基于抗飽和的異步電機調速性能優化
2024-09-26 00:00:00陳秉禎
機電信息 2024年18期


摘要:異步電機的調速控制常采用傳統的PI調速方式,但由于其存在非線性特性,為提高控制性能,建立了異步電機矢量控制的數學模型,提出了一種由抗積分飽和(AW)控制器和擾動觀測器(DOB)復合控制的方法對經典的PI控制進行優化。在優化的PI調節器中,積分項可根據調節器的輸出是否飽和進行單獨控制,可以削弱積分飽和效應,也可以較好地消除系統受到的干擾。實驗結果表明,所設計的控制器可以在提高響應速度的同時,較好地抑制積分飽和現象,提高異步電機調速的性能。
關鍵詞:異步電機;抗飽和;擾動觀測器
中圖分類號:TM343 文獻標志碼:A 文章編號:1671-0797(2024)18-0056-04
DOI:10.19514/j.cnki.cn32-1628/tm.2024.18.014
0 引言
異步電機作為工業生產中的關鍵動力設備,其穩定運行對于保障生產系統的穩定性和可靠性至關重要。異步電機性能優化需要借助先進的電機設計、控制和監測技術,推動電機行業的技術創新和發展。通過研究和應用新型材料、先進控制算法、智能監測系統等技術手段,可以不斷提升異步電機的性能水平。
異步電機具有多變量、非線性、強耦合的特性,矢量控制技術的發展使異步電機的調速性能得到本質提高,異步電機速度控制環引入了PI調節器,這就不可避免地出現了不穩定現象,其主要代表就是積分飽和現象,在速度給定突變時會出現超調量大、響應慢、抗干擾差等不良動態特性[1]。要抑制積分飽和現象,一種有效的方法是設計補償抗積分飽和控制器對PI調節器進行優化,可以使速度響應變快、超調量變小。
文獻[2]提出一種新型抗飽和PI控制器在PWM整流器中的應用,這種新型PI調節器的積分項可以根據調節器的輸出是否飽和進行單獨控制,提高電壓控制環的性能。文獻[3]提出一種具有預測功能的抗積分飽和PI速度控制器,該策略利用PD預測功能,根據其輸出值的符號控制PI控制器的積分方向。
經典的PI調節器抗干擾能力差,為了消除系統的干擾,設計擾動觀測器對系統的干擾進行估計及補償,可以提高系統的抗干擾能力。
文獻[4]提出了一種基于擾動觀測器的非線性系統的前饋控制方法,該方法不依賴被控對象的模型。文獻[5]提出了一種用于電壓源逆變器控制的附加型擾動觀測器,提高了逆變器輸出的抗干擾性能和動態響應速度。文獻[6]提出了一種基于擾動觀測器和有限時間控制的永磁同步電機調速方法,該復合控制具有更好的抗擾動性能和更優越的收斂性能。
為了優化異步電機矢量控制系統性能,本文設計了AW控制器和DOB復合優化的PI調節器,綜合二者的優點,既能減少系統速度響應的時間和超調量,也能提高電機的運行性能。
1 轉子磁場定向矢量控制基本原理
基于抗飽和的異步電機性能優化是針對異步電機在高負載運行時可能出現的飽和現象而提出的一種優化方法。通常情況下,異步電機在高負載條件下,磁通飽和會導致電機性能下降、效率降低、溫升增加,這可能會影響電機的可靠性和使用壽命。因此,基于抗飽和的優化方法旨在減輕或消除這種飽和效應,從而提高電機的性能和效率。
常見的基于抗飽和的異步電機性能優化方法包括:
1)磁通控制:通過控制電機的磁通,可以在高負載情況下避免磁通飽和。這可以通過調整電機的定子電壓、改變電機的勵磁電流或改變電機的轉子設計來實現。
2)電流控制:通過優化電5cdde1fc06fbd8077467d5353fdafcc0機的電流控制策略,減少在高負載條件下的電機磁通飽和。這可能涉及采用先進的控制算法,如矢量控制或直接轉矩控制,以確保電機運行在最佳工作點。
3)優化磁路設計:通過優化電機的磁路設計,可以改善磁通分布,減少磁通飽和的發生。這可能包括改變電機的鐵芯材料、改變定子和轉子的幾何形狀以及優化繞組設計等。
4)磁通觀測與估算:實時觀測和估算電機的磁通狀態,可以幫助控制系統及時采取措施來減輕磁通飽和效應。這可以通過使用傳感器或基于模型的方法來實現。
5)熱管理:有效的熱管理可以幫助減少電機在高負載條件下的溫升,從而減輕磁通飽和效應。這可能包括采用更好的散熱設計、提高繞組的絕緣性能以及優化工作環境等。
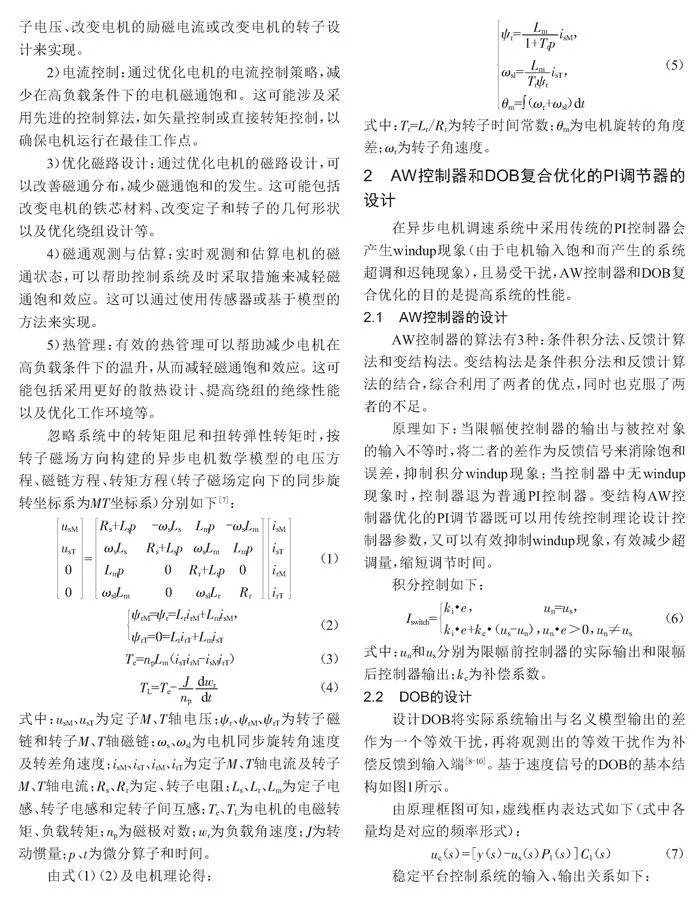
忽略系統中的轉矩阻尼和扭轉彈性轉矩時,按轉子磁場方向構建的異步電機數學模型的電壓方程、磁鏈方程、轉矩方程(轉子磁場定向下的同步旋轉坐標系為MT坐標系)分別如下[7]:
式中:usM、usT為定子M、T軸電壓;ψr、ψrM、ψrT為轉子磁鏈和轉子M、T軸磁鏈;ωs、ωsl為電機同步旋轉角速度及轉差角速度;isM、isT、irM、irT為定子M、T軸電流及轉子M、T軸電流;Rs、Rr為定、轉子電阻;Ls、Lr、Lm為定子電感、轉子電感和定轉子間互感;Te、TL為電機的電磁轉矩、負載轉矩;np為磁極對數;wr為負載角速度;J為轉動慣量;p、t為微分算子和時間。
由式(1)(2)及電機理論得:
2 AW控制器和DOB復合優化的PI調節器的設計
在異步電機調速系統中采用傳統的PI控制器會產生windup現象(由于電機輸入飽和而產生的系統超調和遲鈍現象),且易受干擾,AW控制器和DOB復合優化的目的是提高系統的性能。
2.1 AW控制器的設計
AW控制器的算法有3種:條件積分法、反饋計算法和變結構法。變結構法是條件積分法和反饋計算法的結合,綜合利用了兩者的優點,同時也克服了兩者的不足。
原理如下:當限幅使控制器的輸出與被控對象的輸入不等時,將二者的差作為反饋信號來消除飽和誤差,抑制積分windup現象;當控制器中無windup現象時,控制器退為普通PI控制器。變結構AW控制器優化的PI調節器既可以用傳統控制理論設計控制器參數,又可以有效抑制windup現象,有效減少超調量,縮短調節時間。
積分控制如下:
Iswitch=ki·e, un=us,
ki·e+kc·(us-un),un·e>0,un≠us (6)
式中:un和us分別為限幅前控制器的實際輸出和限幅后控制器輸出;kc為補償系數。
2.2 DOB的設計
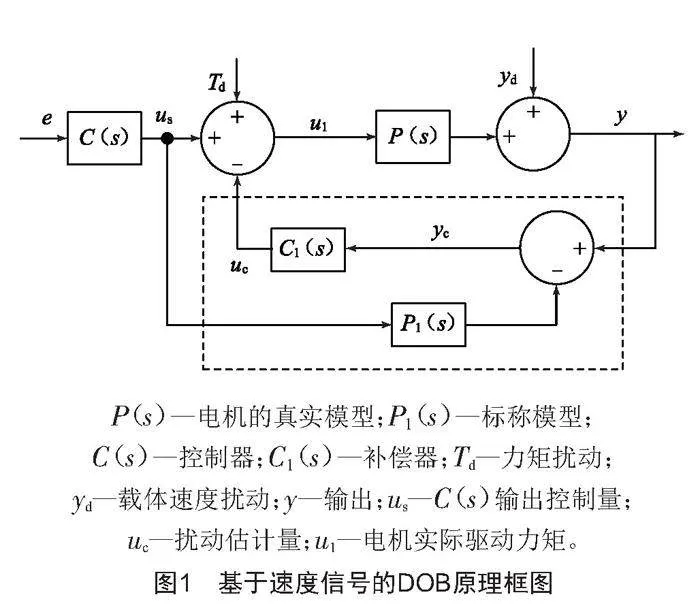
設計DOB將實際系統輸出與名義模型輸出的差作為一個等效干擾,再將觀測出的等效干擾作為補償反饋到輸入端[8-10]。基于速度信號的DOB的基本結構如圖1所示。
由原理框圖可知,虛線框內表達式如下(式中各量均是對應的頻率形式):
uc(s)=[y(s)-us(s)P1(s)]C1(s) (7)
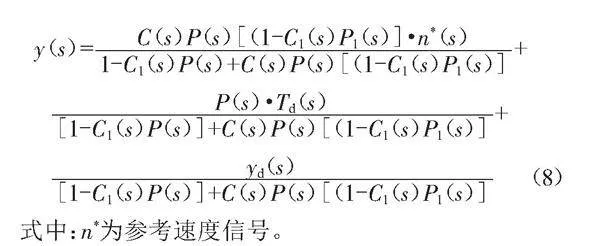
穩定平臺控制系統的輸入、輸出關系如下:
(8)
式中:n*為參考速度信號。
3 實驗驗證與分析
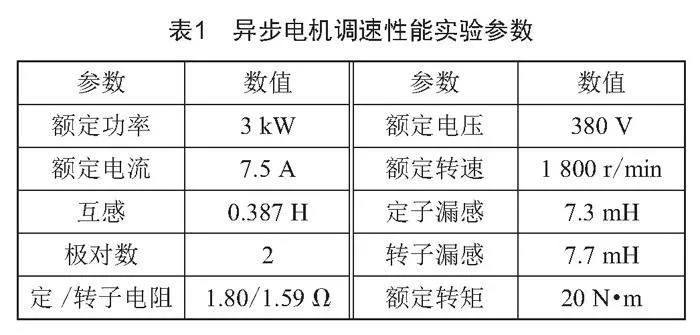
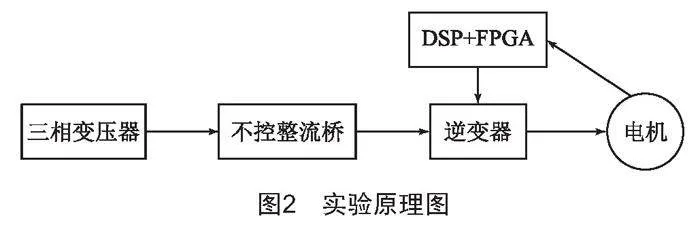
采用基于DSP和FPGA的控制器來進行異步電機矢量調速實驗,交-直-交主電路為:三相自耦調壓器的輸出接到三相不控整流裝置,整流后通過一個電容進行穩壓給逆變器供電,由DSP控制逆變器的驅動信號,逆變輸出的三相交流電和異步電機的三相定子繞組相連,原理圖如圖2所示。電機具體參數如表1所示。
當采用傳統PI調節器時,速度響應具有很大的超調量,達到60%,系統需要7.5 s達到穩定,穩定性差且抗干擾能力弱,如圖3所示;當采用AW控制器和DOB復合優化的PI調節器時,參考轉速得到完美優化,反饋轉速的超調量下降到25%,穩定時間僅需2 s,抗干擾能力較強,如圖4所示。
4 結論
在異步電機矢量控制調速系統中,為抑制積分飽和現象和消除干擾,設計了一種由AW和DOB復合優化的傳統PI調節器。實驗表明,該PI調節器能夠減少系統速度響應的超調量,縮短系統穩定的時間,有較強的抗干擾能力。在所設計的PI調節器控制下,異步電機的速度環能實現較好的跟蹤,且跟蹤誤差小,使系統性能得到了優化。所設計的PI調節器可以用于其他應用的閉環控制環節,使用領域廣泛。
[參考文獻]
[1] 苗敬利,李啟蒙.新型Anti-Windup PI控制器在感應電機DTC系統中的應用[J].微特電機,2023,41(12):47-50.
[2] 劉燦,丁學明,唐柱.異步電機矢量控制系統性能優化及仿真分析[J].計算機仿真,2013,30(4):308-312.
[3] 周華偉,溫旭輝,趙峰,等.一種具有預測功能的抗積分飽和器和PI速度控制器[J].電機與控制學報,2012,16(3):15-21.
[4] 李華,陳良.非線性系統的線性定常擾動觀測器前饋控制[J].控制工程,2013,20(6):1037-1041.
[5] 程麗敏,李興源.基于擾動觀測器的電壓源型逆變器控制[J].電工技術學報,2011,26(8):113-118.
[6] 張小華,劉慧賢,丁世宏,等.基于擾動觀測器和有限時間控制的永磁同步電機調速系統[J].控制與決策,2009,24(7):1028-1032.
[7] 馮曉云.電力牽引交流傳動及其控制系統[M].北京:高等教育出版社,2009.
[8] 趙希梅,郭慶鼎.基于擾動觀測器和重復控制器的永磁直線同步電動機魯棒控制[J].中國電機工程學報,2010,30(15):64-69.
[9] 李嘉全,丁策,孔德杰,等.基于速度信號的擾動觀測器及在光電穩定平臺的應用[J].光學精密工程,2011,19(5):998-1004.
[10] 劉穎,周波,方斯琛.基于新型擾動觀測器的永磁同步電機滑模控制[J].中國電機工程學報,2010,30(9):80-85.
收稿日期:2024-05-07
作者簡介:陳秉禎(1991—),男,江蘇鎮江人,碩士研究生,講師,研究方向:城軌供配電。
基金項目:南京鐵道職業技術學院校青年基金Yq220013項目支持