電動乘用汽車建模與仿真分析
2024-09-25 00:00:00李敏卜喬生
汽車電器 2024年9期




【摘 要】文章以某電動乘用車為原型,對車輛進行解析后,在CRUISE中進行物理連接、信號連接、子模塊參數輸入,并搭建等效車輛模型,同時在NEDC工況、CLTC工況、0—100km/h全負荷加速、100km/h制動情況下進行仿真試驗,通過驗證車輛模型的動力性和經濟性,證明車輛模型的可行性,為進一步優化車輛性能提供試驗依據。
【關鍵詞】電動汽車;CRUISE;建模;仿真
中圖分類號:U469.72 文獻標識碼:A 文章編號:1003-8639( 2024 )09-0016-04
Modeling and Simulation Analysis of Electric Passenger Vehicles*
LI Min,BU Qiaosheng
(College of Automotive and Information Engineering,Guangxi Vocational andTechnical College of Ecological Engineering,Liuzhou 545004,China)
【Abstract】This paper takes an electric passenger car as a prototype,analyzes the vehicle,carries out physical connection,signal connection and sub-module parameter input in CRUISE,and builds an equivalent vehicle model. At the same time,simulation experiments are conducted under NEDC condition,CLTC condition,0—100km/h full load acceleration and 100km/h braking condition. The feasibility of the vehicle model is proved by verifying the power and economy of the vehicle model,which provides experimental basis for further optimization of vehicle performance.
【Key words】electric vehicle;CRUISE;modeling;simulation
為了減輕環境污染和能源短缺問題,中國積極推進電動汽車技術發展[1]。由于電動汽車驅動電機的特點,可以為車輛提供驅動力,在車輛需要減速時,可以作為發電機提供制動力,并且為電池進行反向充電,提升電動汽車能量管理效率,增加續航里程。通過仿真試驗可以降低研發成本,幫助優化汽車的性能[2],提高汽車研制的可靠性,驗證整車模型各個部件參數匹配合理與否,并進一步優化電動汽車各個系統參數,使各個部件匹配更加合理,從而達到降低能耗的目的。CRUISE軟件可以用于車輛的動力性、經濟性的仿真,其模塊化的建模理念使用戶可以便捷地搭建不同布置結構的車輛模型,其完善的求解器可以確保計算的速度[3]。本文將依托CRUISE軟件的強大仿真功能,以某電動乘用汽車為原型,對電動乘用汽車進行參數匹配和仿真,并對搭建模型的合理性進行驗證。
1 仿真流程
1.1 采集數據
以某款電動乘用車為原型車輛,通過查閱車輛手冊、試驗驗證,得到原型電動汽車組件的結構參數、布置形式、控制邏輯、功能指標等,為模型搭建提供依據。
1.2 選擇建模工具
CRUISE模塊化的概念可以對各種汽車的動力總成配置進行分析,可對車輛制動性能、經濟性、動力性等進行仿真,被廣泛應用于汽車研發、設計、制造和測試等各個領域,且功能全面、仿真精度高、兼容性強,可與AMESim、Simulink、Carsim、KULI等軟件實現聯合仿真,也可為項目后續研發提供方便。
1.3 建模與仿真
對原型車輛的結構、功能進行分析。首先,在CRUISE中選擇合理的子模塊搭建簡化的物理模型;隨后,建立汽車系統的子系統之間的物理連接和信號連接,在子模型中進行參數化處理,完成車輛建模;最后,在CRUISE不同的計算任務下,運行仿真車輛,輸出仿真結論,驗證車輛模型的合理性。
2 建模過程與方法
2.1 確定模型基本參數
本文以某電動乘用汽車為原型,通過解析車輛結構,得到車輛物理參數,選擇合理的子系統模塊(包含車輛模塊、電機模塊、電池模塊、BMS電子控制單元、DC/DC轉換器、制動器、車輛模塊、用電設備等),構建車輛簡易的物理模型。電動汽車的車輛質量、電機性能、電池容量是影響車輛動力性和經濟性的關鍵因素。
2.1.1 車輛建模參數
以某電動乘用汽車為原型,經過翻閱手冊、車輛試驗等方式,確定模型車輛相關參數,如表1所示。
2.1.2 電機建模參數
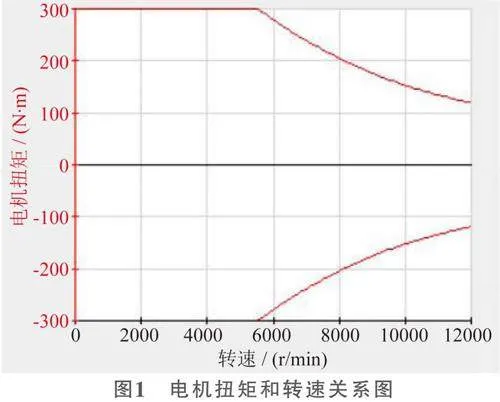
電機是電動汽車的驅動單元,其技術性能直接影響車輛運行的動力性和經濟性。電機扭矩和轉速關系如圖1所示。
電機扭矩、轉速與效率圖如圖2所示。圖2中,輸出扭矩的正區域為驅動特性,負區域為發電機特性,在5500 r/min附近為電機恒扭矩和恒功率的切換點。電機主要參數見表2。
2.1.3 電池建模參數
動力電池是制約電動汽車發展的關鍵因素。根據原型車輛,確定了動力電池相關參數,詳見表3。
2.2 車輛建模
2.2.1 模型子模塊選擇
車輛模型采用電機前置前輪驅動。使用到模型庫中的子模塊有:車輛模塊(Vehicle)、動力電池模塊(Battery H)、駕駛室模塊(Cockpit)、電機模塊(Electric Machine)、電池管理系統模塊(Battery Management System)、主減速器模塊(Single Ratio Transmission)、制動器模塊(Brake)、車輪模塊(Wheel)和電氣系統(Electrical System)等。
2.2.2 建立物理連接
各子系統模塊選定后,根據汽車配置方案和部件連接關系建立模塊的物理連接(只需使用Connect連接功能即可建立物理連接)。電動汽車整車模型如圖3所示。傳動系各部件之間和車輪與制動器之間均有直接的物理連接關系,但駕駛室與動力傳動系和制動系之間沒有物理連接,在仿真過程中,它們之間通過信號連接傳遞信息[4]。
2.2.3 建立信號連接
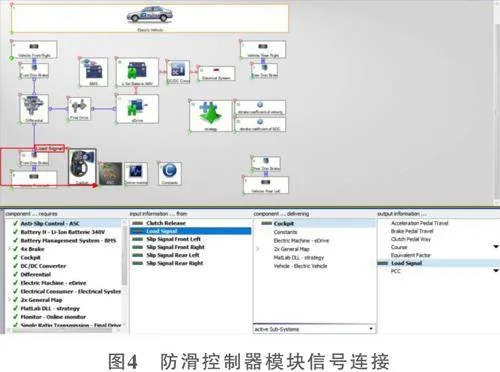
信號連接需熟悉汽車內部各子模塊之間的信號連接與控制關系,往往難度較大,耗時較長[5]。在實際連接時,通過查閱維修手冊、實車驗證等方式,確認汽車內部各子模型之間的信號連接與控制關系,如防滑控制器(ASC)需要的負載信號(Load Signal)來自駕駛室(Cockpit),如圖4所示。駕駛室(Cockpit)需要的電機轉速信號(Speed)來自驅動電機。
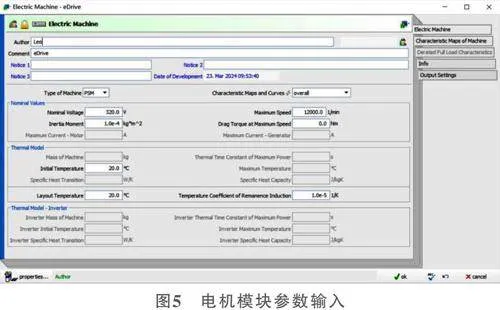
2.2.4 各子模塊參數輸入
將測量數據填入各子模塊參數中,逐項進行仿真前驗證,如圖5所示。
2.3 仿真結果分析
2.3.1 經濟性仿真
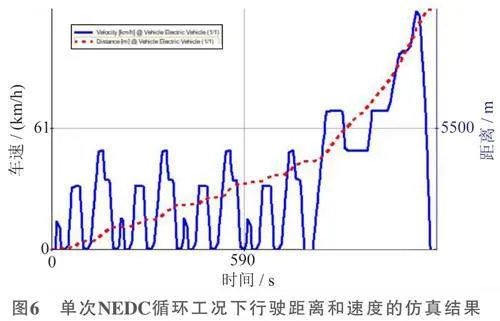
1)NEDC循環工況續駛里程。新歐洲行駛循環(New European Driving Cycle,NEDC)是一種標準化測試,用于衡量歐洲車輛的燃油消耗和排放。該測試包括一系列模擬城市和郊區行駛條件的循環,結果用于確定車輛的能效評級和排放水平。通過Cycle Run-NEDC循環工況對模型車輛行駛里程進行仿真計算。將仿真次數設置為最大,SOC期望最終值設置為5%,得到車輛能耗結果,數據顯示:在NEDC循環工況下,車輛總能耗為49.838kW·h,可行駛309.971km,電動燃油經濟性為6.2196km/kW·h。該結果表明:在NEDC工況下,模型車輛能滿足經濟性需求。圖6為單次NEDC循環工況下行駛距離和速度的仿真結果。
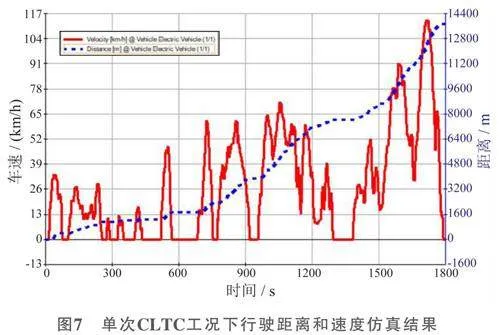
2)CLTC循環工況。中國版的循環工況(City and Local Traffic Cycle,CLTC)是一種標準化測試,用于評估車輛在城市和地方道路行駛條件下的能耗和排放水平。這個循環測試程序模擬了中國城市和地方道路的實際駕駛情況,以便更準確地反映車輛在中國特定行駛環境下的能效評級和排放性能。中國CLTC循環工況通常用于評估車輛的實際燃油經濟性和環境友好性,有助于制定和執行相關的排放標準和政策。這種測試程序對于推動中國汽車行業的可持續發展和環保意識的提高具有重要意義。通過Cycle Run-CLTC循環工況對模型車輛行駛里程進行仿真計算,將仿真次數設置為最大,SOC期望最終值設置為5%,得到車輛能耗仿真結果,數據顯示:在CLTC循環工況下,車輛總能耗為49.652kW·h,可行駛255.008km,電動燃油經濟性為5.136km/kW·h。該結果表明:在CLTC工況下,模型車輛能滿足經濟性需求。圖7為單次CLTC工況下行駛距離和速度仿真結果。
2.3.2 動力性仿真
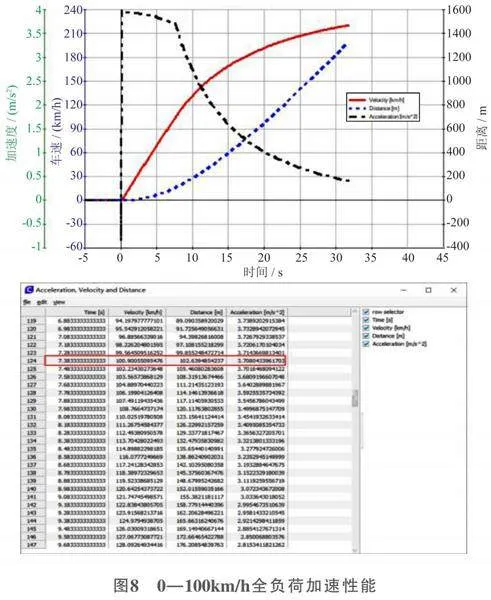
以0—100km/h全負荷加速性能為例。百公里加速指汽車從0km/h加速至100km/h所需要的時間,也是衡量汽車動力性的3大指標之一。百公里加速時間越快,汽車動力性越好,反之動力性越差。0—100km/h全負荷加速性能如圖8所示,結果顯示:模型車輛0—100km/h全負荷加速性能的加速時間為7.38s,滿足家用乘用車需求。
2.3.3 制動性能仿真
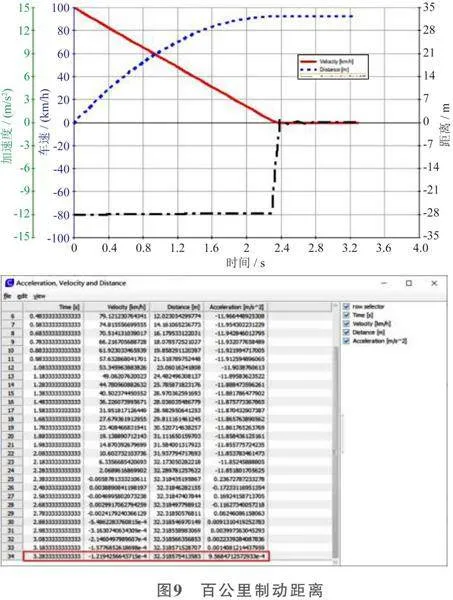
以100km/h制動距離為例。百公里制動距離指汽車以100km/h的速度行駛,將制動器壓到底,達到最大制動力后,開始制動到汽車停止的距離。百公里制動距離如圖9所示,結果顯示:模型車速為100km/h時,在制動踏板施加100N的壓力,車輛制動距離為32.32m,說明模型車輛制動效果較好。
3 結論
本文通過使用CRUISE對等效模型車輛進行仿真試驗,對車輛建模的方法和仿真的過程進行論述,最終得到了車輛運行的經濟性和動力性仿真數據。
1)經濟性表現為:在NEDC工況下運行,車輛總能耗為49.838kW·h,可行駛309.971km,電動燃油經濟性為6.2196km/kW·h;在CLTC工況下運行,車輛總能耗為49.652kW·h,可行駛255.008km,電動燃油經濟性為5.136km/kW·h。
2)動力性表現為:模型車輛0—100km/h全負荷加速性能的加速時間為7.38s。
3)制動性能表現為:模型車速為100km/h且施加制動力為100N時,車輛制動距離為32.32m。
試驗結果表明,車輛模型結構合理、可行,可為電動汽車的參數選擇以及結構優化提供依據。
參考文獻:
[1] 江興洋,鐘遠婷,吳帥. 基于CRUISE的純電動客車動力匹配仿真分析[J]. 現代機械,2022(5):53-57.
[2] 姜海斌,黃宏成. CRUISE純電動車動力性能仿真及優化[J]. 機械與電子,2010(4): 61-65.
[3] 賈騰飛,張洪信,趙清海,等. 基于Isight與Cruise耦合計算的汽車傳動比優化[J]. 機械制造,2017,55(10):104-107.
[4] 袁苑,錢立軍,許宏云. 基于CRUISE純電動客車參數匹配與仿真分析[J]. 上海汽車,2012(5):3-5.
[5] 王保華,羅永革. 基于CRUISE的汽車建模和仿真[J].湖北汽車工業學院學報,2005,19(2):5-8.
(編輯 凌 波)
*基金項目:廣西高校中青年教師科研基礎能力提升項目(2023KY1258)。
