2D激光雷達室內平面數據預處理方法研究
2024-09-19 00:00:00賴振彬李昱江李洋帥海樂楊垣
現代信息科技 2024年13期

摘 要:采用2D激光雷達對建筑房間進行掃描測量時,激光雷達點云將會受到噪聲、離群躍變點和數據缺失等因素的干擾,影響點云數據的處理速度。為提高2D激光雷達點云數據處理速度和建筑房間平面繪制精度,采用差值濾波法、最小二乘法等算法以及動態閾值特征提取法實現了2D激光雷達點云數據的預處理。通過試驗對點云數據預處理方法進行了驗證,結果表明,2D激光雷達可以快速獲取門、窗、梁、柱的尺寸信息,能夠顯著提升建筑空間的測量精度和平面圖繪制效率。
關鍵詞:激光點云;離散;濾波;差值;平面繪制
中圖分類號:TP391 文獻標識碼:A 文章編號:2096-4706(2024)13-0125-04
Research on 2D Laser Radar Indoor Planar Data Preprocessing Methods
LAI Zhenbin, LI Yujiang, LI Yang, SHUAI Haile, YANG Yuan
(Guizhou Construction Science Research and Design Institute Co., Ltd. of CSCEC, Guiyang 550006, China)
Abstracts: When 2D LiDAR is used to scan and measure the building room, the LiDAR point cloud will be interfered by noise, outlier jump points and missing data, which will affect the processing speed of the point cloud data. In order to improve the processing speed of 2D LiDAR point cloud data and the accuracy of building room planar drawing, the algorithms such as difference filtering method, least squares method and dynamic threshold feature extraction method are used to realize the preprocessing of 2D LiDAR point cloud data. The point cloud data preprocessing method is verified through experiments, and the results show that 2D LiDAR can quickly obtain the dimensional information of doors, windows, beams, and columns, and can significantly improve the measurement accuracy of architectural space and the efficiency of planar drawing.
Keywords: laser point cloud; discrete; filtering; difference; planar drawing
0 引 言
隨著城市建設步伐的不斷加快,越來越多的老舊建筑被納入更新改造的計劃中,老舊建筑因使用年限長、使用過程中發生功能改動以及運維不當等因素存在實際布局與原始圖紙資料不符,或者是圖紙在傳遞過程中有丟失情況的發生,想要獲取老舊建筑詳盡的平面圖和通過逆向建模來驗算老舊建筑的安全性能,必須對老舊建筑的實際情況進行測量。激光雷達測距技術的發展為三維空間數據的獲取提供一種全新的技術方法,可用于快速精準獲取物體二維或三維數據,同時實現目標物體或場景的三維重建[1]。激光掃描快速采集數據的特點推動了其在線測量技術在工程應用中的快速發展,室內的三維測量可借助激光雷達來實現,完美體現了室內三維測量在裝修公司、房地產業、室內地圖等[2-3]領域的應用價值,基于光學儀器傾斜攝影或激光雷達采集數據并精細處理計算的深度學習三維重建已成為主流的三維重建技術[4]。激光雷達掃描測量裝置是獲取建筑尺寸、構件位姿等信息的技術手段,可分為多線激光雷達和單線激光雷達,兩者的測量精度旗鼓相當。目前常用的激光雷達傳感器有二維和三維兩種[5],三維激光雷達傳感器的掃描效率和精度高、細節描述清晰、信息含量豐富,但其在掃描過程中通常需要加設基準站點以保證后續點云數據的內業拼接質量,點云數據量巨大,需要由專業技術人員來處理且過程煩瑣。二維激光掃描以激光發射器為原點,以固定頻率向外360°發射激光來獲取遮擋物的距離數據,是獲取空間平面信息的有效手段,但其仍然存在著噪聲、離散化誤差等問題[6]。二維激光掃描采集的點云存在大量的噪聲,不僅降低了數據處理設備的處理速度,更是增加了后期模型的構建難度并降低了模型精度。針對二維激光雷達在對建筑進行掃描測量中因門窗洞口、桌柜等遮擋物而產生的大量點云噪聲影響建筑建模精度和效率的問題,本文提出一種差值濾波方法,對二維點云數據進行預處理,提高二維點云數據的準確度。
1 二維點云數據的獲取
1.1 點云數據采集設備
點云數據是逆向建筑逆向建模的核心[7],本文采用移動式二維激光雷達作為點云數據的采集設備。二維激光掃描儀的優點有結構簡單、成本低、受光照因素影響較小和測距精度高[8]。通過設置外圍供電電路和數據采集電路,通過串口通信采集數據將其回傳主控芯片并通過Wi-Fi將數據傳輸至移動端,在移動端對點云數據和方位角度數據進行粗加工處理后自動繪制被掃描物體的輪廓線,經過相應簡易操作后予以展示和存儲。
1.2 點云數據獲取方案
單線激光雷達每次掃描能夠獲取一個掃描平面的深度信息[9],建筑房間是由三面以上墻體首尾相連形成相對封閉的空間,在激光雷達掃描測量過程中每面墻體都可以被看成一個測量段。當房間內無桌子、柜子、空調等遮擋物遮擋墻面時,激光雷達旋轉(順時針旋轉)環切掃描測量過程中,每個測量段的測量距離具有周期變化性,其周期性可以分為以下幾種情況:
1)如果掃描起點激光反射點對齊四個墻角之一即任意一個測量段的一端,則該測量段的測量距離由大變小,當掃描點激光與測量墻體和激光器鉛垂線重合時測量值到達當前掃描的極小值,隨后逐步增大,第一次到達該測量墻體另一端點時,測量值達到極大值點,隨后再次減小,直至完成一周掃描測量。其測量值變化規律為:起始值—減小—極小值—增大—極大值,如此循環往復直至房間四面墻體全部掃描完畢。
2)當掃描起點激光以垂直于四面墻體中的任一墻體開始測量時,其測量值變化規律為:極小值—增大—極大值—減小—極小值。
3)當掃描起點位于任一墻體任一位置(非墻角處、非垂直墻面處)時,測量值有兩種情況:一是起始值—增大—極大值—減小—極小值—增大—極大值;二是起始值—減小—極小值—增大—極大值—減小—極小值,如此循環往復,直至掃描測量一圈。
三種掃描測量方式的共同點是,掃描測量一圈均會出現4次極大值和4次極小值,4次測量極大值分別對應的測量點是房間內的四個墻角,4次測量極小值分別對應的測量點是設備放置點與墻面的鉛錘點處。由此可以得出結論,在掃描房間內無桌子、柜子等遮擋物的情況下,掃描測量值不會產生大的躍變。
通過以上掃描方式的選擇可以得到夾帶許多噪點的建筑房間平面點云數據,此點云數據需要經過過濾和清洗才能用于房間建模中。
2 點云噪聲濾波算法
2.1 點云噪點的產生
激光雷達是通過向外發射激光信號并接收反射回來的激光信號來測量物體距離的,因此在獲取點云數據時,由于受到外界干擾(如視線遮擋、障礙物等因素)的影響,點云數據中存在一些距離主題點云較遠的離散點,即離散群點。在室內進行測量時,由于房間內有桌子、書柜等家具,梁柱等結構構件以及門窗洞口等開口的存在,測量距離的差異會使激光雷達點云產生躍變,導致激光雷達點云凹凸不平。在玻璃環境中,激光雷達發出的光絕大部分透過玻璃而無法返回被接收,所以盡管透明玻璃是平面的,在激光雷達掃描的點云圖中顯示的卻只是很小的一團點云,其特征與周圍的噪聲點云類似[10]。為提高激光雷達點云質量,需要研究激光雷達點云濾波算法,去除無用的噪聲點。
2.2 點云濾波算法
2.2.1 掃描離群躍變點云降噪-差值濾波法
根據激光雷達在無障礙物及玻璃洞口的一般規則的封閉空間掃描測量值不會產生躍變這一原則,設置一定的閾值如當前點N與其前(N-1)后(N+1)各一個點共計3個點進行兩兩差值比較,當其滿足L(N)-L(N-2)、L(N) - L(N-1)、L(N+1) - L(N)、L(N+1) - L(N-1)、L(N+2) - L(N)點差值大于A時,刪除第N點,隨后將第N + 1點和第N + 2點做比較,循環作差值比較直至所比較的第N + M個點云與第N個點云的差值小于等于A,利用第N + M個點云和后面的點云逐一進行作差與設定閾值比較,直至所有點云完成一輪比較,刪除滿足條件的離散躍變點云。利用上述算法可以去除玻璃洞口等部分的離群躍變點云,完成二維激光雷達環切掃描測量所得到的所有點云數據進行的第一步清洗處理,再進行更深程度的濾波。
2.2.2 連續點云的濾波
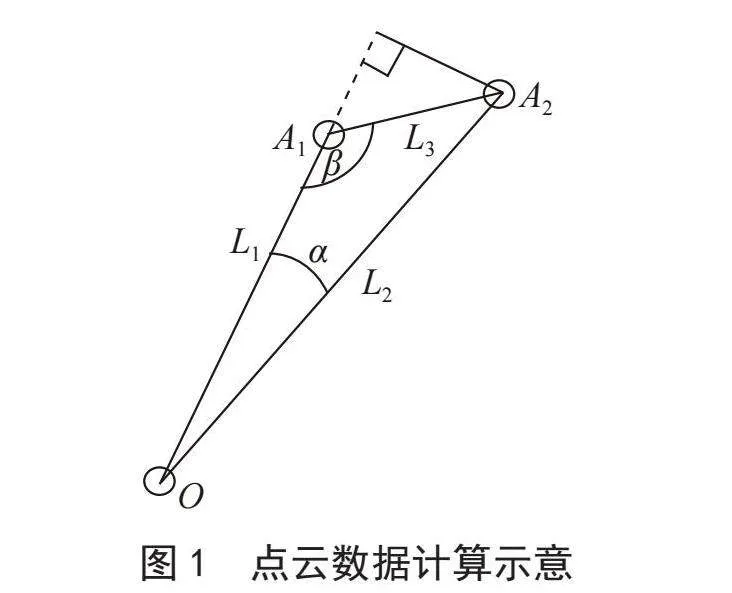
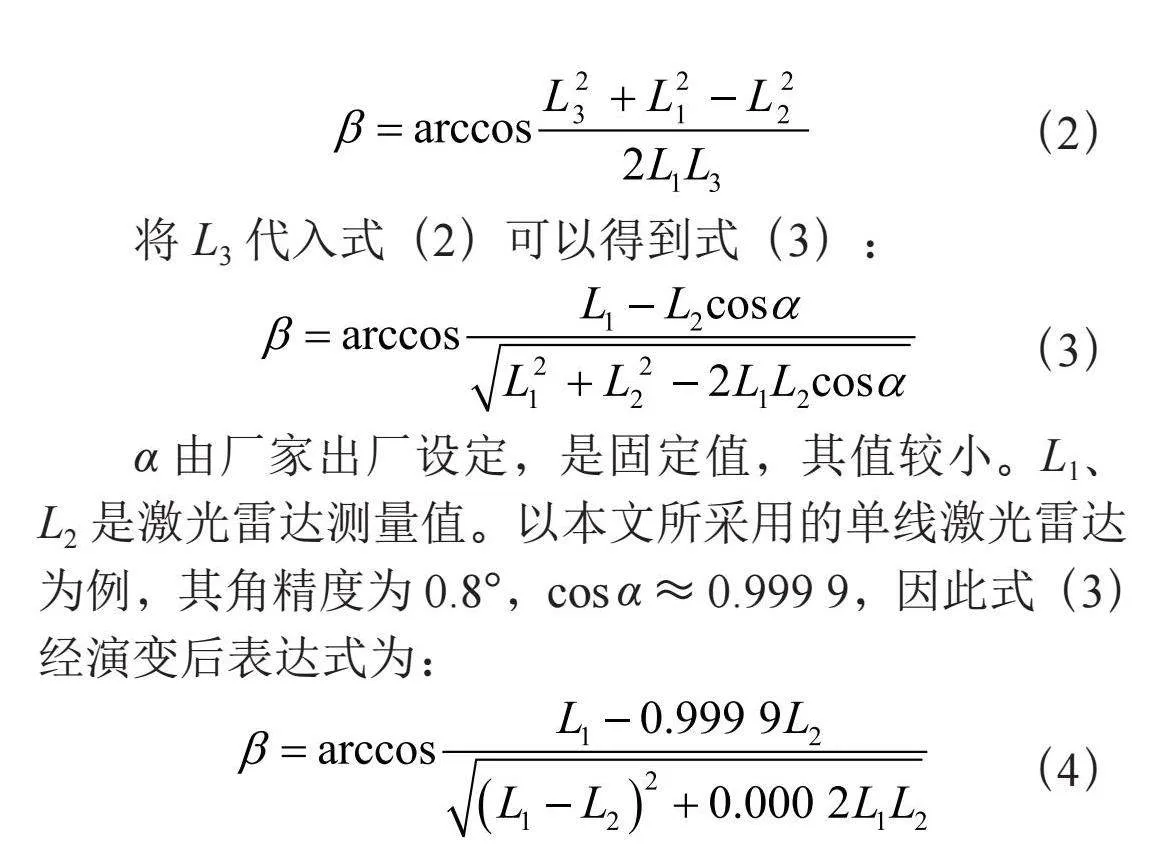
如圖1所示,激光雷達激光發射點為O,激光雷達的角分辨率為α,是激光雷達固有參數,由激光雷達廠家出廠設定,不可更改。對于任意連續的兩點A1、A2,則有A1、A2點到發電點O的距離為L1和L2,因為L1和L2的起點都是激光發射點O且兩點是連續的,所以,L1和L2兩條線形成的夾角為激光雷達的角分辨率α,A1點到A2點的直線距離L3可由余弦定理式(1)求出。L1和L3之間的夾角β可由式(2)求出:
將L3代入式(2)可以得到式(3):
α由廠家出廠設定,是固定值,其值較小。L1、L2是激光雷達測量值。以本文所采用的單線激光雷達為例,其角精度為0.8°,cos α≈0.999 9,因此式(3)經演變后表達式為:
由式(4)可以看出,當L2的值比L1大時,β角大于90°,當L2的值比L1小時,β角小于90°。
當測量的是一面連續且在物體和雷達中間無障礙物體時,由于激光雷達為旋轉式和雷達精度的制約,后測量點A2到發射點的距離L2比前測量點A1到發射點的距離L1的大小差異不會很大,利用此關系經計算可以得到線段L1和線段L3之間夾角β的大小。在忽略雷達誤差精度的基礎上,線段L1和線段L3之間的夾角β應該在(90 - α~90 + α)之間:
假設由于雷達精度導致的角度誤差為γ,那么β角會由(90 - α~90 + α)之間變為(90 - α ± γ~90 + α ± γ)之間。在點云濾波算法上設置一定的閾值γ(γ可根據實際情況進行調整),當β值大于(90 - α + γ)或小于(90 - α - γ)時,認為該點云是離散點云,可以將其消除。當β值在(90 - α - γ)和(90 - α + γ)之間時,認為該點云與其前序點云是連續點云,保留該點云進入下一矯正步驟。
上述濾波方法可以用于無梁柱、桌子、柜子等遮擋物房間掃描點云的濾波,當房間內有梁柱、桌子、柜子等遮擋物時,需要考慮遮擋物對距離測量的影響。當有突出遮擋物或凹進開槽且凹/凸物體寬度較大時,除了需要計算對比躍變點與前序點的β角是否在(90 - α + γ)區間,還需要計算對比躍變點與其后續一定范圍內點云之間的β角是否在(90 - α + γ)區間,此時可以設置躍變點及其后續點與其前序點需要逐一計算對比的點云范圍。遇到突變點時,往后計算對比10個點云數,當計算得到的10個點云的β角都在(90 - α ± γ)區間時,則判定為凹/凸物體,繼續往后計算β角直至遇到下一個突變點,重復以上操作。
3 試驗結果與分析
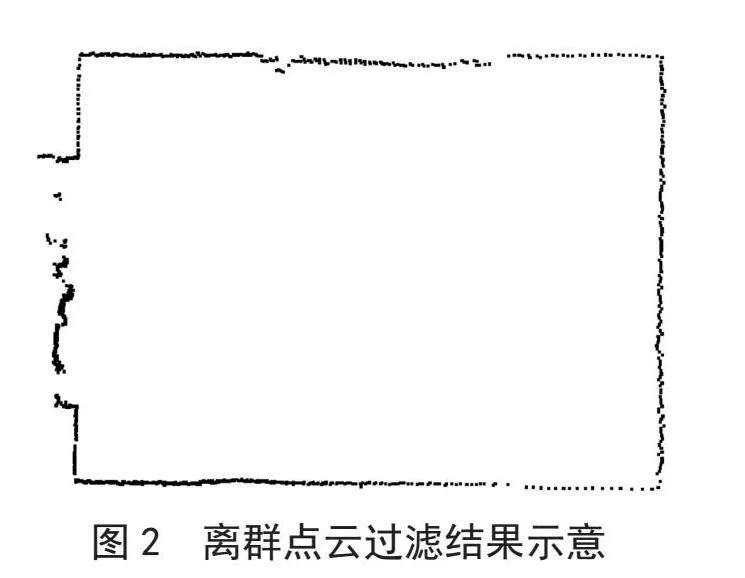
為檢驗上述濾波方法的可行新,采用樂動機器人生產的LD19型激光雷達傳感器作為點云數據的采集傳感器。該傳感器采用左手坐標系、旋轉中心作為坐標原點,正前方定義為零度方向,旋轉角度沿著順時針方向不斷增大,如圖2所示。采用激光雷達在某一房間內掃描測量所得到的原始點云數據。
該雷達轉速穩定在10 ± 0.1 Hz,其角精度為0.8°。在進行掃描測量驗證時,使用產品自帶的可直觀觀察掃描效果圖的實時掃描點云可視化軟件LdsPointCloudViewer,對比分析LD19激光原始點云及經過本文噪點濾波算法后的點云,并在電腦端實時顯示。
3.1 躍變離群點云濾波
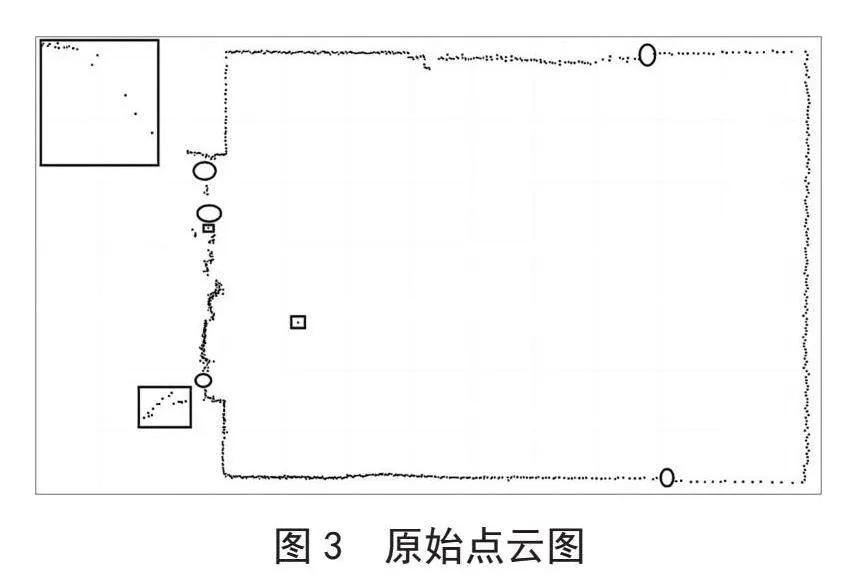
室內無桌子、柜子等遮擋物的環境下,利用激光雷達掃描測量系統采集5 m×4 m的辦公室進行掃描測量試驗,如圖3所示為采集到的該辦公室的原始點云數據,從圖中可以看出由于玻璃的因素,點云數據不僅出現較大部分的離群躍變點,如圖中方框所示;還出現了較大的缺失,如圖中圓圈所示。利用激光雷達在同一平面掃描測量時點云數據不會發生躍變的規律,通過差值濾波法對原始點云數據進行濾波平滑處理,第一步去除躍變離群點云如圖3所示,可以看到窗戶外的點云已基本被去除,余下基本可以描述房間內部的基本概況。
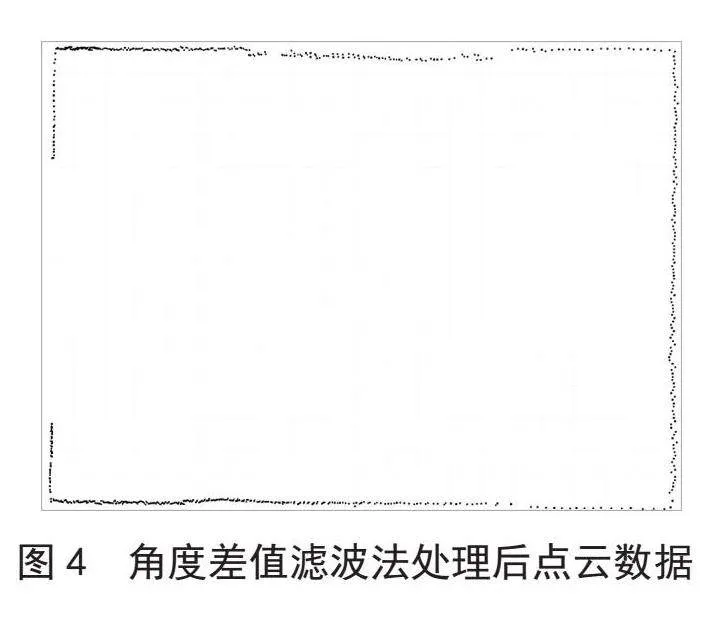
3.2 連續點云濾波
采用差值濾波法對原始點云進行濾波后,剩余點云仍會有較多的噪點,需要采用更精細的濾波算法對點云進行平滑處理。為實現對房間內特征點的提取,對濾波后的點云數據進行最小二乘法再次濾波,二次濾波得到的點云圖如圖4所示,進一步采用最小線框將二次濾波點云包裹住,結果如圖5所示。
4 結 論
本文利用角度差值法對采集到的二維激光雷達點云數據中的噪點去除算法進行了設計研究,并在某建筑內幾種環境類型的房間中進行了試驗,驗證了角度差值去除點云噪聲的有效性。結果表明,所提出的角度差值算法能夠有效過濾二維激光雷達點云數據中的躍變離群點云,經過濾波后的點云數據能夠較為完整地保留房間內部結構的大致平面圖,在精簡點云的同時提高了點云質量。
參考文獻:
[1] 王曾蘭.基于二維激光雷達數據的三維重建研究 [D].沈陽:東北大學,2013.
[2] 劉昶,姜楠,賈峻權,等.單軸轉臺上2D激光雷達的位姿估計 [J].電子測量與儀器學報,2023,37(1):87-95.
[3] 易耀華.基于2D單線激光雷達室內三維測量技術研究 [D].西安:西安工業大學,2021.
[4] 李安琪,鄭艷,王博,等.基于3D點云深度學習上采樣的建筑物精細化三維重建 [J].現代信息科技,2023,7(21):136-139+144.
[5] 黨敬民,翟冰,高宗麗,等.納秒級脈沖型群紅外量子級聯激光器驅動電源 [J].光學精密工程,2013,21(9):2209-2216.
[6] 謝翔,杜年春,沈向前.不同濾波方法對二維激光雷達點云數據處理的影響 [J].地塊測繪,2021,37(1):13-16.
[7] 伍根,熊小龍.基于三維激光掃描測繪技術的BIM逆向建筑建模方法研究 [J].城市測繪,2023(5):33-37.
[8] 張新榮,王鑫,王瑤,等.基于轉動式二維激光掃描儀和多傳感器的三維重建方法[J].中國光學:中英文,2023,16(3):663-672.
[9] 劉昶,姜楠,賈峻權,等.單軸轉臺上2D激光雷達的位姿估計 [J].電子測量與儀器學報,2023,37(1):87-95.
[10] 陳浩.基于激光雷達的室內玻璃三維重建算法 [J].信息通信,2019,198(6):44-46.
作者簡介:賴振彬(1987—),男,漢族,廣西陸川人,高級工程師,本科,研究方向:嵌入式系統設計開發、智慧測量;通訊作者:楊垣(1983—),男,苗族,貴州晴隆人,研究方向:建筑設計、建筑節能技術研究、綠色建筑方案設計及咨詢、建筑節能設計、建筑工程設計、綠色建造、智慧建造等。