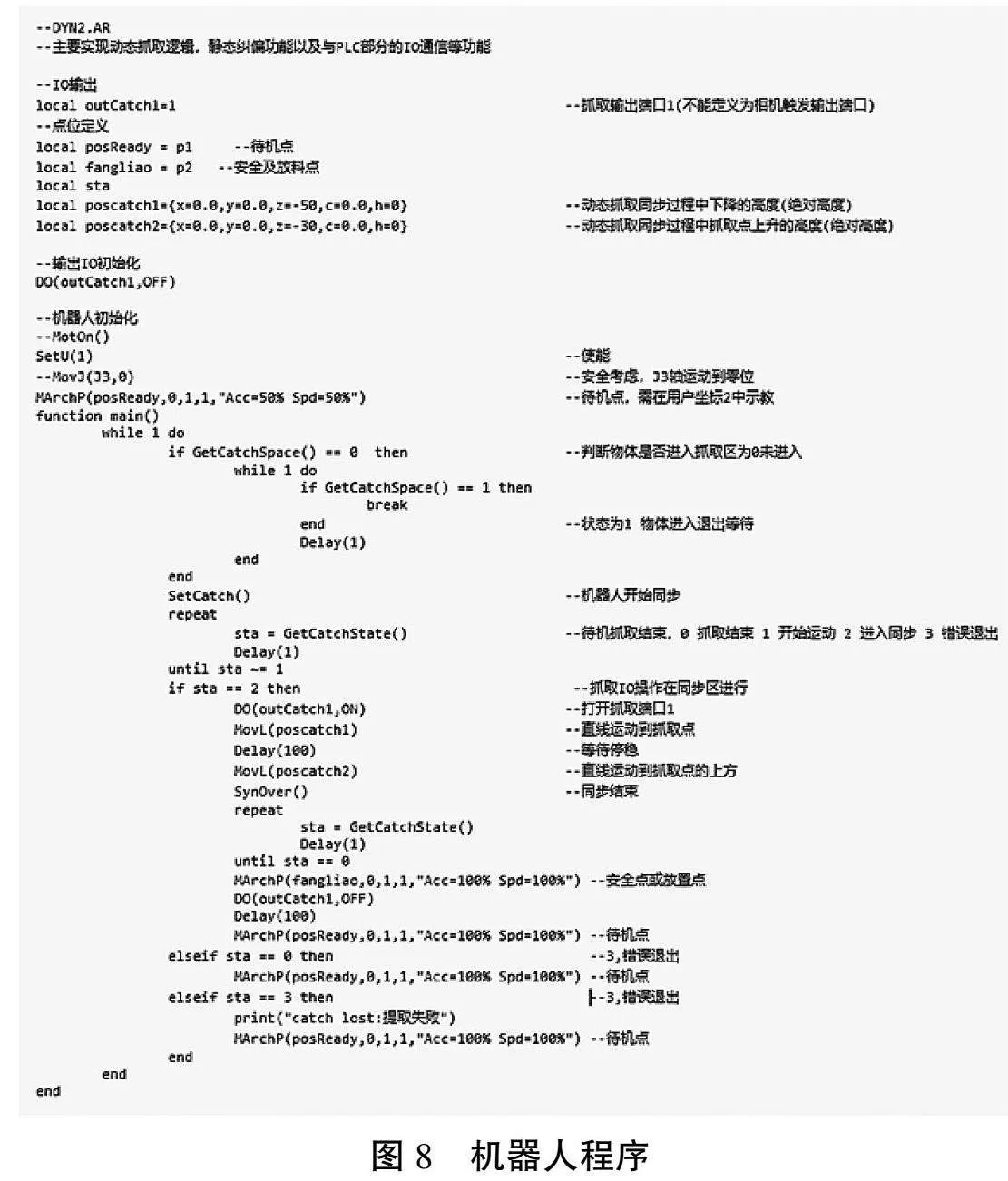
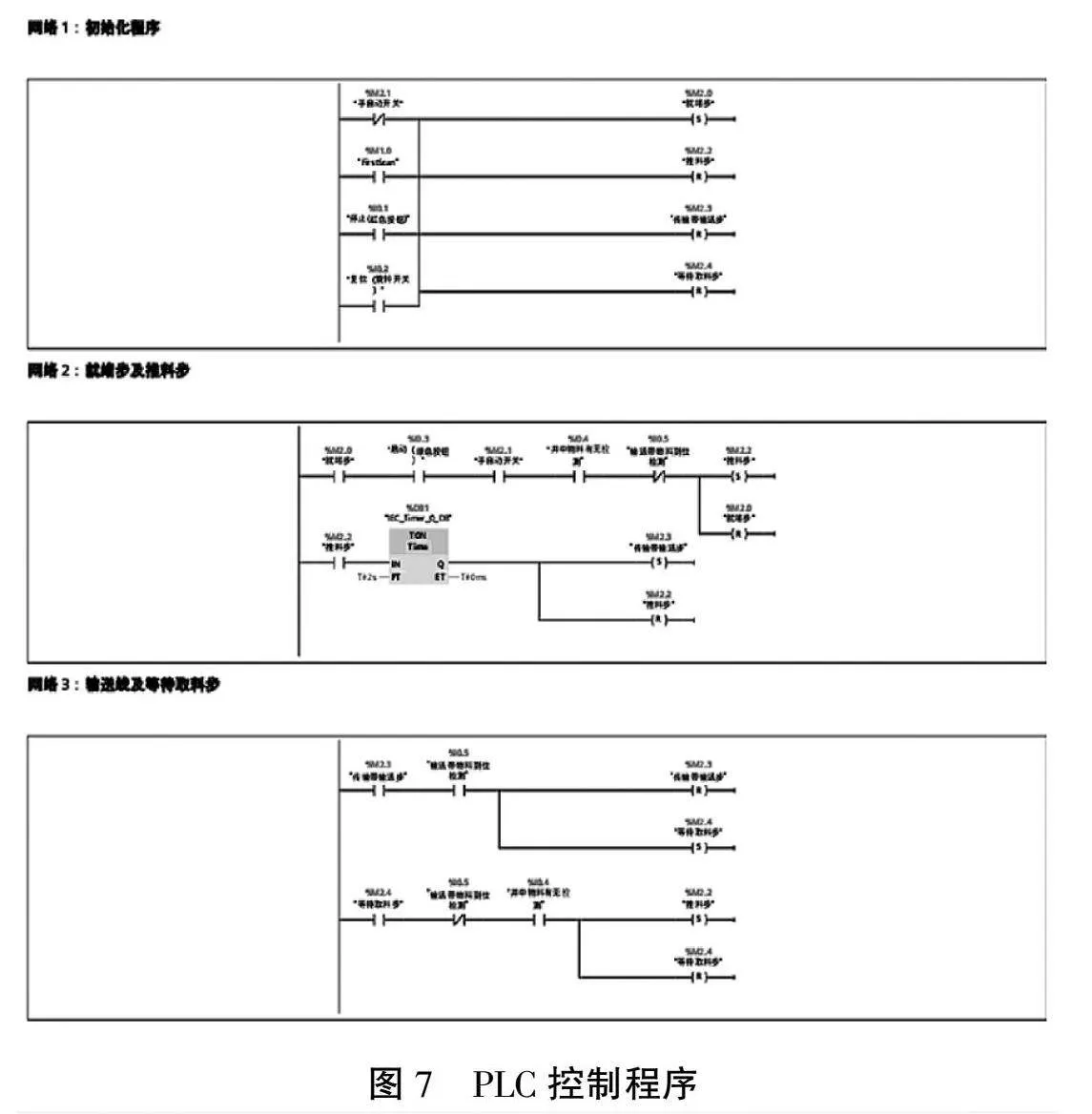
機器人完成分裝工作,除了機械部件可以保證實現某些動作外,還需要控制系統能夠按照合理可行的控制程序,驅動機器人工作站進行可靠有序的運行。因此,搭建機器人分裝工作站的控制系統,包括PLC程序編制、機器人程序編制、數字孿生模型的虛擬I/O端子設置與數據通信等。其中,PLC程序如圖7所示,機器人程序如圖8所示,視覺模塊通信程序如圖9所示。
4 SCARA機器人分裝工作站在線調試
4.1 通信設置
將數字孿生的機械和電氣模型,通過I/O、OPCUA及網絡接口等形式與控制系統相連接,實時處理虛擬對象和真實控制系統的運行行為與狀態,也就是“實控虛”的操作。
4.2 在線調試
根據SCARA機器人工作站的功能要求,對其進行調試,如圖10所示。具體調試內容如下。
1)供料模塊的功能:能否根據輸送帶運行狀況,以一定頻率推出物料,物料供應的節拍能夠根據機器人實際運行狀態調整。
2)輸送線與視覺模塊的匹配性:視覺拍照比對處理的時間間隔到機器人接收信號到吸取動作時間的匹配性,決定了機器人能夠準確吸取物料,并完成搬運和分裝動作。
3)工作站安全保護系統是否完備:通過在線調試檢驗工作站在出現可能危及安全的行為時保護措施的實施效果,可以直觀地、低成本地試錯并驗證解決方案。
5 結束語
本研究在參考大量研究實例的基礎上,運用數字孿生技術,構建了SCARA機器人分裝工作站在線調試系統框架,依次通過NX UG搭建并反復完善數字孿生模型三維模型,設置物理屬性與控制信息,建立包含PLC程序、機器人程序、視覺模塊等的控制系統,通過I/O、OPCUA及網絡接口等形式進行通信,實現了SCARA機器人分裝工作站在線調試。
本文提出的在線調試系統方案可以為工業應用領
域提供參考,尤其是在新生產線建設和傳統生產線智能化升級時,在引進新的機器人工作站時,應用數字孿生技術進行實施前的優化與驗證,可以降低開發周期與成本。這種基于數字孿生的在線調試技術,在自動化設備研發過程中發揮著積極作用,無疑將成為智能制造時代的新趨勢。
參考文獻:
[1] 孟明輝,周傳德,陳禮彬,等.工業機器人的研發及應用綜述[J].上海交通大學學報,2016,50(S1):98-10.
[2] 王田苗,陶永.我國工業機器人技術現狀與產業化發展戰略[J].機械工程學報,2014,50(9):1-13.
[3] 楊光,侯鈺.工業機器人的使用、技術升級與經濟增長[J].中國工業經濟,2020(10):138-156.
[4] 張鐵,李昌達,覃彬彬,等.SCARA機器人的自適應迭代學習軌跡跟蹤控制[J].中國機械工程,2018,29(14):1724-1729.
[5] 楊明,張如昊,張軍,等.SCARA四軸機器人控制系統綜述[J].電氣傳動,2020,50(1):14-23.
[6] 遲潔茹.SCARA機器人的路徑跟蹤混合協調控制研究[D].青島:青島大學,2019.
[7] RUISHU Z, CHANG Z, WEIGANG Z. The status and development of industrial robots[J]. IOP Conference Series: Materials Science and Engineering,2018,423(1).
[8] DOMAE Y. Recent trends in the research of industrial robots and future outlook[J]. Journal of Robotics and Mechatronics, 2019,31(1).
[9] MOHD J, ABID H, PRATAP R S, et al. Substantial capabilities of robotics in enhancing industry 4.0 implementation[J]. Cognitive Robotics,2021,1.
[10] 孫立寧,許輝,王振華,等.工業機器人智能化應用關鍵共性技術綜述[J].振動.測試與診斷,2021,41(2):211-219,406.
[11] GRIEVES M W. Product lifecycle management: the new paradigm for enterprises[J].International Journal of Product Development, 2005, 2(1/2):71.
[12] 嚴興煜,高賜威,陳濤,等.數字孿生虛擬電廠系統框架設計及其實踐展望[J].中國電機工程學報,2023,43(2):604-619.
[13] HAN L. Research on micro-grid power management under decentralized self-regulatory architecture[J]. Mechanical and Electrical Information, 2019 (23): 27-28.
[14] 鄭魁敬,廉磊,郝任義.工業生產線集成控制與虛擬調試研究[J].制造技術與機床,2019(3):128-135.
