基于ARIMA-PSO-LSTM 的太陽能預測
2024-09-14 00:00:00沈露露黃晉浩花敏周雯
無線電通信技術
2024年4期

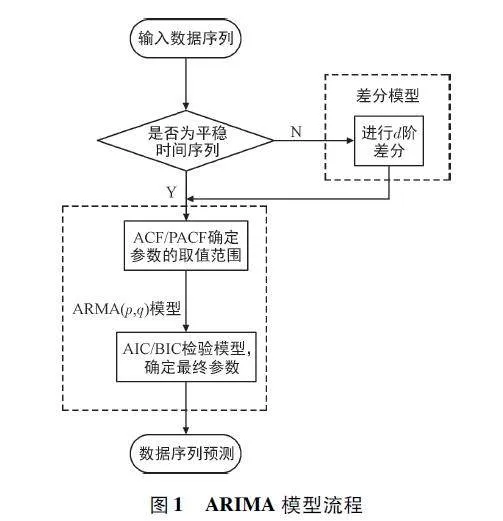
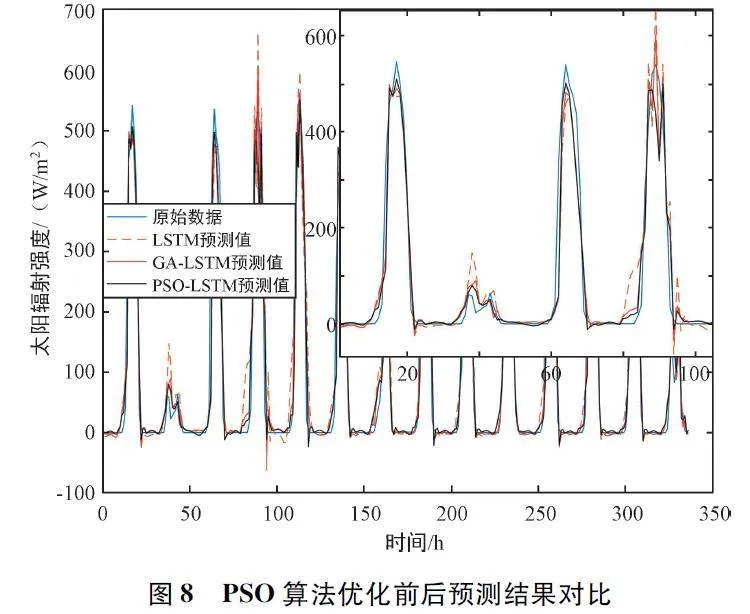
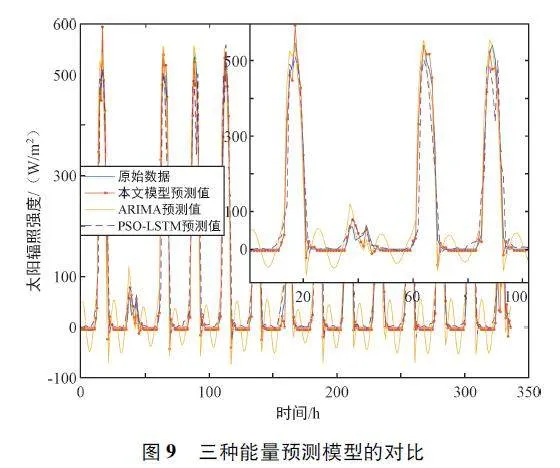

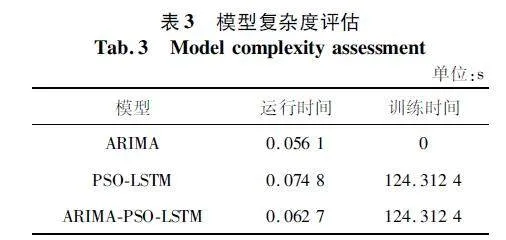
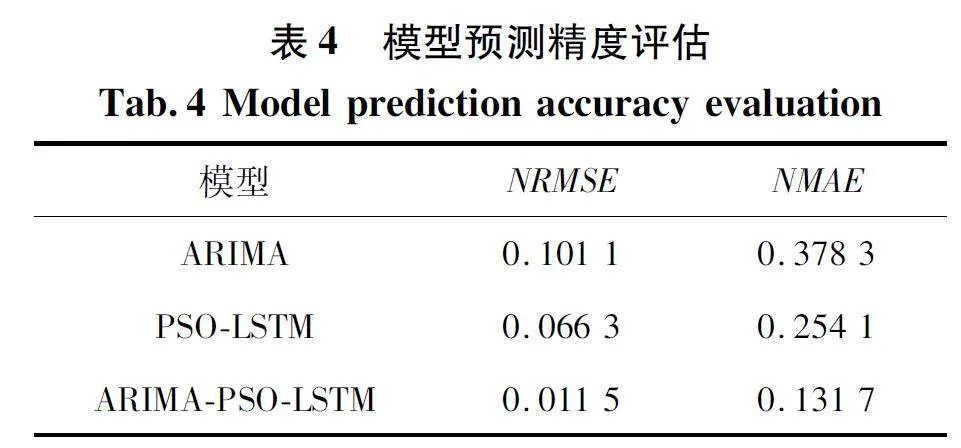
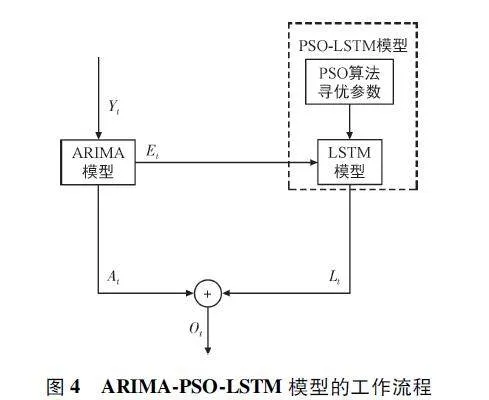
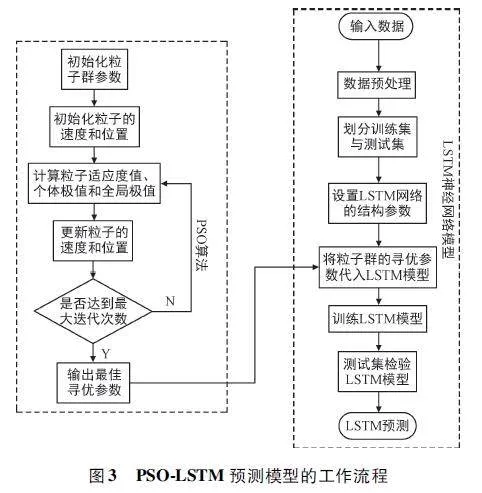



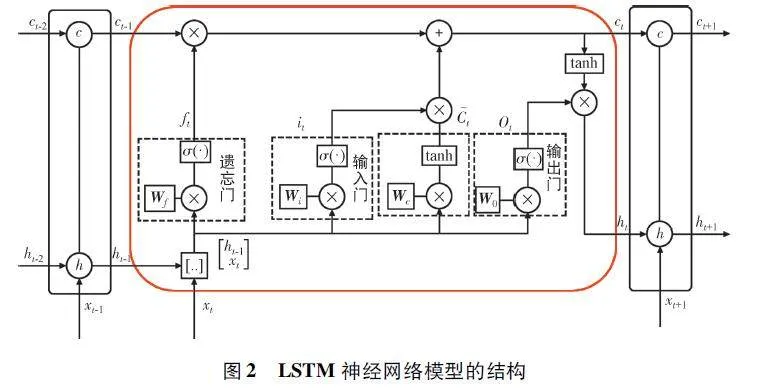
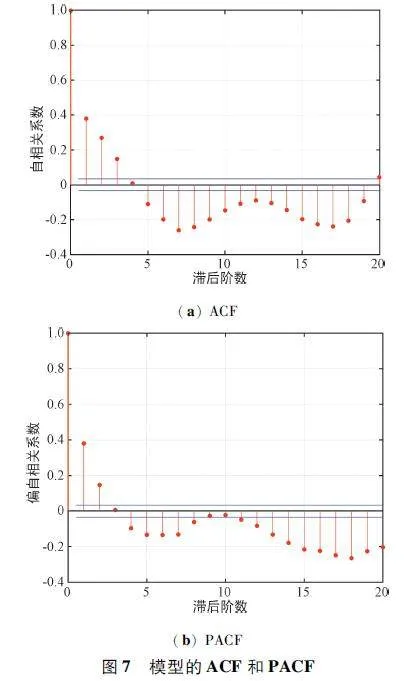
摘 要:太陽能是新興的可再生能源之一,可將其轉化為電能以供無線傳感器網絡(Wireless Sensor Networks,WSN)使用,對太陽能進行預測可以有效地利用能量,從而達到節省能源、維持網絡持續穩定運行的目的。提出了一種新的組合預測模型來預測太陽能輻照強度,其中改進的粒子群優化(Particle Swarm Optimization,PSO)算法被引入尋找長短期記憶(Long Short Term Memory,LSTM)神經網絡模型的最優參數。選取自回歸差分移動平均(Auto-Regressive In-tegrated Moving Average,ARIMA)模型來預測太陽輻照數據中的線性分量;采用PSO 算法來優化LSTM 神經網絡模型的超參數,有助于提高模型預測的精度和魯棒性;采用優化的LSTM 神經網絡模型來預測數據中的非線性分量;最后將兩個模型的預測結果進行疊加。實驗結果表明,新的組合模型比ARIMA、LSTM 等模型,具有更高的預測精度。
關鍵詞:自回歸差分移動平均模型;長短期記憶神經網絡模型;粒子群優化算法;能量預測算法
中圖分類號:TP929 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3114(2024)04-0771-08
0 引言
隨著無線傳感器網絡(Wireless SensorNetworks,WSN)的發展,各種各樣的相關應用接踵而至[1-2]。在WSN 中,環境能量是維持網絡運行的動力之一,采集的環境能量不穩定、不平衡,可能導致WSN 運行不穩定。為解決上述問題,對環境能量進行適當的預測具有至關重要的意義。能量預測方法可以準確預測出未來所需采集的能量大小,有助于網絡合理規劃能量分配,使WSN 節點能夠持續穩定運行,并且可以節省能源[3-7]。
為避免WSN 節點因為能量不足而導致運行停止,延長WSN 壽命,國內外學者對能量預測展開了一系列研究和探索[8-14]。……
登錄APP查看全文
