660 MW汽動給水泵組MEH保護(hù)優(yōu)化及可靠性分析
2024-09-26 00:00:00李紀(jì)勇李松澤
機電信息 2024年18期
摘要:在電廠的汽水系統(tǒng)中,汽動給水泵的可靠性和穩(wěn)定性對于提升火電廠運行效率及安全性起著至關(guān)重要的作用。現(xiàn)以某660 MW火電機組中兩臺汽動給水泵因跳閘引發(fā)的鍋爐MFT保護(hù)動作事件為例,闡述了該發(fā)電廠汽動給水泵MEH控制系統(tǒng)的保護(hù)邏輯、系統(tǒng)組成及控制模式,通過對MEH控制系統(tǒng)的保護(hù)優(yōu)化改造,降低了設(shè)備故障率,提升了設(shè)備的可靠性與穩(wěn)定性。
關(guān)鍵詞:汽動給水泵;MEH;保護(hù)優(yōu)化;可靠性
中圖分類號:TM621 文獻(xiàn)標(biāo)志碼:A 文章編號:1671-0797(2024)18-0043-03
DOI:10.19514/j.cnki.cn32-1628/tm.2024.18.011
0 引言
隨著電網(wǎng)負(fù)荷需求的持續(xù)增長,大型火力發(fā)電機組的數(shù)量也在不斷增加。在這種背景下,全面實施節(jié)能降耗、降低運行成本、提高機組利用率等措施顯得尤為重要[1]。在火力發(fā)電機組中,鍋爐給水的主驅(qū)動泵通常采用變速汽動給水泵,而汽動給水泵的MEH控制系統(tǒng)是機組自動控制系統(tǒng)的關(guān)鍵組成部分。傳統(tǒng)的汽動給水泵液壓調(diào)節(jié)系統(tǒng)由于其結(jié)構(gòu)復(fù)雜、自動化水平低、操作煩瑣以及維護(hù)和檢修工作困難,已經(jīng)不能滿足當(dāng)前大型機組鍋爐給水自動調(diào)節(jié)的需求[2]。盡管部分機組已經(jīng)采用了電液控制系統(tǒng),但電液轉(zhuǎn)換器性能不佳加上自動化技術(shù)滯后,同樣無法滿足大型機組長期安全運行和高自動化的要求[3]。鑒于此,本文通過分析某660 MW火電機組在汽動給水泵跳閘后檢查出的問題,對MEH控制系統(tǒng)進(jìn)行了優(yōu)化改造,提高了機組的運行可靠性。
1 系統(tǒng)保護(hù)邏輯及組成
1.1 MEH系統(tǒng)保護(hù)邏輯
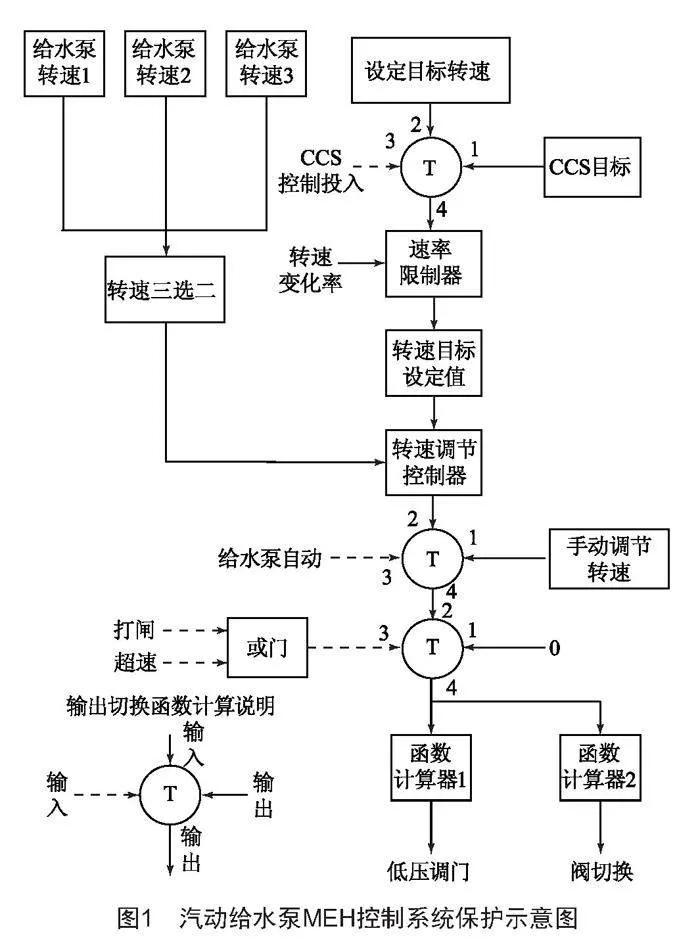
該發(fā)電廠汽動給水泵MEH控制系統(tǒng)保護(hù)邏輯如圖1所示。
在機組啟動和正常運行期間,通過測速元件采集給水泵的轉(zhuǎn)速,然后通過輸入卡件將開關(guān)量(三取二)傳送至調(diào)速控制器。數(shù)字處理單元(DPU)對這些信號進(jìn)行判斷、分析和計算,綜合LVDT返回的信號后,將控制信號發(fā)送至低壓調(diào)節(jié)閥的伺服閥,通過伺服閥改變低壓調(diào)節(jié)閥的開度,從而控制給水泵的轉(zhuǎn)速,以調(diào)節(jié)泵的出口壓力和流量[4]。當(dāng)蒸汽給水泵的轉(zhuǎn)速發(fā)生變化時,給水泵的輸出流量也會相應(yīng)改變,以滿足鍋爐給水流量的需求。
1.2 系統(tǒng)組成
每臺汽動給水泵的MEH控制系統(tǒng)均配備了一套獨立的EH油液壓系統(tǒng),執(zhí)行機構(gòu)包括低壓蒸汽主閥、低壓蒸汽調(diào)閥和逆止閥。在控制功能方面,涵蓋了汽動給水泵的打閘、復(fù)位、掛閘(開啟低壓主汽門)、正常運行、轉(zhuǎn)速調(diào)節(jié)控制以及相關(guān)的超速試驗和保護(hù)功能。MEH控制系統(tǒng)還具備與CCS相連的遠(yuǎn)程控制接口,作為CCS子系統(tǒng)完成協(xié)調(diào)控制[5]。整個系統(tǒng)由PCU13過程控制單元、主控畫面、液壓元件、伺服閥、測速裝置、模擬遠(yuǎn)程控制接口和連接電纜組成,主控畫面可同時控制兩臺汽動給水泵。控制柜的輸出通過伺服閥裝置將電信號轉(zhuǎn)換為液壓油信號,以控制低壓蒸汽主閥和低壓蒸汽調(diào)節(jié)閥的液壓伺服電機的開度,從而調(diào)節(jié)給水泵的轉(zhuǎn)速、輸出壓力和流量[6-7]。
1.3 控制方式及性能指標(biāo)
自動模式:在自動運行啟動后,系統(tǒng)將自動追蹤目標(biāo)轉(zhuǎn)速的設(shè)定值,以此實現(xiàn)對鍋爐給水流量的精準(zhǔn)自動控制。
手動模式:當(dāng)切換到手操模式時,操作員可以設(shè)定具體的目標(biāo)速度值以及速度變化率,通過這種方式實現(xiàn)對手動調(diào)節(jié)速度目標(biāo)值的直接控制。
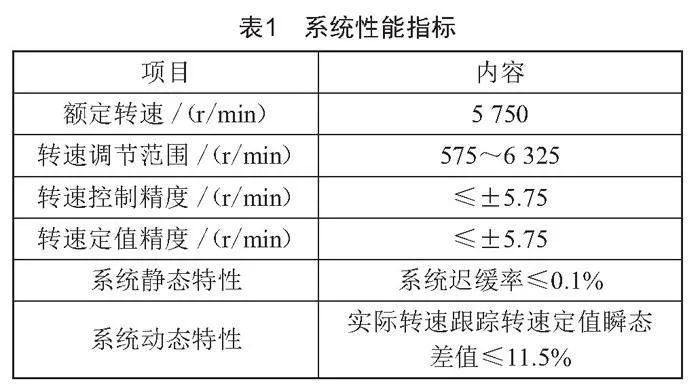
CCS模式:在給水泵處于自動模式的基礎(chǔ)上,一旦接收到MEH主控畫面發(fā)出的CCS遙控請求,系統(tǒng)會根據(jù)鍋爐給水流量的前饋信號,自動調(diào)節(jié)低壓主汽門的開度,對給水泵的轉(zhuǎn)速進(jìn)行匹配調(diào)節(jié),從而有效控制鍋爐的給水流量,主要性能指標(biāo)如表1所示。
2 異常分析及處理
2.1 事件經(jīng)過
某年5月28日,某發(fā)電廠1號機組在負(fù)荷600 MW、主蒸汽壓力23.7 MPa、主蒸汽溫度565 ℃下運行,其制粉系統(tǒng)1A、1B、1C、1D、1E、1F及汽動給水泵1A和1B均處于遙控自動控制狀態(tài)。10:00左右,運行監(jiān)盤人員注意到1A汽動給水泵軸承1號測點的振動值逐漸上升,實地測量得到的軸承振動值約為0.01 mm。熱工和檢修班人員現(xiàn)場檢查并未發(fā)現(xiàn)明顯異常。8 min后,1A汽動給水泵因軸承振動值過高跳閘,2 min后,1B汽動給水泵突然跳閘。通過DCS系統(tǒng)檢查,發(fā)現(xiàn)跳閘首出為“泵出口流量低”,而MEH控制系統(tǒng)保護(hù)動作的首要原因是“給水泵超速”。
2.2 原因分析
1)經(jīng)詳細(xì)查閱記錄,1A汽動給水泵的跳閘事件是由于其軸承1號測點的振動值達(dá)到了預(yù)設(shè)的跳閘值。該振動跳閘邏輯設(shè)計為:當(dāng)同一軸承的X方向或Y方向測量值中任一達(dá)到跳閘值(0.08 mm)時,即會觸發(fā)保護(hù)動作。通過檢查工程師站的歷史數(shù)據(jù),發(fā)現(xiàn)X方向的振動值達(dá)到了0.088 mm,而Y方向則為0.020 7 mm。雖然Y方向振動值未達(dá)跳閘標(biāo)準(zhǔn),但X方向的瞬時振動值已超出跳閘保護(hù)限值,因此導(dǎo)致了1A汽動給水泵的跳閘。在熱工機控人員對振動測量裝置元件、傳感元件及保護(hù)定值進(jìn)行核實確認(rèn)無誤后,運行人員重新啟動1A汽動給水泵至正常轉(zhuǎn)速。隨后,熱工機控人員再次檢測,確認(rèn)1A汽動給水泵在X、Y兩個方向上的振動值均已回歸正常范圍。然而,進(jìn)一步回顧歷史曲線記錄,發(fā)現(xiàn)1A汽動給水泵后軸1號測點在5月21日至22日期間曾兩次觸及報警值(0.04 mm),其中最大實時振動值達(dá)到了0.048 mm。而在5月28日1A汽泵跳閘前,前軸1號和2號測點的振動值也分別高達(dá)0.05 mm和0.045 mm。
結(jié)合SIS系統(tǒng)所記錄的數(shù)據(jù)以及保護(hù)動作發(fā)生前檢修人員的現(xiàn)場監(jiān)測情況分析,綜合推斷此次1A汽泵跳閘可能的原因有兩種:一種是1A汽泵自身突發(fā)的瞬時異常振動所引發(fā),但需注意,由于SIS系統(tǒng)存在缺陷,無法準(zhǔn)確查閱操作日志時間及實時歷史數(shù)據(jù)以進(jìn)行更精確的分析;另一種可能性是振動測量裝置元件或傳感元件受到了外部信號的干擾,從而誤觸發(fā)了保護(hù)動作。
2)1B汽動給水泵跳閘的原因確定為超速。其超速保護(hù)動作邏輯設(shè)計如下:在給水泵MEH系統(tǒng)中,當(dāng)控制模式設(shè)定為CCS方式時,若實時轉(zhuǎn)速與設(shè)計值的偏差超出500 r/min,將觸發(fā)汽泵跳閘保護(hù)。此設(shè)計主要目的是預(yù)防小機低壓調(diào)門出現(xiàn)卡澀現(xiàn)象。經(jīng)查閱操作日志發(fā)現(xiàn),1A汽動給水泵跳閘后,機組迅速降低電負(fù)荷,同時切換至閥控模式,鍋爐燃料及給水自動控制系統(tǒng)亦轉(zhuǎn)為手動操作,而此時給水泵MEH控制系統(tǒng)仍保持在CCS自動模式。鍋爐給水流量降低,1B汽動給水泵接收到的指令迅速增至100%,導(dǎo)致汽動給水泵低壓調(diào)門全開。然而,受1A汽動給水泵跳閘及機組快速降負(fù)荷影響,1B給水泵的汽源壓力不足,同時鍋爐主汽壓力偏高,限制了1B給水泵的出力。經(jīng)折算分析當(dāng)時汽源壓力,汽動給水泵轉(zhuǎn)速僅能維持在5 000~5 200 r/min范圍內(nèi),無法達(dá)到設(shè)定轉(zhuǎn)速值,最終因1B汽動給水泵轉(zhuǎn)速設(shè)定值與實時轉(zhuǎn)速偏差超出500 r/min,觸發(fā)了MEH控制系統(tǒng)中的超速保護(hù)動作,導(dǎo)致跳閘。
2.3 優(yōu)化處理
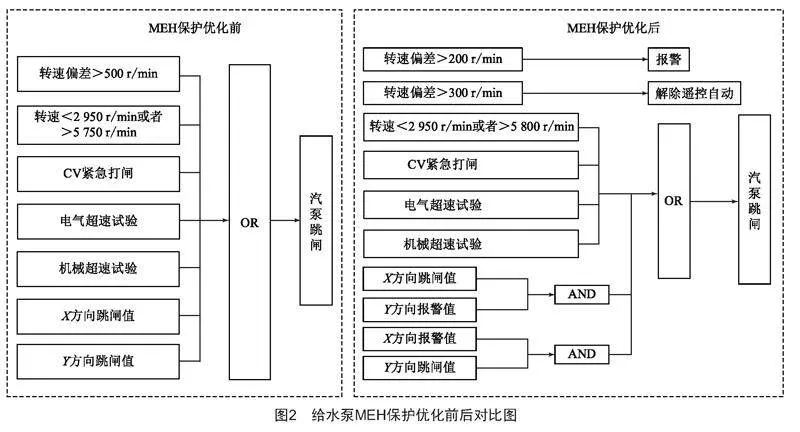
針對該廠發(fā)生的1B汽動給水泵因最小流量保護(hù)動作跳閘,且MEH首出顯示為1B汽動給水泵超速保護(hù)動作跳閘,進(jìn)而引發(fā)鍋爐給水流量低保護(hù)動作觸發(fā)MFT的案例,該廠對汽動給水泵組的MEH控制系統(tǒng)進(jìn)行了優(yōu)化。MEH保護(hù)優(yōu)化前后對比圖如圖2所示。
1)針對SIS系統(tǒng),增設(shè)了操作日志和采集時間等詳細(xì)記錄功能,同時實現(xiàn)了相關(guān)數(shù)據(jù)的實時查詢,以提升系統(tǒng)的透明度和可追溯性。
2)雖然給水泵低壓主汽門卡澀導(dǎo)致超速的可能性較小,但仍為給水泵DCS保護(hù)設(shè)計了多重超速保護(hù)措施,包括機械超速保護(hù)和電超速保護(hù)。此次技術(shù)改造中,將給水泵的跳閘保護(hù)邏輯進(jìn)行了調(diào)整:當(dāng)實時轉(zhuǎn)速與設(shè)計值的偏差超過200 r/min時,系統(tǒng)將發(fā)出報警;偏差超過300 r/min時,給水泵將自動切除遙控,并自動維持3 000 r/min的轉(zhuǎn)速運行。
3)為防止單一方向振動值失真引發(fā)汽泵誤跳閘,優(yōu)化了汽動泵的振動大跳閘邏輯判斷條件。只有當(dāng)X方向的振動跳閘值與Y方向的報警值同時觸發(fā),或者Y方向的振動跳閘值與X方向的報警值同時觸發(fā)時,才會判定為振動大跳閘。
4)將給水泵的跳閘演示保護(hù)延時從1 s修改為3 s,以提高系統(tǒng)的穩(wěn)定性。同時,在電動給水泵處于備用自啟狀態(tài)下,當(dāng)機組負(fù)荷大于50%且發(fā)生給水泵跳閘時,系統(tǒng)將延時10 s后聯(lián)鎖啟動電動給水泵,并將其指令增加至65%,以確保給水的連續(xù)供應(yīng)。
5)利用機組停運和停泵期間,對給水泵的MEH系統(tǒng)進(jìn)行了全面檢查,包括信號通道、保護(hù)卡件、保護(hù)定值、振動防護(hù)邏輯以及系統(tǒng)防外界信號等,以確保系統(tǒng)的安全可靠運行。
6)對給水泵的進(jìn)口流量保護(hù)邏輯進(jìn)行了調(diào)整。原先的邏輯是在進(jìn)口流量小于325 t/h且在再循環(huán)45 s內(nèi)未增加到80%時觸發(fā)保護(hù)動作。現(xiàn)在將這一時間縮短至20 s,即當(dāng)進(jìn)口流量持續(xù)低于325 t/h且在再循環(huán)20 s內(nèi)未增加到80%時,若未達(dá)到要求則汽泵將跳閘。
7)為了提升1A、1B汽動給水泵的運行安全性,將超速保護(hù)跳閘邏輯值進(jìn)行了修改。現(xiàn)在,當(dāng)轉(zhuǎn)速達(dá)到5 800 r/min或轉(zhuǎn)速在2 950 r/min持續(xù)5 s時,將觸發(fā)超速保護(hù)跳閘動作。
3 結(jié)束語
綜上所述,該廠對給水泵跳閘保護(hù)進(jìn)行了調(diào)整:原先當(dāng)實時轉(zhuǎn)速與設(shè)計值的偏差超過500 r/min時觸發(fā)跳閘保護(hù),而經(jīng)過此次技術(shù)改造后,當(dāng)偏差超過200 r/min時系統(tǒng)將發(fā)出報警,超過300 r/min時給水泵將自動切除遙控并維持在3 000 r/min轉(zhuǎn)速,不會觸發(fā)跳閘保護(hù)。此外,還對給水泵振動防護(hù)邏輯、系統(tǒng)防外界信號干擾、給水泵入口流量低以及系統(tǒng)缺陷等方面進(jìn)行了優(yōu)化,以確保汽動給水泵組MEH控制系統(tǒng)的安全性和可靠性。
[參考文獻(xiàn)]
[1] 李婉華.汽動調(diào)速給水泵控制系統(tǒng)的分析與介紹[J].廣東自動化與信息工程,2006(2):38-40.
[2] 許新聞.600 MW汽輪機組MEH常見問題分析及處理[J].廣西電力,2008(3):17-20.
[3] 孟慶波.汽動給水泵試運行中的問題分析[J].山東工業(yè)技術(shù),2018(8):50.
[4] 譚再奎.660 MW給水泵汽輪機MEH伺服卡及配套組件改造方案[J].流體測量與控制,2022,3(5):77-80.
[5] 田林林.汽動給水泵控制及保護(hù)系統(tǒng)升級改造[J].科技創(chuàng)新導(dǎo)報,2017,14(30):1.
[6] 諸葛杰.給水泵小汽輪機危急跳閘系統(tǒng)DCS改造[J].中國科技信息,2010(12):177-178.
[7] 趙玉柱,王章生,徐厚達(dá).給水泵汽輪機調(diào)速系統(tǒng)的改造及優(yōu)化運行[J].華電技術(shù),2011,33(2):30-32.
收稿日期:2024-05-15
作者簡介:李紀(jì)勇(1989—),男,重慶人,工程師,主要從事電廠熱工控制相關(guān)工作。