無源定位技術發展及其展望
2024-09-16 00:00:00李俊霞王欣黃高見徐勇軍郝萬明朱政宇李興旺
無線電工程 2024年8期
關鍵詞:深度學習

關鍵詞:無源定位;智能反射面;環境反向散射;通感一體化;深度學習
0引言
物聯網(Internet of Things,IoT)已被學術界和工業界公認為未來無線網絡的重要組成部分,智慧工業、智能交通和智能健康等應用將成為未來無線網絡中快速增長的領域;隨著分布在室內、城市、工廠和偏遠農村等智能設備的爆炸式增長和超大規模連接,IoT在感知方面面臨著極大挑戰。而由無線通信支撐的無源定位技術有望成為解決未來無線網絡感知問題的關鍵技術。近年來,無源定位方法層出不窮,相比于傳統有源定位技術,無源定位技術具有低功耗、低成本、隱蔽性好、抗干擾強等優勢,已成為世界各國學者研究的熱點。
在這種背景下,需要深入探討無源定位技術的原理和應用,以應對日益增長的定位需求。信號在空間傳播過程中會遇到各種遮擋出現反射、衍射和折射等現象,無源定位則是根據這種現象通過接收已存在的空間電磁波反射信號進行定位,不需要專用信號源發射信號。早期對無源定位技術的研究主要集中在不同定位方案下的參數估計。基于參數信息的不同,無源定位可分為單參數定位和多參數融合定位,這些技術完全依賴于參數估計的準確性,且無論單參數定位還是多參數融合定位在低信噪比下都具有較大的定位誤差,相較于定位需求,穩定性、魯棒性更差。因此,尋求一種在低信噪比條件下具有高精度無源定位技術的方法迫在眉睫。
隨著第五代移動通信系統(The Fifth-GenerationMobile Communication System,5G)已步人商業化,通信領域已經開始期待第六代移動通信(The Sixth-Generation Mobile Communication,6G)時代的到來,如2019年蘭奧盧大學發布全球第一部6G白皮書,貝爾實驗室在2021年研發出印刷毫米波調制和天線陣列,國內以華為、中興為代表的設備廠商同樣積極推動6G產業鏈的發展與產品落地,其中智能超表面(Reconfigurable Intelligent Surface,RIS)、通感一體化(Integrated Sensing and Commu-nication,ISAC)及零功耗環境反向散射通信(Am-bient Backscatter Communication,AmBC)等技術作為6G主要研究內容,不僅可以提供無處不在的通信,還可以為無源定位提供強有力的技術支撐,朝著更高速率、更低時延、萬物互聯邁近,由此將帶來更加穩定、精度更高的感知服務;6G終將成為這場革命的催化劑,帶來一種獨特的通信新功能和感知服務能力。
本文首先簡要介紹無源定位與有源定位的區別及各自特點,并對無源定位進行分類;其次主要圍繞近年來對無源定位技術的研究進行綜述,總結無源定位技術的理論與方案,指出目前定位技術中所存在的問題;最后討論無源定位中新興的定位技術,并展望無源定位更廣闊的應用場景以及未來發展趨勢和面臨挑戰。
1無源定位特點與分類
1.1無源定位特點
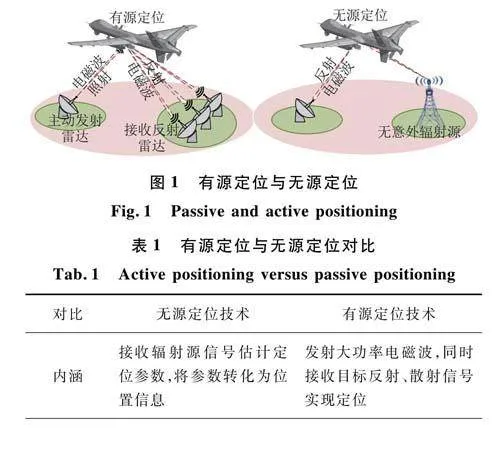
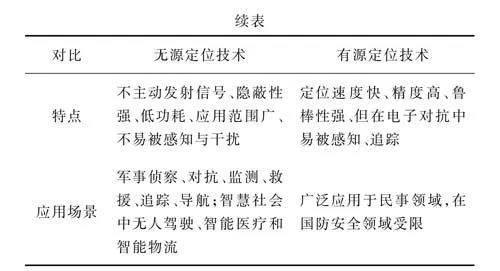
無源定位系統不主動發射電磁波,而是通過接收目標輻射的電磁信號或周圍信號源反射的信號來進行定位,利用其內部信號處理系統估計定位參數。因此,無源定位可以分為自輻射信號無源定位與外輻射信號無源定位。相比于有源定位而言,無源定位技術具有低功耗、不易被干擾、隱蔽性強等優點,廣泛應用于航天航空、電子偵察、電子對抗、民用監測、無人駕駛、智能醫療和智能物流等領域。在國防安全領域,電子對抗技術在現代戰爭中的地位和作用日益凸顯,而無源定位作為電子戰的主要對抗技術之一,在反隱身、反預警、反偵察、追蹤、導航和監測等室外定位方面的作用更是不可替代。在智慧城市建設領域,定位技術是智能家居、智能醫療和智能倉儲等發展的必要條件,而隨著無線設備密度和移動性的增加,未來網絡對低復雜度、高精度和高魯棒性的定位與跟蹤技術提出了更高的要求。無源定位與有源定位如圖1所示,表1總結了無源定位與有源定位的特點和應用場景。
無源定位相比有源定位有著諸多優勢,且在室內、密集城市和自動駕駛等領域具有廣闊的應用前景,因此本文把無源定位作為主要研究內容,具有重要的理論意義和應用價值。
1.2無源定位分類
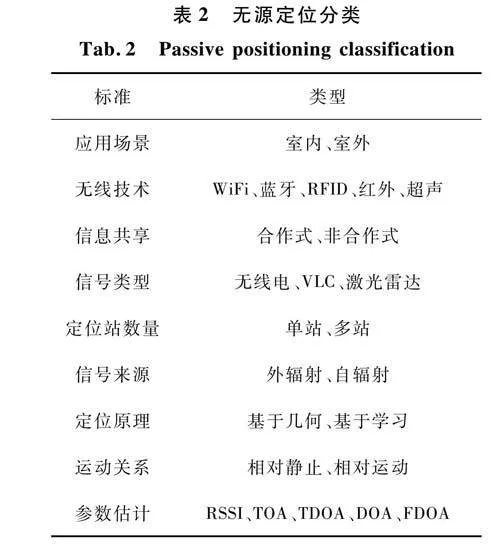
無源定位問題可以簡單歸結為具有已知位置和方向信息的一個或多個基站協助下目標位置和方向的估計。在各種的應用系統中,如蜂窩網絡(ZigBee)、射頻識另|J(Radio-Frequency Identification,RFID)系統和可見光(Visible Light Communication,VLC)系統等,已開發出多種定位方法。這些定位方法可以根據應用場景、無線技術、定位參數信息、信號處理類型、定位步驟和系統結構等進行分類。無源定位分類方式與類型如表2所示。由于不同的分類方式可能相互結合,因此下面簡要介紹4種分類方式下無源定位技術的方法與特點。
1.2.1基于定位步驟分類
估計輻射源位置需要進行信號截獲、通過數據處理獲得定位參數信息,這些信息通常包括接收信號強度值(Received Signal Strength Indicator,RSSI)、到達角(Direction of Arrival,DOA)、到達時間(Timeof Arrival.TOA)、到達時間差(Time Difference of Ar-rival,TDOA)和到達頻差(Frequency Difference ofArrival,FDOA)等,之后利用參數信息結合幾何關系解出目標位置,被稱為幾何定位法或兩步定位。
與之對應的是基于學習的方法,基于學習的方法是指將上述過程進行融合,通過截獲信號構建代價函數,通過優化方法不斷降低定位誤差,即一步定位法。相比于基于幾何定位方法,該方法無需估計定位參數,而是利用信號中有關輻射源位置信息構建僅與位置有關的目標函數,通過窮盡搜索、凸優化、壓縮感知、深度學習及神經網絡等方法不斷減小定位誤差,獲得定位位置。
1.2.2基于定位站數量與運動關系分類
無源定位按照定位站的數量可以分為單站無源定位與多站協同無源定位。單站定位設備單次僅接收目標發射的直達波,沒有回波反射過程,擁有比雷達更遠的探測距離,使定位系統能夠比雷達更早發現目標。單個設備雖然靈活性好,無需設備間同步而且探測能力強,但限制了定位精度,單臺定位設備由于負載資源容量有限,已無法滿足實時定位與追蹤需求,同時單站定位的模型可觀測性差,導致噪聲差異和初始條件誤差較大等因素引起定位精度低、收斂速度慢,有時更可能出現估計的定位結果發散等情況。
通常情況下當目標處于靜止狀態時,單站定位系統只獲取輻射源目標位置的方向參數,而無法測量距離信息。當目標處于運動狀態時,如衛星、飛機等運動速度很快的物體,可在短時間內移動到相差距離較大的位置,此時單個定位站可在短時間內接收到來自不同位置的輻射源信號進行定位;但如果目標運動速度較慢,較短時間內沒有較大距離移動,則需要多站協同實現定位。
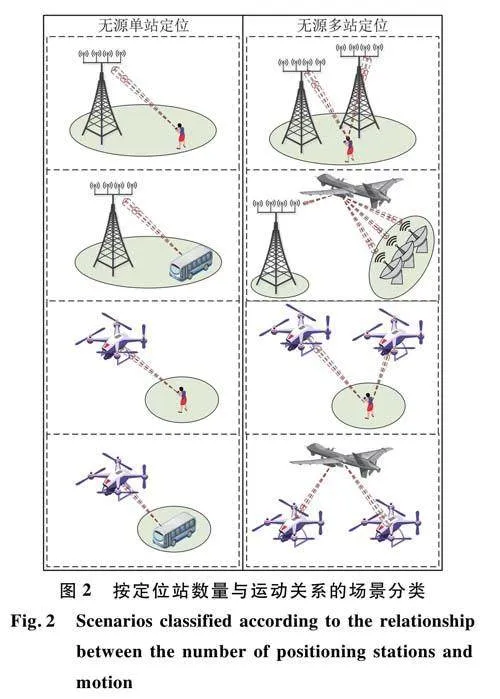
在多站協同定位中,除了信息互通共享外,還需要注意定位站之間工作時段和頻段的同步,以確保定位結果的準確性。多站協同除了確保定位結果準確,還可以提高定位精度。此外,值得注意的是,多站無源定位系統需要觀測站之間的同步和大量數據傳輸。除此之外,還需要對集中式數據進行整合,這不僅增加了系統的復雜性,而且降低了系統的獨立性和移動性。按定位站數量與運動關系的場景分類如圖2所示。
1.2.3基于信號類型分類
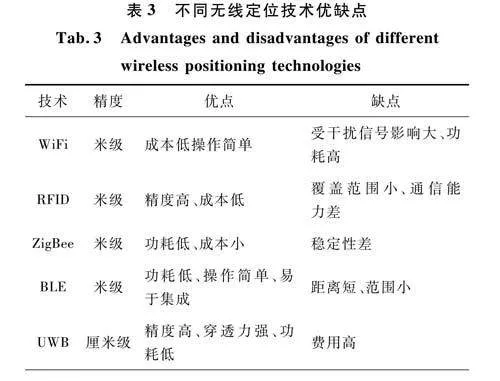
無源定位通常采用環境中的信號進行定位,因此依靠環境信號對定位技術進行分類主要有WiFi定位、低功耗藍牙(Bluetooth Low Energy,BLE)定位、RFID定位、VLC定位、紅外定位、超寬帶(Ultra Wide Band,UWB)定位等。大多數定位技術都需要一些額外的硬件輔助設備,在定位階段,通過對移動終端接收到的信號進行分析,可以得到終端的位置信息。表3對不同無線定位技術的精度和優缺點進行了總結。
1.3定位分類總結
綜上所述,根據信號輻射來源,無源定位系統可分為自輻射信號無源定位與外輻射信號無源定位;根據是否需要協同工作可以分為單站定位與多站協同定位;同時可以按照目標與定位站的相互運動關系來分,有相對靜止與相對運動;亦可按照定位站與輻射源所處空間分為陸地和機載定位,還有室內外的分類方法。總之,不同的分類方法對應不同的應用場景,因此需要根據具體情況選擇適當的定位算法,但無論在哪種場景下定位都需要參數信息來求解目標位置,因此本文主要按照求解步驟的分類方式對各種參數定位技術進行討論,也符合諸多學者有關定位技術研究的現狀。
2基于單參數的無源定位
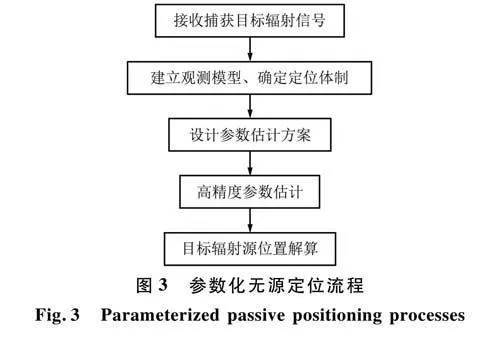
定位最主要的目的是找到輻射源位置,對于參數化定位技術即分步定位法,想要精準確定輻射源位置,最重要的是使用恰當的定位方法估計所需參數,故參數化無源定位流程如圖3所示。
參數估計是影響定位性能最關鍵的步驟,因此選擇合適的定位技術減少參數估計誤差,在估計出參數之后利用參數信息及觀測站與輻射源的幾何關系解出目標位置。本節主要圍繞單參數下的無源定位技術總結兩步無源定位在不同場景下的原理、特點、發展狀況及誤差影響因素。
2.1基于RSSI無源定位
RSSI是目前最流行、最簡單的定位法之一,主要原因是RSSI無源定位無需額外的硬件來實現,使得在實際應用中更加方便經濟,且可以在任何設備上使用幾乎任何類型的無線通信技術。
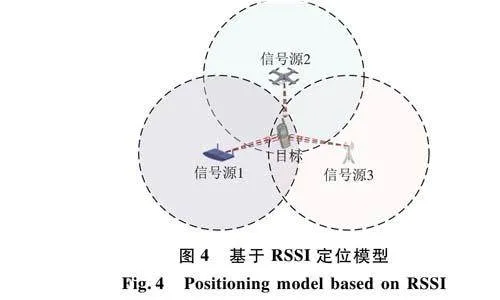
RSSI為接收機收到無線電磁波信號的強度或功率。RSSI定位技術是基于接收信號強度與距離成反比的原理實時判斷設備位置信息,需要環境中存在一定數量的信號源,可以是無線路由器、基站或者其他發射設備。基于RSSI定位模型如圖4所示,廣泛應用于室內定位、無線傳感器網絡和移動通信。基于接收信號強度的無源定位技術主要有2種模型:①基于路徑損耗模型的RSSI無源定位;②基于指紋法的RSSI無源定位。
2.1.1基于路徑損耗模型的RSSI定位
基于路徑損耗模型的RSSI定位會受到發射功率PT路徑衰減PLoss、接收增益P和系統增益P四個因素的影響。
RSSI定位技術主要有三邊定位算法、加權三邊定位方法等。文獻使用基于路徑損耗模型的三邊無線定位技術,結果顯示BLE比WiFi、無源RFID、Zigbee和遠程廣域網(Long Range-Wide AreaNetwork,LoRa-WAN)定位精度要高,但是RSSI定位也存在一些局限性:①室內定位中信號的傳播易受到環境的影響,例如墻壁、障礙物和干擾源等都會造成多徑干擾,影響信號的傳播和接收;②信號強度的測量也受到設備本身特性、信號衰減和噪聲等影響,即RSSI路徑損耗模型及其參數的不確定性導致距離計算存在誤差。
為了減小RSSI定位誤差,學者們提出許多解決辦法,如文獻將鏈接質量指標(Link Quality In-dicators,LQI)引入到測距中,由于LQI動態范圍比RSSI大,分辨率更高,進而選擇波動相對較小的方式,然而該算法需要提前預測估計的距離。還有學者通過高斯濾波算法對RSSI值進行處理,降低小概率干擾事件的影響。但該算法并不能較好地處理陰影效應或墻體反射等長期干擾問題。文獻提出卡爾曼濾波算法,在一定程度上可以削弱噪聲疊加引起的RSSI測量值偏移。最近,文獻對RSSI的第一種測距誤差進行了全面分析,在權衡了幾種減小誤差的方法后,對RSSI的測量值進行了混合濾波處理。在計算坐標位置時,提出了加權三邊定位方法,提高了傳統三邊定位的精度。文獻提出了一種具有重疊多狀態路徑損耗模型來考慮包括視距(Line of Sight,LoS)和NLoS狀態在內的多種路徑損耗模型的定位方法,該算法對路徑損耗模型組的多個候選位置的組合估計位置,采用遺傳算法針對節點數量增多帶來的復雜度進行降低,并且所提方法在實際室內環境下的平均定位誤差達到1.92m。
2.1.2基于指紋的RSSI定位
利用RSSI進行定位還有基于指紋法的定位技術。采用指紋定位技術可以在盡量避免第二種誤差的同時提高定位精度。指紋法定位是通過測量定位區域內多個位置的RSSI,建立位置與RSSI之間的離線數據庫;通過比較實際測量的信號強度值與數據庫記錄得到該位置的對應值。這種方法需要事先進行大量的測量,并且一旦環境發生變化,數據庫信息不能及時更新。因此,基于RSSI的指紋定位技術運算量較大、離線階段耗時而且價格比較昂貴,但是指紋法的定位精度較高。
在基于RSSI指紋室內定位方法中,還有其他一些定位方案可供選擇,包括基于概率方案、確定性方案和支持向量機。基于概率性方法使用貝葉斯準則進行統計推斷,以確定目標信號測量值與存儲指紋之間的關系;確定性方法則使用相似性度量來區分數據集中的測量信號和指紋數據,以定位用戶的位置;支持向量機則通過非線性回歸提供從移動設備上收集的RSSI到估計位置的直接映射。盡管這些方法的復雜度較低,但由于室內RSSI的大幅波動,它們的精度并不穩定,誤差較大,與上述指紋定位技術不同,文獻提出神經網絡用于室內定位。
近年來,隨著機器學習的發展和6G超材料RIS的應用,使得RSSI定位精度有了進一步提升。文獻是一種合適且可靠的基于RSSI的室內定位解決方案,該方案采用遞歸神經網絡(RecurrentNeural Network,RNN)模型,RNN具有逼近高維、高度非線性模型的能力。區別于一次定位移動用戶位置,該方案針對軌跡定位,考慮軌跡中RSSI測量值之間的相關性,同時為了提高RSSI時間波動之間的準確性,對輸入RSSI數據和順序輸出位置都提出了加權平均濾波器,具有較好的定位效果。文獻引入RIS來解決RIS在錨節點(Anchor Node,AN)和未知節點(Unknown Node,UN)之間構建虛擬視距(Virtual LoS,VLoS)路徑的LoS缺失問題,并基于最大化UN的RSSI提出RIS相位調整方案。克服了由于LoS路徑缺失導致的算法性能顯著衰減的不足,且UN定位和RIS參數優化問題只需進行一次方向搜索即可求解,有效降低了搜索的維度。
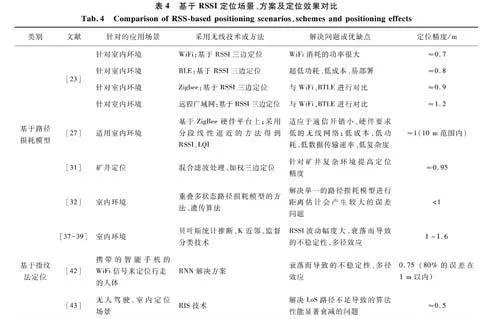
研究主要基于RSSI定位技術的精度可接受、可靠性好、靈活性高、成本低等優點。基于路徑損耗模型定位技術不如基于指紋定位精度高,基于指紋的定位技術又存在環境限制、計算量大等缺陷。無論哪種定位技術都有其優缺點,重點在于根據定位場景、成本等因素選擇合適的定位方案。同時,基于RSSI的定位技術主要應用于小區域定位,如礦井、室內等,除此之外,隨著計算機網絡算力的增加而選擇基于神經網絡的指紋法定位是大趨勢,且6G新技術為基于RSSI的室內定位提供了新思路。表4總結了各文獻基于RSSI定位分析。
2.2基于DOA的無源定位
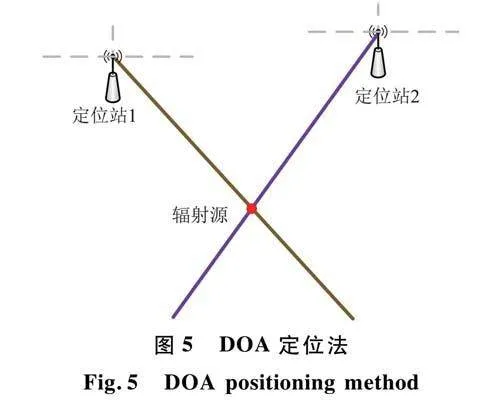
DOA定位技術主要是利用陣列天線接收目標輻射源入射信號估計來波角度進行定位。如果目標靜止,則可以通過增加定位站數量估計輻射源到多個定位站的角度,利用DOA方位線相交確定目標位置,如圖5所示。一般情況下方位角的估計誤差常常導致多條方位線不能相交于一點,造成目標定位集中于一個三角區域,通常計算三角質心作為最終的位置估計,所以DOA定位技術又稱三邊定位法,與RSSI定位類似。如果目標處于緩慢運動狀態,同時信號處理速度大于目標運動速度時,此方法仍有一定的適用性,但不適合運動較快的目標定位,否則定位誤差往往很大;除此之外,DOA定位技術只適用于信號LoS傳播。RIS的出現為其提供了新的技術支撐,解決了NLoS下已知RIS位置信號經過反射后方位角估計來定位的問題;DOA定位原理簡單,但僅僅通過定位站獲取輻射源方位角進行定位,定位站相對獲取輻射源參數信息較少。
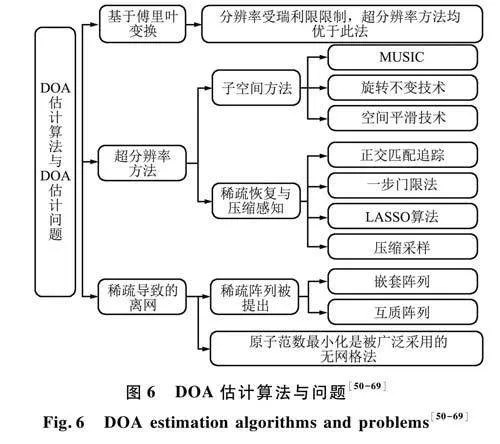
DOA估計算法研究了幾十年,具有針對多種問題的具體估計方法和算法,DOA估計算法是信號處理研究內容,由于本文主要對無源定位技術進行綜述,對信號處理的探討不在本文討論范圍內,故只對DOA估計所設計的算法進行簡要概述,如圖6所示。
現有的基于DOA定位技術主要有加權最小二乘(Weighted Least Square,WLS)和極大似然估計(Maxi-mum Likelihood Estimation.MLE)。如文獻采用MLE器的純角度定位。文獻提出了一種加權方法,該方法通過使用與DOA估計精度相關的相應因子對每個估計的DOA進行加權來減少定位誤差。文獻通過使用最小二乘法(Least Square,LS)來減少定位誤差。文獻考慮多徑、密集散射體存在的全球定位系統(Global Positioning System,GPS)失效的室內環境,在大規模多輸入多輸出(MultipleInput Multiple Output,MIMO)系統中利用單個基站處信道的稀疏特性,通過數據融合中心合成接收信號的協方差矩陣進行二維空間信息測量融合,生成信息豐富的空間譜,并進行網格細化處理,將定位誤差降低到分米級;在二維DOA估計的基礎上,提出了一種基于均勻圓陣(Uniform Circular Array,UCA)結構的空間譜融合估計與定位(Spatial Spectrum Fu-sion Estimation and Localization,SSFEAL)算法,利用分布式大規模MIMO基站接收到的每個頻點上非相干窄帶上行導頻信號的空間頻譜進行頻譜融合。
在車聯網領域,基于DOA參數定位也有很大的應用價值。文獻提出了一種基于大規模MIMO的超分辨DOA估計算法,大規模MIMO采用共形陣列,同時將基于共形陣列的自主車輛DOA估計定位問題建模為一個新穎的塊稀疏恢復問題。構建基于大規模MIMO的無人駕駛車輛定位系統架構,該系統可以實現自動駕駛車輛的超分辨DOA估計。文獻提出了一種基于DOA估計的輔助車輛定位方法,輔助車輛定位系統由3個配備MIMO陣列的基站組成,如果已知3個基站的位置以及基站估計的車輛的DOA,就可以估計出車輛的位置。
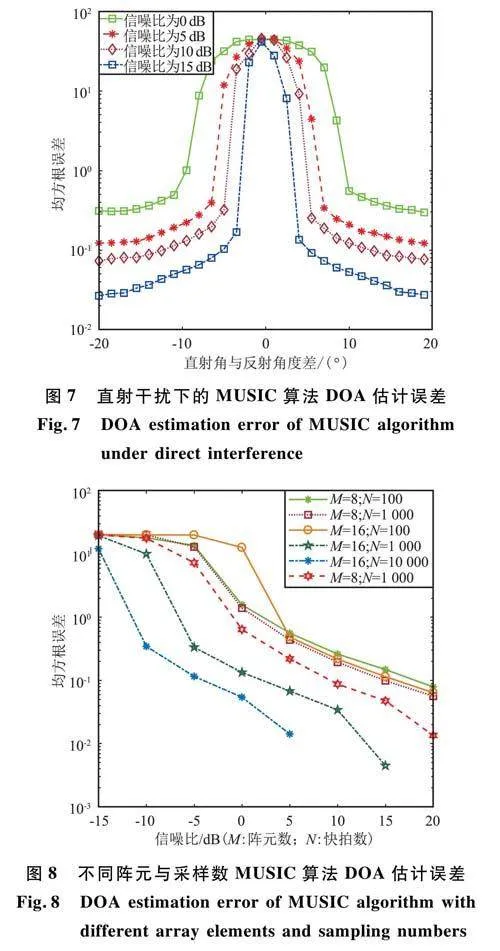
同時,AmBC也可以通過估計標簽角度信息進行定位。通過利用環境中信號和部署的散射設備解決NLoS問題,增強信號的接收功率,且由于利用環境信號而具有綠色無源的效果,如文獻采用DOA信息對標簽進行定位。模擬多徑環境下的正交頻分復用(Orthogonal Frequency Division Multi-plexing,OFDM)信號經過反射設備(Backscatter De-vlce,BD)后采樣,采用2臺陣列接收機進行DOA估計,根據基站與接收機幾何關系得到定位結果,多重信號分類(Multiple Signal Classification,MUSIC)算法DOA估計仿真如圖7和圖8所示。可以看到DOA估計在高信噪比精度更高,定位誤差也更小。雖然此種定位技術的精度有待提高,如面臨直射干擾問題如何消除問題,但是使用BD技術可以解決NLoS定位問題。
2.3其他參數的無源定位
2.3.1基于TOA定位
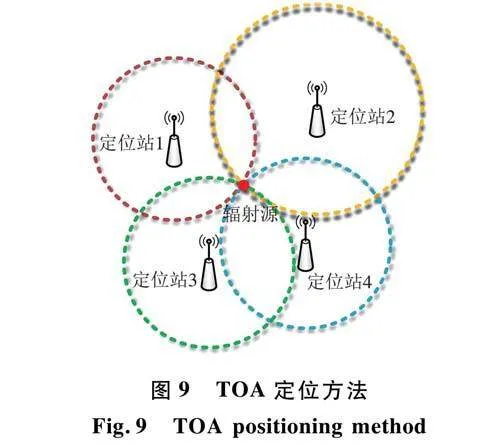
根據輻射源傳播時間計算輻射源到定位站的距離信息。以定位站為圓心,測量到輻射源距離為半徑畫圓,多個定位站會有多個圓相交,交點即為輻射源位置,如圖9所示,定位方法與DOA、RSSI定位類似。大多數情況下,TOA定位法需要3個及以上的定位站才能確定輻射源位置,否則出現偽解。
以TOA測距為準則的定位法需要收發雙方嚴格時鐘同步,這一要求在電子對抗中很難實現,即使在智慧城市或車聯網領域也很難滿足高精度定位需求,因此多用在室內定位場景。大多數基于TOA的定位技術主要圍繞噪聲背景下解決信道狀態不佳的同步技術和多徑問題展開,此外,由于信號傳輸速度快,較小的時間誤差引起較大的距離誤差,以及要求接收機具有較強的計算能力,因此眾多缺陷交織限制了此類定位技術的發展。但仍有學者對TOA定位進行研究。
文獻提出了一種卡爾曼濾波和線性化相結合的UWB室內定位方法,以減小多徑效應或NLoS的影響,提高定位精度。文獻考慮節點間的拓撲關系,提出了一種基于拓撲單元的TOA協同定位算法,以提高NLoS復雜環境下的定位性能。文獻通過識別NLoS,然后剔除NLoS損傷測量值的方法處理NLoS傳播。文獻利用約束優化技術消除了NLoS誤差。文獻利用TOA測量值估計具有傳感器位置不確定性的靜止輻射源的位置,定位結果表明,優于兩步WLS和忽略傳感器位置不確定性的傳統多維尺度估計器。文獻提出了一種新穎的兩步期望最大化(Two-Step Expecta-tion Maximization,TSEM)方法用于無源目標位置估計,實現了無源TOA定位算法的克拉美勞界(Cramer-Rao Lower Bounds,CRLB),結合了期望最大化技術和文獻中估計TDOA算法的思想,證明了TOA的CRLB遠低于TDOA。
2.3.2基于FDOA定位
基于FDOA定位技術多用在目標與觀測站存在相互運動的情況,然后根據多普勒效應,基站與基站間接收到的電磁波信號頻率將不同于目標信號原發射頻率。基于FDOA的定位方法正是根據不同基站間的多普勒頻差完成定位任務。目前基于FDOA的單參數定位方法很少單獨使用,多與TDOA無源定位方法聯合使用,主要是由于利用FDOA解算位置方程的非線性強,方法復雜。
2.3.3基于TDOA定位
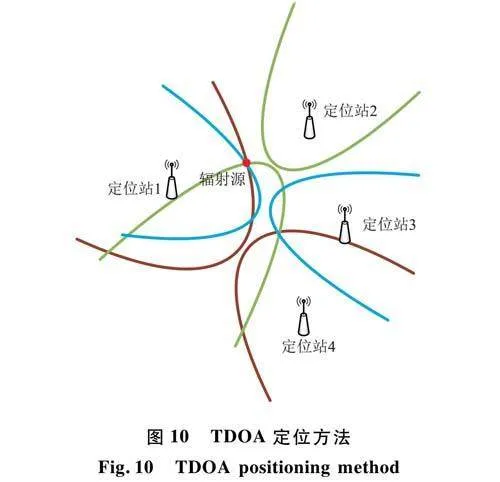
基于TDOA定位方法主要有2種:一種是估計信號電磁波單程傳播時間,TOA測量值直接兩兩相減即可得到TDOA,由于此種方法是測量發送和到達接收方的絕對時間差,所以仍需要收發雙方精準的時間同步;另一種是測量信號往返時間差,發射節點同時發射2種不同速度的信號,接收站根據2種信號達到的時間差,利用2種信號傳播速度,計算收發兩點之間的距離信息。此種定位技術僅需要輻射源時鐘,不要求基站與輻射源保持嚴格時間同步,對無線傳感器網絡時間同步的要求大大降低。同時,TDOA定位也不需要利用信號達到的絕對時間差來確定目標位置,裝置簡單且定位精度高。此種定位技術得到了眾多學者研究,發展較為成熟,TDOA位置解算方程一般是二次非線性,因此TDOA定位方法如圖10所示。第二種定位方法中大部分時差定位技術主要根據廣義互相關法進行定位。廣義互相關法是對2路傳播信號進行互相關運算,以濾波后的互相關峰值去逼近真實的時延。
關于TDOA定位具體方法是假設二維平面上共M個基站參與對目標的定位,且各個基站的位置坐標分別為:
這解釋了為什么關于TDOA定位方程為雙曲線模型。下面針對TDOA存在的問題分4種情況進行討論:
①NLoS影響。進行TDOA參數定位時,根據互相關法可以求得時延差進行位置解算,但由于地理環境因素,電磁波在NLoS路徑產生反射、折射和衍射,同時各種干擾和噪聲的存在也使得定位精度大打折扣,為了提高定位精度,眾多學者研究如何區分LoS和NLoS路徑或削弱NLoS路徑的影響。有學者提出直接將測量得到的TDOA值進行NLoS識別丟棄,但同時也會丟棄有用信息。文獻并沒有采用此方法,而是通過改變TDOA測量值中的LoS與NLoS的比重減少NLoS影響,或將NLoS作為先驗知識減少NLoS誤差影響,提高定位精度。文獻并沒有統計NLoS信息,而是直接轉化成具有約束條件下的LS和半正定規劃的凸優化問題。
②非高斯噪聲影響。關于噪聲對定位精度的影響,眾多文獻在位置解算推導過程中均采用服從高斯分布且相互獨立的噪聲,然而實際環境并非如此理想。基于非高斯噪聲的推導具有一定的復雜度,且仿真模擬難以實現真正環境中的具體場景,也是TDOA定位的一種理論定位缺陷。
③從算法層面考慮。為了提高定位精度,解決和優化TDOA無源定位方程中的非線性可提高定位精度,各種位置解算算法應運而生。主要包括LS、泰勒級數法、牛頓法、凸優化中的半正定規劃以及為了解決非凸問題的凸松弛法。近年來遺傳算法、粒子群算法也被學者加以利用,眾多文獻均表明在一定的假設條件下可以減少定位誤差。
④考慮基站調度。基站的調度也是影響TDOA定位精度的重要因素。由于不可能把所有基站作為參考基站獲取TDOA參數,因此,選擇合適的基站數與位置使得定位精度最高的一個為最佳分布成為新的研究方向,有關學者關于此類問題基本上均采用規劃方法解決基站的選擇與布局。
近年來關于上述TDOA定位遇到的無論是NLoS影響、噪聲建模難以貼合實際環境,還是位置解算算法非線性高的問題都隨著機器學習、神經網絡等技術的發展得到進一步解決,機器學習強大的建模能力為克服上述難點提供了新的生機與活力。如對于NLoS識別問題,文獻分別采用集成學習中自適應增強(Adaptive Boosting,AdaBoost)算法、卷積神經網絡(Convolutional Neural Network,CNN)、長短時記憶遞歸神經網絡(Long Short TermMemory Recurrent Neural Network, LSTM RNN)和支持向量機(Support Vector Machine,SVM)得到了很好的識別效果,定位精度也大大提升;針對城市電磁環境復雜噪聲的情況,采用深度學習進行深入挖掘和學習復雜噪聲特征,進而模擬貼合實際環境定位場景;關于位置解算算法采用機器學習方法,定位精度也得到很好的改善,在文獻中,相比于采用傳統TDOA解算算法,機器學習定位性能提升50%左右。因此,機器學習方法在TDOA定位中發揮了極大作用,具有廣闊的發展前景,同時也指明了未來研究的主要方向。
3多參數融合定位技術
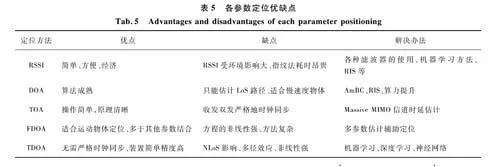
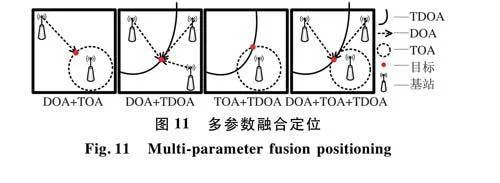
隨著電磁環境的日益復雜,大規模復雜多樣化接入設備日益增加,以及局部定位系統(Local Posi-tioning System,LPS)特別是在封閉空間(如醫院、倉庫、生產車間和地下室等)中的超可靠、低時延及超高密度連接的感知需求成為未來無源定位發展亟需解決的重要難題。大多數文獻采用單一參數進行定位,通過對比表5所示各個參數定位優缺點可以發現,DOA參數只能獲取輻射源的方向參數,而無法測量距離信息,且DOA因室內的鏡面反射、物體移動而導致LoS條件不足和信號衰減嚴重,最終導致參數估計精度降低而無法使用。因此,DOA參數多與其他參數結合定位,如文獻考慮基于TDOA與DOA參數信息定位,采用多動態無人機對靜止目標定位,根據TDOA定位原理,在三維空間里至少需要4架無人機的TDOA信息才能完成目標定位,所以在降低成本的同時,結合DOA參數以便為精確定位提供額外的參數信息支持。文獻所考慮的模型則相反,在同樣考慮使用TDOA與DOA參數信息時聯合多站對無人機進行定位,將NLoS鏈路分解為2條LoS路徑,分別采用基于LoS的DOA和基于TDOA的技術進行建模,所提算法降低了接收機數量和先驗NLoS信息需求。
面對復雜的電磁環境和各種不同的應用場景,諸多學者對多參數定位進行了研究,多參數融合定位如圖11所示。大量文獻表明,多參數融合定位多用在輻射源與接收站存在相對運動關系中,且多采用FDOA、TDOA、TOA、DOA參數進行定位。在多目標動態場景中的多參數融合定位遇到的問題與單參數定位遇到的問題都極為相似,如NLoS影響、多徑效應、非線性處理方法及平臺幾何關系影響等。
4新場景與新興定位技術
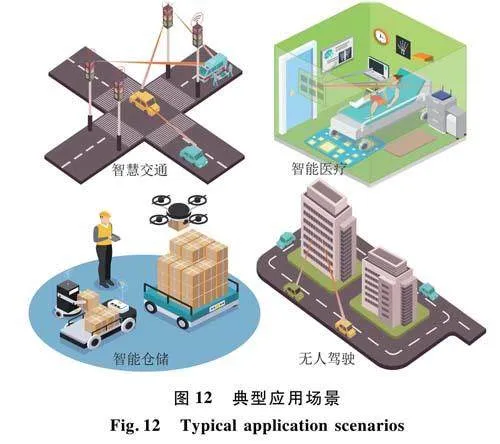
隨著智慧城市的迅速發展,人們對于位置感知信息的需求越來越強烈,有關定位技術的研究也正在迅速推進,從導航系統到物流管理,從智能手機到無人駕駛,定位技術已經成為現代社會生活不可或缺的一部分,面對IoT無線設備爆炸式增長,智慧城市中未來幾種新興應用場景如圖12所示。
本節主要介紹無源定位在當前智慧城市中幾種新興應用場景與定位技術。為解決復雜多樣化的感知服務需求注入新的活力。
4.1新興應用場景
4.1.1智能交通
高精度、穩定性的車聯網定位是自動駕駛中不可或缺的一環,同樣是建設智慧城市的重要組成部分。車聯網中的定位是指通過各種技術手段,準確地獲取車輛的位置信息并傳輸到系統中,具有相當的實時性。車聯網中的定位技術應用十分廣泛,比如,定位可以提高車輛的安全性和防盜能力;可用于車輛的導航和路徑規劃來選擇最佳的行駛路線,節省時間和燃料消耗,減少交通堵塞,降低生命風險等。
車輛定位技術是諸多學者研究的熱點,同樣也是一大難點。因輻射源采用無線蜂窩網定位技術以及GPS適用于無遮擋室外定位,在高密度城市、隧道中的定位效果極差甚至無法進行定位。針對GPS定位精度不高的問題,利用深度神經網絡算法對車輛位置進行修正,通過智能車輛定位誤差共享模型減小GPS定位誤差。
另有學者研究基于傳感器的定位技術,例如利用無線射頻標簽定位解決在封閉區域內的定位問題,但其穩定性和精度并不理想。車輛行駛速度將成為制約因素之一,如高速移動狀態下的車輛很難識別到BD或部署在道路旁、路燈上的BD極易被損毀等因素影響,難以滿足自動駕駛、車聯網定位的50cm精度需求。因此如何在高樓大廈、車輛密集、地下車庫和隧道等無法獲取基站信號或信號遭受遮擋和干擾的封閉區域實現高精度定位,亟需設計一種低成本、低功耗、高精度、高可靠、簡單易行的車輛定位技術。文獻提出了一種AmBC的車輛精準定位技術,通過設計聯合調相調頻(Joint Phase-and-Frequency Modulation, JPFM)波形信號,其僅需在車輛頂端安裝一個包含2根天線的定位閱讀器以及在道路邊部署至少一個定位標簽,便可實現高精度車輛定位,定位精度可以達到厘米級,且為了提高定位精度在閱讀器端部署多天線,多天線MIMO系統將帶來更多的信道增益,定位誤差也將大大降低。
4.1.2智能倉儲
智慧城市中少不了智能倉儲系統。智能倉儲是一種運用先進的技術手段和信息系統來提高倉儲效率和管理水平的倉儲方式。環境反向散射無源定位技術可以用于智能倉儲系統中物品的定位和追蹤,還可以通過對物品的位置和狀態進行分析,提供智能化的倉儲管理決策。例如,優化貨物存放位置和路徑規劃,進一步提高倉儲系統的效率和靈活性。通過在倉儲環境中部署無源信號源,例如WiFi、路由器等,系統可以利用環境中的反射或散射信號來確定物品的位置。這種定位方式不需要物品上攜帶任何定位設備,可以大大降低成本,提高倉儲系統的可擴展性。
4.1.3智能醫療
智能醫療系統與倉儲類似,智能醫療是利用先進的技術手段來提高醫療效率和質量的一種新型醫療模式。在智能醫療中,環境反向散射與RIS無源定位技術可以用于實時監測和定位患者的位置,從而提供更精準的醫療服務。例如,醫護人員可以通過無線電信號定位系統迅速找到需要急救的患者,提高救治效率。此外,該技術還可以用于追蹤病人在醫院內的活動,為病房管理和病人安全提供保障。在智能健康監測中,通過在家庭環境中布置無線電信號定位系統,可以實時監測老年人或患有慢性疾病的患者的位置和活動。當發生緊急情況時,系統可以自動觸發警報,以便及時采取相應的救助措施。這種技術的應用可以提高老年人和慢性病患者的生活質量,并減輕家庭和醫療機構的負擔。
4.2新興定位技術
通信技術的進步意味著電磁環境的變化,面對復雜多變的電磁環境和新興應用場景,需要新的技術提高定位精度,同時借鑒前述參數化定位方案,提出更加貼合實際電磁環境的定位技術尤為重要。本節主要圍繞AmBC、RIS與太赫茲通信等新興技術或材料為無源定位帶來的新的契機進行討論,同時創新性地提出基于AmBC多標簽室內定位場景作為實例進行仿真驗證。
4.2.1環境反向散射
IoT設備定位是一個具有重要現實意義的研究領域。AmBC與IoT緊密相連,具有低功耗、低成本、易部署等眾多優點,自2013年提出以來得到了廣泛的應用。AmBC與傳統的反向散射不同,環境反向散射是利用環境中的電磁波信號,例如電視發射塔、蜂窩基站和WiFi接入點等作為環境射頻載波實現信息傳輸,而不需要特定的射頻源,減少了部署專用射頻源的成本,AmBC也被稱為“空中調制”技術;而傳統的反向散射通信,如RFID,則是利用專用的射頻信號照亮無源標簽并攜帶標簽信息。
在當前的5G時代至6G的新愿景下,IoT將面臨海量連接數和頻譜資源短缺問題。同時,環境反向散射技術非常適合與各種參數相結合實現無源定位。這種技術能夠有效避免NLoS信號傳播的影響,并且能夠穩定提升定位精度。環境反向散射定位技術在現實中有著很大的需求,如智能家居中的IoT尋物、車聯網定位、智能醫療及智能倉儲的物流管理等新型場景,AmBC是將來實現無源定位低成本和綠色通信的有前途的解決方案,是未來無線網絡定位的重要研究內容。如屬于外輻射信號無源定位系統的IoT AmBC定位技術可通過增加BD數量構建MIMO系統,應用于GPS、北斗衛星定位系統因室內復雜的電磁環境、多徑效應、NLoS和時鐘同步等因素引起定位精度低下的車聯網定位、室內定位和礦井定位,使得定位精度進一步提升。
文獻提出了一種基于DOA慣性測量單元同時定位與地圖構建框架的反向散射定位系統,融合來自反向散射WiFi信號和慣性傳感器的測量值,同時估計機器人和標簽的位置。文獻利用后向散射通信來定位飛機上的安全背心,并通過在標簽詢問過程中觀察到的模式來限制標簽的搜索空間以提高定位精度。文獻提出了一種具有厘米級精度的室內定位系統,并設計了LoRa后向散射設備,通過比較接收信號強度來確定設備位置。
將反向散射定位技術應用于IoT是促進定位相關研究的一大推動力,將智能機器人與定位技術相結合可以提升物流管理的效率。如2019年,麻省理工學院實驗室提出了可應用于智能機器人的Turbo-track定位系統,不僅實現了三維環境下對RFID標簽細粒度的定位,而且可以追蹤待定位標簽軌跡。除此之外,本節提出基于AmBC多BD定位實例,場景如圖13所示。
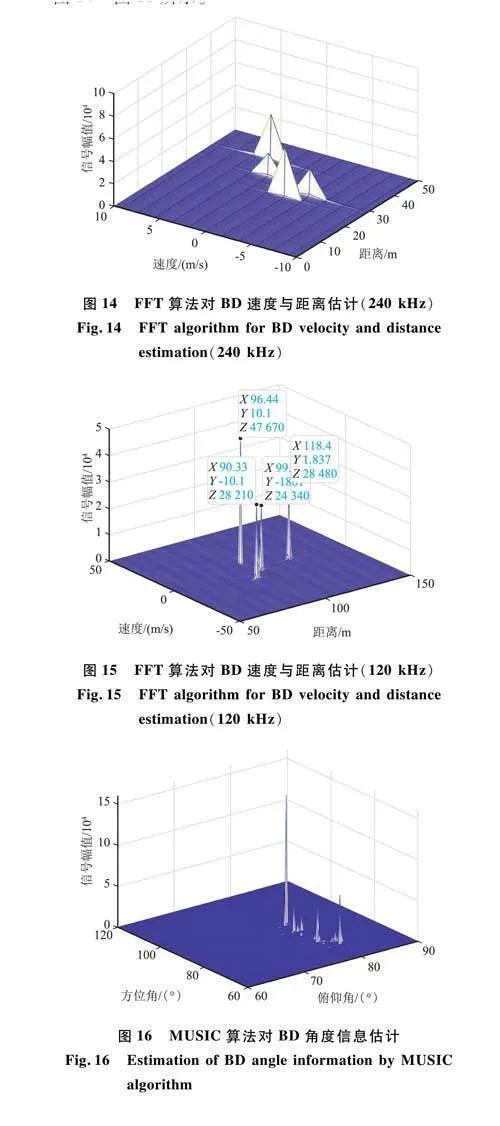
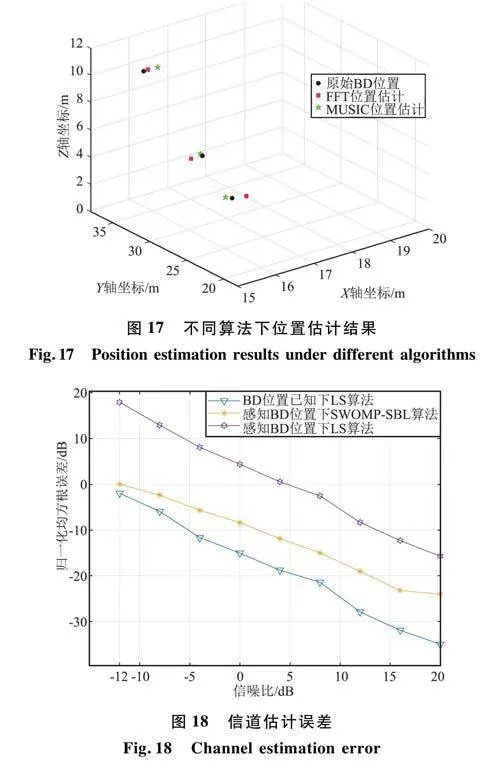
圖13中考慮環境單天線射頻源(例如WiFi),環境中存在緩慢移動的4個BD,BD通過調制來自射頻源的環境OFDM信號向接收機傳輸信息,接收機聯合估計BD位置與級聯信道估計,且射頻源與接收機共享導頻信息,模型假設接收機仍可以接收除BD以外的其他反射信號,而非BD的信號可以通過當BD處于接收信號時進行環境信道估計,在BD處于反射狀態時對環境鏈信道進行消除,之后進行有關BD位置估計與信道估計。有關集成感知與通信AmBC的相關研究,可參考文獻[138]中的詳細討論。與文獻不同的是該場景BD定位采用快速傅里葉變換(Fast Fourier Transform,FFT)與MUSIC算法,在信道估計階段采用基于位置輔助的加權正交匹配追蹤一稀疏貝葉斯學習(SimultaneousWeighting Orthogonal Matching Pursuit-Sparse BayesianLearning,SWOMP-SBL)算法。相關的仿真結果如圖14~圖18所示。
從圖14和圖15可以看出,不同的OFDM子載波帶寬下FFT算法具有不同的分辨率;此外,使用MUSIC高分辨率算法估計BD角度信息時相比使用FFT算法估計距離信息擁有更好的分辨率,因此在圖17的位置估計結果中可以看出,使用MUSIC算法位置估計更加準確。在估計出BD位置后,根據BD位置信息可以輔助級聯信道估計,圖18為采用LS與SWOMP-SBL兩種算法下的信道估計結果,通常情況下把準確位置信息下的信道估計作為估計下界。
4.2.2RIS輔助定位
RIS作為6G的主要研究內容之一,能夠為IoT系統提供大連接、低時延、高可靠、寬覆蓋和高精度的無源位置服務,隨著通信技術的進步,RIS在定位方面的作用更為重要。諸多研究表明,RIS與SG通信系統中大規模MIMO相似,可以提高通信速率,形成高增益窄波束提高通信信噪比,幫助MIMO進入2.0時代。
RIS由大量的被動元件組成,如天線、可變反射器等,可以通過調整反射信號的相位和幅度來改變信號的傳輸特性,實現對信號的定向傳輸,從而實現高精度的定位。這對于無人駕駛、智能物流等應用來說非常重要,可以提高系統的定位精度和可靠性。RIS作為一個被動的、可定制的、低能耗的BD,提供額外的位置參考和可分辨的多徑測量,可以實現或增強定位。此外,RIS之間不需要精細的同步,簡化了在環境中的部署,因此可以創建近場場景,尤其為室內環境中的定位問題提供了良好的解決方案。
RIS在實現或增強定位的作用主要體現在兩方面:一方面在多個基站情況下,RIS可以作為被動錨點提供幾何多樣性,提供近場場景利用到達曲率(Curvature of Arrival,COA)信息以獲得滿意的估計性能,并且可以解決信號傳輸的NLoS問題。另一方面,考慮到因環境因素而導致的多徑效應的不可控性和多基站部署的挑戰性,例如高硬件成本、同步和校準誤差等,RIS可能是一種潛在的解決方案。最近關于RIS定位技術還可以利用多徑分量進行寬帶高頻信號定位,通常被認為是破壞性信號的多路徑分量可以在5G、6G系統中得以解決,從而實現定位,即使是單個基站也可以進行地圖構建。
4.2.3太赫茲無線通信系統
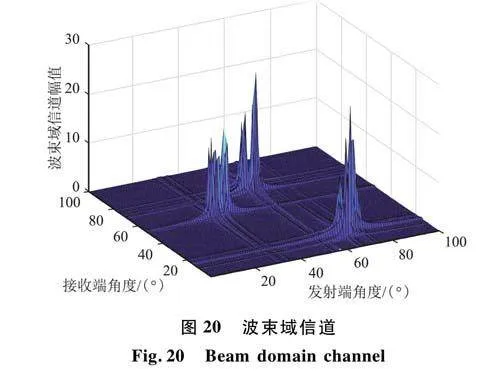
5G以毫米波為代表的典型定位系統中,定位正在從基于位置服務到基于位置感知通信轉變,在這種服務模式下,用戶的位置信息可以被用來優化通信網絡資源分配,提高通信質量和效率,此種發展趨勢一直持續到6G無線通信系統。在未來的6G通信系統,太赫茲通信被認為為融合定位、感知和通信的關鍵使能技術。定位和通信集成并相輔相成以實現3D網絡覆蓋下的無處不在的聯通性以及低時延高速率的數據傳輸。
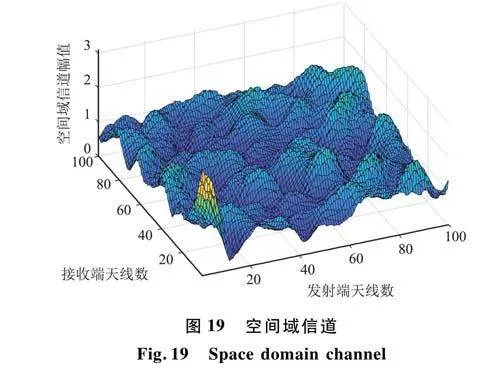
在6G新愿景下,太赫茲頻段作為高數據傳輸被人們廣泛關注。然而一切新技術的開發應用并不是一蹴而就,太赫茲頻段雖能夠帶來比5G更高速率,但同時由于載頻逐步提高而帶來的信號傳輸損耗更為嚴重,即使是空氣中的水蒸氣也會嚴重影響信號傳播。解決這些損耗的潛在方案是利用超大規模MIMO和可重構RIS,通過波束賦形的窄波束提高鏈路信噪比,無源RIS通過調控入射信號的幅度與相位以低復雜度、高增益重塑信道。從定位層面更為具體地講,用戶可以向基站發送上行導頻或用戶接收基站向下發送的導頻,由于信號衰減嚴重,但信道在波束域呈現稀疏狀態,根據已知接收導頻信息可以估計信道狀態信息并提取每條路徑的信道參數,主要包括時延和角度信息,即使信道的波束域是簇稀疏狀態,由于窄的波束寬度提供高的角度分辨率,而寬的帶寬提供精確的時延估計,因此對信道估計并設計相應算法可以準確估計信號傳播方向與時延,有助于大幅度提高定位性能,因此太赫茲在定位方面有廣泛的應用前景。下文從仿真層面驗證毫米波或太赫茲信道的稀疏特性。
從毫米波到太赫茲,即是需求也是發展的必然。人們追求更高的頻率和更大的帶寬帶來的高速數據傳輸。高頻增加了路徑損耗,同時也提升了角度分辨率,減少了多徑分量,大帶寬提供了高的時延估計分辨率。使用更小波長的小型化多天線的天線陣列尺寸成為可能。
5挑戰與未來研究方向
5.1面臨的挑戰
隨著位置信息在眾多場景中的需求增加,以及根據以上幾種參數化定位技術的討論和目前諸多學者的研究內容可以看出,無源定位技術仍面臨著眾多挑戰與難點,主要可以分為以下幾類問題:定位精度問題、系統模型環境適應性差、硬件成本與算法復雜度問題、多目標實時定位問題、信號覆蓋范圍問題以及多模態融合等。隨著信息處理技術的發展、硬件水平的提高、通信技術的進步,為無源定位提供了新的解決辦法。本節主要圍繞AmBC、RIS與太赫茲通信等新興技術為無源定位帶來的新的契機進行討論。
5.2未來研究方向
(1)毫米波、太赫茲通信帶動高精度定位
毫米波、太赫茲通信具有更高頻率,將帶來更短波長、多徑效應減弱、毫米波頻段信號衰減快,但也更易定位,高帶寬支持超短時延通信。TOA定位通過減小時延誤差可以提高精度,大規模天線集成技術實現高增益收發.信號質量和探測距離有利于提升定位性能。未來6G將為無源定位提供更好的通信基礎設施支持。
(2)傳統算法與新材料新技術融合相遇
傳統定位算法已經成熟,新興定位算法將在定位領域發揮重要作用。神經網絡定位方法具有抗干擾、適應性強、數據處理速度快、定位精度高等特點。該方法與傳統定位技術相融合,能夠有效解決多徑效應和噪聲對定位效果的影響。RIS與AmBC可以增強通信質量,增大定位覆蓋范圍,解決NLoS問題。邊緣計算和人工智能算法改進定位算法,例如利用深度學習減輕多徑影響,與其他定位技術融合,如視覺定位、慣性傳感等,實現多模態融合定位。
(3)大數據處理速度
隨著高集成電路發展,多核高處理器快速發展將帶來更快的處理速度,同時也意味著定位結果將更快速得出,為多目標、高時變移動物體實時定位及地圖構建提供了可能。參數估計時利用稀疏性進行求解的速度正在隨著硬件設施的進步和算力的提升而不斷增強。
(4)感知輔助定位
感知與定位融合是近一兩年新提出的一種輔助定位手段。文獻提出了毫米波MIMO輔助混合波束賦形(Hybrid Beamforming,HBF)架構的ISAC系統,將一種高能效的寬間隔陣列架構作為雷達接收機,以提高雷達感知的角度分辨率,同時為時變ISAC系統設計了一種ISAC幀結構,方便角度、時延和多普勒頻移的估計,設計了滿足HBF陣列硬件約束的導頻波形。此外,為了減少導頻開銷,將ISAC處理建模為具有專用字典的稀疏信號恢復問題,提出精化的正交匹配追蹤算法。基于此衍生出多種有關定位的研究方向,如關于CS方法的研究、雷達感知算法與信道估計(Channel Estimation,CE)算法的交互等。文獻同樣考慮毫米波MI-MO系統的上行信道估計問題。所提出的方法允許基站的信道估計由感知信息來輔助,感知信息包含了對環境中散射體位置的估計,并提出了一種SWOMP-SBL算法對散射體位置估計即可實現定位目標。
6結束語
本文主要根據參數化信息進行分類,分別闡述各個參數下的無源定位原理、方法,總結近年來的無源定位研究現狀和新型定位技術,以及無線通信技術為定位帶來的輔助作用。盡管無源定位近年來發展迅速,但仍有許多亟待解決的問題,比如實時跟蹤定位、參數估計、地圖構建、軌跡預測以及新型材料和新興技術與傳統定位算法融合相遇等問題;同時,無線通信領域的研究難點也影響著定位效果,如超大規模太赫茲定位帶來的近場效應與波束分裂問題。因此,形成穩定成熟的無源定位系統仍然還有很長的路要走,未來隨著人工智能與新一代通信組網的發展、6G中的RIS廣泛部署,必定推動無源定位精度進一步提升。
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49
