太陽同步軌道遙感衛星快速目標訪問計算方法
2024-09-14 00:00:00彭會湘劉剛陳金勇陳韜亦李爍
無線電通信技術 2024年4期






摘 要:目標訪問計算是指根據遙感衛星軌道和待觀測目標的位置,計算遙感衛星對目標觀測的時刻和姿態,是遙感衛星任務管控領域的重要基礎技術之一。高效的目標訪問計算方法可大幅提升衛星任務管控的時效性,對后續大規模遙感星座任務管控具有重要意義。利用太陽同步軌道衛星交點地方時不變的特點,快速估算出衛星經過目標的較短時間窗口,對時間窗口內的星歷進行逐點計算,獲取衛星對目標進行訪問的最佳時刻。試驗結果證明,該方法可大幅提升目標訪問時間的計算效率。
關鍵詞:遙感衛星;目標訪問;太陽同步軌道;地方時
中圖分類號:V412. 4+2 文獻標志碼:A 開放科學(資源服務)標識碼(OSID):
文章編號:1003-3114(2024)04-0730-09
0 引言
遙感衛星任務規劃主要分為3 個步驟:目標訪問計算、任務分解和任務規劃[1-2],其中訪問分析是任務分解和任務規劃的前提,主要是依據衛星運行軌跡和地面上各個目標位置,計算出衛星對所有目標的訪問時間窗口[3-5],針對每一個目標計算出衛星在各訪問時刻對該目標的觀測姿態角度信息[6]。根據衛星訪問目標的時間窗口對觀測任務進行分解,得到一系列觀測元任務[7-9],這些元任務都是由某顆衛星在指定時間以指定姿態角度一次性完成觀測成像,是不可分割的原子任務[10-13]。計算衛星對目標的最佳訪問時間是衛星任務規劃、指令編制等后續工作的基礎[14],其中最佳訪問時間通常是指衛星相對地面目標空間距離最近的時刻。
計算最佳訪問時間的常規方法是針對星歷文件,逐一計算星歷中衛星位置與目標的空間距離,找到最小空間距離對應的星歷記錄,該條記錄的時間即衛星對目標訪問的最佳時間。星歷文件由若干條記錄組成,記錄了衛星在每一時刻的實時位置。為保證計算精度,常采用1 s 間隔的星歷文件,1 d 的星歷文件包含86 400 條記錄。由于星歷數據量巨大,導致常規方法的計算量很大,計算效率低。
為了提高計算效率,通常采用多服務器或高性能GPU 服務器并行計算,并行計算雖然能夠大幅提升計算效率,但計算成本也大幅上升;同時,還需要針對并行計算硬件架構額外設計任務分配方法,算法設計難度較大。
本文針對在遙感衛星中占有很大比重的太陽同步軌道衛星的軌道特點,提出了一種衛星對目標訪問時間的快速計算方法,基于常規的硬件條件,可將計算量降低至常規算法的1 /4 以下,大幅提高計算效率,對未來的大規模遙感星座任務規劃、大區域遙感拍攝任務規劃等任務場景[15-17]具有較大的應用價值。
1 遙感衛星目標訪問計算方法概述
目標訪問計算主要是根據衛星星歷數據(固定時間間隔的衛星空間位置、星下點地理位置信息等)、目標地理位置信息以及衛星的約束條件,包括衛星側擺角范圍、衛星俯仰角范圍、衛星傳感器成像太陽高度角要求等計算衛星對地面目標的訪問時段及對應的姿態信息(側擺角、俯仰角等)。
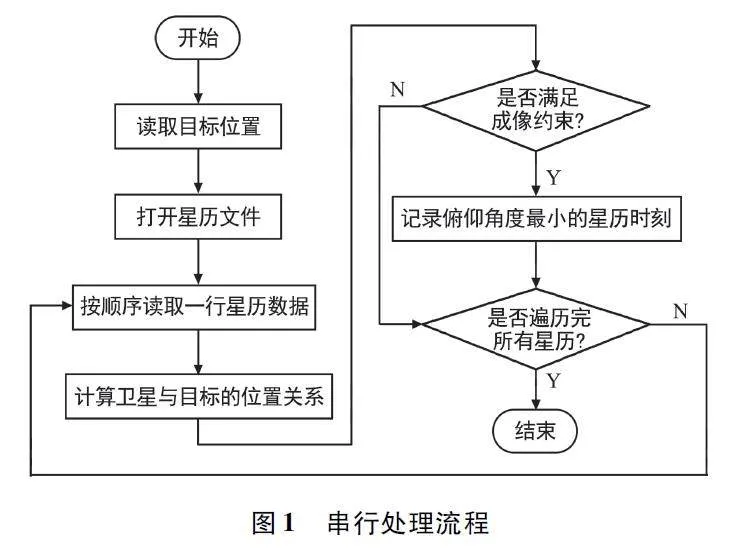
傳統目標訪問計算方法為純串行架構,逐行讀取星歷文件,計算每行衛星空間位置與目標地理位置的空間關系是否滿足成像約束(主要包括是否可視、是否滿足側擺角/ 俯仰角/ 太陽高度角約束),在滿足約束的星歷中,選擇側擺角度和俯仰角度最小的星歷時刻作為成像最佳時刻,處理流程如圖1所示。
由于星歷文件很大,串行處理過程針對每個目標都要遍歷一遍星歷文件,當面臨多星多目標時,計算量巨大,計算時間會很長,難以滿足高時效性遙感任務的要求。
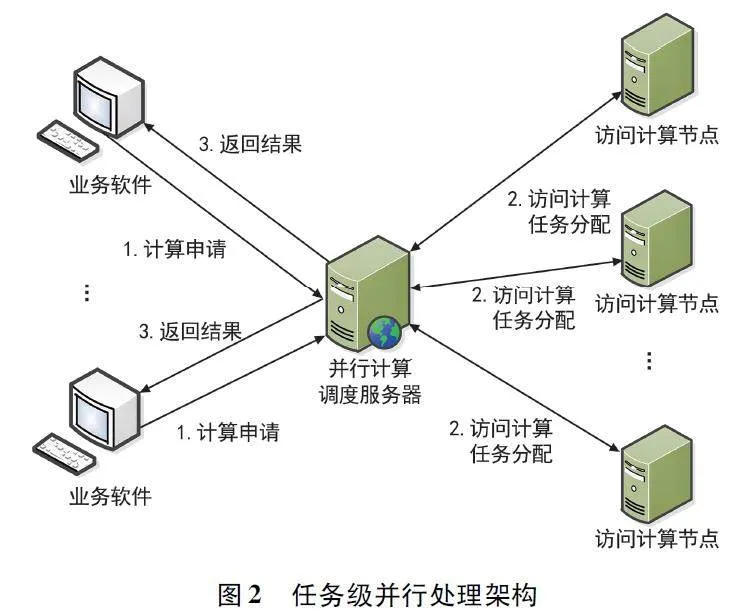
為了提高多星多目標訪問時間的計算效率,楊紀偉等[14]提出了一種雙層并行高速目標訪問計算架構,該計算架構采用任務級并行和任務內部線程級并行的雙層并行策略,任務級并行計算架構如圖2 所示。該架構由一個并行計算調服服務器和若干目標訪問計算節點組成,并行調度服務器接收多個業務軟件發送的計算申請(“目標-衛星”組合),將不同申請分配到不同的計算節點,計算節點收到計算任務后,提取存儲在本節點的星歷文件進行計算并將計算結果返回并行計算調度服務器,并行計算調度服務器將計算結果返回相應的業務軟件。
任務內部線程級并行架構采用CPU+GPU 異構架構[18],CPU 負責進行邏輯處理,GPU 負責大數據量計算。CPU 根據本節點的GPU 核數,創建上百個線程(視GPU 核數而定),將星歷拆成對應的上百段,將目標、星歷段、成像約束分配給每個線程進行計算,每個線程計算結果再返回至CPU 進行合并處理,提升了單節點的計算效率。
雖然雙層并行計算架構可大幅提升計算效率,但計算代價很大,一方面需要大量高端計算設備,硬件成本高;另一方面需要針對性的開發多節點調度系統、監控系統、多線程并行調度等專用算法,系統復雜。
2 太陽同步軌道目標訪問計算方法
2. 1 總體思路
2. 1. 1 太陽同步軌道特點
由于光學遙感衛星的成像質量與地面光照條件關系密切,光學對地觀測遙感衛星多采用太陽同步軌道[19-21]。太陽同步軌道衛星的軌道面與太陽同步旋轉,軌道平面的進動角速度應等于地球公轉角速度,從而保持軌道平面與太陽光線之間夾角不變[22],即衛星通過地球表面某一特定點時,軌道面與太陽的角度關系保持不變,地面的光照條件也不變。太陽同步軌道具有軌跡幾乎覆蓋所有緯度范圍、光照條件幾乎固定和軌道高度變化范圍廣等軌道特性[23],當衛星在幾天甚至幾周內對同一地點觀測時,太陽相對該地點的高度角不變。這種特性對某些遙感任務非常有用,可以更好地對地面或人造物的特性變化情況進行跟蹤監測。
典型太陽同步軌道高度為400 ~ 800 km,周期為96 ~100 min,根據不同的偏心率,傾角大約98°,軌道高度增加傾角也會相應地增加[24]。
此外,太陽同步軌道的另一個重要特性是衛星經過降交點(衛星由北向南飛行經過赤道時,衛星軌道與赤道面的交點)或升交點(衛星由南向北飛行經過赤道時,衛星軌道與赤道面的交點)的地方時基本保持不變[25]。在地面跟蹤監測活動中,利用太陽同步軌道衛星的兩大特點,可為遙感任務部署提供理論依據。
2. 1. 2 地方時的相關概念
本文與地方時相關的3 個概念分別是:
① 地方時。是指一個特定地理位置所對應的時間,它由地球自轉和公轉規律決定,并且會因經度的不同而有所差異。在地球不同的地方,由于經度不同,太陽經過各地子午線的時間也會有所不同,因此將太陽針對某地子午線的時間定為該地中午12:00:00,這樣定出來的時間就是地方時。地方時是按本地經度測定的時刻,地球表面經度每隔15°,地方時相差1 h,如北京和西安的經度分別是東經116°19′和東經108°55′,兩地經度差是7°24′,則兩地的地方時相差29 min36 s,即當北京地方時為正午12:00:00 時,西安的地方時則為11:30:24[26]。
② 時區。為了按統一標準分區計時,1884 年國際經度會議制定的《世界時區劃分標準》將全球劃分為24 個時區,以本初子午線(0°經線)為基準,規定西經7. 5° ~ 東經7. 5°為中時區(也叫零時區),中時區以東依次為東1 區~ 東12 區(也可以表示為1 區~12 區),中時區以西依次為西1 區~ 西12 區(也可以表示為-1 區~ -12 區),每個時區跨越經度均為15°,需要注意的是東12 區和西12 區各跨越經度7. 5°[27-28]。為了計算方便,西半球的時區可用負數表示。
根據經度計算時區的方法為:經度的絕對值除以15°,當余數小于7. 5°時,商即所在時區,當余數大于7. 5°時,商+1 為所在時區,如果經度為正,則為東半球時區,如果經度為負,則為西半球時區。
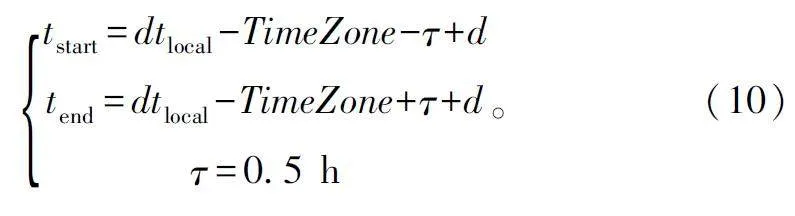
③ 區時。劃分時區后,各時區需要有一個統一的時間來代表整個時區的時間,將各時區中央經線的地方時作為該時區的統一時間,該統一時間稱為本時區的區時,在一個時區內,任意一點的地方時與區時的最大時差為0. 5 h。
2. 1. 3 處理流程
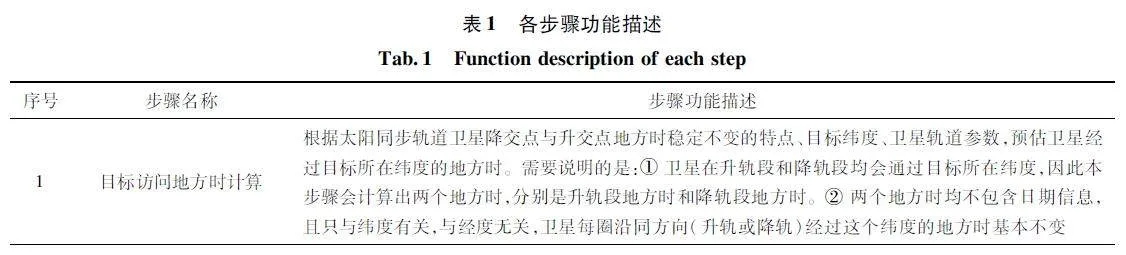
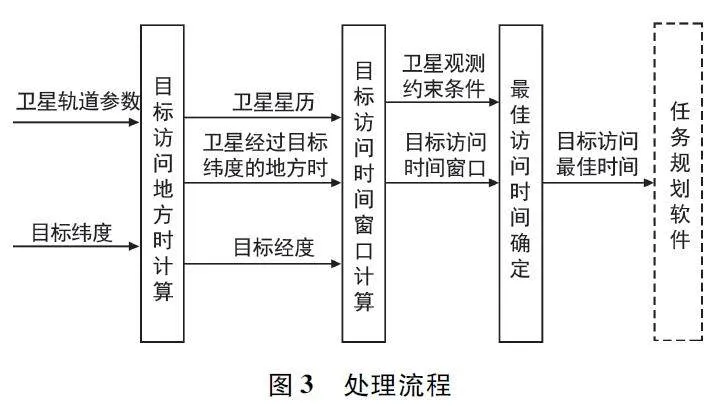
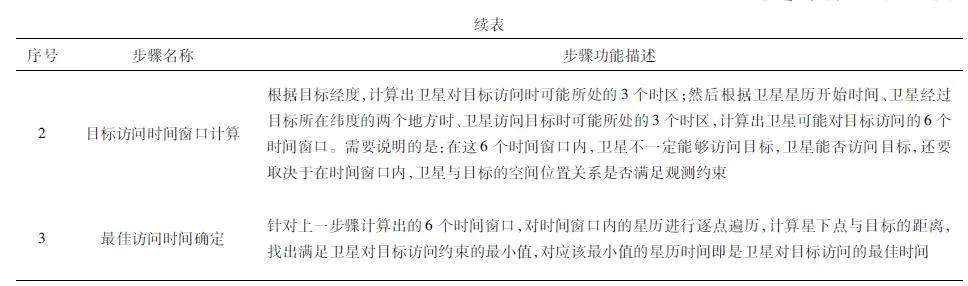
本計算方法包括3 個步驟:目標訪問地方時計算、目標訪問時間窗口計算、最佳訪問時間確定,如圖3 所示。各步驟功能具體描述如表1 所示。
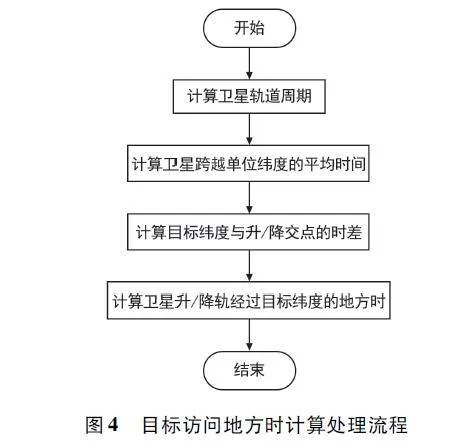
2. 2 目標訪問地方時計算
目標訪問地方時計算的處理流程如圖4 所示,具體包括:① 根據衛星軌道半長軸計算衛星軌道周期;② 根據衛星軌道周期和衛星軌道傾角計算衛星跨越單位緯度的平均時間;③ 根據目標緯度、升/ 降交點地方時計算衛星在升/ 降軌段經過目標所在緯度時的地方時。
具體計算步驟和方法如下。
① 計算衛星在緯度方向每經過1°的平均時間,首先計算衛星軌道周期:
式中:P 為衛星軌道周期(單位s);μ 為地球引力常量,值為3. 986 004 415×1014(單位m3 / s2);a 為衛星軌道半長軸(單位m)。
衛星軌道星下點最大緯度約等于衛星軌道傾角i,太陽同步軌道衛星的軌道傾角i 均大于90°,約為98°(與衛星軌道高度相關),太陽同步軌道衛星運行一圈跨域的緯度范圍:
Rlat≈(180-i)×2。(2)
則衛星在緯度方向每經過1°的平均時間:
Tperlat≈P/ Rlat。(3)
② 太陽同步軌道衛星的降交點地方時為ltDescNode,升交點地方時為ltAscNode,目標的緯度為latTarget(北半球為正數,南半球為負數),目標的經度為lonTarget(東半球為正數,西半球為負數),則衛星經過目標所在緯度與降交點或升交點的時差為:
Δt=latTarget / Tperlat。(4)
因此,如果目標在北半球,Ct 為正數;如果目標在南半球,Ct 為負數。
③ 在降軌(衛星從北向南飛行)段對目標進行訪問時,如果目標在北半球,衛星經過目標所在緯度的地方時會早于降交點地方時;如果目標在南半球,衛星經過目標所在緯度的地方時會晚于降交點地方時,衛星經過目標所在緯度的地方時dtlocal 應為降交點地方時減去時差Ct,即:
dtlocal =ltDescNode -Δt 。(5)
④ 在升軌(衛星自南向北飛行)段對目標進行訪問時,如果目標在北半球,衛星經過目標所在緯度的地方時會晚于升交點地方時;如果目標在南半球,衛星經過目標所在緯度的地方時會早于升交點地方時,則衛星經過目標所在緯度的地方時atlocal 應為升交點地方時加上時差Ct,即:
atlocal =ltAscNode +Δt。(6)
⑤ 至此,估算出了衛星經過目標所在緯度的地方時,之所以是估算值是因為衛星并非絕對勻速運動,tperlat 為平均值,Ct 存在一定誤差,導致dtlocal 與atlocal 也存在誤差。
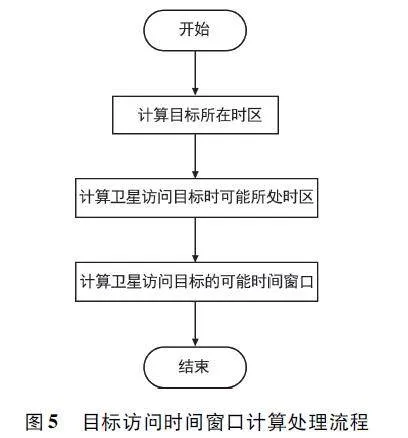
2. 3 目標訪問時間窗口計算
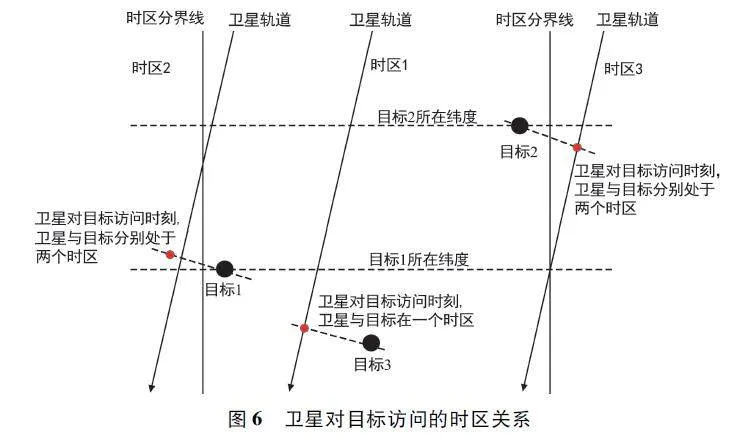
目標訪問時間窗口計算的處理流程如圖5 所示。衛星對目標訪問的時區關系如圖6 所示。
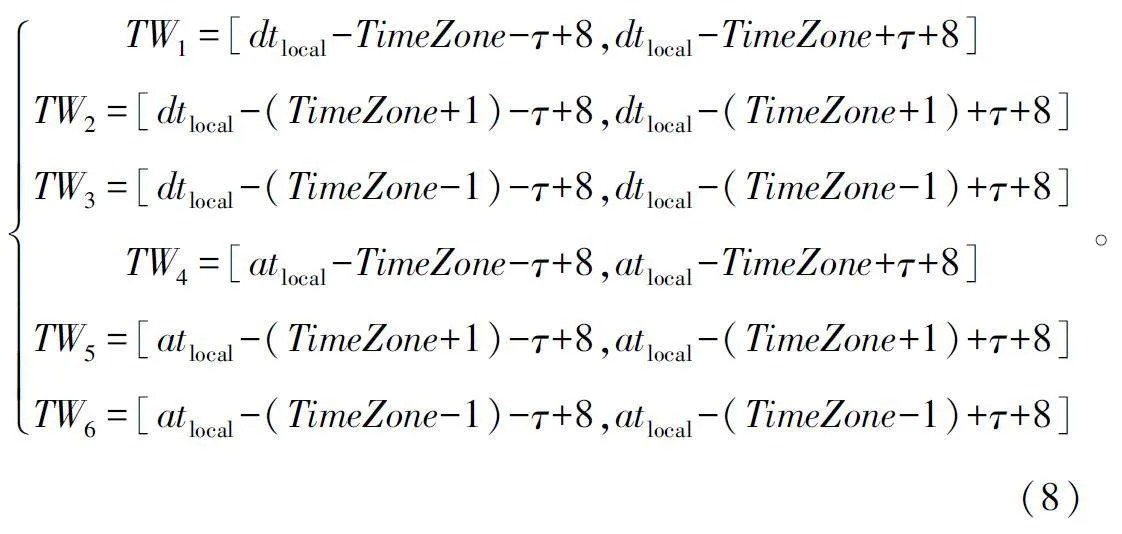
① 根據目標的經度lonTarget 計算出目標所在的時區,需要注意的是,絕大多數情況下,目標不在衛星運行軌道的正下方,而是分布在衛星軌道左右,衛星需要向左或向右側擺對目標進行訪問,所以衛星經過目標附近的軌道有可能和目標不在一個時區,如圖6 所示,因此還需要考慮時區的左右相鄰時區,分別為時區+1 和時區-1。
式中:t0 為星歷的開始時間,tspace 為星歷時間間隔,通常為1 s。如果Start<0(星歷索引從0 開始),則令Start = 0,如果End 大于星歷最大索引值,則令End 等于星歷最大索引值。
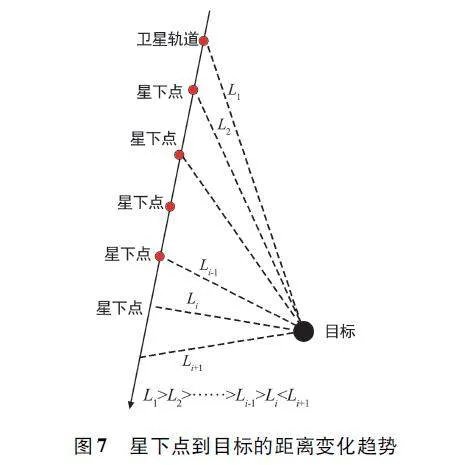
③ 在星歷搜索范圍(Start,End)內按順序逐一計算星下點與目標點的球面距離Li (i ∈ [Start,End]),當Li- 1 >Li <Li+1 時,如圖7 所示,判斷Li 是否小于衛星最大觀測范圍。如果Li 小于衛星最大觀測范圍,則Li 對應星歷的時刻即是目標訪問最佳時刻,反之,表明衛星在本軌道圈次內不能訪問目標。
④ 針對DTW2 ~ DTW6,分別執行步驟① ~ ③,搜索衛星對目標的訪問時間。
2. 5 計算效率提升預估
針對一個目標,考慮升軌段目標訪問和降軌段目標訪問兩種情況,每種情況再考慮3 個相鄰時區,每個時區搜索窗口為1 h,1 d 之內全部搜索范圍為6 h,相對于傳統算法24 h 搜索范圍,計算效率提升優于4 倍。
3 試驗分析與評價
3. 1 試驗數據與試驗環境
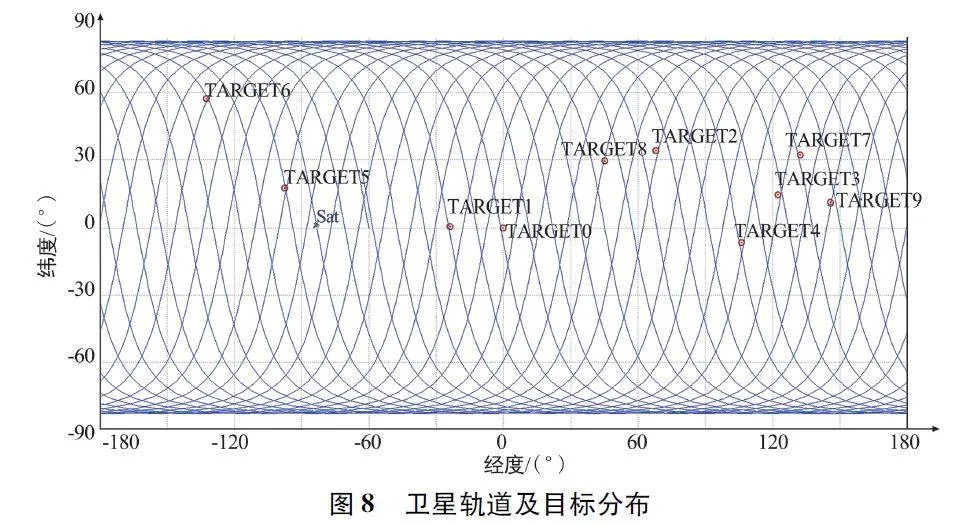
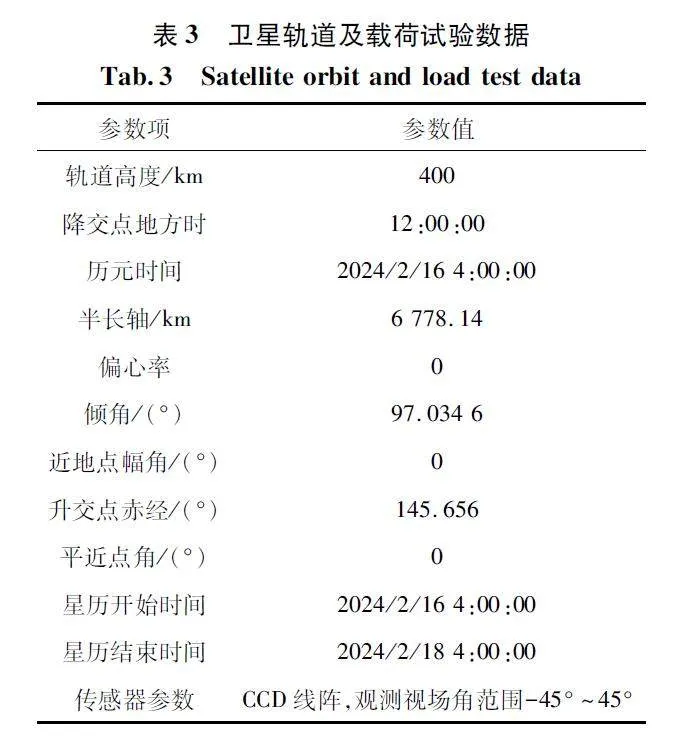
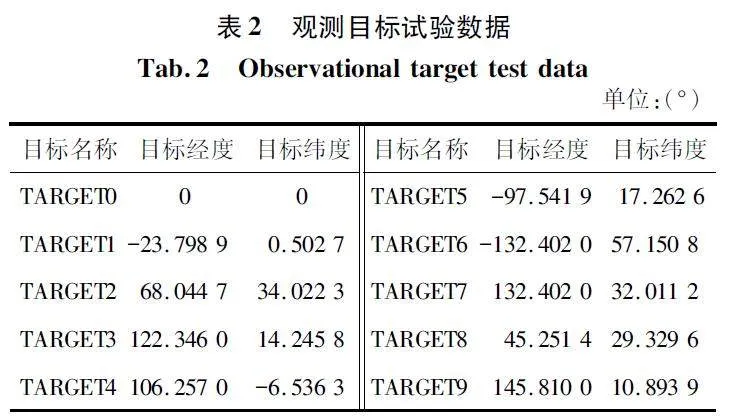
本節基于10 個觀測目標和48 h 的星歷,與傳統串行計算方法進行對比。觀測目標試驗數據如表2 所示。衛星軌道及載荷試驗數據如表3 所示。衛星軌道及目標分布如圖8 所示。
試驗環境為通用臺式計算機,配置為:處理器Intel - Core(TM)i5-6500 CPU@3.20 GHz 3.20 GHz,內存8. 00 GB(7. 89 GB 可用),硬盤1 TB,操作系統Window 7 64 位。
3. 2 目標所在時區計算
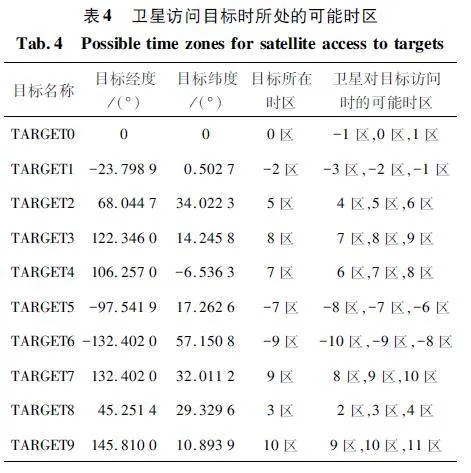
以目標TARGET1(-23. 798 9°,0. 502 7°)為例,計算目標所處時區:| -23. 798 9 | /15 =1……8. 798 9,因為余數大于7. 5 且目標經度為負,所以目標所在時區為西2 區,也可以表達為-2 區,該區地方時(LT)比UTC 晚2 h,即:LT = UTC-2,則衛星對目標訪問時所處的可能時區包括-1 區、-2 區、-3 區,計算出所有目標的可能訪問時區,如表4 所示。
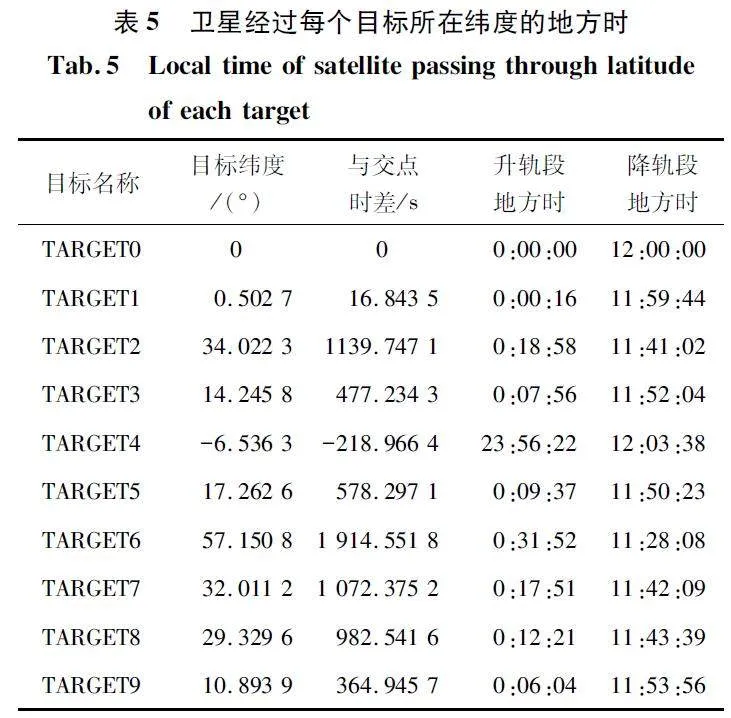
3. 3 計算衛星經過該目標所在緯度的時刻
根據式(1)太陽同步軌道衛星軌道周期計算如下:
衛星軌道傾角為97. 034 6°,在南北緯82. 965 4°范圍內運動,緯度方向每運行1°的時間長度約為5 553 / (82. 965 4×2)≈33. 5 s。衛星降交點地方時為12:00:00,升交點地方時為00:00:00,據此計算衛星經過每個目標所在緯度的地方時,如表5所示。
3. 4 目標訪問窗口計算
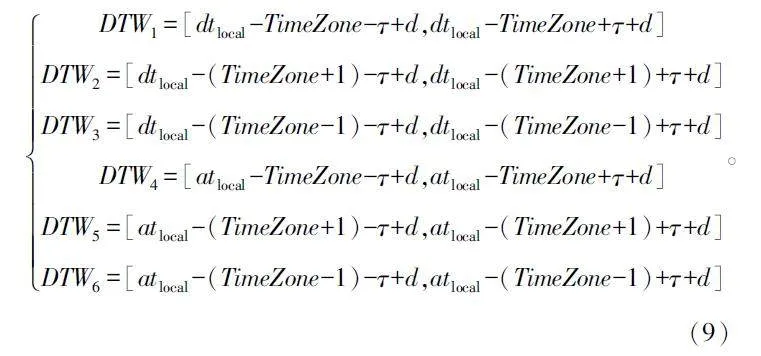
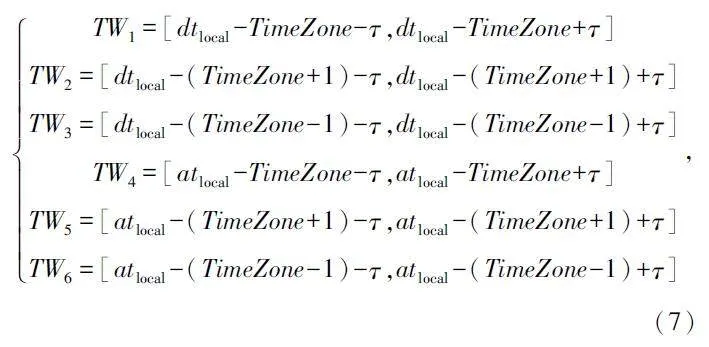
以衛星對目標TARGET1(-23. 798 9,0. 502 7)在-3 區降軌段訪問時間窗口計算為例,依據式(8)計算衛星對目標訪問的時間窗口:TW1 = [dtLocal -TimeZone-τ, dtLocal -TimeZone+τ]= [11:59:44 -(-3:00:00)- 00:30:00,11:59:43-(-3:00:00)+00:30:00]=[14:29:44,15:29:44];依據式(9),為時間窗口添加日期信息:DTW1 = TW1 +d = [2024 /2 /16 +14:29:44,2024 /2 /16+15:29:44]= [2024 /2 /1614:29:44,2024 /2 /16 15:29:44]。
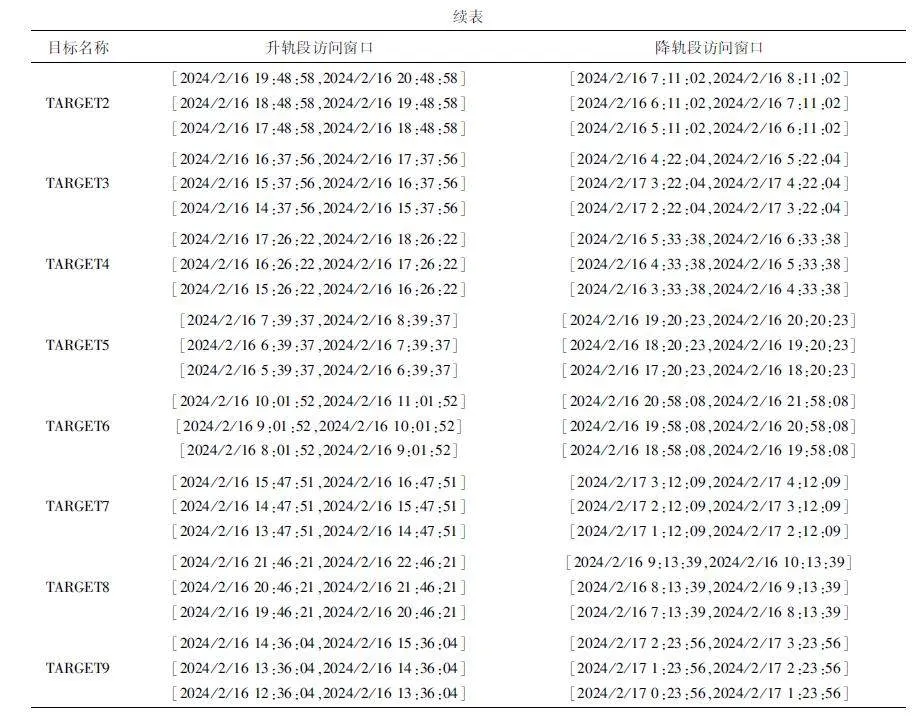
如此計算出每個目標的6 個訪問時間窗口,如1表6 所示。
3. 5 目標訪問時間確定
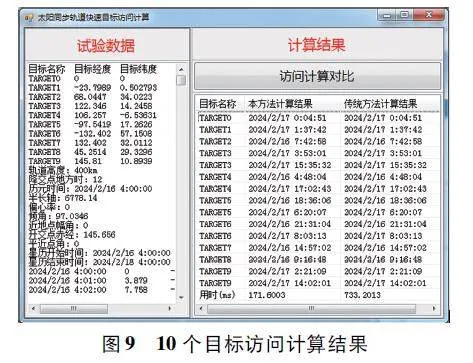
針對表6 中每個目標的6 個可能的訪問時間窗口,逐點計算該時間窗口內各星下點與目標的距離,最小距離如果滿足衛星觀測約束,則該星下點的對應時間即為目標訪問最佳時間,10 個目標訪問時間計算結果如圖9 所示,可以看出本方法與傳統方法的耗時比為171 ∶ 733≈1 ∶ 4. 3,與前文預估的效率提升結果相符。
在上述試驗的基礎上,又分別針對5、10、100、1 000 個目標分別在24 h 星歷時長、48 h 星歷時長的情況下,對計算效率進行了比較,計算效率均提升4 倍以上,如表7 所示。
4 結束語
本文提出了一種太陽同步軌道遙感衛星對目標訪問時間進行快速計算的方法,根據衛星軌道參數和目標位置,快速計算出衛星對目標可能訪問的6 個時間窗口,每個窗口長度為1 h,然后在6 個窗口內搜索計算衛星對目標訪問的最佳時間,相對于傳統串行計算方法,計算效率提升4 倍以上,相對于并行計算方法,大幅效降低計算硬件成本,簡化開發方法,具有較大的工程應用價值。
參考文獻
[1] 馮志強,何濤,朱永生,等. 遙感衛星任務規劃系統設計[J]. 航天控制,2021,39(2):17-23.
[2] 張棟. 探討基于遙感衛星星座的任務規劃方法[J]. 電子元器件與信息技術,2021,5(3):240-241.
[3] 李冬,唐容富,易東云. 對地觀測衛星訪問區域目標時間窗口快速算法[J]. 上海航天,2010,27(3):1-5.
[4] 劉曉東,陳英武,龍運軍. 基于MapX 的多星協同對區域目標觀測的預處理方法[J]. 系統工程理論與實踐,2010,30(12):2269-2275.
[5] 黃群東,楊芳,趙鍵. 新型敏捷衛星機動中成像模式研究[C]∥第三屆高分辨率對地觀測學術年會優秀論文集. 北京:[出版者不詳],2014:98-106.
[6] 趙汝哲,林元,彭會湘,等. 基于高程信息的衛星訪問計算方法[J]. 無線電工程,2017,47(12):67-70.
[7] 田帥虎,楊芳,李超,等. 北京三號A/ B 衛星星地一體協同任務規劃設計及實現[J]. 航天器工程,2023,32(3):44-50.
[8] 劉曉東,陳英武,賀仁杰,等. 基于空間幾何模型的遙感衛星任務分解算法[J]. 系統工程與電子技術,2011,33(8):1783-1788.
[9] 張淳,張強,趙陽,等. 一種面向成像衛星的啟發式分層任務規劃方法[J]. 航天控制,2021,39(2):45-50.
[10]尹璐. 多載荷對地觀測衛星目標訪問計算及任務調度方法的研究[D]. 長沙:國防科學技術大學,2012.
[11]韓麗,張學慶. 基于模擬退火的衛星地面站任務規劃方法[J]. 無線電工程,2010,40(9):42-43.
[12]張超. 基于貪婪算法的遙感地面站任務調度技術[J].無線電工程,2011,41(1):58-60.
[13]許宇棟,周敬博,尹嘉昭,等. 對地觀測衛星任務規劃策略及應用研究綜述[J]. 無線電工程,2021,51(8):681-690.
[14]楊紀偉,趙汝哲,張學亮,等. 基于雙層并行架構的高速目標訪問計算技術[J]. 無線電工程,2020,50(11):944-950.
[15]朱閱訸. 面向大規模目標訪問任務的飛行序列規劃方法[D]. 長沙:國防科技大學,2020.
[16]楊紀偉,付偉,韓麗,等. 基于全球網格的衛星成像區域目標規劃算法[J]. 航天器工程,2021,30(1):31-37.
[17]孟祥強,李峰,鐘興,等. 基于多要素疊加的大區域遙感拍攝分解研究[J]. 遙感技術與應用,2023,38(4):767-775.
[18]盛艷秀. 多核異構環境下通用并行計算框架關鍵技術研究[D]. 青島:中國海洋大學,2013.
[19]車航宇,史小金,莊超然,等. 國產陸地觀測衛星任務規劃及應急成像概述[J]. 衛星應用,2019(10):31-33.
[20]張海洋,張剛. 地面多目標快速響應任務軌道設計[J]. 宇航學報,2023,44(5):677-686.
[21]李偉建,劉旭光,劉興威,等. 入軌精度對降交點地方時的影響分析[J]. 航天控制,2023,41(5):68-73.
[22]張勇,鄢婉娟,蘇蛟,等. 太陽同步軌道衛星電源系統供電模型及任務規劃方法[J]. 西北工業大學學報,2019,37(增刊1):1-7.
[23]左霖,尹增山,程蛟,等. STK 在太陽同步軌道降交點地方時仿真中的應用[J]. 航天控制,2016,34(1):70-74.
[24]超級loveovergold. 太陽同步軌道,傾角總在98 度處[J]. 衛星與網絡,2017(12):56-63.
[25]陳潔,湯國建. 太陽同步衛星的軌道設計[J]. 上海航天,2004(3):34-38.
[26]《地球科學大辭典》編委會. 地球科學大辭典[M]. 北京:地質出版社,2005.
[27]CHAOS. 兩地穿梭[J]. 鐘表,2022(4):36-45.
[28]CHAOS. 環球旅行[J]. 鐘表,2022(4):46-53.
作者簡介:
彭會湘 男,(1973—),碩士,研究員。
劉 剛 男,(1986—),博士,高級工程師。
陳金勇 男,(1970—),碩士,研究員。
陳韜亦 男,(1984—),博士,研究員。
李 爍 男,(1999—),碩士研究生。
