口岸城市末端無人機精準配送與投遞模型
2024-09-19 00:00:00楊曉姚敏
無線電工程 2024年6期





摘 要:針對物流無人機尚未建立根據應用場景差異開展特性研究的問題,提出一種應用于西南口岸城市末端,即丘陵、山地地形下城郊與鄉村地區物流無人機系統。基于物流配送需求,提出一種“路徑規劃+圖像配準投遞” 的雙目標模型。利用A* 算法與地面危險區域分類,采用一種保證飛行安全的“跳躍式” 路徑規劃策略;利用“模板+SURF” 算法開展主動判斷,快速定位卸貨點并完成卸貨。基于實際場景的驗證性試驗,建立的路徑規劃模型在避讓山火隱患區域的前提下,較人工配送效率提高50% 以上;所建立圖像配準模型在耗費14% 機載電源的條件下可實現88% 的配準準確率,相比傳統SIFT 算法耗電量增加7% 、準確率提高57% ;相比Desnet 算法耗電量降低18% 、準確率降低7% 。所設計系統在丘陵與山區區域,以及房屋相似度高的區域可大大提高物流無人機的配送與投遞準確度。
關鍵詞:口岸城市末端;物流無人機;“跳躍式” 路徑規劃;圖像配準
中圖分類號:TP391 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3106(2024)06-1569-07
0 引言
針對不同領域的獨特應用場景及需求,無人機在多領域均已經取得了顯著發展。在城市區域的物流方面,提供“最后一公里”配送服務的物流無人機因不受限于地面交通,表現出明顯的高效、迅捷等特征。
隨著物流企業逐步建立起空中配送網絡,相關研究在現實需求下得到了越來越多的關注。Dorling等[1]推導了多旋翼無人機的能耗模型,證明了能耗隨負載和電池質量的變化基本呈現出線性關系。張啟錢等[2]以路徑長度、能耗以及避障的綜合成本最低為研究對象,建立起基于A* 的低空無人機路由快速搜索模型。考慮到續航有限的問題,周浪[3]建立了遺傳算法推導的“車+無人機”協同路徑優化模型。郭興海等[4]對無人機執行配送任務過程中的任務分配、路徑規劃均開展過程中調整,建立起以路徑長度、地形、雷達威脅和無人機碰撞為綜合成本的最優規劃。Torabbeigi 等[5]通過變預處理對最小集覆蓋路徑模型進行快速解模。
盡管已經建立了一定的研究基礎,物流無人機仍難以充分滿足實際應用的需要[6-7],缺乏針對特定配送場景的差異化設計是導致這一現象的重要原因之一。隨著西南地區口岸城市建設及其末端在國、內外貿易交流中地位與職能的明顯提升,其所承擔的高價值時效商品進、出口對于Production toConsumer (P2C)“最后一公里”配送有著越發強烈的高效需求。物流無人機恰適應這類人口“小聚集、大分散”的特征,配送路徑存在大量包含丘陵、山地地形,地面樹木、灌木繁茂,地面障礙復雜的配送環境。
路徑規劃是實現物流無人機依據環境主動調整的重要前提。已有的物流無人機配送路線規劃模型主要遵行2 類基本模式:① 起自配送點、止于目的地的直線配送;② 基于導航地圖的既有道路路線規劃[8-10]。已有的路徑規劃研究往往據上述模式進行深化與優化,在實際操作過程中,模式①配送距離近、線路規劃簡單,但存在無人機失聯風險,若發生于山區范圍,不僅搜尋成本高,也存在引發山火等隱患。模式②安全性高、規劃成本低,但是在盤山、繞行路的場景下,無人機立體配送、不受地形限制的優勢將被大幅削減,配送效率低。此外,部分目的地所在位置沿未被標識的鄉間道路分布,可能導致無法利用導航地圖規劃路徑,使得無人機飛行路徑規劃失效,配送任務無法完成。基于上述思路,主動路徑規劃優化主要可分為以A* 算法為代表的傳統路徑規劃、以概率地圖法(Probabilistic Roadmap Method,PRM)為代表的采樣路徑規劃、以蟻群算法為代表的智能仿生路徑規劃[11-13]。無人機配送過程需兼顧起飛質量與飛行效率,采用現場采集、處理并規劃的邊緣處理對機身能耗管理、搜索效率要求較高,實際應用效果較差。
基于規劃路徑飛抵目的地,即西南地區的城郊、鄉村等區域后,無人機面臨當地“庭院+樓棟”分布緊湊、結構與外形類同度均較高,導致準確投遞較為困難。通過無人機攜帶微型相機對目的地樓頂進行圖像匹配識別,可明顯提高配送卸貨準確率。當前,圖像匹配研究領域已經積累了較多的研究成果,主要包括以模板匹配為代表的模式識別、SURF 等為代表的特征識別[14-15]、以Desnet 網絡為代表的人工智能識別[16-18]。模板匹配實現簡單、計算代價小,但只能實現平移匹配,若原圖像中的匹配目標發生旋轉或大小變化,則匹配難以實現。Desnet 網絡通過特征重用和旁路(Bypass)設置,在減少參數量的同時緩解梯度消失、模型退化問題,使得目標圖像形變后仍可保持較高的識別準確率,但是人工智能算法需要樣本進行訓練,對處理器要求較高,難以滿足物流無人機的能耗管控,故在實用階段中仍然存在一定的問題。由于無人機配送的應用場景中,自不同視角、距離和環境進行目的地匹配的可能性都極大,故需要采取一種魯棒性強、準確率高,可適應不同條件的圖像匹配算法。
針對以路徑規劃中存在的問題,結合2 類路徑規劃的特點,采用總體遵循既有道路、局部忽略沿途障礙的方式,通過“跳點”合理避讓部分地面障礙,采用改進A* 算法開展飛行線路路徑規劃,可兼顧配送的安全與效率。同時,利用無人機視覺,采用“模板+SURF”圖像配準算法,可以實現準確定位卸貨位置,增強無人機下降過程的飛行狀態穩定與安全。對比人工配送與直線飛行路徑規劃,本文所采用A* 算法通過判斷危險區域實現了“跳點”規劃,較人工配送效率提高50% 以上的同時實現100% 安全飛行;相較傳統特征識別以及人工智能識別算法,本文所采用“模板+SURF”算法兼顧了運算功耗與準確度,在運算功耗比人工智能算法降低5% ~18% 的條件下,準確率達到88% ;盡管功耗相比傳統SURF 與SIFT 算法高,但準確率同樣得到長足提高。上述實際場景試驗驗證了本文所提出算法的在特定場景下(西南地區口岸末端城郊、鄉村)的有效性與實用性。
1 口岸末端無人機配送模型
1. 1 場景描述與相關設定
某邊境口岸城市下轄農村物流配送中心利用無人機搭載貨物進行“最后一公里”運輸,貨物運輸采用四旋翼無人機,無人機攜帶可充電鋰電池,貨物送達后需返回配送中心。貨物無人機的配送高程設定于非管制高程以保證配送的即時性與靈活性,同時無人機需通過識別地面障礙物及高程保證飛行安全。
本模型的主要架設包括:① 配送中心位置固定,配送目的地位置已知,且由收貨人提供收貨地點根據模板拍攝的場景照片;② 無人機實行點對點的配送方式;③ 無人機飛行高度設置為距離地面30 m凈高,隨地面高程變化及避讓障礙物而對應調整飛行高度;④ 無人機于滿電狀態下起飛出發,飛行狀態參數從起飛始設定數值范圍,途中飛行狀態禁止超出設定值,途中飛行任務不變更。實驗采用的無人機如圖1 所示。
1. 2 局部跳躍式路徑規劃模型
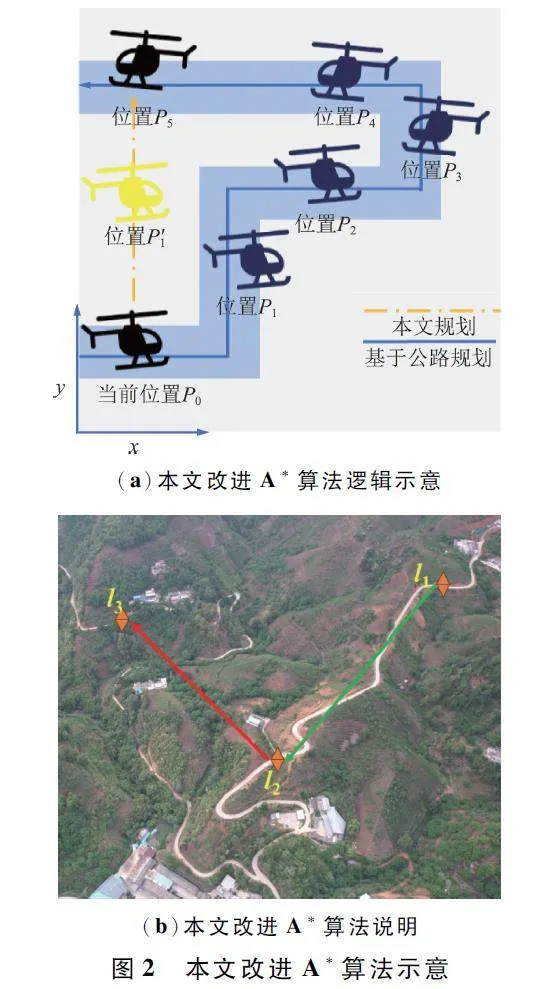
本文改進A* 算法示意如圖2 所示。l1 與l2 之間不存在樹林、草場等障礙物,無人機可以實現P0到P5 位置點的跳躍,在保證安全的前提下,大幅度提高配送效率;而l2 與l3 之間存在樹林、草場等障礙物,無人機只能沿公路進行配送,以保證配送的安全性。為了兼顧飛行的安全性和經濟性,無人機與地面的相對飛行高度固定在30 m。標準的A* 算法以起始位置向目標進行搜尋,從而獲得最小估價航跡,估價函數f(n)如下:
f(n) = g(n)+ h(n), (1)
h(n) = (xn - xg )+ (yn - yg ), (2)
式中:g(n)、h(n)分別為起始位置到當前位置的實際代價、當前位置到目標位置的預估代價,xn、yn 分別為當前位置橫、縱坐標,xg、yg 分別為目標位置橫、縱坐標。
為此,本文以公路為安全約束,直線為效率約束對A* 算法進行改進。如圖2(a)所示,設位置P′1 為跳點,跳點間的樹林、草場障礙物長度為Sobst,跳點間的可通過長度為Stunle。建立當前位置及其鄰近位置矩陣P 如下:
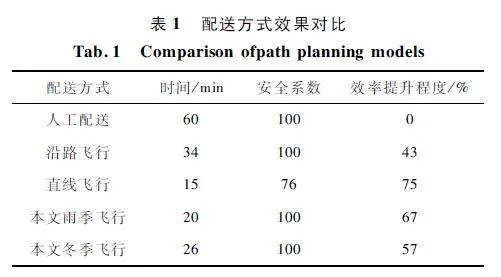
常規無人機配送路徑如圖5 所示,臨滄市紅糖村作為最末端分支快遞服務站,服務范圍包含周家村、范家村等10 個鄉村的快遞業務。其中,快遞由紅塘村配送至周家,配送路程約8. 5 km、配送時間約60 min,效率嚴重低下。圖5(a)為無人機基于百度地圖沿公路進行配送,該方法路徑規劃簡單,無人機以30 m 的相對高度沿公路進行飛行,不需經過林地、草場,安全系數100% ,平均配送時間為34 min,效率對比人工配送提高43% ;圖5(b)為無人機沿著目標點與配送點的直線距離進行飛行,該方法雖然平均配送時間最短為15 min,效率對比人工配送提高75% ,但是傳統算法不能跟隨地形變化而動態改變相對高度,一般采取相對起飛點400 m 的高度進行配送以避讓障礙,并且該方法為純直線配送,忽視了配送線路上經過的樹林(F),存在墜機進而導致山火的風險,安全系數為76% 。
為此,本文通過效率和安全系數作為評價指標,開展基于A* 算法的路徑規劃,以提高配送效率。其中,安全系數Rs 為飛躍樹林和草場等可能引起山火的時間占比,定義如下:
Rs =( t - t′/t) × 100% , (11)
式中:t 為飛行的時長、t′為在山火隱患區飛行時長。
2. 2 跳點式路徑規劃模型驗證
針對當前常用的2 種無人機配送路徑規劃方法的不足,本文采用基于改進A* 算法的無人機動態路徑規劃。根據本文所設立場景,即西南山區,無人機航行區域除人口密集處外,主要為草場與林地。其中,林地需在旱季考慮無人機墜落導致的山火風險,而潮濕度較高的雨季則無需考慮該情況。
針對草場與林地地區,本文所設計路徑規劃系統在雨季與旱季的時節條件下所規劃路徑如圖6 所示。配送方式效果對比如表1 所示。雨季時,本文模型利用式(3)和式(4)不僅避開了樹林(F),而且計算出當前草場(S)具備跨越條件,于是在樹林與草場過渡點進行跳躍,實現平均配送時間20 min、效率對比人工配送提高66. 7% 的同時,安全系數達到100% ;冬季時,本文模型利用式(3)和式(4)不僅避開了樹林(F),而且計算出當前草場(S)不具備跨越條件,在飛過草場具備跳躍條件時,再進行跳躍,實現平均配送時間26 min、效率對比人工配送提高57% ,同時安全系數達到100% 。
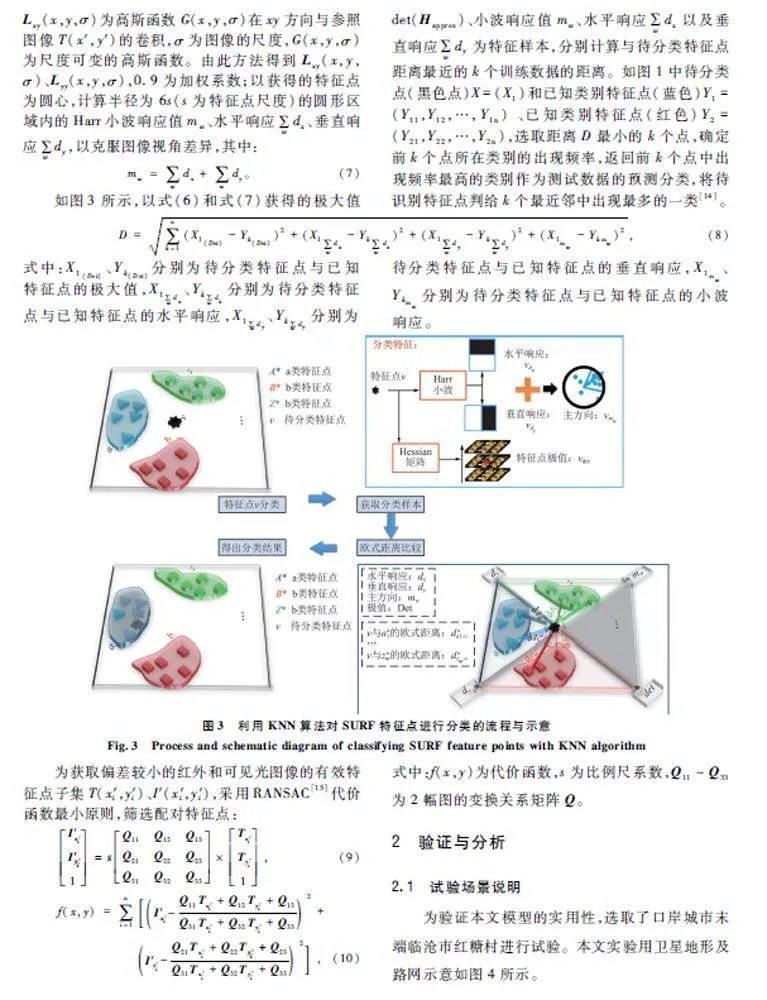
2. 3 目的地識別驗證與比較
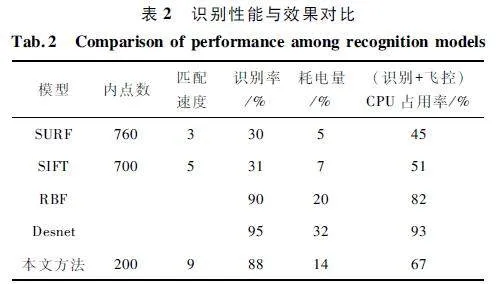
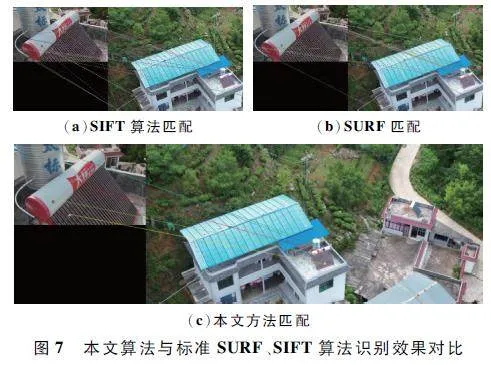
由于所處區域房屋在外形構造、墻面造型與顏色等多方面存在相似性,針對無人機需準確識別貨物投送位置的問題,本文采取了“模板-識別”的方式實現有效定位。客戶將依照一定要求拍攝卸貨地點,無人機根據用戶預存照片開展匹配識別,實驗結果如圖7 所示,不同算法在實現圖像匹配的效果對比情況如表2 所示。
對比傳統SURF 與SIFT 算法,由于本文采取了特征點分類的處理方式,雖然形成的特征點較少,匹配速度較SURF 低66% 、較SIFT 低43% ,同時CPU占用率更高,但是在相似物體、背景干擾等復雜情況下,本文方法匹配準確率有了大幅度提升,較SURF提高了55% 、SIFT 提高了59% 。
由表2 可以看出,本文所改進的SURF 算法兼顧了識別準確率與功耗問題,盡管準確率較RBF 低2% 、較Desnet 低7% ,為88% ,但功耗較RBF 低8% 、較Desnet 低16% ,CPU 占用率較RBF 低15% 、較Desnet 低26% 。此外,改進的模板SURF 算法無需訓練,在物流配送中實用性更強。
3 結束語
當前,物流行業利用無人機執行“最后一公里”場景下的配送任務,以進一步提高配送時效,在一定程度下已經成為共識。但在實際作業過程中,無人機多采用通用型系統,沒有針對不同地區采取差異化設計。針對此種情況,本文以西南地區口岸城市末端為應用場景,針對地形地貌復雜、既有道路曲折、路徑區間內需避讓障礙物分布較多的特點,提出一種兼顧飛行安全與效率的“跳點”式A* 算法開展飛行線路路徑規劃,該方法以既有道路為基本方案、以林地與草地為環境障礙,開展基于效率和安全系數為約束的路徑規劃。同時,針對目的地區域樓棟相似度較高,以及飛行角度與照片模板角度往往差異較大的情況,提出采用“模板+SRUF”算法的圖像配準手段,從而實現準確定位卸貨位置。
根據實際場景的驗證情況,本文路徑規劃算法兼顧效率與安全,實現了在安全系數100% 條件下配送效率的提高,實現了在功耗僅為15% 左右條件下目的地識別準確率達到88% 的效果。對比已有的物流無人機系統,本文所設計系統在山區這一特定場景下的配送效率與功耗具備較為明顯的優勢。后續工作中,將在本文基礎上考慮集群物流無人機系統的設計,以進一步提供及時的配送服務。
參考文獻
[1] DORLING K,HEINRICHS J,MESSIER G G,et,al.Vehicle Routing Problems for Drone Delivery [J]. IEEE Transactions on Systems,Man,and Cybernetics:Systems,2017,47(1):70-85.
[2] 張啟錢,許衛衛,張洪海,等. 復雜低空物流無人機路徑規劃[J]. 北京航空航天大學學報,2020,46 (7):1275-1286.
[3] 周浪. 農村電商物流配送“配送車+無人機”路徑優化研究[D]. 武漢:武漢理工大學,2017.
[4] 郭興海,計明軍,溫都蘇,等. “最后一公里”配送的分布式多無人機的任務分配和路徑規劃[J]. 系統工程理論與實踐,2021,41(4):946-961.
[5] TORABBEIGI M,LIM G J,KIM S J,et,al. Drone DeliveryScheduling Optimization Considering PayloadinducedBattery Consumption Rates [J]. Journal of Intelligent &Robotic Systems,2020,97(3):471-487.
[6] 陳存糧. 無人機末端物流配送算法研究[D]. 西安:西安電子科技大學,2021.
[7] 張洪海,任真蘋,馮謳歌,等. 城市低空物流無人機飛行計劃預先調配[J]. 系統工程與電子技術,2023,45(9):2802-2811.
[8] 蔣麗,楊露,梁昌勇,等. 基于無人機的高層住宅最后“一百米”配送優化[J]. 交通運輸系統工程與信息,2022,22(4):236-245.
[9] 李姍,張洪海,劉?. 基于改進元胞自動機算法的物流無人機航路規劃[J / OL]. 華中科技大學學報(自然科學版):1-7[2023-08-10]. https:∥doi. org / 10. 13245 /j. hust. 238475.
[10] 劉光才,馬寅松,齊福強,等. 基于改進A* -人工勢場法的城市物流無人機路徑規劃[J]. 飛行力學,2022,40(6):16-23.
[11] BEISHENALIEVA A,YOO S J. Multiobjective 3D UAVMovement Planning in Wireless Sensor Networks UsingBioinspired Swarm Intelligence [J ]. IEEE Internet ofThings Journal,2023,10(9):8096-8110.
[12] LI D C,YIN W P,WONG W E,et,al. QualityorientedHybrid Path Planning Based on A* and Qlearning forUnmanned Aerial Vehicle [J]. IEEE Access,2022,10:7664-7674.
[13] FU J Y,SUN G H,YAO W R,et,al. On Trajectory Homotopy to Explore and Penetrate Dynamically of MultiUAV[J]. IEEE Transactions on Intelligent Transportation Systems,2022,23(12):24008-24019.
[14] 崔昊楊,周坤,張宇,等. 電力設備多光譜圖像融合及多參量影響的故障漸變規律演化預測研究[J]. 電網技術,2021,45(1):115-125.
[15] 陳賢兒,梁丹,傅云龍,等. Harris 與SURF 特征點檢測的手術器械機器視覺識別方法[J]. 傳感器與微系統,2023,42(2):118-121.
[16] 高玉潼,雷為民,原癑. 復雜環境下基于聚類分析的人臉目標識別[J]. 計算機科學,2020,47(7):111-117.
[17] 王國杰,胡一凡,張森,等. 深度卷積神經網絡的遙感〗影像水體識別[J]. 遙感學報,2022,26(11):2304 -2316.
[18] ADEKANMI A A,SERESTINA V. FCNbased DenseNetFramework for Automated Detection and Classification ofSkin Lesions in Dermoscopy Images [J]. IEEE Access,2020,8:150377-150396.
作者簡介
楊 曉 女,(1993—),碩士,講師。主要研究方向:口岸物流、物流管理。
(*通信作者)姚 敏 男,(1979—),碩士,副教授。主要研究方向:區域經濟及管理。
基金項目:云南省科技廳科技計劃項目(202101BA070001-006);云南省哲學社會科學規劃項目(QN202218)
